Изобретение относится к области морской техники и предназначено для суточных, месячных, сезонных измерений на заданных горизонтах водной среды следующих параметров: гидрологических (скорости течения, направления течения, температуры, солености), физико-химических (количеств ингредиентов в морской воде), гидроакустических, биологических, (водородного показателя, содержания хлорофилла, фенола, нефтепродуктов), а также радиационных.
Измерение указанных параметров является важнейшей задачей для изучения океанов и морей с целью определения перспективных районов для добычи нефти и рыбы, выявления сейсмически опасных районов, а также экологического контроля.
Так как указанные измерения проводятся в открытом океане, станции должны быть надежными в работе, иметь высокие эксплуатационные характеристики, не мешать судоходству, быть всепогодными и работать подо льдом.
Известен ряд буйковых станций, предназначенных для измерения гидрологических параметров.
Это якорные буйковые станции, описанные в книге А.Ф.Маклаков, и др., “Океанографические приборы”. Л., Гидрометеоиздат, 1975, стр.78-84, 306-308, 318-325; в “Руководстве по гидрологическим работам в океанах и морях”, Л., Гидрометеоиздат, 1977, стр.493-501, рис. 20.3, 20.5, стр.573-539, 542, 543, рис. 21.11; в книге Г. О. Берто, “Океанографические буи”, Л., Судостроение, 1977, стр.113-121, рис 4.1-4.9.
Наиболее близким техническим решением является буйковая станция Вудс-Хоулского океанографического института в книге Г. О. Берто стр.120, рис.4.8. Буйковая станция содержит подводный буй, соединенный гибкой связью с якорем. На гибкой связи на заданных горизонтах размещены контейнеры с датчиками, предназначенные для измерения параметров водной среды.
Как аналоги, так и прототип в упомянутой выше литературе обладают высокой точностью измерений, но сложны, имеют большие габариты, требуют для постановки специально оборудованных кораблей и громоздких источников тока.
Существующие станции с электроприводом имеют большое потребление электроэнергии, значительные габариты, массы и не могут обеспечить измерения в течение длительного срока.
Якорные буйковые станции океанографического наблюдения не располагают техническими возможностями круглогодичного наблюдения за течениями на глубинах более 2000 м в одной географической точке. Поэтому среди большого пакета записей морских течений, которыми располагает управление гидрографии РФ, нет записи течений длительностью 0,5 года на глубинах более 1500 м, а основное количество записей относится к глубинам до 500 м с небольшой длительностью.
В морской технике известно много способов зондирования океанов с помощью лебедок, судов, платформ или подвески гирлянд из приборных контейнеров, т.е. буйковых станций. Все они требуют огромных затрат и мощных источников тока, а эффективность измерений незначительна.
Известная буйковая станция Вудс-Хоулского океанографического института обладает рядом существенных недостатков:
- так как каждый измерительный горизонт комплектуется автономным контейнером с измерительной аппаратурой, то на предельных глубинах океана при большом количестве горизонтов требуется большое количество аппаратуры, а именно: датчиков, процессоров, преобразовательных, регистрирующих устройств и источников питания, т.е. имеет место избыточность аппаратуры;
- перезарядка, т.е. установка новой аппаратуры требует выборку станции, что невозможно без включения гидроакустического отделителя и потери якоря;
- невозможность использования станции в течение длительного времени, так как источники питания должны иметь большую емкость, а, следовательно, и габариты.
Целью настоящего изобретения является увеличение диапазона исследуемых глубин, а, следовательно, и количества горизонтов, минимальное электропотребление функциональной и регистрирующей аппаратурой, упрощение и ускорение работ при постановках и перезарядках станций, возможности многоразового использования.
Поставленная цель достигается тем, что в станции, содержащей подводный буй с положительной плавучестью, контейнер с аппаратурой для измерения и регистрации параметров водной среды, якорного устройства, состоящего из основного и дополнительного якорей, причем в корпусе основного якоря установлен барабан с гибкой связью, которая проходит через дополнительный якорь, соединенный цепью с основным якорем, длина которой несколько больше углубления подводного буя, снабженного шаровыми грузами с устройством их размещения и выпуска, балластом для обеспечения всплытия подводного буя вместе с дополнительным якорем и клапаном впуска воды для компенсации веса сброшенного шарового груза.
Контейнер снабжен включателем запуска аппаратуры, рычажным электромагнитным пропускателем и приемно-сбрасывающим устройством для шаровых грузов.
Установка барабана с гибкой связью в корпусе якоря позволила облегчить подводный буй и увеличить держащую силу якоря.
Подводный буй соединен с якорным устройством гибкой связью, на которой закреплены втулки, определяющие измерительные горизонты. Верхняя часть втулки имеет сферическую поверхность, а нижняя - коническую.
Указанные признаки отсутствуют у прототипа и аналогов заявляемого изобретения, что подтверждает его соответствие критериям “новизна” и “существенные отличия”.
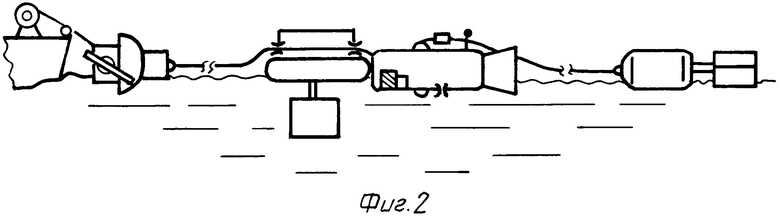
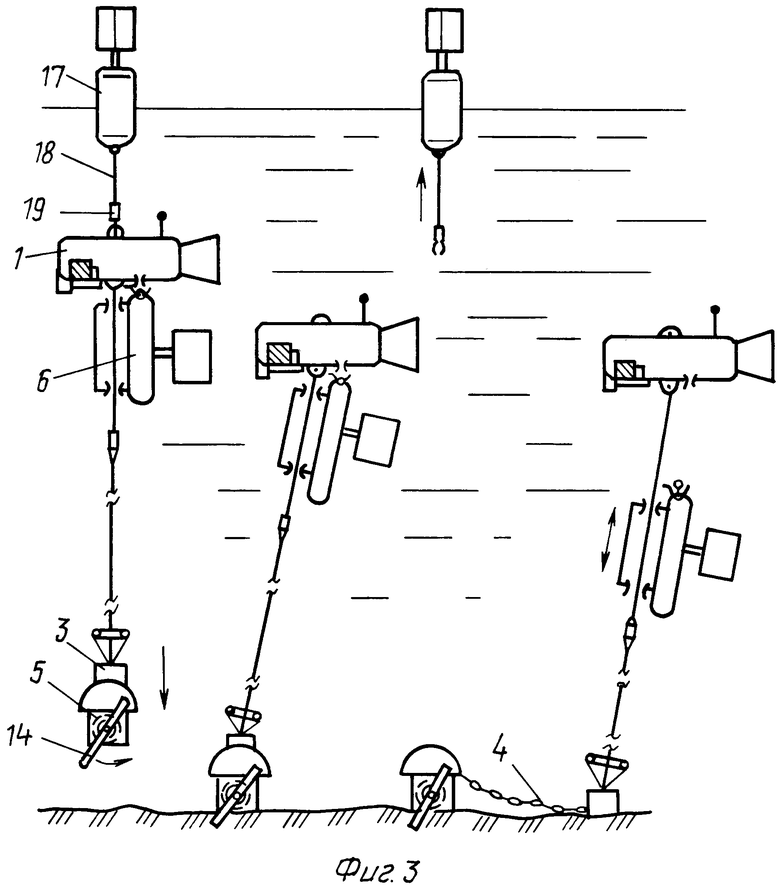
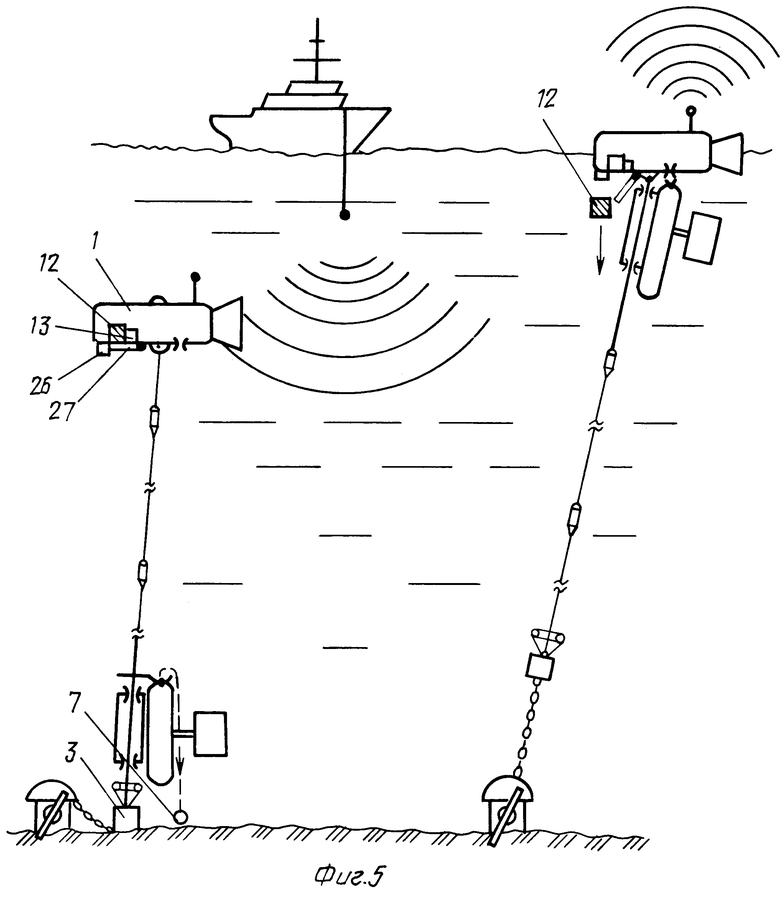
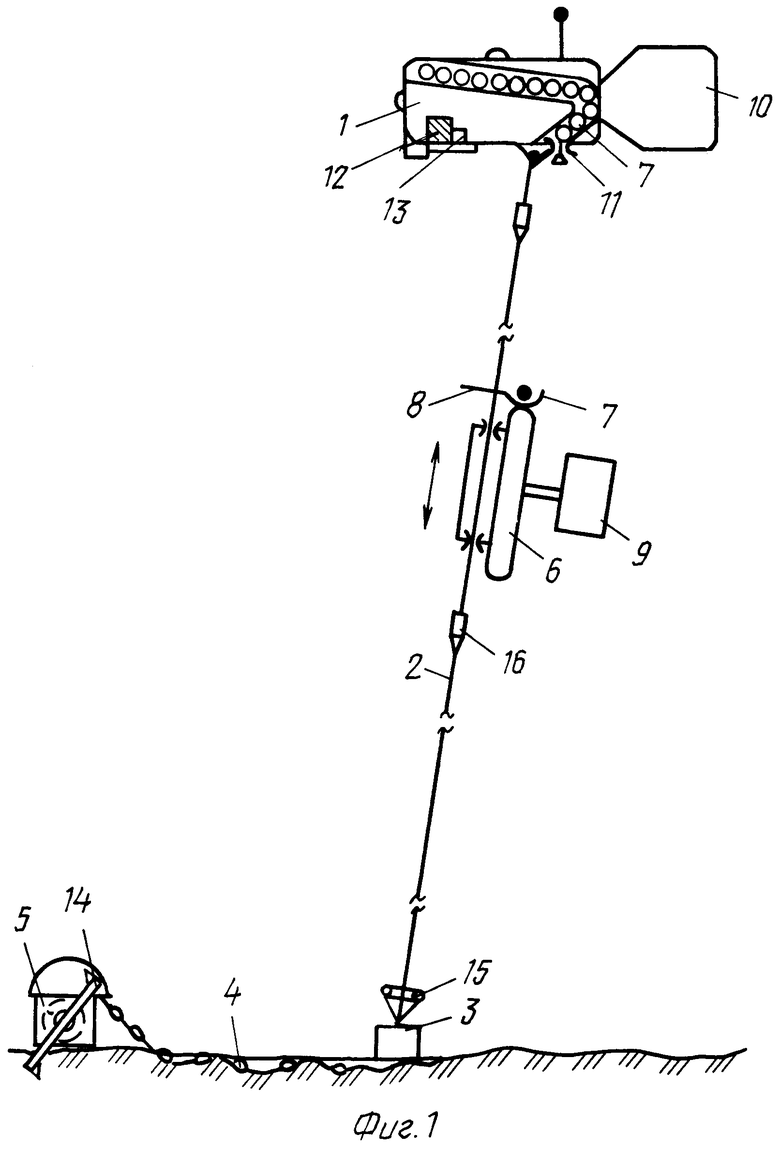
Сущность изобретения поясняется чертежами. На фиг.1 показана станция в рабочем состоянии на позиции. На фиг.2, 3 показан процесс постановки станции в позиционное положение. На фиг.4 представлена кинематическая схема основных устройств станции, а на фиг.5 - процесс подъема для перезарядки станции.
Позиционная станция зондирования водной среды по глубине (фиг.1) содержит подводный буй 1, устанавливаемый на заданное углубление от поверхности. Буй 1 соединен гибкой связью 2 (синтетический или стальной канат) с дополнительным якорем 3, который соединен цепью 4 с основным якорем 5. На гибкой связи 2 жестко установлены втулки 16, определяющие измерительные горизонты, а также подвижно установлен контейнер 6 с аппаратурой, состоящей из датчиков измеряемых параметров водной среды, процессора управления алгоритмом работы станции, преобразовательных устройств, “твердой” памяти, источников питания и функциональных устройств: включателя запуска аппаратуры, электромагнитного рычажного пропускателя и приемно-сбрасывающего устройства.
Движителем контейнера 6 к грунту служит шаровый груз 7, располагаемый на приемно-сбрасывающем устройстве 8, которое имеет шарнирную связь с контейнером 6, а всплытие обеспечивается положительной плавучестью контейнера после сброса груза при достижении контейнером якоря.
Для устойчивого положения в воде и ориентации по течению контейнер 6 снабжен пластинчатым стабилизатором 9, а буй 1 - стабилизатором 10. После выхода очередного груза 7 из буя 1 для компенсации его веса имеется клапан впуска воды 11. Для всплытия на поверхность буя 1 с контейнером 6 и дополнительным якорем 3 служит балласт 12, который сбрасывается гидроакустическим отделителем 13.
На барабане с гибкой связью закреплены лопасти гидродинамического тормоза 14. На дополнительном якоре 3 установлен сбрасыватель 15 для обеспечения сброса груза 7 на дно.
Алгоритм постановки станции представлен на фиг.2,3. В выбранной географической точке с судна, производящего постановку, сбрасывается установочный буй 17, который соединен стропом 18 посредством временного замка 19 с буем 1.
Положительная плавучесть буя 17 должна быть больше отрицательной плавучести станции, а длина стропа 18 равна величине заданного углубления буя 1.
Затем в воду опускается буй 1 вместе с контейнером 6. После разматывания 50-100 м гибкой связи судно дает малый ход, чтобы буи 1 и 17 вытянулись в одну линию, далее сбрасываются якоря 3, 5. Якорь 5 своим весом разматывает гибкую связь 2, находящуюся на барабане до достижения грунта. При разматывании гибкой связи 2 лопасти 14, закрепленные на оси барабана, замедляют скорость сматывания, а при достижении грунта врезаются в грунт и сматывание прекращается. Дополнительный якорь 3 отделяется от основного якоря 5 и освобождает цепь 4. Через заданное время срабатывает замок 19, строп 18 отделяется от буя 1, а буй 17 выбирается на судно. Станция находится в позиционном положении.
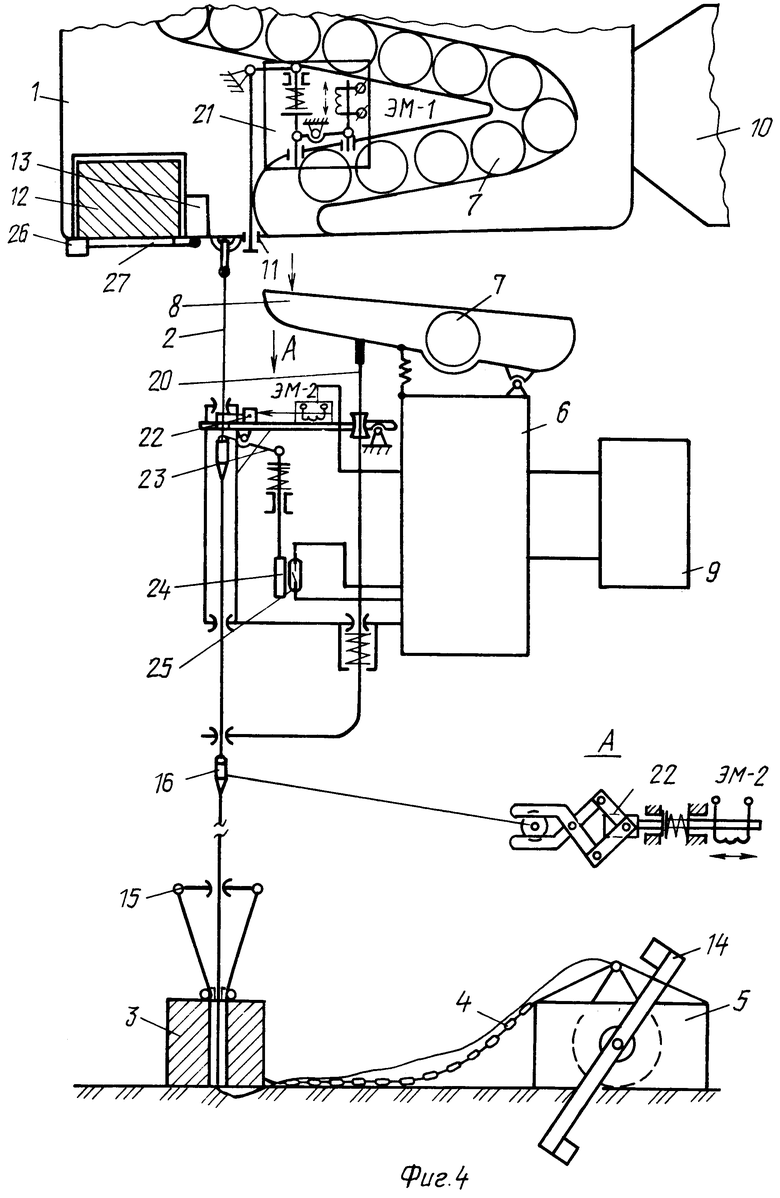
Для объяснения алгоритма работы станции после постановки воспользуемся кинематической схемой основных устройств станции, представленной на фиг.4.
В буе 1 установлено устройство для размещения грузов 7, которое представляет бункер с рычажным электромагнитным замком-отсекателем 21. Шаровые грузы 7 расположены в желобе с небольшим наклоном в сторону выходного отверстия. Горизонтальное расположение грузов 7 позволило уменьшить усилия на пальцы замка-отсекателя, повысить надежность работы, уменьшить габариты электромагнита ЭМ-1.
Команда на замок-отсекатель 21 поступает после того, как контейнер 6 лотком устройства 8 упрется в корпус буя 1. При срабатывании электромагнита ЭМ-1 замка-отсекателя 21 один конец рычага последнего освобождает груз 7, а другой управляет клапаном впуска воды в корпус буя 1 с целью компенсации изменения плавучести при выходе груза 7.
Приемно-сбрасывающее устройство состоит из лотка 8, закрепленного на контейнере 6 посредством подвижного шарнира и толкателя 20. Контейнер 6 при подходе к очередной втулке 16, определяющей измерительные горизонты, будет остановлен рычагами электромагнитного пропускателя 22, управляемого электромагнитом ЭМ-2. На шаровой поверхности втулки 16 контейнер при наличии стабилизатора 9 разворачивается и устанавливается по течению. Включение электромагнита ЭМ-2 осуществляется наклоном рычага 23, связанного с постоянным магнитом 24, обеспечивающим замыкание магнитоуправляемого контакта (геркона) 25, а следовательно, и запуск аппаратуры контейнера 6, а именно: включение датчиков, регистрацию параметров с этих датчиков и последующее их отключение. После срабатывания пропускателя 22 контейнер погружается до очередной втулки.
После прихода контейнера 6 к якорю 3 толкатель 20 взаимодействует с кольцом сбрасывателя 15 и опрокидывает лоток 8. Контейнер 6 приобретает положительную плавучесть и всплывает до соприкосновения с корпусом буя 1. При всплытии контейнера 6 рычаги электромагнитного пропускателя 22 раздвигаются под действием силы, которая возникает ввиду конической поверхности нижней части втулки 16.
После того, как очередной груз упадет в лоток 8 контейнера, процесс повторяется. При сбросе последнего груза необходима перезарядка станции.
Для выборки станции (фиг.5) судно приходит в заданную географическую точку и подает гидроакустический кодированный сигнал. Срабатывает гидроакустический отделитель 13, находящийся в корпусе буя 1, что обеспечивает подачу питания на пирозамок 26, который отдает крышку 27, что приводит к отделению балласта 12. Буй вместе с дополнительным якорем 3 всплывает и удерживается в одной точке основным якорем 5.
Из контейнера б извлекается модуль с регистрирующей аппаратурой и заменяется на новый. Из корпуса буя 1 удаляется вода, принятая во время выпуска грузов в качестве балласта. Устанавливается новый комплект шаровых грузов 7 и балласт 12, затем буй 1 опускается в воду. Так как буй 1 вместе с балластом 12 имеет плавучесть меньше чем, дополнительный якорь 3, последний опускается на грунт, а буй 1 - на заданное углубление.
Новые признаки позволяют производить измерение и регистрацию параметров водной среды, также зафиксировать астронамическое время и номер шара на максимальных глубинах и, следовательно, на большем количестве горизонтов с минимальным электропотреблением обеспечивают многоразовость использования, упрощают и ускоряют работы при постановках и перезарядках станции.
По сравнению с прототипом заявляемая станция позволяет производить измерения в выбранной географической точке океана на предельных глубинах в течение длительного времени.
Измерения производятся на каждом горизонте одним комплектом аппаратуры, что требует малую мощность источников электрического тока, а это существенно уменьшает массу и габариты станции. Измерительная и регистрирующая аппаратура может быть выполнена как в виде отдельных модулей, так и единого.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ БУЙКОВАЯ ПРИДОННАЯ СТАНЦИЯ | 2007 |
|
RU2344962C1 |
| СПОСОБ ПОСТАНОВКИ ДРЕЙФУЮЩЕГО ПРИБОРА НА ЗАДАННОЙ ГЛУБИНЕ | 2009 |
|
RU2414376C2 |
| ГИДРОАКУСТИЧЕСКИЙ БУЙ ДЛЯ ИССЛЕДОВАНИЯ МИРОВОГО ОКЕАНА | 2005 |
|
RU2297940C2 |
| ЗАГЛУБЛЕННОЕ БУЙКОВОЕ ГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО | 2003 |
|
RU2241630C1 |
| АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406639C1 |
| Способ прогнозирования сейсмического события и наблюдательная система для сейсмических исследований | 2016 |
|
RU2625100C1 |
| ЦИКЛИЧЕСКАЯ АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406640C1 |
| ПОДВОДНАЯ СИСТЕМА | 2018 |
|
RU2688912C1 |
| ПРОФИЛОГРАФ ДЛЯ ВЕРТИКАЛЬНОГО ЗОНДИРОВАНИЯ МОРСКОЙ СРЕДЫ | 2012 |
|
RU2499280C2 |
| ПОДВОДНОЕ СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2370406C1 |
Изобретение относится к морской технике и может быть использовано для суточных, месячных и сезонных измерений на разных глубинах гидрологических, физико-химических, биологических и других параметров. Предлагаемая станция содержит подводный буй, контейнер с аппаратурой для измерения параметров водной среды и якорь, соединенный гибкой связью с буем. При этом буй снабжен шаровыми грузами для обеспечения движения указанного контейнера к грунту, устройством их размещения и выпуска, балластом и клапаном впуска воды для компенсации веса буя при выпуске шаровых грузов. В корпусе якоря установлен барабан с гибкой связью, снабженный гидродинамическим тормозом. На гибкой связи подвижно установлен указанный контейнер и закреплены втулки, задающие измерительные горизонты. Контейнер снабжен взаимодействующими со втулками включателем запуска аппаратуры и пропускателем, обеспечивающим остановку контейнера на втулках и его перемещение через втулки. Снаружи контейнера установлено приемно-сбрасывающее устройство (лоток в шарнире), взаимодействующее с буем и якорем соответственно при приеме и сбросе шаровых грузов. Технический результат изобретения состоит в увеличении числа исследуемых станцией горизонтов (диапазона глубин), снижении ее энергопотребления, упрощении и ускорении работ при постановках и перезарядках станций, в возможности многоразового использования. 2 з. п. ф-лы, 5 ил.
| БЕРТО Г.О | |||
| Океанографические буи | |||
| - Л.: Судостроение, 1977, с.113-121, рис.4.1-4.9 | |||
| АВТОНОМНАЯ ПОЗИЦИОННАЯ СТАНЦИЯ ДЛЯ ЗОНДИРОВАНИЯ ВОДНОЙ СРЕДЫ ПО ГЛУБИНЕ, СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОДНОЙ СРЕДЫ ЭТОЙ СТАНЦИЕЙ И СПОСОБ ПЕРЕДАЧИ ЕЮ ИЗМЕРЕННЫХ ПАРАМЕТРОВ | 1994 |
|
RU2096247C1 |
| БУЙКОВАЯ СТАНЦИЯ ДЛЯ ГИДРОФИЗИЧЕСКИХ ИЗМЕРЕНИЙ | 1995 |
|
RU2090431C1 |
| US 3889307 А, 17.06.1975. | |||

