Изобретение относится к области морской техники и проблемам исследования и освоения Мирового океана, а более конкретно к вопросам создания автономных приборов, и может быть использовано для стабилизации на заданной глубине приборов-зондов буйкового подкласса, предназначенных для сбора гидрофизической информации в режиме дрейфа.
Известны дрейфующие автономные буйковые станции для изучения течений и проведения гидроакустических измерений в районах, где затруднительна постановка станций других классов (Проблемы исследования и освоения Мирового океана. / Под ред. А.И.Вознесенского.- Л.: «Судостроение», 1979; см. стр.198-200 и рис.1).
Известны дрейфующие приборы, функционирование которых при постановке на заданной глубине сопровождается разделением на составные части (см. авторское свидетельство СССР №1286461 - океанографический автономный зонд, патенты RU №2297940 - гидроакустический буй, №2214341 - дрейфующий прибор и др.).
Приборы такого подкласса доставляются на заданную глубину дрейфа устройствами для постановки прибора на заданной глубине, а дрейф при постановке обеспечивается гидродинамической компоновкой прибора и вывеской по маятниковой схеме «дрейфующий на поверхности буй (поплавок) - гибкий фал связи - прибор».
Известен способ постановки дрейфующего прибора на заданной глубине, включающий сброс прибора с борта исследовательского подводного аппарата-носителя (ПА) штоком манипулятора и отделение от прибора пиротехническим устройством всплывающего буйкового отсека, связанного с прибором гибким фалом (Хаукс Герхард. Подводная техника. Пер. с нем. Л.: «Судостроение», 1979, с.192-195 и рис.7.21).
Указанный способ принят за прототип.
Недостатком прототипа является низкая точность постановки, т.е. наличие значительных отклонений действительной глубины дрейфа прибора от заданной, что обусловлено существенным влиянием полей скоростей и давлений морской среды на взаимное пространственное положение разделенных отсеков дрейфующего прибора. Так, основная составляющая погрешности при значительной заданной глубине обусловлена наличием лишь прогнозируемого профиля и вектора скорости течения в заданном срезе по глубине. Опыт работы с дрейфующим прибором в слое Экмана показал, что при неблагоприятных условиях относительная погрешность по глубине может превышать 30%. Картина усугубляется при наличии сплошного ледового покрова, подледная поверхность которого имеет непрогнозируемые неровности и существенные перепады по глубине.
Целью предложенного технического решения является компенсация указанного недостатка без существенного усложнения средств реализации, ликвидация методической погрешности известного способа, т.е. повышение точности выполнения условия «глубина дрейфа прибора равна заданной».
Указанная цель достигается тем, что известный способ постановки автономного дрейфующего прибора на заданной глубине, включающий сброс прибора с борта ПА штоком манипулятора и отделение от прибора пиротехническим устройством всплывающего буйкового отсека (ОБ), связанного с прибором гибким фалом, дополняется постановочными операциями, когда после отделения ОБ притормаживают брашпилем гибкий фал связи «прибор-буй», регулируя брашпилем (моментом торможения и слабиной фала) глубину дрейфа прибора по сигналам обратной связи от приборного датчика текущей глубины, причем отделение ОБ сопровождают сбросом балластного груза.
Такое ведение постановки и особенности указанных операций в совокупности позволяют ликвидировать методическую погрешность постановки дрейфующего прибора на заданной глубине, т.к. глубина дрейфа прибора в этом способе по сравнению с прототипом равна заданной глубине с точностью до статической ошибки (или амплитуды автоколебаний) замкнутой системы стабилизации глубины, на которой проводится сбор гидрофизической информации.
Реализация предложенного способа, на взгляд заявителя, не требует использования специальных средств и демонстрируется на примере постановки малогабаритного автономного гидроакустического дрейфующего прибора.
На фиг.1 схематично представлен собственно дрейфующий прибор на борту ПА. На фиг.2 способ схематично иллюстрируется по характерным временным фазам для частного случая с простейшим по реализации релейным алгоритмом управления электроприводом брашпиля при Нзад=НПА, причем:
в положении а) прибор представлен на момент всплытия «на
короткой связке L0», после отделения ОБ и балласта;
в положении b) - на момент свободного расхождения отсеков,
в положении c) - на момент всплытия «в связке L1»,
в положении d) - на момент выхода ОБ на подледную (водную) поверхность.
Автономный дрейфующий прибор 1 содержит герметичный корпус 2 приборного отсека (ОП) с герметизирующим кольцом 3 поршневого уплотнения с торцом ОБ 4. В корпусе 2 установлен стандартный набор бортовой аппаратуры: информационно-управляющий блок (ИУБ), сменный (по назначению на опыт) комплект бортовой измерительно-регистрирующей аппаратуры с устройством обработки и хранения информации и источниками питания. Дополнительно ОП содержит соединенные информационно-управляющими цепями контроллер, датчик забортного давления 5, брашпиль 6 (с электроприводом и бобиной гибкого фала 7 связи отсеков) и релейно-усилительный блок 8 с задатчиком глубины Нзад, которые образуют замкнутую систему автоматического регулирования (САР) скорости вращения вала брашпиля 6. Пироболт 9 открывает отверстие в корпусе 2 для подачи забортной воды в герметичную полость между подпружиненными торцами корпуса 2 ОП и ОБ 4 для обеспечения отделения ОБ 4 от корпуса 2 по команде бортовой аппаратуры. В исходном состоянии ОБ 4 состыкован с корпусом 2 ОП разжимным балласт-хомутом 10. Шток 11 манипулятора ПА упирается в торец ОБ 4.
Постановка дрейфующего прибора на заданной глубине (например, Нзад=НПА [м]) проходит следующим образом. В ИУБ расположенного на борту ПА прибора вводится исходная информация. Прибор 1 штоком 11 выбрасывают за борт ПА и он начинает тонуть. По программной команде ИУБа проводят подрыв пироболта 9, заполняют забортной водой через отверстие в корпусе 2 межторцовую герметичную полость и сбрасывают балласт-хомут 10. После уравнивания давления в межторцовой полости с забортным ОБ 4 отделяется от корпуса 2 прибора, притормаживается брашпилем и всплывает «на короткой связке L0». По прохождении заданной глубины прибор переходит в режим свободного расхождения отсеков и по достижении ОП 2 заданной глубины постановки Нзад сверху по сигналу датчика давления 5 брашпиль 6 под управлением САР притормаживает фал 7, обеспечивая совместное всплытие «в связке L1» составных частей дрейфующего прибора (L - длина части фала 7, заторможенной на такте режима стабилизации). Совместное всплытие «в связке» продолжается до момента достижения ОП заданной глубины постановки Нзад снизу, когда по сигналу датчика давления 5 брашпиль 6 повторно растормаживает фал 7, обеспечивая независимое движение (расхождение) составных частей прибора - ОБ 4 и ОП 2 до момента, когда ОП 2 при погружении достигнет заданной глубины постановки. Брашпиль 6 циклично притормаживает и растормаживает фал 7, обеспечивая попеременно или совместное всплытие прибора «в связке L» или независимое движение (расхождение) составных частей прибора. Таким образом, прибор входит в режим автоколебаний по глубине, который заканчивается торможением фала брашпилем после выхода ОБ на поверхность, что и обеспечивает выполнение поставленной цели.
Пути дальнейшего повышения точности постановки прибора на заданной глубине (например, введением пропорционального управления электроприводом брашпиля) известны, см., например, К.Мерриэм. Теория оптимизации и расчет систем управления с обратной связью. / Пер. с англ. М.: «МИР», 1967.
По заявленному техническому решению проведен анализ альтернативных способов и дано подтверждение обоснованности заявленного схемно-конструктивного решения. Система разделения прибора прошла ЛСИ и натурные испытания (Акт №893/392-2/О-ПИ-08, ОАО «Концерн «МПО-Гидроприбор». С.-Петербург, 2008).
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический прибор | 2017 |
|
RU2660174C1 |
| ДВУХМОДУЛЬНАЯ ПОДВОДНАЯ ЛОДКА С АВАРИЙНО-СПАСАТЕЛЬНОЙ СИСТЕМОЙ, ОСНАЩЕННАЯ ОПЕРАТИВНО-ТАКТИЧЕСКИМ КОМПЛЕКСОМ | 2005 |
|
RU2309871C2 |
| РАДИОБУЙ ДЛЯ ПЕРЕДАЧИ СИГНАЛОВ БЕДСТВИЯ ИЗ-ПОДО ЛЬДА | 2020 |
|
RU2737151C1 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВСПЛЫТИЕМ ПОДВОДНОЙ ЛОДКИ, НЕ ИМЕЮЩЕЙ ХОДА, В ПОДЛЕДНОМ ПЛАВАНИИ И СПОСОБ УПРАВЛЕНИЯ ВСПЛЫТИЕМ | 2015 |
|
RU2621926C2 |
| АВТОНОМНАЯ БУЙКОВАЯ ПРИДОННАЯ СТАНЦИЯ | 2007 |
|
RU2344962C1 |
| АКУСТИЧЕСКИЙ РЕФЛЕКТОР МОБИЛЬНЫЙ | 2020 |
|
RU2755751C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709059C1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| ГИДРОАКУСТИЧЕСКИЙ БУЙ ДЛЯ ИССЛЕДОВАНИЯ МИРОВОГО ОКЕАНА | 2005 |
|
RU2297940C2 |

Изобретение относится к области морской техники и проблемам исследования и освоения Мирового океана. Способ постановки дрейфующего прибора на заданной глубине включает сброс прибора с борта подводного аппарата-носителя (ПА) штоком манипулятора, отделение от прибора пиротехническим устройством всплывающего буйкового отсека, связанного с прибором фалом. После отделения буйкового отсека притормаживают фал брашпилем, регулируя глубину постановки прибора по сигналу обратной связи от приборного датчика текущей глубины. Отделение буйкового отсека сопровождают сбросом балластного груза. Повышается точность постановки автономного прибора на заданной глубине, обеспечивается возможность использования приборов в условиях подледного сбора гидрофизической информации, обеспечивается безопасность проводки караванов подводных нефтеналивных судов в условиях крайнего Севера. 2 ил.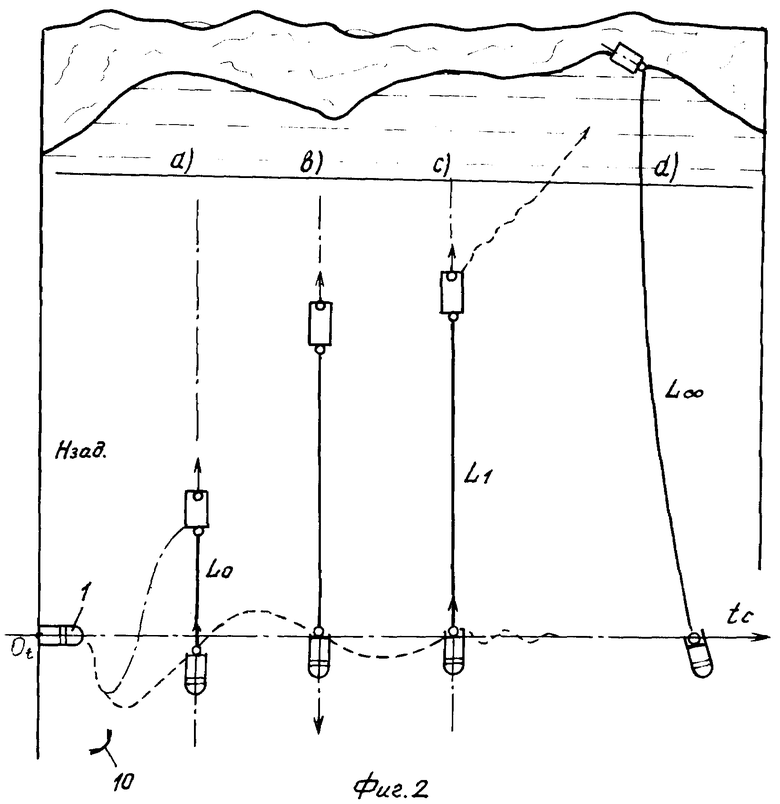
Способ постановки дрейфующего прибора на заданной глубине, включающий сброс прибора с борта подводного аппарата-носителя (ПА) штоком манипулятора и отделение от прибора пиротехническим устройством всплывающего буйкового отсека, связанного с прибором фалом, отличающийся тем, что после отделения буйкового отсека притормаживают фал брашпилем, регулируя глубину постановки прибора по сигналу обратной связи от приборного датчика текущей глубины, причем отделение буйкового отсека сопровождают сбросом балластного груза.
| Хаукс Герхард, Подводная техника, пер | |||
| с нем | |||
| - Л.: СУДОСТРОЕНИЕ, 1979, с.192-195, рис.7.21 | |||
| US 6463800 В2, 15.10.2002 | |||
| WO 2007114714 A1, 11.10.2007 | |||
| Автономный океанографический зонд | 1985 |
|
SU1286461A1 |
| ГИДРОАКУСТИЧЕСКИЙ БУЙ ДЛЯ ИССЛЕДОВАНИЯ МИРОВОГО ОКЕАНА | 2005 |
|
RU2297940C2 |

