Техническое решение относится к технике морских исследований посредством профилографов (станций) вертикального зондирования морской среды и может быть использовано в автоматизированных подводных аппаратах (зондах) заякоренного типа для проведения комплексных наблюдений за гидрологическими параметрами и за динамикой водной среды, а также для химико-биологического и экологического контроля и мониторинга акваторий.
Известны конструкции буйковых станций [5-9], перемещаемых вверх-вниз по глубине посредством лебедки с тросом (кабель-тросом) размещенных внутри этих станций (зондов).
Общими признаками известных профилографов (зондов) [3-5 и др.], сканирующих по глубине, являются трос (или кабель-трос) снабженный на одном конце якорем с размыкателем, а на другом - плавучестью, установленный на тросе контейнер, в котором размещены зондирующие измерительные приборы, блок приема и хранения измерительной информации, система всплытия-погружения, блок управления, блок питания, а также блок радио- и гидроакустической связи. При этом в части источников (см. например [4, 5, 7, 9]) система всплытия-погружения зондирующих станций только декларируется, но конструктивно не рассматривается. В ряде устройств [6, 8 и др.] перемещение контейнера осуществляется посредством намотки трос-кабеля на барабан лебедки с помощью реверсивного электродвигателя, снабженного редуктором.
Известно [3], что наличие лебедки является недостатком и в определенной степени ограничивает возможности профилографа.
Альтернативой использованию в качестве спуско-подъемного устройства лебедки является применение системы всплытия-погружения сканирующих (циклирующих) по тросу зондов [1-3].
Так, циклирующий зонд [3] для профилирования по глубине водной среды выполнен в виде обтекаемого крыла с размещенными внутри него тросом с направляющими роликами и двигателем с редуктором.
Известный аквазонд [2] циклирующего режима содержит последовательное тросовое соединение якоря, размыкающего устройства и притопленного поплавка, перемещающийся по тросу зонд снабжен набором датчиков, устройством обработки, источником питания и электроприводом, размещенным в отдельной от зонда плавучести.
Принятый за прототип профилограф (автономная станция для зондирования водной среды по глубине) по патенту RU 2297939 С2, 27.04.2007 [1] содержит кабель-трос, снабженный на одном конце якорем с размыкателем, а на другом - плавучестью, и установленный на кабель-тросе контейнер, выполненный с возможностью вертикального перемещения по кабель-тросу, при этом в контейнере размещены зондирующие измерительные приборы, блок приема и хранения измерительной информации, система всплытия-погружения, блок управления, блок питания, а также блок радио- и гидроакустической связи, причем система всплытия-погружения выполнена в виде реверсивного электропривода.
Основным недостатком устройства [1], как и других известных аналогов [2, 3], является наличие в системе всплытия-погружения редуктора, к.п.д. которого, как правило, не превышает 70%. Блок всплытия-погружения с высокооборотным (до 3000 об/мин) электродвигателем и понижающим шестереночным редуктором усложняет конструкцию профилографа [1], повышает его массу и габариты и снижает ресурс работы при автономном питании профилографа. Размещение (пропускание) кабель-троса внутри блока профилографа повышает трудоемкость и усложняет сборку (компоновку) устройства, его профилактику и ремонт.
Сущность предлагаемого технического решения заключается в создании профилографа для вертикального зондирования морской среды, в котором система всплытия-погружения, в отличие от известных [1-3] устройств, выполнена в виде безредукторного реверсного электропривода с использованием шагового электродвигателя с магнитной муфтой.
Основной технический результат - упрощение конструкции профилографа за счет исключения редуктора из системы всплытия-погружения, повышение к.п.д. и надежности электропривода и, как следствие, - увеличение рабочего ресурса автономной работы профилографа. По сравнению с известными устройствами [1-3 и др.] профилограф имеет меньшую массу и меньшие габариты, а также рациональную конструкцию направляющего кабель-трос устройства вне обтекаемой оболочки контейнера.
Технический результат достигается следующим образом.
Профилограф для вертикального зондирования морской среды содержит кабель-трос, снабженный на одном конце якорем с размыкателем, а на другом - плавучестью, и установленный на кабель-тросе контейнер, выполненный с возможностью вертикального перемещения по кабель-тросу, при этом в контейнере размещены зондирующие измерительные приборы, блок приема и хранения измерительной информации, система всплытия-погружения, блок управления, блок питания, а также блок радио- и гидроакустической связи, причем система всплытия-погружения выполнена в виде реверсивного электропривода.
Отличительной особенностью профилографа является то, что реверсивный электропривод выполнен безредукторным и включает размещенный внутри цилиндрического корпуса с крышкой шаговый электродвигатель (ШЭД) с закрепленной на валу внутренней магнитной полумуфтой. Снаружи корпуса на подшипниках скольжения расположена внешняя магнитная полумуфта, на которой установлен ведущий приводной ролик, который посредством роликового прижимного механизма, закрепленного на корпусе, взаимодействует с кабель-тросом, обеспечивая вертикальное перемещение контейнера. Крышка электропривода снабжена герметичным электроразъемом для подачи питания и сигналов управления на ШЭД.
Профилограф также отличается тем, что контейнер выполнен в виде рамы с закрепленными на ней аппаратурными блоками, помещенной в обтекаемую оболочку из высокопрочной пластмассы, и установленной на кабель-тросе посредством ведущего приводного ролика и роликового прижимного механизма, смонтированного из двух рольгангов. При этом кабель-трос расположен вне обтекаемой оболочки контейнера.
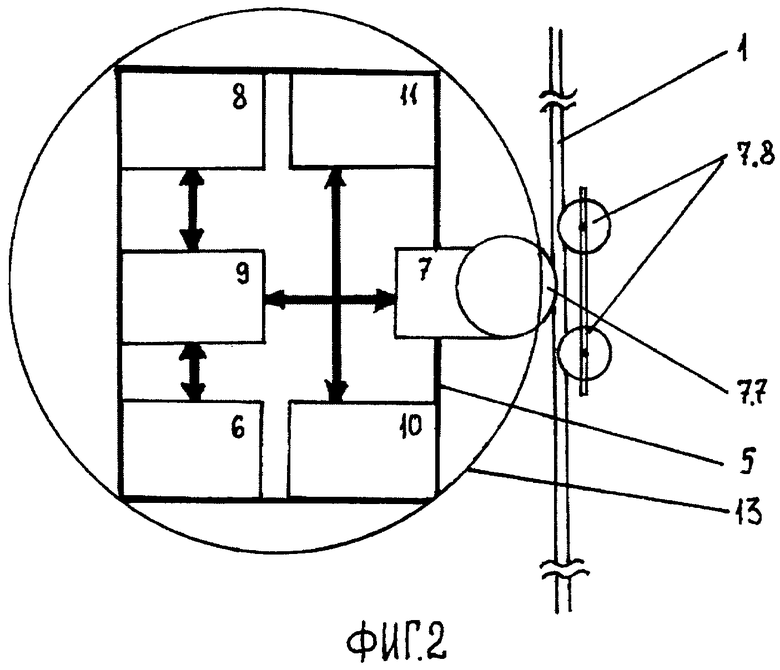
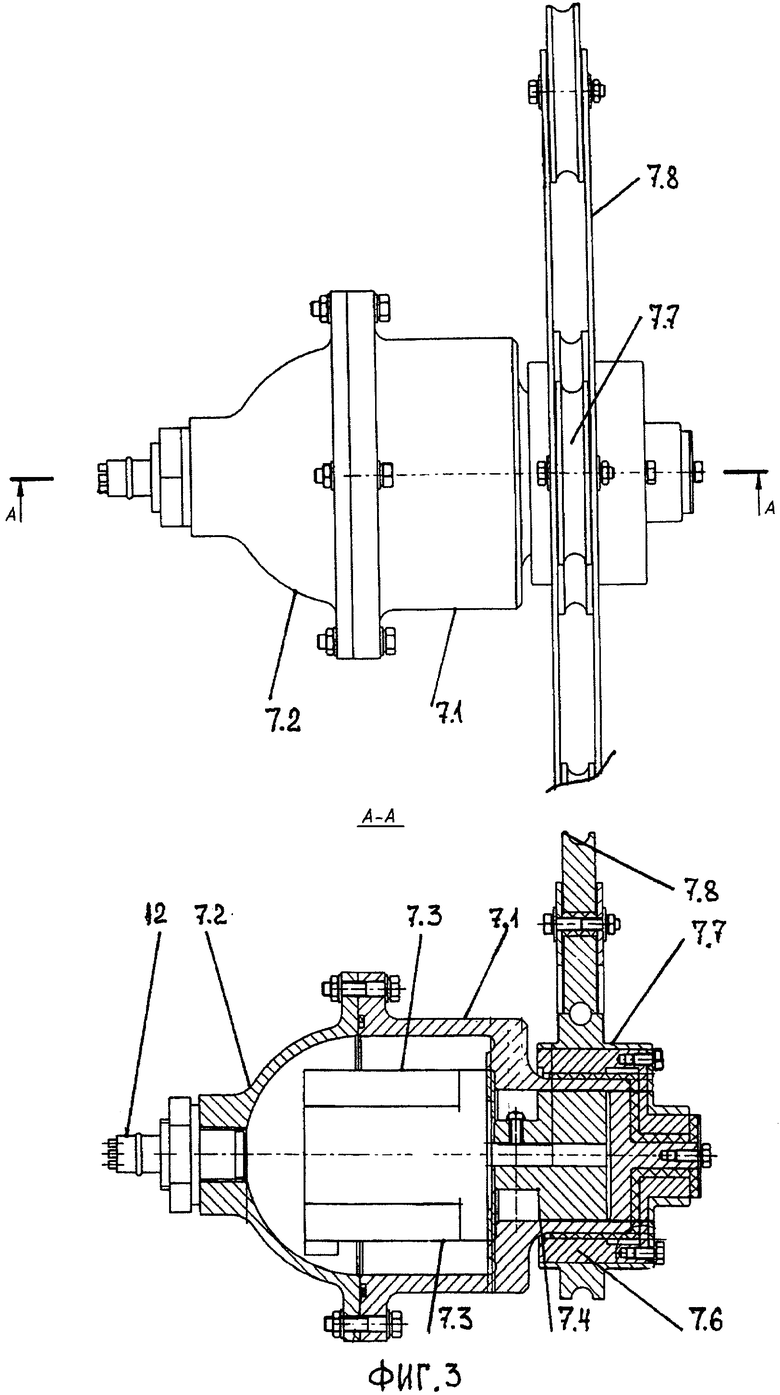
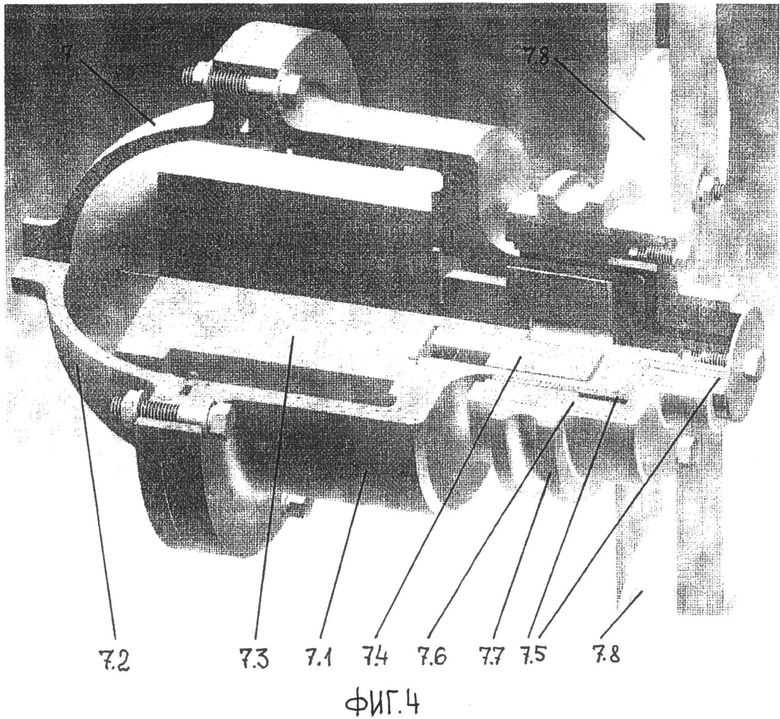
На фиг.1 показана общая конструктивная схема профилографа для вертикального зондирования морской среды; на фиг.2 приведена блок-схема размещения аппаратуры внутри контейнера; на фиг.3 представлена схема системы всплытия-погружения, выполненной в виде безредукторного реверсивного электропривода с ШЭД; фиг.4 иллюстрирует конструкцию электропривода.
На чертежах использованы следующие обозначения:
1 - кабель-трос;
2 - якорь;
3 - размыкатель;
4 - плавучесть;
5 - контейнер профилографа;
6 - блок зондирующих измерительных приборов;
7 - система всплытия-погружения (электропривод) в составе:
7.1 - цилиндрический корпус;
7.2 - крышка;
7.3 - шаговый электродвигатель ШЭД (схематично в разрезе);
7.4 - внутренняя магнитная полу муфта;
7.5 - подшипники скольжения;
7.6 - внешняя магнитная полумуфта;
7.7 - ведущий приводной ролик;
7.8 - роликовый прижимной механизм;
8 - блок приема и хранения измерительной информации;
9 - блок управления;
10 - блок питания;
11 - блок радио- и гидроакустической связи;
12 - электроразъем;
13 - обтекаемая оболочка контейнера.
Работа профилографа для вертикального зондирования морской среды, в основном, аналогична работе известных устройств [1-3] и заключается в следующем.
В пункте наблюдения судно-носитель погружает кабель-трос 1, снабженный на одном конце якорем 2 с размыкателем 3, а на другом-плавучестью 4, с установленным на кабель-тросе контейнером 5 (фиг.1). Контейнер 5 посредством электропривода 7 перемещается вверх-вниз по кабель-тросу 1 по командам блока 9 управления. На заданных горизонтах контейнер 5 останавливается, и блок 6 зондирующих измерительных приборов измеряет гидрологические и динамические параметры водной среды, а также осуществляет химико-биологические и экологические замеры. Прием и хранение измерительной информации осуществляет блок 8, питание аппаратуры контейнера 5 обеспечивает блок 10. Для радио- и гидроакустической связи контейнера 5 с судном-носителем служит блок 11. Управление работой аппаратуры профилографа, размещенной в контейнере 5 (фиг.2) осуществляет программно-вычислительный блок 9. Структура и работа блоков 6, 8-11 известны и приведены, например в RU 28778 U1, 10.04.2003; RU 2229146, 20.05.2004.
Функционирование профилографа отличается, в основном, работой системы 7 всплытия-погружения (электропривода). Реверсивный электропривод 7 (фиг.3, 4) выполнен безредукторным и включает размещенный внутри цилиндрического корпуса 7.1 с крышкой 7.2 шаговый электродвигатель ШЭД 7.3 с магнитной муфтой, который по программам, заданным блоком 9 управления, обеспечивает перемещение контейнера 5 вверх-вниз по кабель-тросу 1. Магнитная муфта (внутренняя и внешняя полумуфты 7.4 и 7.6) служат магнитным пускателем электропривода 7 для передачи вращающего момента ведущему приводному ролику 7.7.
В качестве ШЭД 7.3 с магнитной муфтой может быть использован, например, низкооборотный (19-94 об/мин) шаговый электродвигатель марки AD-200-21. Работой ШЭД 7.3 электропривода 7 управляет блок 9 через электроразъем 12, по которому также подается электропитание от блока 10.
Аппаратурная часть профилографа в составе блоков 6-11 закреплена на раме контейнера 5, помещенной в обтекаемую оболочку 13 (фиг.2).
Перемещение контейнера 5 по кабель-тросу 1 осуществляется посредством ведущего приводного ролика 7.7 и прижимного (направляющего) механизма 7.8, смонтированного из двух рольгангов. Фиксация (стопор) приводного ролика 7.7 обеспечивает остановку движения контейнера 5 на заданном горизонте измерения.
Опытный образец профилографа практически подтвердил достижение технического результата: упрощение конструкции при снижении массы и габаритов электропривода в среднем на 10-15% и уменьшение его энергопотребления (а следовательно, увеличение рабочего ресурса с автономным источником питания) в среднем до 15-20%.
Таким образом, из описания профилографа и его работы следует, что достигается его назначение с указанным техническим результатом, который находится в причинно-следственной связи с совокупностью существенных признаков устройства.
ИСТОЧНИКИ ПО УРОВНЮ ТЕХНИКИ
I. Прототип и аналоги:
1. RU 2297939 С2, 27.04.2007 (прототип).
2. RU 2325674 С1, 27.05.2008 (аналог).
3. US 5869756 (А), 09.02.1999 (аналог).
4. RU 2404081 С1, 20.11.2010 (аналог).
II. Дополнительные источники по уровню техники:
5. RU 2096247 С1, 20.11.1997.
6. RU 2184674 С1, 10.07.2002.
7. GB 1248901 (А1), 06.10.1971.
8. US 2009269709 (А1), 29.10.2009.
9. JP 2010285072 (А), 24.12.2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подводный лебедочный зонд | 2017 |
|
RU2642677C1 |
| ТЕРМОЗОНД ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ВОДЫ | 2012 |
|
RU2513635C1 |
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
| АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406639C1 |
| ЦИКЛИЧЕСКАЯ АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406640C1 |
| ЗАЯКОРЕННАЯ ПРОФИЛИРУЮЩАЯ ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2014 |
|
RU2545159C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| ДОННЫЙ ТРАЛОУСТОЙЧИВЫЙ АВТОНОМНЫЙ ГИДРОАКУСТИЧЕСКИЙ МОДУЛЬ | 2010 |
|
RU2481594C2 |
Использование: морские исследования посредством профилографов (станций) вертикального зондирования морской среды, в автоматизированных подводных аппаратах (зондах) заякоренного типа для проведения комплексных наблюдений за гидрологическими параметрами и за динамикой водной среды, а также для химико-биологического и экологического контроля и мониторинга акваторий. Сущность: создание профилографа для вертикального зондирования морской среды, в котором система всплытия-погружения, в отличие от известных устройств, выполнена в виде безредукторного реверсного электропривода с использованием шагового электродвигателя с магнитной муфтой. Технический результат: упрощение конструкции профилографа за счет исключения редуктора из системы всплытия-погружения, повышение кпд и надежности электропривода и, как следствие, - увеличение рабочего ресурса автономной работы профилографа. 1 з.п. ф-лы, 4 ил.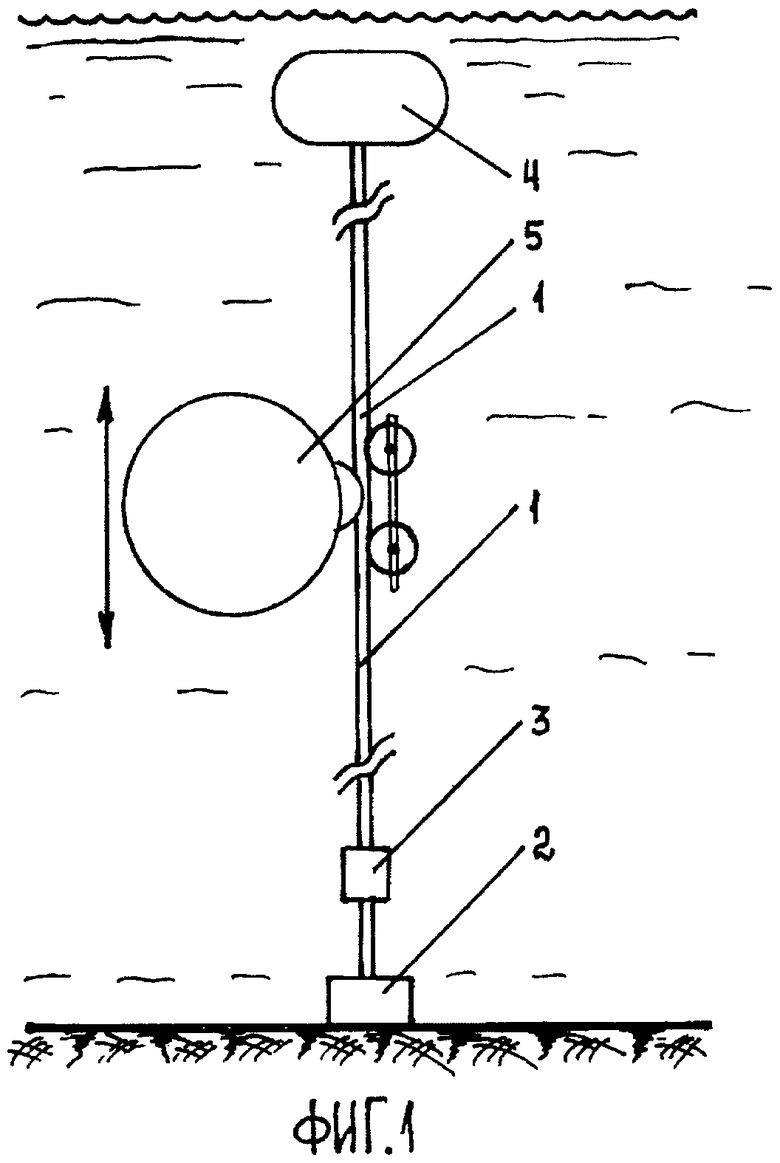
1. Профилограф для вертикального зондирования морской среды, содержащий кабель-трос, снабженный на одном конце якорем с размыкателем, а на другом - плавучестью, и установленный на кабель-тросе контейнер, выполненный с возможностью вертикального перемещения по кабель-тросу, при этом в контейнере размещены зондирующие измерительные приборы, блок приема и хранения измерительной информации, система всплытия-погружения, блок управления, блок питания, а также блок радио- и гидроакустической связи, причем система всплытия-погружения выполнена в виде реверсивного электропривода, отличающийся тем, что реверсивный электропривод выполнен безредукторным и включает размещенный внутри цилиндрического корпуса с крышкой шаговый электродвигатель (ШЭД) с закрепленной на валу внутренней магнитной полумуфтой, снаружи корпуса на подшипниках скольжения расположена внешняя магнитная полумуфта, на которой установлен ведущий приводной ролик, который посредством роликового прижимного механизма, закрепленного на корпусе, взаимодействует с кабель-тросом, обеспечивая вертикальное перемещение контейнера, а крышка электропривода снабжена герметичным электроразъемом для подачи питания и сигналов управления на ШЭД.
2. Профилограф по п.1, отличающийся тем, что контейнер выполнен в виде рамы с закрепленными на ней аппаратурными блоками, помещенной в обтекаемую оболочку из высокопрочной пластмассы и установленной на кабель-тросе посредством ведущего приводного ролика и роликового прижимного механизма, смонтированного из двух рольгангов, причем кабель-трос расположен вне обтекаемой оболочки контейнера.
| Способ восстановления изношенных деталей | 1959 |
|
SU120397A1 |
| АВТОНОМНАЯ ПОЗИЦИОННАЯ СТАНЦИЯ С СИСТЕМОЙ ВСПЛЫТИЯ-ПОГРУЖЕНИЯ С КАБЕЛЬ-ТРОСОМ И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2005 |
|
RU2297939C2 |
| Прибор для определения твердости металлов методом вдавливания | 1942 |
|
SU67057A1 |
| RU 20096247 С1, 20.11.1997 | |||
| US 2008068926 А1, 20.03.2008. | |||

