Изобретение относится к информационно-измерительной системе и может быть использовано в радиолокационной технике для высокоточной оценки ледовой обстановки в районах морской добычи и транспортировки нефтегазовых ресурсов.
Известны способы, в которых для мониторинга ледовой обстановки в Арктике используются радиолокаторы (патент РФ №2319205). Радиолокационные устройства позволяют получать информацию об исследуемой поверхности независимо от наличия облачного покрова и ее освещенности, т.е. в любое время суток. Указанное свойство радиолокационных данных представляет особую ценность при решении задач, связанных с необходимостью получения информации о состоянии ледяного покрова в сжатые сроки независимо от погодных условий и времени суток, а также при решении задач, требующих осуществления непрерывного мониторинга исследуемого района. К подобным задачам относятся работы по информационному обеспечению круглогодичной навигации на Севморпути судов, оказавшихся в тяжелых ледовых условиях Арктики и Антарктики, для оценки ледовой обстановки в районах морской добычи и транспортировки нефтегазовых ресурсов. Кроме того, обширные территории России характеризуются низкой плотностью населения и труднодоступностью, что существенно ограничивает возможности наземных исследований. Точная координатная привязка информации обзора морских, прибрежных и материковых зон земной поверхности по данным спутниковой навигационной системы оперативно отражается на борту аппарата с передачей по линиям связи на наземный пункт управления, то есть эффективным источником информации о ледяном покрове в полярных районах Земли являются спутниковые радиолокационные наблюдения.
Известна система для оценки ледовой обстановки в районах морской добычи и транспортировки нефтегазовых ресурсов (патент США №6188348), которая является составной частью комплексной многоуровневой автоматизированной структуры мониторинга. Также она находит применение при оценке состояния элементов инфраструктуры объектов топливно-энергетического комплекса. Многочастотные радиолокационные комплексы с синтезированной аппаратурой работают в четырех диапазонах длин волн при различных поляризациях зондирующего сигнала. Обработка информации позволяет получить детальные радиолокационные изображения объектов скрытых дымом, туманом, растительностью, снегом или грунтом. Точная координатная привязка информации обзора морских, прибрежных и материковых зон земной поверхности по данным спутниковой навигационной системы оперативно отражается на борту летательного аппарата с передачей по линиям связи на наземный пункт управления. Согласно рекомендациям Международной Морской Организации (International Marina Organization (IMO)) наибольшее распространение на судах получили импульсные РЛС 10 см диапазона (S-band, 3 ГГц) и 3 см диапазона (X-band, 9,3-9,5 ГГц). Типичные уровни импульсной мощности передатчиков составляют 25-30 кВт, линейные размеры антенн до 4 м. Поляризация - горизонтальная. Дисплеи для наблюдения целей обычно имеют только 2 уровня разрешения по контрасту (т.е. обнаружение в двоичной системе: «да-нет») и не позволяют отслеживать медленно движущиеся цели с малой эффективной площадью рассеивания (ЭПР). Как следует из приведенных в литературе данных ЭПР айсбергов обычно на 1-2 порядка меньше, чем ЭПР судов той же площади. Поэтому наблюдение объектов типа айсбергов, обломков айсбергов, льдин затруднено.
Также известны радиолокационные ледовые зонды, включающие в себя радарную установку, излучающую нисходящий волновой фронт на поверхность и внутреннее пространство ледового покрова, приемное устройство, собирающее отраженные сигналы и когерентную обработку собранных сигналов (публикация КНР № CN 101105395 A). Известные радарные установки для измерения толщины и местонахождения морского льда могут работать в движущемся режиме морской среды с использованием радаров со сверхширокой полосой и короткоимпульсной шириной в качестве средства обнаружения морского льда. В радиолокационных системах (РЛС), устанавливаемых на берегу, применяются специальные процессоры для детектирования малых целей. Рекомендуется использовать одновременно наблюдение в 2-х (S и X) диапазонах, так как в Х-диапазоне обеспечивается лучшее разрешение по азимуту, а в S-диапазоне - меньший уровень помех от морских волн и осадков. Кроме того, рекомендуется применять круговую поляризацию для уменьшения уровня отражения от осадков. Для кинематических измерений используются системы микроволновой доплеровской РЛС. Оформление ледовых карт осуществляют по результатам изображений морских льдов («Исследование ледяного покрова с помощью радиолокационных станций бокового обзора». Методическое пособие. Арктический и Антарктический научно-исследовательский институт. Гидрометеоиздат, 1983, стр.108).
Наиболее близким аналогом (прототипом) способа радиолокационной оценки, который позволяет эффективно исследовать неизвестные и быстроменяющиеся фарватеры, может обеспечить повышение безопасности судоходства и добычу полезных ископаемых с морского дна, является осуществление действий по обнаружению изменений двумя интерферометрическими антеннами на величину зондирующего сигнала, мониторинг, построение карт изменений, анализ изменений (Сертификат соответствия комплекса «ГИДРА» №0000906. Зарегистрирован в реестре системы сертификации средств измерений 25 октября 2009 года. Описание работы комплекса обнаружено в Интернете 03.02.2011, www.screen-co.ru). Использование интерференционных радаров обеспечивает построение карт изменений, неровностей, может осуществлять мониторинг.
К недостаткам следует отнести то, что данное техническое решение не может осуществлять действия по определению состояния взволнованности морской поверхности при значительном увеличении в арктических морях числа транспортных перевозок, которые должны быть регулярными и не зависеть от погодных условий, поскольку нередко бывают дожди, снегопады и туманы. Эти факторы чрезвычайно затрудняют условия добычи полезных ископаемых на шельфе и повышают опасность судоходства в районах морской добычи и транспортировки нефтегазовых ресурсов. Данным способом невозможно определить радиолокационную оценку ледовой обстановки, невозможно производить замеры толщины льда, измерять скорость движения льда, его местонахождение, определять величину торосов, сплоченность льда, то есть описанный прототип не может обеспечить знание ледовой обстановки в местах добычи полезных ископаемых.
Для устройства наиболее близким аналогом (прототипом) является система для создания пространственной приемной базы информации отображения параметров посредством двух антенн для получения результатов оценки обстановки (патент РФ №2170442), которое включает в себя антенный блок из двух антенн, усилители мощности, усилители высокой частоты, усилители промежуточной частоты, смесители, фазовые детекторы, фазовращатель.
К недостаткам следует отнести то, что данное техническое решение не может представить характеризующие факторы радиолокационной оценки ледовой обстановки, не может производить замеры направления дрейфа, измерять скорость движения льда, определять величину торосов, сплоченность льда, то есть концентрацию морского льда в исследуемой акватории. Это объясняется тем, что в условиях Арктики имеются особенности распространения радиоволн сантиметрового и миллиметрового диапазонов. А именно, при заданных условиях на РРВ (распространение радиоволн) СМ (сантиметрового), ММ (миллиметрового) диапазонов влияют характеристики нижнего слоя тропосферы, примыкающего к поверхности моря. Исследования условий РРВ данных диапазонов в тропосфере проводятся длительное время, начиная с конца второй мировой войны. В настоящее время выяснены основные физические механизмы распространения радиоволн в тропосфере. Они заключаются в следующем: а) ослабление радиоволн обусловлено двумя факторами, во-первых, поглощением радиоволн в молекулах воздуха (в основном в молекулах кислорода и водяного пара) и, во-вторых, поглощением и рассеянием радиоволн в гидрометеорах (дожде, снеге, туманах). Спецификой распространения радиоволн над морской поверхностью является поглощение и рассеяние волн в приводном слое атмосферы, характеристики которого существенно зависят от метеоусловий, б) рассеяние радиоволн на осадках в обратном направлении на РЛС является помехой, в) деполяризация радиоволн в тропосфере возникает при рассеянии на осадках. г) регулярная рефракция радиоволн обусловлена тем, что показатель преломления воздуха в тропосфере отличается от единицы и меняется как по вертикали к поверхности Земли, так и вдоль поверхности, д) флуктуации показателя преломления могут приводить к дополнительным эффектам рефракции и рассеяния радиоволн. Этот фактор проявляется на больших расстояниях (сотни км) и далее рассматриваться не будет.
Задачей, на решение которой направлено предлагаемое изобретение, является создание высокоэффективной радиолокационной системы оценки ледовой обстановки и предупреждения о приближении опасных объектов, таких как айсберги, обширные ледовые поля, торосы, крупные льдины, а также с возможностью определения их координат, направления движения, скорости. В частности, для устройства задачей является создание радиолокационной техники, предназначенной для высокоточной оценки ледовой обстановки в районах морской добычи и транспортировки нефтегазовых ресурсов, предположительно в Баренцевом море. При этом созданная радиолокационная техника должна обеспечить выполнение поставленной задачи при следующих заданных исходных данных. А именно: высота расположения РЛС (радиолокационной системы) над уровнем моря приблизительно 25 м, обеспечение максимальной дальности действия РЛС до 20 км, обеспечение возможности измерения обломков дрейфующих ледовых полей и крупнобитого льда с точностью до 1 м, расстояния между грядами торосов - с точностью до 1 м, высотой паруса тороса - с точностью до 5 см. Кроме того, созданной радиолокационной техникой необходимо определять скорость движения дрейфующих полей и крупногабаритного льда по направлению к морским добывающим платформам, также обеспечить бесконтактное измерение толщины опасных ледяных образований с толщиной льда более 50 см, с точностью до 10 см. В процессе работы должны быть определены размеры ледового поля, то есть его величина, охватываемая предлагаемыми техническими средствами. Высокоточная оценка ледовой обстановки, определяемая радиолокационными методами, имеет следующие основные параметры: распознавание типа льда; оценка сплоченности льда; исследование степени неровности ледовой поверхности; измерение вектора скорости движения льдов; измерение толщины льда; оценка температуры ледовой поверхности. Необходимо, решение задачи распознавания типов льда представляется весьма важным, поскольку от его результатов во многом зависят последующие процедуры радиолокационного мониторинга ледовой обстановки. В частности, стоит задача определить: в первую очередь, относятся ли обнаруженные радаром льды к типу толстых однолетних или многолетних, представляющих наибольшую опасность для нефтегазодобывающих платформ и уже далее с помощью байесовых методов при заданной вероятности ложной тревоги вычисляются значения вероятностей правильной классификации типов льдов. Необходимо решение задачи определения концентрации морского льда в исследуемой акватории, то есть определения процентного содержания собственно льда на радиолокационном изображении. Следует отметить, что степень неровности ледовой поверхности и ее топография определяются двумя методами: грубым - по величине УЭПР (удельной эффективной площади рассеивания) и точным - с помощью процедуры интерферометрических измерений. К поставленным задачам следует также отнести определение точных значений комплексной диэлектрической проницаемости, без которых вносится значительная неопределенность в результаты измерения СКО (среднего квадратичного отклонения) и радиуса корреляции ледяной поверхности, поскольку величина УЭПР зависит от геометрических и электрофизических свойств льда. Кроме того, амплитудные измерения параметров заведомо проигрывают в точности фазовым и, в частности, интерферометрическому методу. Задачей является также измерение скорости движения льда для оценки ледовой обстановки в районах морской добычи и транспортировки нефтегазовых ресурсов, поскольку при использовании когерентных радаров скорость может производиться классическим доплеровским методом, а для некогерентных радаров можно использовать метод дифференцирования дальности до передней кромки ледяного поля. А в отличие от доплеровского метода, при котором потенциально оценивается вектор скорости, при использовании второго метода оценивается только величина радиальной скорости такого объекта. К задачам следует отнести измерение толщины морского льда.
Техническими результатами при реализации изобретения в частности являются: повышение эффективности радиолокационной оценки ледовой обстановки для предупреждения о приближении к местам добычи нефтегазовых ресурсов арктических льдов, улучшение определения их координат, направления движения, скорости, увеличение дальности действия РЛС, повышение точности измерения обломков дрейфующих ледовых полей и крупнобитого льда, расстояний между грядами торосов, высоты паруса тороса, определения размеров ледового поля. Кроме того, к техническим результатам следует отнести снижение трудоемкости оценки ледовой обстановки, уменьшение времени определения координат, направления движения, скорости размеров ледового поля, а также упрощение измерений различного рода его неровностей и повышение точности измерений.
Влияние на достижение указанных технических результатов оказывают следующие существенные признаки: В способе обнаружения и высокоточного определения параметров морских ледовых полей, включающем действия на дистанции по обнаружению изменений радиоизлучениями двумя интерферометрическими антеннами на величину зондирующего сигнала, действия по обработке сигналов, созданию мониторинга измерений, построению карт изменений, анализу изменений радиоизлучение производят с одной из двух разнесенных по высоте антенн, отраженные сигналы принимают двумя антеннами, при этом отраженные сигналы разбиваются на секции и производятся вычисления каждой свертки посекционно, спектр каждой секции перемножается почленно со спектром опорной функции, над результатом перемножения проводится операция комплексного сопряжения и далее над этим выражением проводится операция преобразования функций и повторно берется комплексное сопряжение от результата операции преобразования функций для сжатия эхо-сигналов интерферометрических антенн и накопления результатов сжатия по обнаружению кромки ледового поля, его фрагментов, оценки скорости дрейфа, направления дрейфа, торосистости ледовой поверхности.
В радиолокационной системе обнаружения и высокоточного определения параметров морских ледовых полей, которая включает в себя блок антенной системы из двух антенн, усилители мощности, усилители высокой частоты, усилители промежуточной частоты, смесители, фазовые детекторы и фазовращатель, имеется блок управления РЛС, синтезатор частот, генератор М-кода, модулятор частотного диапазона 8,6 мм, модулятор частотного диапазона 3,2 см, СВЧ коммутатор, блок управления антенной системой, устройство временной автоматической регулировки усиления, коммутатор промежуточной частоты, усилитель промежуточной частоты, блок автоматической и ручной регулировки усиления, первый блок аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй блок аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, блок первичной цифровой обработки, состоящий из двухпортового буферного оперативного запоминающего устройства и цифрового измерителя, причем двухпортовое буферное оперативное запоминающее устройство включает в себя процессор сжатия ФМн (сигнал с фазовой псевдослучайной манипуляцией) сигналов и обнаружитель, а цифровой измеритель состоит из счетчика дальности, процессора БПФ (быстрое преобразование Фурье), цифрового коррелятора интерферометра и собственно цифрового измерителя, при этом антенный блок включает в себя первую антенну приемно-передающую частотных диапазонов 3,2 см и 8,6 мм и разнесенную с ней по высоте вторую антенну приемную частотного диапазона 8,6 мм, причем блок управления РЛС соединен с СВЧ коммутатором, также соединен с синтезатором частот, с коммутатором промежуточной частоты, с устройством временной автоматической регулировки усиления, с блоком автоматической и ручной регулировки усиления, с двухпортовым буферным оперативным запоминающим устройством, с цифровым измерителем а также двусторонней связью с блоком управления антенной системой, синтезатор частот соединен с генератором М-кода, с блоком управления РЛС, с модулятором частотного диапазона 8,6 мм и с модулятором частотного диапазона 3,2 см, с первым смесителем частоты, со вторым смесителем частоты, со вторым блоком фазовых детекторов, с фазовращателем, с первым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, со вторым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму и с цифровым измерителем, при этом генератор М-кода соединен с модулятором частотного диапазона 8,6 мм и с модулятором частотного диапазона 3,2 см, модулятор частотного диапазона 8,6 мм соединен с первым усилителем мощности, модулятор частотного диапазона 3,2 см соединен со вторым усилителем мощности, а первый усилитель мощности и второй усилитель мощности соединены с СВЧ (сверхвысокое частоты) коммутатором, причем СВЧ коммутатор соединен с блоком управления антенной системой, блок управления антенной системой соединен с первым усилителем высокой частоты, со вторым усилителем высокой частоты, с цифровым измерителем и двусторонней связью с первой антенной, а вторая антенна соединена с блоком управления антенной системой, причем первый усилитель высокой частоты соединен с первым смесителем частоты, второй усилитель высокой частоты соединен со вторым смесителем частоты, при этом первый смеситель частоты соединен с первым усилителем промежуточной частоты, второй смеситель частоты соединен со вторым усилителем промежуточной частоты, устройство временной автоматической регулировки усиления соединено с первым усилителем промежуточной частоты и со вторым усилителем промежуточной частоты, первый усилитель промежуточной частоты соединен с коммутатором промежуточной частоты, второй усилитель промежуточной частоты тоже соединен с коммутатором промежуточной частоты, а коммутатор промежуточной частоты соединен с усилителем промежуточной частоты, причем блок автоматической и ручной регулировки усиления соединен с усилителем промежуточной частоты, усилитель промежуточной частоты соединен с первым блоком фазовых детекторов, со вторым блоком фазовых детекторов и с блоком автоматической и ручной регулировки усиления, фазовращатель соединен с первым блоком фазовых детекторов, при этом первый блок фазовых детекторов соединен с первым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй блок фазовых детекторов соединен со вторым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, первый блок аналого-цифровых преобразователей квадратурных сигналов в цифровую форму соединен с двухпортовым буферным оперативным запоминающим устройством блока первичной цифровой обработки, и второй блок аналого-цифровых преобразователя квадратурных сигналов в цифровую форму тоже соединен с двухпортовым буферным оперативным запоминающим устройством блока первичной цифровой обработки, причем в блоке первичной цифровой обработки двухпортовое буферное оперативное запоминающее устройство соединено с цифровым измерителем, а цифровой измеритель обеспечивает направление сигнала на вторичную цифровую обработку.
Отличительными признаками в предлагаемом способе обнаружения и высокоточного определения параметров морских ледовых полей радиоизлучение производят с одной из двух разнесенных по высоте антенн, отраженные сигналы принимают двумя антеннами, при этом отраженные сигналы разбиваются на секции и производятся вычисления каждой свертки посекционно, спектр каждой секции перемножается почленно со спектром опорной функции, над результатом перемножения проводится операция комплексного сопряжения и далее над этим выражением проводится операция преобразования функций и повторно берется комплексное сопряжение от результата операции преобразования функций для сжатия эхо-сигналов интерферометрических антенн и накопления результатов сжатия по обнаружению кромки ледового поля, его фрагментов, оценки скорости дрейфа, направления дрейфа, торосистости ледовой поверхности.
Отличительными признаками в предлагаемой радиолокационной системе обнаружения и высокоточного определения параметров морских ледовых полей является наличие блока управления РЛС, синтезатора частот, генератора М-кода, модулятора частотного диапазона 8,6 мм, модулятора частотного диапазона 3,2 см, СВЧ коммутатора, блока управления антенной системой, устройства временной автоматической регулировки усиления, коммутатора промежуточной частоты, усилителя промежуточной частоты, блока автоматической и ручной регулировки усиления, первого блока аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второго блока аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, блока первичной цифровой обработки, состоящего из двухпортового буферного оперативного запоминающего устройства и цифрового измерителя, причем двухпортовое буферное оперативное запоминающее устройство включает в себя процессор сжатия ФМн сигналов и обнаружитель, а цифровой измеритель состоит из счетчика дальности, процессора БПФ (быстрое преобразование Фурье), цифрового коррелятора интерферометра и собственно цифрового измерителя, при этом антенный блок включает в себя первую антенну приемно-передающую частотных диапазонов 3,2 см и 8,6 мм и разнесенную с ней по высоте вторую антенну приемную частотного диапазона 8,6 мм, причем блок управления РЛС соединен с СВЧ коммутатором, также соединен с синтезатором частот, с коммутатором промежуточной частоты, с устройством временной автоматической регулировки усиления, с блоком автоматической и ручной регулировки усиления, с двухпортовым буферным оперативным запоминающим устройством, с цифровым измерителем, а также двусторонней связью с блоком управления антенной системой, синтезатор частот соединен с генератором М-кода, с блоком управления РЛС, с модулятором частотного диапазона 8,6 мм и с модулятором частотного диапазона 3,2 см, с первым смесителем частоты, со вторым смесителем частоты, со вторым блоком фазовых детекторов, с фазовращателем, с первым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, вторым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму и с цифровым измерителем, при этом генератор М-кода соединен с модулятором частотного диапазона 8,6 мм и с модулятором частотного диапазона 3,2 см, модулятор частотного диапазона 8,6 мм соединен с усилителем мощности, модулятор частотного диапазона 3,2 см соединен с усилителем мощности, а первый усилитель мощности и второй усилитель мощности соединены с СВЧ коммутатором, причем СВЧ коммутатор соединен с блоком управления антенной системой, блок управления антенной системой соединен с первым усилителем высокой частоты, со вторым усилителем высокой частоты, с цифровым измерителем и двусторонней связью с первой антенной, а вторая антенна соединена с блоком управления антенной системой, причем первый усилитель высокой частоты соединен с первым смесителем частоты, второй усилитель высокой частоты соединен со вторым смесителем частоты, при этом первый смеситель частоты соединен с первым усилителем промежуточной частоты, второй смеситель частоты соединен со вторым усилителем промежуточной частоты, устройство временной автоматической регулировки усиления соединено с первым усилителем промежуточной частоты и со вторым усилителем промежуточной частоты, первый усилитель промежуточной частоты соединен с коммутатором промежуточной частоты, второй усилитель промежуточной частоты тоже соединен с коммутатором промежуточной частоты, а коммутатор промежуточной частоты соединен с усилителем промежуточной частоты, причем блок автоматической и ручной регулировки усиления соединен с усилителем промежуточной частоты, усилитель промежуточной частоты соединен с первым блоком фазовых детекторов, со вторым блоком фазовых детекторов и с блоком автоматической и ручной регулировки усиления, фазовращатель соединен с первым блоком фазовых детекторов, при этом первый блок фазовых детекторов соединен с первым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй блок фазовых детекторов соединен со вторым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, первый блок аналого-цифровох преобразователей квадратурных сигналов в цифровую форму соединен с двухпортовым буферным оперативным запоминающим устройством блока первичной цифровой обработки, и второй блок аналого-цифровых преобразователя квадратурных сигналов в цифровую форму тоже соединен с двухпортовым буферным оперативным запоминающим устройством блока первичной цифровой обработки, причем в блоке первичной цифровой обработки двухпортовое буферное оперативное запоминающее устройство соединено с цифровым измерителем, а цифровой измеритель обеспечивает направление сигнала на вторичную цифровую обработку.
Наибольший эффект при использовании изобретения достигается, в частности, в том случае, когда первоначально решается вопрос обнаружения опасных ледовых полей, задача сводится к обнаружению ледовой кромки, ЭПР (эффективная площадь рассеивания) которой существенно больше ЭПР квазигладкого ледового поля и ЭПР МП (морская поверхность). В предложенном техническом решении радиоизлучение производят из одной антенны с двух разнесенных антенн по высоте, а прием отраженных сигналов принимают двумя антеннами для обработки поступающих сигналов. Передаваемые радиолокационные сигналы из первой антенны и полученные в двух приемниках первой и второй антенн после отражения от поверхности и соответствующей обработки формируют интерферограмму, где фаза в каждом приемнике пропорциональна разности хода лучей Δ с коэффициентом пропорциональности k=2π/λ, где λ - длина волны. Интерферограмма в РЛС формируется умножением одного комплексного сигнала от каждого элемента разрешения на комплексно сопряженное второе изображение того же сюжета, но полученного другой антенной РЛС, то есть в так называемом режиме «жесткой» базы. В процессе обработки сигналов учитывается то, что важнейшими характеристиками ледовых образований, дрейфующих в открытом море, являются их координаты, размеры, скорость дрейфа и направление, которые должны оцениваться радиолокатором. При этом точностные характеристики РЛС зависят не только от энергетического потенциала, но и от разрешающей способностью по дальности и скорости, что также решается в предложенном техническом решении. При этом важнейшим параметром является продолжительность времени когерентного накопления, определяющая чувствительность радиолокационного измерителя к доплеровскому смещению частоты. Также отмечаются результаты измерений скорости дрейфа по направлению изменения дальности. Направление движения ледовых полей определяется при вторичной обработке с использованием информации кругового или селекторного сканирования. В нашем случае используется круговое сканирование - главный метод контроля ледовой обстановки в открытом морском пространстве. При вторичной обработке имеется возможность проводить обработку радиолокационных изображений для распознавания ледовых полей на фоне взволнованной МП, определения скорости и направления движения и общей ледовой обстановки. Эти характеристики являются важнейшими характеристиками ледовых образований, дрейфующих в открытом море: их координаты, размеры, скорость дрейфа и направление, которые должны оцениваться радиолокатором. При этом точностные характеристики РЛС зависят не только от энергетического потенциала, но и от разрешающей способностью по дальности и скорости. Особое внимание в предложении авторов следует обратить на то, что зеркальная антенна для обзорного радиолокатора анализа ледовой обстановки должна работать в частотных диапазонах 3,2 см и 8,6 мм. Достаточный для обеспечения энергетической чувствительности размер апертуры зеркала антенны может быть 150×64 (см). Диаграммы направленности антенны в обоих диапазонах волн должны быть, по возможности, одинаковыми в угломестной плоскости. Радиолокатор имеет две антенны, разнесенные по вертикали преимущественно на 7 м, нижняя антенна - приемо-передающая для обоих диапазонов, верхняя - приемная только для частотного диапазона 8,6 мм. Нижняя антенна для обеспечения наибольшей эффективности анализа ледовой обстановки установлена на высоте 25 м над уровнем моря. Желательно, чтобы антенны имели диаграмму направленности типа косеканс квадрат в угломестной (вертикальной) плоскости и быть остронаправленными в азимутальной. Косекансная диаграмма должна быть направлена к поверхности земли для равномерного освещения местности на дальностях от 1 до 20 км, что необходимо и достаточно для своевременного оповещения об опасных ледовых скоплениях и направлении их перемещения. Поляризация антенн горизонтальная, шумовая температура 300 К, полосы частот в обоих диапазонах по 200 МГц, сканирование по азимуту круговое. Мощность передатчика не более 15 Вт, длительность его импульса 6,14 мкс, период повторения 162 мкс. Антенна может быть однозеркальной или двухзеркальной в зависимости от возможности выполнения требований, предъявленных к ней. В простейшем варианте это однозеркальная антенна, профиль рефлектора антенны в азимутальной плоскости может быть параболическим, а в вертикальной для создания косекансной диаграммы направленности рефлектор должен иметь специальный профиль. Задача выбора профиля зеркала (или профилей двух зеркал) решается на втором этапе проектирования, а на первом необходимо найти амплитудно-фазовые распределения полей в апертуре антенны. В нашем случае минимальный размер апертуры для создания косекансной диаграммы направленности на волне 3,2 см оказывается равным 8 м. С рефлектором, имеющим меньший размер апертуры в вертикальной плоскости (например 64 см), создать такую диаграмму направленности для освещения местности под требуемыми малыми углами места не удастся. Для нашей радиолокационной системы необходимо, чтобы в пределах рабочих углов места зависимость от расстояний была монотонной, без нулей, а уровень освещения местности можно принять достаточным в крайних точках рабочей зоны. Вариант антенны с такой зависимостью можно получить в слегка расфазированной параболической антенне, края которой облучаются низким уровнем поля по сравнению с центральной областью. В азимутальной плоскости самая узкая диаграмма направленности может быть создана при равномерном по амплитуде и синфазном распределении поля в азимутальной плоскости апертуры антенны. В этой плоскости проще создать косинусоидальное распределение амплитуды поля по апертуре.
Сущность способа и устройства поясняется следующими графическими материалами.
На фиг.1 представлена функциональная радиолокационная схема обнаружения и высокоточного определения параметров морских ледовых полей;
На фиг.2 схематично представлен внешний вид блока антенной системы;
На фиг.3 схематично представлен структура цифрового процессора с постоянными параметрами "пинг/понг";
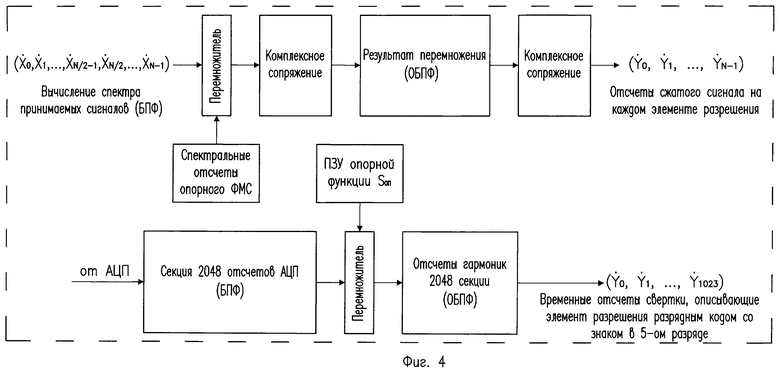
На фиг.4 схематично представлена блок-схема вычисления "быстрой" свертки.
Предложенный способ заключается в следующем.
В способе обнаружения и высокоточного определения параметров морских ледовых полей производят действия по обнаружению изменений радиоизлучениями двумя интерферометрическими антеннами на дистанции. Обнаружение изменений радиоизлучениями осуществляют на величину зондирующего сигнала. Радиоизлучения производят с одной из двух разнесенных по высоте антенн, а отраженные сигналы принимают двумя антеннами. Анализ изменений радиоизлучения производят по результатам, полученным с одной из двух разнесенных по высоте антенн. Отраженные сигналы разбиваются на секции. Производятся действия по обработке сигналов. Причем производятся вычисления каждой свертки посекционно. После чего спектр каждой секции перемножается почленно со спектром опорной функции. По окончании этого процесса над результатом перемножения проводится операция комплексного сопряжения. А над полученным выражением далее проводится операция преобразования функций посредством ОБПФ - обратного быстрого преобразования Фурье и затем повторно берется комплексное сопряжение от результата операции преобразования функций (ОБПФ). Для обнаружения кромки ледового поля, его фрагментов, оценки скорости дрейфа, направления дрейфа, торосистости ледовой поверхности осуществляется накопление результатов сжатия, после чего производят сжатие эхо-сигналов интерферометрических антенн. При этом обеспечивается создание мониторинга измерений. По завершению процесса при необходимости производят построение карт изменений.
В нашем случае полная линейка дальности 19 км записывается в двухпортовое буферное оперативное запоминающее устройство за 19000·6 нс = 114 мкс. Фазоманипулированные сигналы (ФМн) - эхо-сигналы сжимаются цифровым способом и производится накопление результатов сжатия с целью обнаружения кромки и фрагментов ледового поля, оценки скорости дрейфа, направления дрейфа, степени его торосистости. Для сжатия ФМн применен алгоритм быстрой свертки в частотной области, то есть секционная свертка в частотной области с накоплением. Использование так называемого алгоритма "быстрой" свертки обеспечивает увеличение надежности сжатия сигнала. Происходит перекрытие с накоплением, то есть используется так называемый «метод перекрытия с накоплением». Для этого отраженные сигналы со всей дистанции 19 км разбиваются на 19 секций и вычисляются свертки посекционно. Каждая секция содержит по 1023 дальномерных канала. Спектр каждой секции перемножается почленно со спектром опорной функции, над результатом перемножения проводится операция комплексного сопряжения и далее над этим выражением проводится ОБПФ и обратно берется комплексное сопряжение от результата ОБПФ. Опорной функцией для рассматриваемого случая является спектр последовательности. На фиг.4 приведен пример блок-схемы "быстрой" свертки для одной секции, где БПФ - быстрое преобразование Фурье; ОБПФ - обратное быстрое преобразование Фурье; АЦП - аналого-цифровой преобразователь; ПЗУ - постоянно запоминающее устройство; Soп - опорная функция. Для остальных - аналогично. Доплеровская чувствительность одного зондирующего ФМн импульса (длительностью 6,14 мкс) на уровне 168 кГц, а при максимальной скорости дрейфа 2 м/с реальное доплеровское смещение около 0,5 кГц, что пренебрежимо мало. Однако для увеличения надежности сжатия сигнала в ПЗУ спектров опорной функции будут записаны 4 вариантов спектров, учитывающих это смещение (с шагом 0,5 кГц). Это позволит почти идеально адаптировать систему сжатия.
Существует множество способов ускорения вычисления БПФ. В нашем случае выбрана простая и весьма эффективная вычислительная структура "пинг/понг" с постоянными параметрами. Эта структура схематично представлена в соответствии с фиг.3, где ОЗУ - оперативно-запоминающее устройство; Wnk - весовая оценка; Fтакт - тактовая частота. Она отображает структуру цифрового процессора с постоянными параметрами "пинг/понг". Работа схемы по этапам представлена в таблице.
Запись результатов II этапа
Запись результатов IV этапа
Запись результатов Х этапа и выдача его
Запись результатов I этапа
Запись результатов III этапа
Вычисление результата Х этапа
Как правило, подобные устройства проектируются на основе программируемых логических схем очень большой степени интеграции ПЛИС - программируемых логических интегральных схем, что позволяет достигать высокой производительности, так как все операции решаются аппаратным путем, а не программным. Кроме того, им свойственна высокая степень адаптивности. Отсчеты сжатых ФМн сигналов квадратурно накапливаются и объединяются для решения задачи обнаружения кромки ледового поля. Одновременно когерентно накопленные отсчеты сжатых ФМн сигналов используются для анализа доплеровского спектра в каждом элементе дальности (после срабатывания обнаружителя), позволяющего оценить скорость дрейфа ледового поля. Записанные в ОЗУ все когерентные периоды зондирования стабильно сохраняют свои свойства и проявляют результаты когерентного наблюдения при их оптимальной обработке вне зависимости от темпа и времени обработки. Это свойство используется при организации и проведения системы обработки. При этом время, затрачиваемое на алгоритм БПФ, может быть уменьшено в 16 раз за счет перехода к БПФ по основанию 4.
Функциональная радиолокационная схема обнаружения и высокоточного определения параметров морских ледовых полей представлена на фиг.1 и состоит из блока 1 управления РЛС (Управление РЛС), синтезатора 2 частот (Синтезатор частот), генератора 3 М-кода (Генератор М-кода), модулятора 4 частотного диапазона 8,6 мм (МОД1), модулятора 5 частотного диапазона 3,2 см (МОД2), первого усилителя 6 мощности (У1), второго усилителя 7 мощности (У2), СВЧ коммутатора 8 (СВЧ коммутатор), блока 9 управления антенной системой (Управление антенной системой), блока 10 антенной системы с антенно-фидерным трактом (Антенная система и АФТ). Причем блок 10 включает в себя первую антенну 11 (А1 прм-прд) 3,2 см; 8,6 мм и вторую антенну 12 (А2 прм) 8,6 мм. Также радиолокационная схема обнаружения и высокоточного определения параметров морских ледовых полей состоит из первого усилителя 13 высокой частоты (УВЧ1), второго усилителя 14 высокой частоты (УВЧ2), первого смесителя 15 частоты (СМ1), второго смесителя 16 частоты (СМ2), устройства 17 временной автоматической регулировки усиления (Временное АРУ), первого усилителя 18 промежуточной частоты (УПЧ1), второго усилителя 19 промежуточной частоты (УПЧ2), коммутатора 20 промежуточной частоты (ПЧ коммутатор), усилителя 21 промежуточной частоты (УПЧ), блока 22 автоматической и ручной регулировки усиления (Блок АРУ и РРУ), первого блока фазовых детекторов 23 (БФД1), второго блока фазовых детекторов 24 (БФД2), фазовращателя 25 (ФВ), первого блока 26 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму (БАЦП1), второго блока 27 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму (БАЦП2), блока 28 первичной цифровой обработки (Блок первичной цифровой обработки). Блок 28 первичной цифровой обработки состоит из двухпортового буферного оперативного запоминающего устройства 29 (Двухпортовое БОЗУ) и цифрового измерителя 30 (Цифровой измеритель). Двухпортовое буферное оперативного запоминающего устройства 29 включает в себя процессор сжатия ФМн сигналов и обнаружитель. Цифровой измеритель 30 состоит из счетчика дальности, процессора БПФ, цифровой коррелятор интерферометра и собственно цифрового измерителя. На фиг.2 схематично представлен внешний вид блока 10 антенной системы. Блок 10 включает в себя первую антенну 11 и вторую антенну 12, размещенные на вращающейся опоре 31 основания 32. На фиг.2 антенны 11 и 12 соединены с соответствующим волноводом (на фиг. не показаны). Во вращающейся опоре 31 выполнены волноводно-коаксиальные переходы (на фиг. не показаны). Первая антенна 11 и вторая антенна 12 представляют собой две разнесенные по высоте антенны, которые могут быть зеркальными. Нижняя антенна 11 работает в приемо-передающем режиме. Верхняя антенна 12 - в приемном.
В функциональной радиолокационной схеме обнаружения и высокоточного определения параметров морских ледовых полей блок 1 управления РЛС формирует все служебные команды, выбор адресов в ОЗУ при записи и считывании, необходимые сигналы управления. Синтезатор 2 частот формирует гармонические сигналы двух диапазонов f1=9,372 ГГц (λ=3,2 мм) и f2=34,88 ГГц (λ=8,6 мм); тактовые импульсы FT для регистра сдвига генератора М-кода; гетеродинные частоты fz1 и fz2 для первого и второго 15, 16 смесителей СМ1 и СМ2; сигнал опорной частоты для первого и второго блоков фазовых детекторов 23, 24 БФД1 и БФД2 (второй блок фазовых детекторов 24 БФД2 питается опорной частотой напрямую, первый блок фазовых детекторов 23 БФД1 - через фазовращатель 90°); тактовую частоту 167 МГц поступающая на АЦП квадратурных каналов схемы обработки (выбрана из условия - один отсчет с каждого элемента дальности) и ряд служебных частот для работы блока управления РЛС. Генератор 3 М-кода предназначен для формирования М-псевдослучайной последовательности из 1023 дискретов по 6 нс каждый и состоит из регистра сдвига и сумматоров по модулю в цепи обратной связи регистра, которая выбирается с учетом порождающего характеристического многочлена для достижения минимального уровня боковых лепестков автокорреляционной функции (АКФ). Модулятор 4 частотного диапазона 8,6 мм (МОД1) и модулятор 5 частотного диапазона 3,2 см (МОД2) предназначены для манипуляции фазы на «0», «π» обеих сформированных в синтезаторе частотных диапазонов 8,6 мм и 3,2 см и реализуется на управляемых М-кодом P-I-N переключателях. Первый усилитель 6 мощности и второй усилитель 7 мощности усиливает сформированные в каждом частотном канале сигналы до пиковой мощности, которая может быть равна 10 Вт. СВЧ коммутатор 8 переключает сигналы обоих диапазонов 8,6 мм и 3,2 см по команде от блока 1 управления РЛС. При этом в качестве основного рабочего режима РЛС принят диапазон на длине волны 8,6 мм. Переключение режима работы РЛС на частотный диапазон 3,2 см используется в основном в случае плохих погодных условий, вызывающих сильные потери в ММ диапазоне ЭМВ при распространении сигнала на трассе. Блок 9 управления антенной системой предназначен для коммутации режимов излучения и приема сигналов с подключением антенной системы соответственно к трактам передатчика и приемника, для включения радиоинтерферометрического режима работы по команде с блока 1 управления РЛС, для управления режимом азимутального сканирования антенной системы, для выдачи сигналов начала и окончания азимутального обзора в круговом и секторном режимах, для выдачи информации о текущем азимутальном направлении. Блок 10 антенной системы с антенно-фидерным трактом состоит из двух антенн: первой антенны 11 и второй антенны 12, разделенных вертикальной антенной базой, причем первая антенна 11 используется как передающая и приемная для частот обоих диапазонов (отличие только в конструкции облучателей), а вторая антенна 12 используется только как приемная антенна при работе РЛС в радиоинтерферометрическом режиме при анализе характеристик рельефа ледовых поверхностей. Радиолокационные сигналы, передаваемые из первой антенны 11 и полученные в двух приемниках после отражения от поверхности и соответствующей обработки, формируют интерферограмму. Антенно-фидерный тракт блока 10 предназначен для согласования антенн с СВЧ трактами передачи и приема. Первый усилитель 13 высокой частоты (УВЧ1) выполнен двухканальным, то есть представлен двумя усилителями высокой частоты с идентичными характеристиками, каждый из которых настроен на f2=34,88 ГГц (λ=8,6 мм). Второй усилитель 14 высокой частоты (УВЧ2) настроен на f1=9,372 ГГц (λ=3,2 см) соответственно, но с одинаковой шириной полосы частот порядка 200…220 МГц и фактором шума входных цепей ПРМ Fш=3. Первый смеситель 15 частоты (СМ1) и второй смеситель 16 частоты (СМ2) выполнены по балансной схеме и предназначены для переноса отраженных сигналов на промежуточную частоту, одинаковую для обоих каналов fпч=850 МГц. Устройство 17 временной автоматической регулировки усиления (Временное АРУ) предназначено для обеспечения уменьшения усиления для сигналов большой мощности, отраженных или рассеянных в ближней зоне для того, чтобы сигналы не выходили за динамический диапазон приемника РЛС. Первый усилитель 18 промежуточной частоты (УПЧ1) и второй усилитель 19 промежуточной частоты (УПЧ2) предназначены для селекции отраженных сигналов в полосе 170 МГц от шумов и помех. Коммутатор 20 промежуточной частоты предназначен для переключения каналов 8,6 мм и 3,2 см. Усилитель 21 промежуточной частоты предназначен для усиления сигналов промежуточной частоты. Блок 22 (Блок АРУ и РРУ) предназначен для автоматической и ручной регулировки усиления. Первый блок фазовых детекторов 23 (БФД1) и второй фазовый детектор 24 (БФД2) обеспечивают поступление через буферный УПЧ отраженных сигналов на промежуточной частоте в соответствии с выбранным диапазоном и командой из блока 1 управления РЛС на другой вход фазовых детекторов 23 и 24, причем каждый блок фазовых детекторов 23 и 24 состоит из двух фазовых детекторов. Один для канала 8,6 мм и отдельно другой для канала 3,2 см. Фазовращатель 25 обеспечивает сдвиг на 90° для опорной частоты, что, в свою очередь, позволяет выделить в БФД1 и в БФД2 два квадратурных канала. Первый блок 26 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму и второй блок 27 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму предназначены для преобразования квадратурных сигналов в цифровую форму, причем каждый блок 26 и 27 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму состоит из двух блоков аналого-цифровых преобразователей квадратурных сигналов в цифровую форму - один для канала 8,6 мм и другой отдельно для канала 3,2 см. Разрядность АЦП определена исходя из динамического диапазона отраженных сигналов порядка 24 дБ и с учетом знакового разряда по каналам действительной и мнимой части составляет - Re nацп=4+1; Im nацп=4+1. Цифровые отсчеты поступают на цифровой процессор с периодом тактовой частоты оцифровки Δtацп=6 нс. В радиоинтерферометрическом режиме работы РЛС на частоте f2=34,88 ГГц (λ=8,6 мм) используются идентичные параллельные приемные каналы от антенн А1 и А2 по СВЧ и ПЧ трактам, по фазовому детектированию и оцифровке в АЦП. Блок 28 первичной цифровой обработки состоит из двухпортового буферного оперативного запоминающего устройства 29 (Двухпортовое БОЗУ) и цифрового измерителя 30. Двухпортовое базовое запоминающее устройство 29 выполнено в виде процессора цифрового сжатия комплексной огибающей ФМн сигнала, сумматора-накопителя с цифровым компаратором (обнаружитель), который содержит промежуточные ОЗУ-Re (действительной частоты), ОЗУ-Im (мнимой частоты), счетчик дальности, цифровой коррелятор и блоки БПФ (анализ доплеровского спектра для оценки радиальной скорости). При этом темп поступления отсчетов АЦП достаточно высок, поэтому запоминающее устройство, куда поступают эти отсчеты, выполняет роль буфера-преобразователя временного масштаба. Так как запись и считывание отсчетов в БОЗУ происходит одновременно, но с разными темпами и по разным адресам, то это устройство является двухпортовой памятью с общей емкостью М=128к×2nацп слов. Цифровой измеритель 30 состоит из счетчика дальности, процессора БПФ, цифрового коррелятора интерферометра и собственно цифрового измерителя. Связи в функциональной радиолокационной схеме обнаружения и высокоточного определения параметров морских ледовых полей представлены следующим образом. Блок 1 управления РЛС соединен с СВЧ коммутатором 8, также соединен с синтезатором 2 частот, с коммутатором 20 промежуточной частоты, с устройством 17 временной автоматической регулировки усиления, с блоком 22 автоматической и ручной регулировки усиления, с двухпортовым буферным оперативным запоминающим устройством 29, с цифровым измерителем 30, а также двусторонней связью с блоком 9 управления антенной системой. Синтезатор 2 частот соединен с генератором 3 М-кода, с блоком 1 управления РЛС, с модулятором 4 частотного диапазона 8,6 мм и с модулятором 5 частотного диапазона 3,2 см, с первым смесителем 15 частоты, со вторым смесителем 16 частоты, со вторым блоком 24 фазовых детекторов, с фазовращателем 25, с первым блоком 26 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, со вторым блоком 27 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму и с цифровым измерителем 30. Генератор 3 М-кода соединен с модулятором 4 частотного диапазона 8,6 мм и с модулятором 5 частотного диапазона 3,2 см. Модулятор 4 частотного диапазона 8,6 мм соединен с усилителем 6 мощности. Модулятор 5 частотного диапазона 3,2 см соединен с усилителем 7 мощности. Первый усилитель 6 мощности и второй усилитель 7 мощности соединены с СВЧ коммутатором 8. СВЧ коммутатор 8 соединен с блоком 9 управления антенной системой. Блок 9 управления антенной системой соединен с усилителем 13 высокой частоты, со вторым усилителем 14 высокой частоты, с цифровым измерителем 30 и двусторонней связью с первой антенной 11. Вторая антенна 12 соединена с блоком 9 управления антенной системой. Первый усилитель 13 высокой частоты соединен с первым смесителем 15 частоты. Второй усилитель 14 высокой частоты соединен со вторым смесителем 16 частоты. Первый смеситель 15 частоты соединен с первым усилителем 18 промежуточной частоты. Второй смеситель 16 частоты соединен со вторым усилителем 19 промежуточной частоты. Временное АРУ 17 соединено с первыми усилителями 18 промежуточной частоты и со вторым усилителем 19 промежуточной частоты. Первый усилитель 18 промежуточной частоты соединен с коммутатором 20 промежуточной частоты. Второй усилитель 19 промежуточной частоты тоже соединен с коммутатором 20 промежуточной частоты. Коммутатор 20 промежуточной частоты соединен с усилителем 21 промежуточной частоты. Блок 22 автоматической и ручной регулировки усиления соединен с усилителем 21 промежуточной частоты. Усилитель 21 промежуточной частоты соединен с первым блоком 23 фазовых детекторов и со вторым блоком 24 фазовых детекторов и с блоком 22 автоматической и ручной регулировки усиления. Фазовращатель 25 соединен с первым блоком 23 фазовых детекторов. Первый блок 23 фазовых детекторов соединен с первым блоком 26 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму. Второй блок 24 фазовых детекторов соединен с вторым блоком 27 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму. Первый блок 26 аналого-цифровох преобразователей квадратурных сигналов в цифровую форму соединен с двухпортовым буферным оперативным запоминающим устройством 29 блока 28 первичной цифровой обработки. Второй блок 27 аналого-цифровых преобразователя квадратурных сигналов в цифровую форму тоже соединен с двухпортовым буферным оперативным запоминающим устройством 29 блока 28 первичной цифровой обработки. В блоке 28 первичной цифровой обработки двухпортовое буферное оперативное запоминающее устройство 29 соединено с цифровым измерителем 30. Цифровой измеритель 30 обеспечивает направление сигнала на вторичную цифровую обработку.
Работа РЛС контроля ледовой обстановки может быть описана следующим образом.
Антенны 11 и 12 вращаются на опоре 31 основания 32. Нижняя антенна 11 работает в приемо-передающем режиме. Верхняя антенна 12 - в приемном. В синтезаторе частот 2 при запуске в нем задающего генератора формируются все необходимые для функционирования схемы частоты. При этом на генератор 3 М-кода направляется кодовая последовательность для двух модуляторов 4 и 5 с 6 нс (наносекундами). Далее сигнал усиливается на усилителях 6 и 7 через усиливающий тракт до управления антенной системой 9. Затем в антенной системе 10 принимается сигнал передающей первой антенной 11 (А1). Причем далее с первой антенны 11 передаются сигналы обоих частот диапазонов 8,6 мм и 3,2 см. Ее работа в приемо-передающем режиме происходит в диапазоне частот 3,2 см. Она работает на обнаружение кромки льда. Работа РЛС в миллиметровом диапазоне обеспечивает точность измерений. От нее не всегда следует ожидать своевременного указание на приближение к месту размещения РЛС кромки льда, поскольку на эти результаты значительное влияние могут оказывать метели и дождь. Для осуществления замеров толщины ледовой кромки, шероховатости льда, то есть его торосов, подключается к работе миллиметровый диапазон антенны 11 и замеры этих показателей осуществляются при помощи двух антенн, то есть в сантиметровом режиме обнаруживаем кромку льда, а в миллиметровом не только обнаруживаем, но и замеряем шероховатость льда, толщину ледовой кромки. При поступлении сигнала он усиливается: первым усилителем 13 высокой частоты, первым смесителем 15 частоты, вторым усилителем 14 высокой частоты, вторым смесителем 16 частоты, первым усилителем 18 промежуточной частоты, вторым усилителем 19 промежуточной частоты. Первый усилитель 18 промежуточной частоты соединен с коммутатором 20 промежуточной частоты. Коммутатор 20 промежуточной частоты переключает каналы 8,6 мм и 3,2 см. После чего усилитель 21 промежуточной частоты усиливает сигнал промежуточной частоты, а блок 22 обеспечивает автоматическую и ручную регулировку усиления. Поступление через буферный УПЧ отраженных сигналов на промежуточной частоте в соответствии с выбранным диапазоном и командой из блока 1 управления РЛС на другой вход фазовых детекторов обеспечивают блоки фазовых детекторов 23 и 24. Фазовращатель 25 сдвигает на 90° опорную частоту и за счет этого обеспечивается выделение в БФД1 и в БФД2 два квадратурных канала. Первый блок 26 и второй блок 27 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму преобразовывают квадратурные сигналы в цифровую форму, которые поступают в двухпортовое буферное оперативное запоминающее устройство 29 (Двухпортовое БОЗУ). В радиоинтерферометрическом режиме работы РЛС на частоте f2=34,88 ГГц (λ=8,6 мм) от антенн 11 и 12 по СВЧ и ПЧ трактам, по фазовому детектированию и оцифровке в АЦП используют идентичные параллельные приемные каналы. Запись и считывание отсчетов в двухпортовом БОЗУ происходит одновременно, но с разными темпами и по разным адресам. Цифровой измеритель 30 состоит из счетчика дальности, процессора БПФ, цифрового коррелятора интерферометра и собственно цифрового измерителя.
Все используемые блоки являются известными либо могут быть получены из известных устройств путем их объединения известными методами.
В примере исполнения радиолокационной схемы обнаружения и высокоточного определения параметров морских ледовых полей блок 1 управления РЛС (Управление РЛС) может быть представлен в виде указанного на стр.604-606 и стр.866-869 блока по книге Дж.Ф.Уейнерли. Проектирование цифровых устройств, том.2, М.: Постмаркет, 2002. Синтезатор 2 частот (Синтезатор частот) может быть представлен в виде указанного на с.55-122 книги Белова Л.А. Формирование стабильных частот и сигналов. - М.: Академия, 2005 г. Генератор 3 М-кода (Генератор М-кода) может быть представлен в виде генератора, указанного на с.53-54 учебного пособия авторов Баскакова А.И., Лукашенко Ю.И., Щернакова Л.А. Зондирующие радиолокационные сигналы. - М.: Издательство МЭИ, 1990 г. Модулятор 4 частотного диапазона 8,6 мм (МОД1) и модулятор 5 частотного диапазона 3,2 см (МОД2) могут быть представлены в виде модуляторов, указанных на с.53-54 учебного пособия авторов Баскакова А.И., Лукашенко Ю.И., Щернакова Л.А. Зондирующие радиолокационные сигналы. - М.: Издательство МЭИ, 1990 г. Первый усилитель 6 мощности (У1) и второй усилитель 7 мощности (У2) могут быть представлены в виде усилителей мощности, представленного в «Справочнике по радиолокации» Под редакцией М.Скольника, том 3., 1970 год, М.: Советское радио, стр.58-63. Там же на стр.42-49 описан СВЧ коммутатор, который может быть использован как СВЧ коммутатор 8 предложенного устройства. В этом же справочнике на стр.21-48 описано управление антенной системой, по которой может быть изготовлен блок 9. На стр.114-118 тома 1 указанного справочника описан антенный блок, который может быть применен блок 10 антенной системы с антенно-фидерным трактом в схеме авторов, включающем в себя первую антенну 11 и вторую антенну 12. Первая антенна 11 и вторая антенна 12 представляют собой две разнесенные по высоте антенны, которые могут быть зеркальными. Верхняя приемная антенна 12 работает только в диапазоне 8,6 мм и может иметь волновод длиной 7 м сечением 7,2×3,4 мм. Также схема обнаружения и высокоточного определения параметров морских ледовых полей состоит из первого усилителя 13 высокой частоты, второго усилителя 14 высокой частоты, первого смесителя 15 частоты, второго смесителя 16 частоты, первого усилителя 18 промежуточной частоты, второго усилителя 19 промежуточной частоты, которые могут быть изготовлены по «Справочнику по радиолокации» под редакцией М.Скольника, том 3., 1970 год, М.: Советское радио, стр.135-147. В этом же справочнике на стр.156-162 описано устройство 17 временной автоматической регулировки усиления и блок 22 автоматической и ручной регулировки усиления. Первый блок фазовых детекторов 23 и второй блок фазовых детекторов 24 представлены в работе авторов Моругин Л.А., Глебович Г.В. Наносекундная импульсная техника, Сов. радио, 1964, а также в Справочнике по АИП и схемам фирмы «ANALOG DEVICES (стр.110-AD9410), 1999 г. Акиншин Н.С. и др. Развитие радиоэлектронной техники р.л. систем - Зарубежная радиоэлектроника, 2005, №10, с.24-58. Фазовращатель 25 и первый блок 26 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму и второй блок 27 аналого-цифровых преобразователей квадратурных сигналов в цифровую форму могут быть представлены в исполнении, указанном на стр.36-40 статьи Быстрова Р.П. и др. сборника «Функциональные устройства и элементная база радиотехнических устройств» - «Вооружение. Политика. Конверсия.», 2004, №6. Из «Теории применения и цифровой обработки сигналов», издательства «Мир», 1978 г. следует почерпнуть выполнение блока 28 первичной цифровой обработки, состоящего из цифрового измерителя 30 и двухпортового буферного оперативного запоминающего устройства 29, который включает в себя процессор сжатия ФМн сигналов и обнаружитель. В нашем случае запись и считывание отсчетов в двухпортовом БОЗУ происходит одновременно, но с разными темпами и по разным адресам. Цифровой измеритель 30, также описанный в упомянутом источнике, состоит из счетчика дальности, процессора БПФ, цифрового коррелятора интерферометра и собственно цифрового измерителя. Необходимо отметить, что в описываемом примере исполнения предложенного технического решения зеркальная антенна для обзорного радиолокатора анализа ледовой обстановки должна работать на волнах 3,2 см и 8,6 мм. Достаточный для обеспечения энергетической чувствительности размер апертуры зеркала антенны - 150×64 (см). Диаграммы направленности антенны в обоих диапазонах волн должны быть, по возможности, одинаковыми в угломестной плоскости. Радиолокатор имеет две антенны, разнесенные по вертикали на 7 м, причем нижняя антенна - приемо-передающая для обоих диапазонов, верхняя - приемная только для диапазона 8,6 мм. Нижнюю антенну устанавливают на высоте 25 м над уровнем моря. Желательно, чтобы антенны имели диаграмму направленности типа косеканс квадрат в угломестной, или иначе говоря, к вертикальной плоскости, и быть остронаправленными в азимутальной. Косекансная диаграмма должна быть направлена к поверхности земли для равномерного освещения местности на дальностях от 1 до 20 км. Поляризация антенн горизонтальная, шумовая температура 300 К, полосы частот в обоих диапазонах по 200 МГц, сканирование по азимуту круговое. Мощность передатчика не более 15 Вт, длительность его импульса 6,14 мкс, период повторения 162 мкс. Антенна может быть однозеркальной или двухзеркальной в зависимости от возможности выполнения требований, предъявленных к ней. В простейшем варианте это однозеркальная антенна, профиль рефлектора антенны в азимутальной плоскости может быть параболическим, а в вертикальной для создания косекансной диаграммы направленности рефлектор должен иметь специальный профиль. Для уменьшения влияния внешних метеоусловий волноводы и рупор загерметизированы и снабжены стандартной системой дегидрации, закачивающей в волноводы и рупор сухой воздух под небольшим давлением, порядка 2 кПа. Для обеспечения надежной работы РЛС работающей в диапазоне СМ и ММ радиоволн от 10 до 100 ГГц используются частоты ≈ 10 ГГц (λ=3 см) и ≈ 35 ГГц (λ=8,6 мм). При этом согласно экспериментальным данным минимальное суммарное ослабление радиолокационного сигнала при прохождении трассы длиной 20 км с учетом осадков зимой (осадки в виде сухого снега) составляют на λ=3 см - 0,42 дБ, а на Δ=8,6 мм - 2,3 дБ, а максимальное ослабление летом при осадках интенсивностью не более 10 мм/час составит не более 8 дБ на λ=3 см и может достигать значений 92 дБ на λ=8,6 мм с вероятностью наблюдения максимальных затуханий 0,13% от времени наблюдений. Дополнительно можно сказать о том, что осадки не только ослабляют сигнал РЛС на пути к ледовому полю и обратно, но и приводят к его рассеянию, при этом рассеянное в обратном направлении на РЛС поле является помехой по отношению к информационному сигналу, отраженному ото льда, что учтено в предложенном техническом решении. Кроме того, в примере исполнения определена величина удельной эффективной площади рассеивания для дождя интенсивностью от 1 мм/час до 100 мм/час. Но в любом случае эта величина для λ=3,2 см не превышает 9,6·10-5 [1/м], а для λ=8,6 мм не превышает 7·10-4 [1/м]. При определении объемной эффективной площади рассеивания необходимо оценить объем элемента разрешения РЛС для текущей дальности. Информация об удельных эффективных площадях рассеивания тумана и снега отсутствует, однако по косвенным данным, обратным рассеянием в тумане и в сухом снеге можно пренебречь. Эффективную площадь рассеивания для мокрого снега можно оценить по характеристикам дождя аналогичной интенсивности. Об особенностях морского льда следует сообщить следующее. Морской лед представляет собой весьма динамичную среду. Имеется много видов льда с различной историей роста. При росте и разрушении льда условия на его поверхности и в толще постоянно изменяются, что предопределяет разнообразие форм шероховатости, рельефа и внутренней структуры. Существенный вклад в это разнообразие вносят пространственно-временные вариации толщины и состояния снежного покрова. Обнаружение айсбергов с определенной площадью геометрического сечения в направлении РЛС дает разброс по дистанции в 1,3…2,4 раза при одинаковой их площади сечения и разброс по площади сечения в 2…5 раз при одинаковой дистанции. В северных широтах крупные айсберги имеют в поперечнике не более 200 м и возвышаются над уровнем моря на 15…20 м. Скорость дрейфа крупных льдин и айсбергов составляет до 2% скорости ветра, а направление движения может отклоняться от направления ветра из-за вращения Земли. По экспериментальным данным удельная эффективная площадь рассеивания льда лежит в пределах 0,05…1,2. В примере исполнения для упрощения технической реализации на используемых диапазонах длин волн в 3,2 см и 8,6 мм выбираем зондирующий псевдошумовой сигнал с манипуляцией фазы на "0" и "π", управляемой М-кодом: длительность одного дискрета в коде 6,0 нс, количество дискретов 1023, так что длительность зондирующего импульса составила 6,14 мкс, период повторения 162 мкс (определяется однозначностью оценки дальности на дистанции 20 км), время когерентного накопления 20,7 мс. Выбор такого сигнала позволяет обеспечить разрешающую способность по дальности порядка 90 см, по скорости 0,2 м/с (при работе на длине волны 8,6 мм) и 0,78 м/с (на длине волны 3,2 см). Кроме того, необходимый запас по энергетике, достаточный для надежного обнаружения ледовых кромок и торосов на дальности до 20 км при импульсной мощности передатчика Рпрд1=Pпрд2=10 вт (как для длины волны λ=3,2 см, так и для длины волны λ=0,86 см), а при выбранном зондирующем сигнале и организации интерферометрического режима работы РЛС возможность оценивать характеристики рельефа ледовых полей с точностью 5 см может быть реализована при работе на длине волны 8,6 мм и антенной базе порядка 7 м следует отметить, что зеркальная антенна для обзорного радиолокатора анализа ледовой обстановки должна работать на волнах 3,2 см и 8,6 мм. При этом достаточный для обеспечения энергетической чувствительности размер апертуры зеркала антенны - 150×64 (см). Размеры антенны выбраны одинаковыми для обеих длин волн, конструктивно отличаются только облучатели. Две зеркальные антенны, разнесенные по высоте на 7 м, устанавливают на вращающейся по азимуту опоре. Нижняя антенна размещена на высоте 25 м над уровнем моря и работает в приемно-передающем режиме для обоих диапазонов, и, как было отмечено ранее, верхняя - в приемном только для диапазона 8,6 мм.
Таким образом, предложенное техническое решение позволит определить возникновение в заданном радиусе кромки льда, приближение кромки льда к объекту, обеспечить бесконтактное измерение толщины опасных ледяных образований с большой толщиной льда более 50 см и с высокой точностью. Кроме того, может быть определена скорость движения дрейфующих полей и крупногабаритного льда по направлению к морским добывающим платформам. Также данное техническое решение позволит обеспечить создание высокоэффективной радиолокационной системы оценки ледовой обстановки и предупреждения о приближении опасных объектов, таких как айсберги, обширные ледовые поля, торосы, крупные льдины с возможностью определения координат, направления движения, скорости. В процессе работы определяются размеры ледового поля, то есть его величина. В частности, устройство обеспечивает создание радиолокационной техники, предназначенной для высокоточной оценки ледовой обстановки в районах морской добычи и транспортировки нефтегазовых ресурсов. При этом обеспечивается дальность действия РЛС в заданных параметрах, обеспечивается возможность измерения обломков дрейфующих ледовых полей и крупнобитого льда с большой высотой паруса тороса с высокой точностью, расстояния между грядами торосов также с высокой точностью. Кроме того, обеспечивается бесконтактное измерение льда большей толщины и толщины опасных ледяных образований.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2017 |
|
RU2660752C1 |
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2019 |
|
RU2710030C1 |
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2019 |
|
RU2723437C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| МОНОИМПУЛЬСНАЯ РЛС МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2015 |
|
RU2600109C1 |
| Моноимпульсный пеленгатор с комбинированным антенным устройством | 2015 |
|
RU2624008C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| Радиолокационная станция | 2015 |
|
RU2609144C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2256939C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |


Изобретение относится к информационно-измерительной системе и может быть использовано в радиолокационной технике для высокоточной оценки ледовой обстановки в районах морской добычи и транспортировки нефтегазовых ресурсов. Достигаемым техническим результатом изобретения является обеспечение высокоточной оценки ледовой обстановки и предупреждения о приближении опасных объектов. Способ заключается в том, что радиоизлучение производят с одной из двух разнесенных по высоте интерферометрических антенн, отраженные сигналы принимают, двумя антеннами и при приеме отраженные сигналы разбиваются на секции и производятся вычисления каждой свертки посекционно. Радиолокационная система включает в себя определенным образом соединенные между собой блок антенной системы из двух антенн, усилители мощности, усилители высокой частоты, усилители промежуточной частоты, смесители, фазовые детекторы, фазовращатель, блок управления РЛС, синтезатор частот и другие элементы, которые обеспечивают определение образования в заданном радиусе кромки льда, приближение ее к объекту, измерение толщины опасных ледяных образований, определение скорости, направления, движения дрейфующих полей и могут предоставить высокоточную оценку ледовой обстановки. 2 н.п. ф-лы, 4 ил., 1 табл.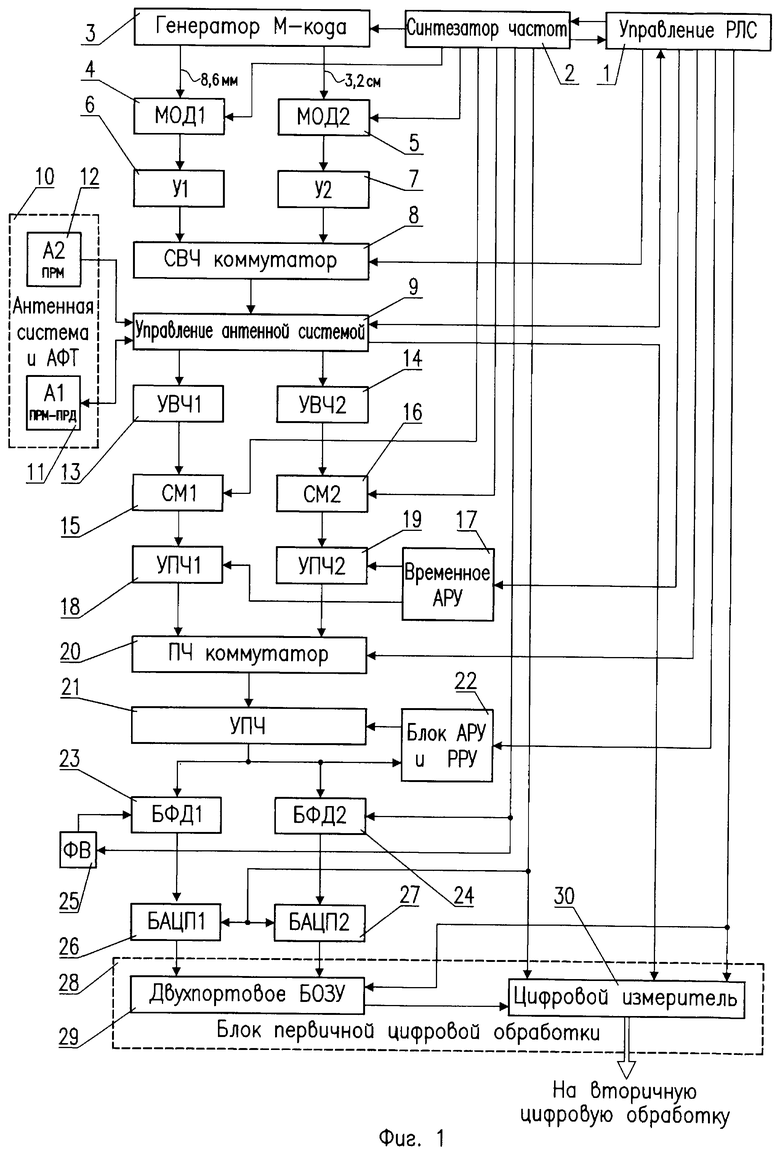
1. Способ обнаружения и высокоточного определения параметров морских ледовых полей, включающий действия на дистанции по обнаружению изменений параметров отраженных сигналов двумя интерферометрическими антеннами, созданию мониторинга измерений, построению карт изменений, анализу изменений, отличающийся тем, что радиоизлучение производят с одной из двух разнесенных по высоте антенн, отраженные сигналы принимают двумя антеннами, при этом временные отсчеты отраженных сигналов разбиваются на секции и для сжатия фазоманипулированных отраженных сигналов производятся линейные свертки между отсчетами секций и отсчетами опорных функций определяющих доплеровское смещение принимаемых сигналов посекционно для эхо-сигналов интерферометрических антенн, накопления результатов сжатия и по ним обнаружения кромки ледового поля, его фрагментов, оценки скорости дрейфа и разности фаз отраженных сигналов, приходящих на две интерферометрические антенны.
2. Радиолокационная система обнаружения и высокоточного определения параметров морских ледовых полей, которая включает в себя блок антенной системы из двух антенн, усилители мощности, усилители высокой частоты, усилители промежуточной частоты, смесители, фазовые детекторы и фазовращатель, отличающаяся тем, что она снабжена блоком управления РЛС, синтезатором частот, генератором М-кода, модулятором частотного диапазона 8,6 мм, модулятором частотного диапазона 3,2 см, СВЧ коммутатором, блоком управления антенной системой, устройством временной автоматической регулировки усиления, коммутатором промежуточной частоты, усилителем промежуточной частоты, блоком автоматической и ручной регулировки усиления, первым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, вторым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, блоком первичной цифровой обработки, состоящим из двухпортового буферного оперативного запоминающего устройства и цифрового измерителя, причем двухпортовое буферное оперативное запоминающее устройство включает в себя процессор сжатия фазоманипулированных сигналов и обнаружитель, при этом антенный блок включает в себя первую антенну приемно-передающую частотных диапазонов 3,2 см и 8,6 мм и разнесенную с ней по высоте вторую антенну приемную частотного диапазона 8,6 мм, причем блок управления РЛС соединен с СВЧ коммутатором, также соединен с синтезатором частот, с коммутатором промежуточной частоты, с устройством временной автоматической регулировки усиления, с блоком автоматической и ручной регулировки усиления, с двухпортовым буферным оперативным запоминающим устройством, с цифровым измерителем, а также двусторонней связью с блоком управления антенной системой, синтезатор частот соединен с генератором М-кода, с блоком управления РЛС, с модулятором частотного диапазона 8,6 мм и с модулятором частотного диапазона 3,2 см, с первым смесителем частоты, со вторым смесителем частоты, со вторым блоком фазовых детекторов, с фазовращателем, с первым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, со вторым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму и с цифровым измерителем, при этом генератор М-кода соединен с модулятором частотного диапазона 8,6 мм и с модулятором частотного диапазона 3,2 см, модулятор частотного диапазона 8,6 мм соединен с первым усилителем мощности, модулятор частотного диапазона 3,2 см соединен со вторым усилителем мощности, а первый усилитель мощности и второй усилитель мощности соединены с СВЧ коммутатором, причем СВЧ коммутатор соединен с блоком управления антенной системой, блок управления антенной системой соединен с первым усилителем высокой частоты, со вторым усилителем высокой частоты, с цифровым измерителем и двусторонней связью с первой антенной, а вторая антенна соединена с блоком управления антенной системой, причем первый усилитель высокой частоты соединен с первым смесителем частоты, второй усилитель высокой частоты соединен со вторым смесителем частоты, при этом первый смеситель частоты соединен с первым усилителем промежуточной частоты, второй смеситель частоты соединен со вторым усилителем промежуточной частоты, устройство временной автоматической регулировки усиления соединено с первым усилителем промежуточной частоты и со вторым усилителем промежуточной частоты, первый усилитель промежуточной частоты соединен с коммутатором промежуточной частоты, второй усилитель промежуточной частоты также соединен с коммутатором промежуточной частоты, а коммутатор промежуточной частоты соединен с усилителем промежуточной частоты, причем блок автоматической и ручной регулировки усиления соединен с усилителем промежуточной частоты, усилитель промежуточной частоты соединен с первым блоком фазовых детекторов, со вторым блоком фазовых детекторов и с блоком автоматической и ручной регулировки усиления, фазовращатель соединен с первым блоком фазовых детекторов, при этом первый блок фазовых детекторов соединен с первым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, второй блок фазовых детекторов соединен со вторым блоком аналого-цифровых преобразователей квадратурных сигналов в цифровую форму, первый блок аналого-цифровых преобразователей квадратурных сигналов в цифровую форму соединен с двухпортовым буферным оперативным запоминающим устройством блока первичной цифровой обработки, и второй блок аналого-цифровых преобразователей квадратурных сигналов в цифровую форму также соединен с двухпортовым буферным оперативным запоминающим устройством блока первичной цифровой обработки, причем в блоке первичной цифровой обработки двухпортовое буферное оперативное запоминающее устройство соединено с цифровым измерителем, а цифровой измеритель обеспечивает направление сигнала на вторичную цифровую обработку.
| Мобильный гидролокационный комплекс «ГИДРА», сертификат соответствия комплекса №0000906 | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Описание - Интернет, 03.02.2011 www.screen-co.ru | |||
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1999 |
|
RU2170442C1 |
| КОСМИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЮЩИЙ ИЗОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ | 1999 |
|
RU2158008C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОЛЩИНЫ ЛЬДА ЗАМЕРЗАЮЩИХ АКВАТОРИЙ | 2006 |
|
RU2319205C1 |
| МНОГОЦЕЛЕВАЯ КОСМИЧЕСКАЯ СИСТЕМА | 2008 |
|
RU2360848C1 |
| Способ определения состояния ледяного покрова | 1988 |
|
SU1788487A1 |

