Настоящее изобретение относится к области устройств для отсечки при останове и отсечки при превышении допустимой скорости для турбореактивного двигателя и средств для тестирования этих двух режимов отсечки.
Турбореактивный двигатель обязательно имеет устройство для отсечки подвода горючего непосредственно с места пилота в самолете, на котором установлен турбореактивный двигатель. Это является нормативным требованием.
Такой способ отсечки турбореактивного двигателя называется отсечкой при останове.
Набор элементов оборудования, которые участвуют в выполнении отсечки при останове называется системой отсечки при останове.
Также турбореактивный двигатель должен быть оснащен устройством для его защиты от чрезмерных скоростей вращения (превышающих допустимую скорость), в частности, чтобы предотвратить разрушение дисков турбины. Это также нормативное требование.
Такой способ защиты турбореактивного двигателя называется защитой от превышения скорости.
Набор технических средств и программных элементов, участвующих в работе защиты от превышения скорости называется системой защиты от превышения скорости.
Управление отсечкой при останове осуществляется с места пилота в самолете с помощью рукоятки остановки двигателя, называемой рычагом управления. Этот рычаг управления может быть таким же, как дроссельная рукоятка, тогда положение отсечки соответствует конкретному положению этой рукоятки.
Отсечка при превышении скорости происходит автоматически после того, как обнаружено, что скорость вращения вала двигателя превосходит максимально допустимую скорость вращения на заранее определенный процент.
Превышение скорости можно обнаружить при сцеплении под низким давлением, в этом случае речь идет о числе оборотов N1, или при сцеплении под высоким давлением, в этом случае речь идет о числе оборотов N2. Превышение скорости обнаруживается посредством определения величины, которая отличается от N1 или N2.
Согласно инструкциям контроль отсечки при останове и отсечка при превышении скорости должен выполняться в период между посадкой и следующим взлетом.
В соответствии с одной известной методикой тестирование превышения скорости выполняется путем воздействия на систему защиты от превышения скорости, которая отключается при останове двигателя после посадки. Это достигается посредством изменения значения отключения для этой защиты до значения скорости вращения, которая меньше скорости холостого хода двигателя, либо с помощью компьютера, управляющего двигателем, либо механическим путем посредством изменения установки пружины. Если двигатель останавливается, это свидетельствует о корректной работе системы защиты от превышения скорости, и такое тестирование выполняется после каждого полета.
Система отсечки при останове проверяется во время проведения работ по техническому обслуживанию.
Настоящее техническое решение заключается в изменении и адаптации конструкции гидромеханического регулятора горючего, конструкции логической части компьютера регулирования двигателя и конструкции блоков обнаружения превышения скорости турбореактивного двигателя.
Таким образом, адаптация рабочей конструкции и логики представляет собой средство автоматической проверки того, что вся система защиты от превышения скорости работает корректно, непосредственно перед запуском турбореактивного двигателя.
Также обеспечивается способ проверки работы системы отсечки при останове, когда турбореактивный двигатель останавливается после посадки.
Следовательно, комбинация/оптимизация конструкции гидромеханического регулятора горючего с конструкцией электронной системы обеспечивает средство автоматической и полной (коэффициент охвата 100%) проверки того, что эти две системы (защиты от превышения скорости и отсечки при останове) работают корректно.
Таким образом, изобретение относится в первую очередь к устройству для управления и тестирования системы отсечки при останове авиационного двигателя, содержащему средство для выдачи сигнала управления подводом допустимого потока горючего в форсунки двигателя, причем сигнал управления вводится в средство управления питателем подачи горючего, средство управления выполнено с возможностью воздействия на подающий питатель таким образом, что он выдает допустимый поток, датчик, определяющий значение действительного мгновенного потока, подводимого в форсунки двигателя, причем средство отсечки при останове управляется положением рычага управления, положение отсечки рычага управления формирует управляющую команду для приведения в действие средства отсечки подвода горючего в форсунки двигателя, причем упомянутая команда для приведения в действие средств отсечки горючего имеет преимущество перед сигналом управления допустимого потока, отличающееся тем, что тестирование корректности работы системы отсечки при останове заключается в измерении разности между значением допустимого потока горючего и действительным потоком горючего, измеренным датчиком, определяющим значение действительного мгновенного потока. Средство управления отсечкой подвода горючего при останове содержит электроклапан отсечки при останове и отсечной клапан, при этом клапан открывается по команде отсечки при останове, сбрасывая тем самым давление, чтобы закрыть отсечной клапан.
Изобретение также относится к устройству защиты от превышения скорости для авиационного двигателя, содержащего средство выдачи сигнала управления подводом допустимого потока горючего в форсунки двигателя, причем сигнал управления допустимым потоком горючего принимается средством управления питателем подачи горючего, средство управления выполнено с возможностью воздействия на подающий питатель таким образом, что он выдает допустимый поток, датчик, определяющий значение подвода действительного мгновенного потока в форсунки двигателя, средства для обнаружения действительного превышения скорости двигателя, средства для обнаружения испытательного превышения скорости двигателя, причем средства обнаружения превышения скорости выполнены с возможностью выдачи команды для приведения в действие средств отсечки потока горючего в форсунки, команда приведения в действие средств отсечки горючего имеет преимущество перед сигналом управления допустимого потока, отличающееся тем, что действительное превышение скорости или испытательное превышение скорости обнаруживается в логическом электронном модуле, в который вводится величина, представляющая значение действительной мгновенной скорости вращения двигателя, при этом модуль содержит переключатель состояния, который может быть, по меньшей мере, в двух состояниях, испытательном состоянии и нормальном состоянии, упомянутый модуль выполнен с возможностью выполнения сравнения между действительной скоростью вращения и порогом испытательного превышения скорости, когда переключатель состояния находится в испытательном состоянии, и между действительной скоростью вращения и порогом действительного превышения скорости, когда переключатель состояния находится в нормальном состоянии, при этом модуль выдает команду на перекрытие средствам отсечки подвода горючего, и тестирование корректности работы отсечки двигателя при превышении скорости заключается в измерении разности между допустимым потоком горючего и действительным потоком горючего, измеренным датчиком действительного значения мгновенного потока горючего. Средство управления отсечкой подвода горючего при превышении скорости содержит электроклапан отсечки при превышении скорости и отсечной клапан, при этом клапан открывается в случае превышения скорости по команде, принятой от электронного модуля обнаружения превышения скорости, и открывает клапан, сбрасывая тем самым давление, чтобы закрыть отсечной клапан. Причем состояние переключателя состояния управляется логическим модулем управления переключателем состояния, принимающим информацию о скорости вращения двигателя, информацию о фазе полета, информацию о положении команды запуска двигателя, а также принимающим или хранящим в памяти разные значения порога скорости, при этом логический модуль управления выполнен с возможностью помещения переключателя в испытательное состояние, если самолет находится на земле и команда воспламенения приведена в положение “включено”, если же самолет находится в полете и превышен действительный порог превышения скорости, то модуль помещает переключатель состояния в его нормальное состояние, при этом когда самолет находится на земле и команда воспламенения приведена в положение “включено”, скорость вращения двигателя возрастает выше скорости Va, начиная с которой можно подавать горючее в форсунки, при этом скорость Va выше, чем порог Vst испытательного превышения скорости, а когда самолет находится в полете и переключатель состояния находится в испытательном состоянии после превышения скорости, команда воспламенения переключается из положения “включено” в положение “выключено”. В этом случае состояние переключателя состояния управляется логическим модулем управления переключателем состояния, принимающим информацию о скорости вращения двигателя, информацию о фазе полета, информацию о положении команды запуска двигателя, а также принимающим или хранящим в памяти разные значения порога скорости, при этом логический модуль управления выполнен с возможностью помещения переключателя в испытательное состояние, если самолет находится на земле и команда воспламенения приведена в положение “включено”. Если же самолет находится в полете и превышен действительный порог превышения скорости, то этот модуль помещает переключатель состояния в его нормальное состояние. Когда самолет находится на земле и команда воспламенения приведена в положение “включено”, скорость вращения двигателя возрастает выше скорости Va, начиная с которой можно подавать горючее в форсунки, при этом скорость Va выше, чем порог V3t испытательного превышения скорости, а когда самолет находится в полете и переключатель состояния находится в испытательном состоянии после превышения скорости, команда воспламенения переключается из положения “включено” в положение “выключено”.
Изобретение также относится к устройству для управления и тестирования системы отсечки при останове и защиты от превышения скорости для авиационного двигателя, содержащего средство выдачи сигнала для управления подводом допустимого потока горючего в форсунки двигателя, причем сигнал управления допустимым потоком горючего принимается средством управления питателем подачи горючего, средство управления выполнено с возможностью воздействия на подающий питатель таким образом, что он выдает допустимый поток, датчик, определяющий значение действительного мгновенного подвода потока в форсунки двигателя, средства обнаружения действительного превышения скорости двигателя, средства обнаружения испытательного превышения скорости двигателя, причем средства обнаружения превышения скорости выполнены с возможностью выдачи команды для приведения в действие средств отсечки потока горючего в форсунки, команда имеет преимущество перед сигналом управления потоком, разрешенным средством управления потоком горючего в форсунки двигателя, причем отсечка при останове управляется положением рычага управления, положение отсечки рычага управления формирует команду для приведения в действие средств отсечки подвода горючего в форсунки двигателя, команда приведения в действие средств отсечки горючего имеет преимущество перед командой допустимого потока горючего, в котором согласно изобретению действительное превышение скорости или испытательное превышение скорости обнаруживается в электронном логическом модуле, в который вводится величина, представляющая значение действительной мгновенной скорости вращения двигателя, модуль содержит переключатель состояния, который может быть, по меньшей мере, в двух состояниях, испытательном состоянии и нормальном состоянии, упомянутый модуль выполнен с возможностью выполнения сравнения между действительной скоростью вращения и порогом испытательного превышения скорости, когда переключатель состояния находится в испытательном состоянии, и между действительной скоростью вращения и порогом действительного превышения скорости, когда переключатель состояния находится в нормальном состоянии, при этом модуль выдает команду на перекрытие средству отсечки подвода горючего, и тестирование корректности работы отсечки двигателя при превышении скорости заключается в измерении разности между допустимым потоком горючего и действительным потоком горючего, измеренным датчиком значения действительного мгновенного потока горючего, и тестирование корректности работы отсечки двигателя при останове заключается в определении разности между допустимым потоком горючего и действительным потоком горючего, измеренным датчиком значения действительного мгновенного потока горючего. В устройстве согласно изобретению средство управления отсечкой подвода горючего при останове содержит электроклапан отсечки при останове и отсечной клапан, при этом клапан открывается по команде отсечки при останове, сбрасывая тем самым давление, чтобы закрыть отсечной клапан. Средство управления отсечкой подвода горючего при превышении скорости содержит электроклапан отсечки при превышении скорости и отсечной клапан, при этом клапан открывается в случае превышения скорости по команде, принятой от электронного модуля обнаружения превышения скорости, и открывает клапан, сбрасывая тем самым давление, чтобы закрыть отсечной клапан.
В дальнейшем изобретение поясняется описанием примерного варианта воплощения изобретения со ссылками на прилагаемые чертежи, на которых
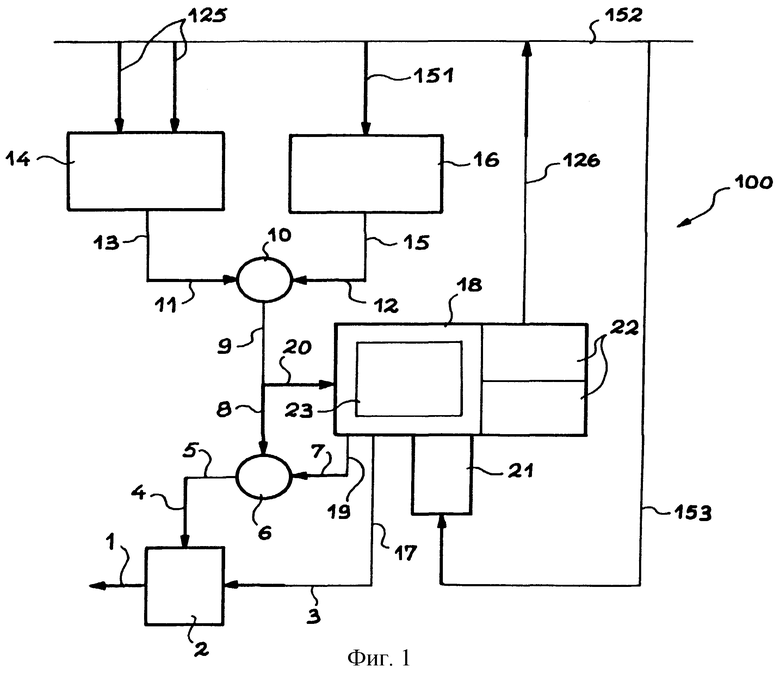
фиг.1 изображает схему конструкции гидравлической части систем отсечки при останове и отсечки при превышении скорости,
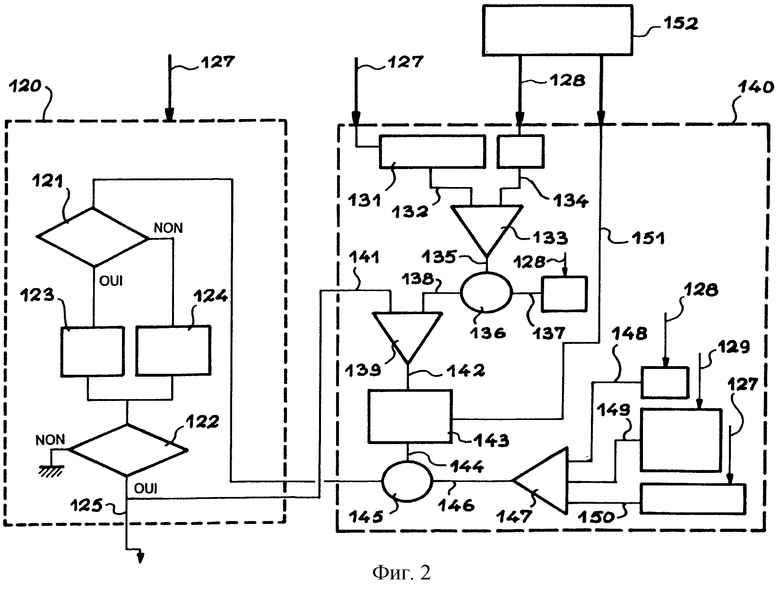
фиг.2 изображает схему конструкции логической части для управления гидравлическим средством, показанным на фиг.1,
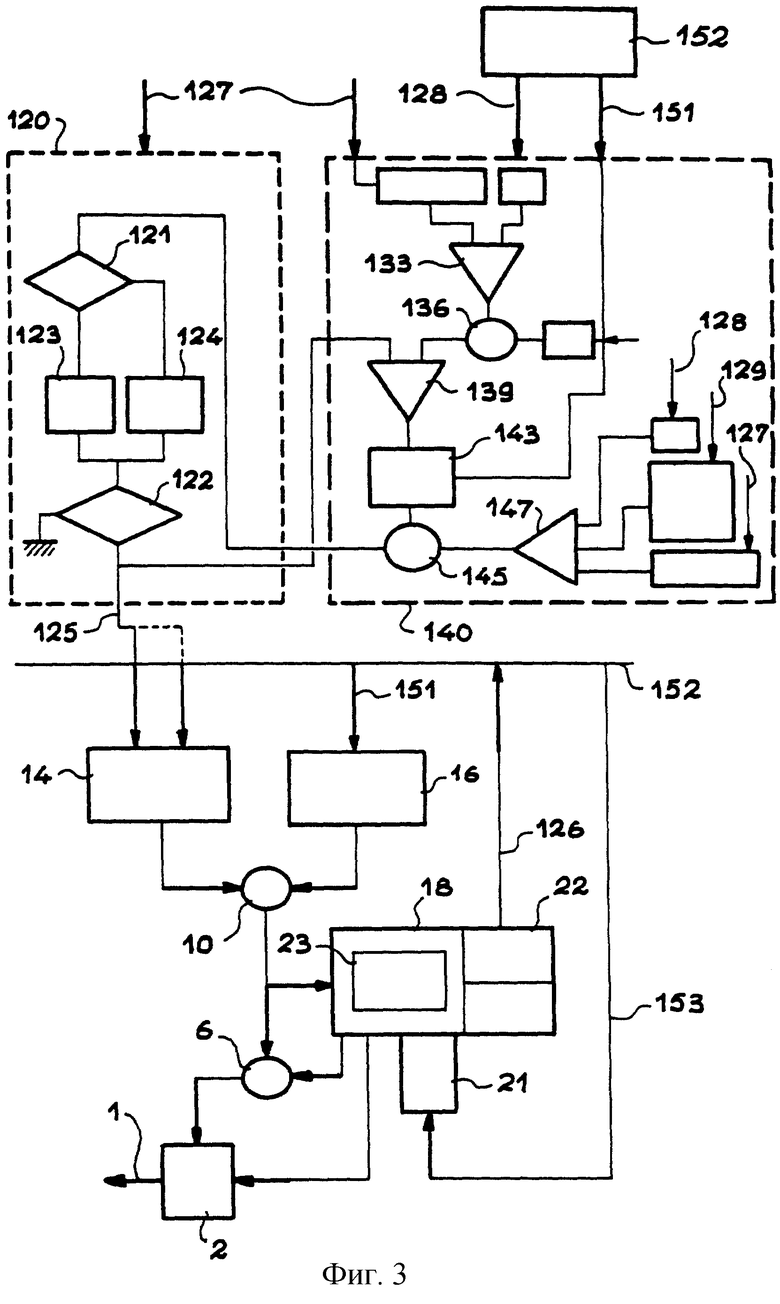
фиг.3 иллюстрирует связи между конструкциями логической и гидравлической части,
фиг.4 иллюстрирует хронологическую последовательность запуска на земле, включающую тестирование системы превышения скорости,
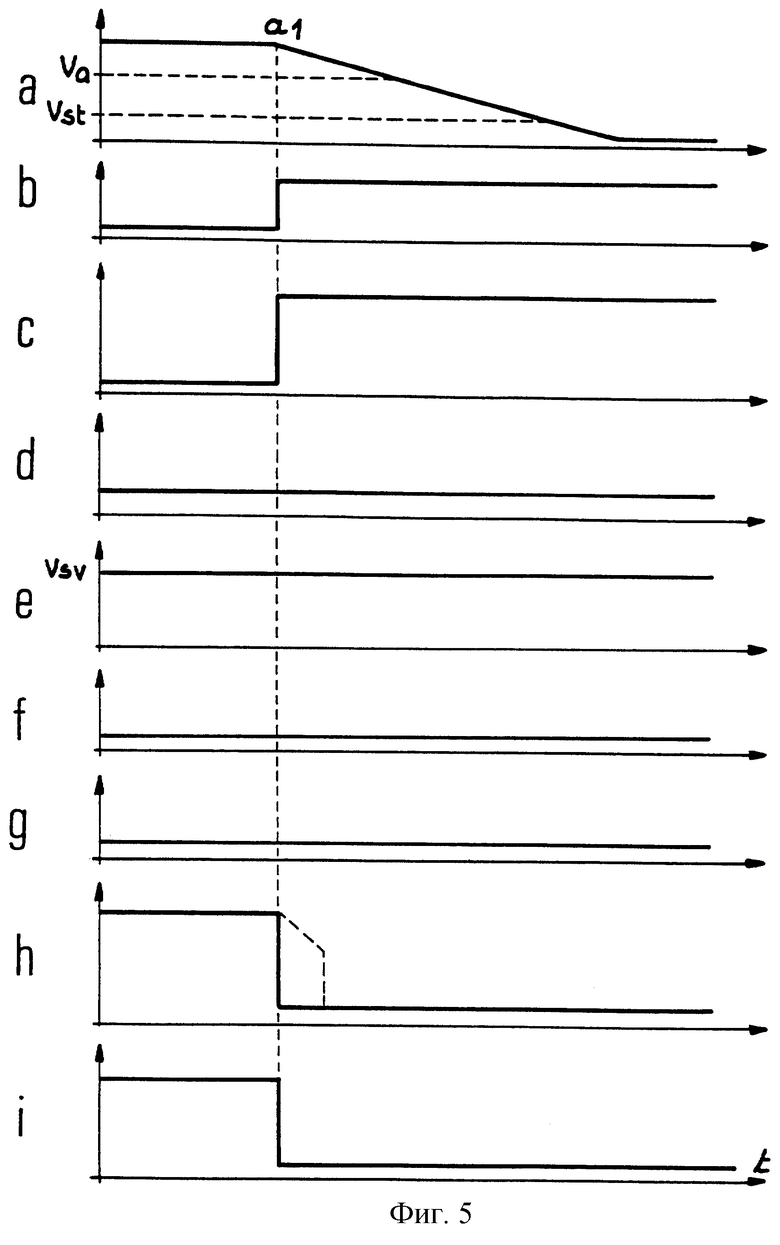
фиг.5 показывает хронологическую последовательность останова на земле, включающую тестирование системы отсечки при останове,
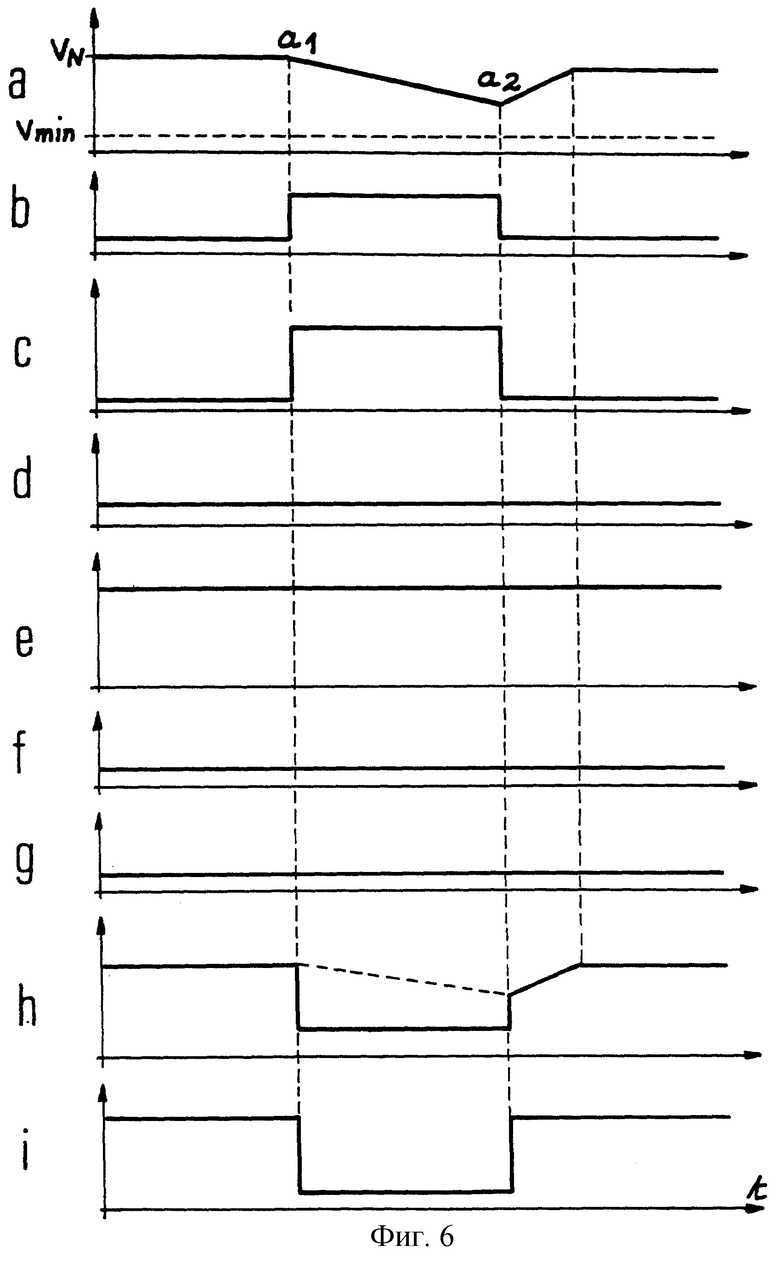
фиг.6 показывает хронологическую последовательность останова в полете, вызванного ошибкой пилота, и повторного запуска без тестирования превышения скорости,
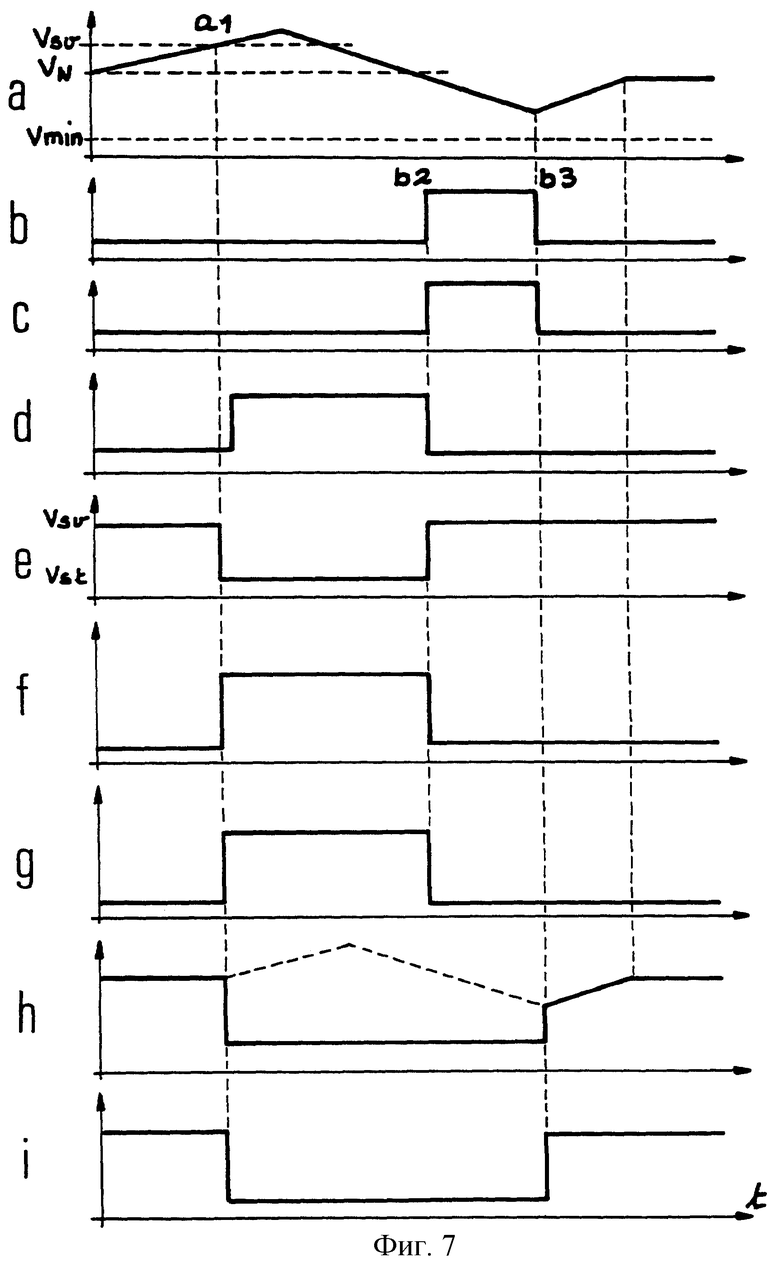
фиг.7 показывает последовательность останова в полете после того, как была отключена защита от превышения скорости, и повторный запуск без тестирования по запросу пилота.
На фиг.1 изображена часть гидравлического узла 100 регулирования горючего, которая поясняет сущность изобретения.
Этот узел регулирует поток горючего WЕ, который посылается в топливные форсунки (не показаны) на выход 1 из отсечного клапана 2. Отсечной клапан имеет два входа, а именно первый вход 3 и второй вход 4. Он работает следующим образом. Когда на входе 4 прикладывается достаточное давление, клапан закрыт. При этом горючее не поступает на выход 1. Если давление подвода горючего на первом входе 3 недостаточное, иными словами ниже минимального порогового значения, отсечной клапан 2 закрывается, и горючее больше не поступает на выход 1. Если давление на первом входе 3 клапана 2 ниже порогового, и горючее не подается на второй вход 4, то весь поток, поступающий на вход 3, направляется на выход 1.
Общая конструкция такого клапана 2, обеспечивающего описанную выше операцию, сама по себе является известной и не будет описана. Между вторым входом 4 в клапан 2 и выходом 5 из первого гидравлического вентиля 6 “или” с двумя входами, первым входом 7 и вторым входом 8, имеется труба. Вентиль “или” 6 направляет горючее, поступающее из любого из двух его входов 7, 8, на свой выход 5. Внутренняя работа такого типа вентиля сама по себе известна и не описывается в данной заявке. Однако следует отметить, что в простейшем виде он может быть простым патрубком.
Второй вход 8 в первый вентиль “или” 6 подсоединен к выходу 9 из второго вентиля “или” 10. Этот второй вентиль “или” 10 имеет два входа, первый 11 и второй 12.
Первый вход 11 подсоединен к выходу 13 из первого электроклапана 14. Как будет упоминаться ниже, этот первый клапан является перекрывающим клапаном для отсечного клапана 2 в случае обнаружения превышения скорости или для тестирования превышения скорости.
Второй вход 12 в гидравлический вентиль “или” 10 подсоединен к выходу 15 из второго электроклапана 16. Как будет поясняться ниже, этот второй клапан является перекрывающим отсечным клапаном.
Первый вход 3 в отсечной клапан 2 подсоединен через трубу к первому выходу 17 из питателя 18 для подачи горючего. Этот первый выход 17 является нормальным выходом из подающего питателя 18, иными словами, выходом, в который поступает поток горючего wЕ в форсунки, если работа протекает в нормальном безопасном режиме. Второй выход 19 из подающего питателя 18 соединен через трубу с первым входом 7 первого гидравлического вентиля “или” 6. Этот второй выход 19 подающего питателя 18 передает сигнал останова в форме давления горючего, когда подающий питатель 18 находится в положении минимального потока.
Положение минимального потока возникает, в частности, из-за того, что логический вход 20 подающего питателя 18, подсоединенный к выходу 9 из второго вентиля “или” 10, принимает входной сигнал в форме давления горючего из выхода 9 второго вентиля “или” 10.
Как известно, подающий питатель 18 содержит пробку 23, схематически изображенный на фиг.1, перемещение которого изменяет площадь поперечного сечения горючего, направляемого на выход 17. Клапан пропорциональности (не показан) поддерживает постоянный дифференциал давления между не показанным на чертеже патрубком подвода горючего под высоким давлением и выходом 17. Кроме того, известным способом регулирующий давление предохранительный клапан (не показан) возвращает поток горючего, превышающий поток WЕ, подаваемый в подающий насос насосом высокого давления.
При нормальной работе сервоклапан 21 перемещает пробку 23, чтобы получить поток горючего WЕ, необходимый для работы двигателя, с учетом команд пилота и внешних параметров. Положение 126 пробки 23 известно благодаря информационному сигналу положения, выданному избыточными датчиками положения 22. Эта информация обрабатывается управляющим устройством, не показанным на чертеже, которое также получает информацию об управлении полетом и его условиях. Это управляющее устройство выдает управляющий сигнал 153 в избыточные сервоклапаны 21, которые управляют положением пробки 23 подающего питателя 18, чтобы адаптировать его к скорости двигателя.
Эта нормальная часть работы и регулирования потока горючего сама по себе известна и не является объектом изобретения. Следует отметить, что изобретение можно использовать для отсечки при останове и отсечки при превышении скорости и для проверки этих двух функций.
Далее со ссылкой на фиг.2 будут описаны логические электронные модули 120 и 140 для регулирования и тестирования узла 100 регулирования горючего для отсечки при останове, отсечки при превышении скорости и для проверки этих функций.
Чтобы облегчить понимание изобретения, отметим, что первым этапом при обычном запуске турбореактивного двигателя является принудительное вращение компрессора и турбины. Когда самолет находится на земле, это вращение запускается с помощью какого-либо приводного механизма, например электронного стартера или вентилятора. Когда самолет находится в полете, относительная скорость воздуха действует как вентилятор. Впрыск и воспламенение горючего начинается только после того, как реактивный двигатель достигнет пороговой скорости вращения, равной Va, если самолет находится на земле, или Vmin, если самолет находится в воздухе, чтобы обеспечить достаточный поток воздуха в турбине. После этого увеличение скорости вращения может продолжаться без внешней помощи благодаря энергии, обеспечиваемой сгоранием горючего.
Далее будет описан модуль 120 тестирования превышения скорости и управления.
В этот модуль вводится значение 127, характеризующее скорость вращения двигателя, например, скорость сцепления N1 при низком давлении, или сцепления N2 при высоком давлении, или любое другое значение, характеризующее скорость вращения двигателя в пределах значений, в которых находится подлежащее обнаружению превышение скорости.
При первой логической операции 120 задается вопрос “Это фаза тестирования превышения скорости?”. Ответ на этот вопрос получают путем проверки переключателя состояния или памяти 143 состояния. В описанном здесь примере положительному ответу соответствует значение 1.
Если ответ положительный, задается следующий вопрос в модуле 122 относительно того, не превышает ли скорость вращения пороговое значение. Ответ на этот вопрос получают посредством сравнения принятого значения 127 действительной скорости вращения с пороговым значением. Если текущая фаза является испытательной, выполняется сравнение в первом модуле 123 сравнения. Пороговая испытательная скорость вращения Vst представляет собой скорость вращения ниже действительного значения Vav, при которой достигается действительное превышение скорости. Эта испытательная скорость согласно изобретению выбирается меньше скорости вращения Vav, начиная с которой разрешается впуск горючего в форсунки, когда самолет находится на земле.
В приведенном здесь примере значение Vat пороговой скорости вращения для данной проверки было зафиксировано на уровне 10% максимальной скорости вращения, разрешенной на земле. Скорость подвода горючего составляет 22% от этого значения.
Если ответ из модуля 121 отрицательный, то текущая фаза не является испытательной, и у модуля 122 запрашивается, не превышает ли скорость вращения пороговое значение. В этом случае выполняется сравнение между действительной скоростью и порогом Vev действительного превышения скорости во втором модуле 124 сравнения.
В приведенном примере значение действительного превышения скорости составляет 107% от максимально допустимого значения с учетом внешних параметров. Аналогичным образом этот пример относится к модулю сравнения, а не к компаратору, так как сравнение выполняется посредством логической операции. Естественно, это может быть аналоговый компаратор. Если ответный выходной сигнал из модуля 122 положительный, что означает, что он выше испытательного или действительного превышения скорости, то в электроклапан 14 гидравлического узла 100 посылается команда 125 открыть этот клапан, и посылается положительный сигнал в вентиль “и” 139, который будет обсуждаться ниже.
Таким образом, видно, что модуль 120 превышения скорости является модулем, в который вводится скорость вращения двигателя. Этот модуль постоянно исполняет программу определения, не превышает ли действительная скорость вращения какой-то порог, которым является порог испытательного превышения скорости или порог действительного превышения скорости, в зависимости от состояния переключателя 123 состояния, который будет описан ниже. Состояние переключателя 123 состояния изменяется между испытательным состоянием, например значением 1, и неиспытательным состоянием, например значением 0. Логический модуль 140 управляет изменением состояний переключателя состояния.
Теперь будет описан логический модуль 140. Этот модуль принимает информацию 127 о скорости вращения, информацию 128 о фазе полета, чтобы определить, находится ли самолет в воздухе или на земле, и информацию 151 о положении рычага управления, например, через шину 152 в формате ARING. Как будет описано ниже, информация 151 используется в качестве управляющего сигнала для отсечки в отсечном электроклапане 16. Первый модуль 131 сравнения логического модуля 140 выполняет сравнение между скоростью 127 и скоростью вращения, начиная с которой можно подводить горючее в форсунки двигателя. Выходной сигнал 132 этого сравнения является первым входным сигналом для первого логического вентиля “и” 133. Второй вход 134 в этот вентиль “и” принимает положительную информацию, когда самолет, на котором установлен двигатель, находится на земле. Вентиль “и” 133 выдает положительный сигнал, например, если скорость вращения двигателя выше, чем порог подвода горючего в форсунки, и если самолет находится на земле. Выходной сигнал 135 из первого вентиля “и” 133 подается в первый логический вентиль “или” 136. Второй вход 137 вентиля “или” 136 принимает положительную информацию, когда самолет находится в полете. Следовательно, выходной сигнал вентиля “или” 138 положительный, если самолет находится на земле и если скорость вращения двигателя выше, чем скорость Va, или же во всех случаях, когда самолет находится в полете. Выходной сигнал 138 первого вентиля “или” 136 является первым входным сигналом во второй вентиль “и” 139. Второй вход 141 вентиля “и” 139 принимает ответ 125 с выхода модуля 122 сравнения. Если этот выходной сигнал положительный, иными словами, если число вращении выше, чем порог действительного превышения скорости или порог испытательного превышения скорости, то выходной сигнал 142 второго вентиля “и” 139 положительный, что изменяет значение переключателя 143 состояния, который уже упоминался во время описания модуля 120. Этот модуль состояния реинициализируется на свое испытательное значение всякий раз, когда включается рычаг управления при положении самолета на земле. Выходной сигнал 144 переключателя состояния поступает на вход второго вентиля “или” 145. На второй вход 146 второго вентиля “или” 145 поступает сигнал с выхода третьего вентиля “и” 147. Этот вентиль “и” имеет три входа 148, 149, 150. Первый вход 148 положительный, если самолет находится на земле. Второй вход 149 положительный, если управление запуском двигателя положительное. Третий вход 150 положительный, если скорость вращения превосходит порог, выше которого можно подводить горючее в форсунки.
Прежде чем приступить к описанию общей работы логических модулей 120, 140 и узла 100 регулирования горючего со ссылками на фиг.3, где показаны эти элементы, нужно отметить следующее:
отсечной клапан 2 закрывается в случае, если
открывается электроклапан 16,
или открывается электроклапан 14 превышения скорости,
или подающий питатель 18 находится в положении минимального останова, называемом сигналом останова.
Электроклапаны 14, 16 являются клапанами моностабильного типа без самоблокировки.
Если один из двух электроклапанов 14, 16 открыт, подающий питатель 18 закрывается при минимальном останове независимо от команды от компьютера, управляемого сервоклапаном 21.
Информацию о состоянии отсечного клапана 2 (открыт/закрыт) получают по положению подающего питатель 18, зафиксированному датчиками 22 положения. Подающий питатель 18 в положении минимального останова означает, что отсечной клапан 2 закрыт, а подающий питатель 18 не в положении минимального останова означает, что отсечной клапан 2 открыт.
В дальнейшем будет описана работа изобретения на фазах отсечки при останове и отсечки при превышении скорости или во время тестирования этих фаз.
С настоящим изобретением связаны следующие четыре основные рабочие последовательности:
- последовательность запуска на земле с тестированием системы превышения скорости,
- последовательность останова с тестированием системы отсечки при останове,
- последовательность останова в полете при ошибке пилота с последующим повторным запуском без тестирования,
- последовательность останова в полете при отключенной защите от превышения скорости с последующим повторным запуском без тестирования по запросу пилота.
Тестирование корректности работы системы защиты от превышения скорости выполняется только при запуске на земле, но не проводится во время повторного запуска в полете. Это необходимо для того, чтобы не усложнять запуск турбореактивного двигателя в полете.
Работа каждой из этих последовательностей будет описана со ссылкой на фиг.3 и на временные диаграммы на фиг.4, 5, 6 и 1, соответственно.
На каждой из этих диаграмм
- линия а представляет изменение скорости вращения двигателя; для описания работы изобретения на разных фазах используются следующие скорости, перечисленные по порядку возрастания:
Vmin - минимальная скорость, необходимая для запуска в полете,
Vst - порог испытательного превышения скорости,
Va - минимальная скорость для разрешения запуска на земле,
Vi - скорость холостого хода,
Vn - скорость при крейсерском полете,
Vsv - порог действительного превышения скорости.
Эти значения скорости запоминаются в памяти или подаются шиной 152 известным образом.
- линия b представляет управление полетом от рычага управления, приводимого в действие пилотом. Следует отметить, что в описанном примере положение “включено” соответствует отсутствию посланного электрического сигнала, представленному нижним положением,
- линия с представляет электроклапан 16 в закрытом при останове положении; это значение высокое, если клапан открыт, и низкое, если он закрыт,
- линия d представляет значение испытательной переменной (1 или 0),
- линия е представляет значение порога обнаружения превышения скорости (действительный порог или испытательный порог),
- линии f, и g представляют, соответственно, значение управляющего сигнала для закрытия электроклапана 14 при превышении скорости и положение электроклапана 14; это значение высокое, если клапан открыт, и низкое, если клапан закрыт,
- линия h представляет положение подающего питателя 18, это положение изменяется между положением, управляемым навигационным компьютером и полученным с использованием сервоклапана 21, и положением минимального останова, управляемым модулями 120 и 140 и полученным с помощью электроклапанов 14 и 16,
- линия i представляет положение отсечного клапана 2 (открыт или закрыт).
Далее будет описана со ссылками на фиг.3 и временную диаграмму на фиг.4 последовательность запуска на земле с тестированием системы останова при превышении скорости.
На линии b в течение первого интервала b1 двигатель находится в покое, а рычаг управления находится в непусковом положении, что, как упоминалось выше, обеспечивает высокий электрический сигнал.
Пилот перемещает рычаг управления в момент b2. Двигатель начинает вращаться. В момент а3, показанный вертикальной штриховой линией на диаграммах для линий а - h, двигатель достигает испытательной пороговой скорости Vst, которая задана для тестирования превышения скорости.
В момент а4, отмеченный второй вертикальной штриховой линией на линиях а - i, двигатель достигает скорости Va, при которой можно подавать горючее в форсунки на земле.
Теперь рассмотрим, как показанная на фиг.3 конструкция ведет себя в эти разные моменты.
В момент b2 изменение состояния рычага управления обуславливает команду 151 внутри логического узла 140, которая инициализирует переключатель 143 состояния на испытательное положение, например, на состояние 1 (линия d). Та же самая команда 151 действует на электроклапан 16 закрытия при останове, перемещая его из исходного открытого положения в закрытое положение (линия с). Ограничительное превышение скорости изменяется на испытательную скорость Vst (линия е). Поскольку переключатель 143 имеет значение 1, в модуле 123 будет выполняться сравнение. Эти разные действия реализуются на линиях d, с и е, соответственно.
Когда двигатель достигает порога испытательного превышения скорости Vst в момент а3, выходной сигнал модуля 122 отключается (линия f) и, например, изменяется на 1. Электроклапан 14 защиты от превышения скорости, который изначально был закрыт (линия g), получает команду “открыт” и открывается (линия g). Это не изменяет положение отсечного клапана 2 через вентили “или” 10 и 6, так как он закрыт. Поэтому он остается закрытым.
Корректность работы системы защиты от превышения скорости проверяется посредством наблюдения, что происходит в положении пробки 23 подающего питателя 18, показанного на линии h.
Подающий питатель 18 принимает установочное положение, соответствующее положению “включено”, когда двигатель достигает испытательного превышения скорости. Это положение показано на h3 горизонтальной штриховой линией.
Открытие электроклапана 14 защиты от превышения скорости действует через вентиль “или” 10 и вход 20 подающего насоса, помещая пробку 23 в положение, которое имеет старшинство над командой компьютера переместить в положение минимального открытия, что вызывает закрытие отсечного клапана 2 через выход 19 из подающего питателя 18 и вентиль “или” 6. Следовательно, если положение, обнаруженное датчиками 22 положения, является установочным положением, посланным компьютером, представленным горизонтальной штриховой линией h3, то будет известно, что в системе останова при превышении скорости имеется отклонение от нормы, и пилот будет информирован об этом. Если система защиты от превышения скорости работает, то датчики 22 положения зарегистрируют положение h3bis, т.е. положение минимального останова.
Когда скорость вращения двигателя достигает скорости запуска Va, а самолет все еще находится на земле, все входные сигналы 148 (самолет на земле), 149 (рычаг управления находится в положении “включено”) и 150 (скорость двигателя выше скорости запуска) будут положительными и, следовательно, выходной сигнал 146 из вентиля “и” 147 будет положительным. Значение переключателя 143 состояния корректируется на 0, линия d, фаза d4. В модуле 121 испытательное значение больше не равно 1, следовательно, результат находится на выходной линии, соответствующей отсутствию ответа из модуля 121. Сравнение превышения скорости выполняется с действительным превышением скорости, а не с испытательной скоростью (линия е). Выходной сигнал из модуля 122 больше не является положительным, и поэтому управляющий сигнал из электроклапана 14 превышения скорости корректируется на 0, линия f, и электроклапан 14 закрывается (линия g).
Когда клапаны 14 и 16 закрыты, пробка 23 подающего питателя 18 возвращается в установочное положение, выданное компьютером в h4 на линии h. Так как пробка 23 больше не находится в положение минимального останова, выходное давление 17 из подающего питателя 18 достаточно для открытия клапана 2, 14 линии i. Так как отсечной клапан открыт, горючее поступает в форсунки.
Таким образом, видно, что при данной конструкции все фазы запуска на земле включают в себя тестирование системы защиты от превышения скорости.
Следует отметить, что во время этого тестирования функция контроля отказа сервоконтроля подающего насоса должна подавляться, в частности, во время фаз h3 и h3bis. Система зашиты от превышения скорости проверяется по разности между установочным значением компьютера и действительным положением подающего насоса, определенным датчиками 22.
Далее со ссылками на фиг.5 будет описана работа устройства, показанного на фиг.3, во время последовательности останова двигателя на земле с тестированием отсечки при останове.
На линии а, когда двигатель вращается со скоростью холостого хода Vr, пилот переводит рычаг управления в положение отсечки двигателей в момент а1, отмеченный направленной вниз штриховой линией на фиг.5.
В это же самое время электрический сигнал самолета на линии b переходит из низкого положения в высокое положение.
На линии с электроклапан 16 отсечки при останове принимает команду 151 “открыть” и открывается.
Значение линии d переключателя 143 состояния не изменяется и остается равным 0, так как выходной сигнал 146 вентиля “и” 147 изменяет значение 1 на 0, не возвращаясь к значению 1. После того, как рычаг управления переведен в положение “выключить”, в вентиль “и” 147 всегда поступает один входной сигнал, не являющийся положительным. При скорости холостого хода скорость вращения Vr превосходит минимальную скорость Va, что позволяет впустить горючее в форсунки. Когда она подает ниже этого уровня, рычаг управления находится в положении “выключено”. При этом в вентиле “и” 133 больше нет изменения состояния.
Следовательно, порог превышения скорости на линии е остается на своем действительном значении. Управляющий сигнал для электроклапана 14 превышения скорости, линия f, а значит, и для положения электроклапана, линия g, не изменяется.
Однако поскольку клапан 16 отсечки при останове открывается, линия с, подающий питатель 18 получает более приоритетное установочное значение, вынуждающее его переместить пробку 23 в положение минимального останова. Это перемещение, зафиксированное датчиками 22, показано сплошной линией h. Оно не является таким же, как смещение, которое было бы уже сделано, если бы положение пробки 23 соответствовало установочному положению, заданному компьютером двигателю. Это установочное положение, соответствующее постепенному уменьшению потока горючего вслед за уменьшением скорости вращения двигателя, показано штриховой линией h.
Разность между этими двумя положениями пробки 23 подающего питателя 18 используется для проверки того, что система отсечки при останове работает корректно.
И, наконец, на линии i, отсечный клапан закрывается в момент а1 в ответ на команду, принятую выходом 17 подающего питателя 18.
Таким образом, можно заметить, что тестирование отсечки при останове выполняется всякий раз, когда двигатель останавливается на земле, и что тестирование превышения скорости выполняется при каждом запуске на земле. Следовательно, больше нет необходимости в выполнении каких-либо конкретных операций при выполнении работ по техническому содержанию для выполнения этих двух тестирований.
Теперь опишем работу устройства, показанного на фиг.3, во время последовательности отсечки в полете, последовавшей в результате ошибки пилота, после которой произошел повторный запуск без тестирования. Временная диаграмма этой последовательности показана на фиг.6.
На линии а двигатель вращается в начале последовательности с крейсерской скоростью вращения Va. В момент а1, например, после ошибки, пилот останавливает двигатель. Скорость вращения двигателя снижается до момента а2, когда пилот принимает решение повторно запустить двигатель.
На линии b электрический сигнал самолета изменяет положение “выключено” перед моментом а1 на положение “включено” после момента а1, а затем снова на положение “выключено” после момента а2.
На линии с положение электроклапана 16 отсечки при останове изменяется под действием последовательных команд, принятых в моменты а1 и а2, изменяя закрытое положение на открытое в момент а1, а затем на закрытое положение в момент а2.
Как и в предыдущей последовательности и по той же самой причине не происходит изменений на линии d переключателя состояния порога обнаружения превышения скорости, линии е сигнала управления и положения электроклапана 14 отсечки при превышении скорости или на линиях f и g.
Начиная с момента а1, сервоклапан 21 больше не управляет положением пробки 23, так как благодаря открытию электроклапана 16 отсечки при останове, пробка 23 перемещается в положение минимального останова, что приводит к закрытию отсечного клапана 2, линия i. Положение пробки 23 подающего питателя 18, линия h, в ответ на установочное значение компьютера показано штриховой линией, оно зависит от действительной скорости вращения двигателя. В момент а2 из-за закрытия электроклапана 16 отсечки при останове, линия с, сервоклапан 21 возобновляет управление положением пробки 23 подающего питателя 18, в результате чего открывается отсечной клапан 2, линия i.
Теперь опишем со ссылками на фиг.7 работу последовательности останова двигателя в полете после отключения защиты от превышения скорости, за которым следует повторный запуск без тестирования по запросу пилота.
Сначала допустим, что по какой-либо причине в момент а1, линия а, скорость вращения достигает порога превышения скорости. В модуле 120 ответ на вопрос “N2 > порога?” в модуле 122 сравнения становится положительным, посылается команда 125 “открыть” в электроклапан 14 превышения скорости, и он изменяет свое закрытое положение на открытое положение, линии f и g; пробка 23 подающего питателя 18, линия h, перемещается в положение минимального останова и поэтому отсечной клапан 2, линия i, изменяет свое открытое положение на закрытое положение. Положение, которое пробка 23 подающего питателя 18, линия h, занимал бы в ответ на установочные значения компьютера, показано штриховой линией, это функция действительной скорости вращения двигателя. Двигатель больше не получает горючее, и поэтому скорость вращения падает после перехода через максимум, линия а.
Тот факт, что ответ на вопрос "N2 > порога?" в модуле 122 положительный, также обеспечивает положительный сигнал на входе 141 вентиля “и” 139. Поскольку самолет находится в полете, положительный сигнал также принимается на втором входе 138 через вентиль “или” 136 и его вход 137. Переключатель состояния, линия d, затем изменяет в момент а1 свое состояние 0 на 1. Соответственно, порог определения превышения скорости корректирует свое значение действительного превышения скорости на значение испытательного превышения скорости. Следовательно, двигатель не запускается снова, даже если скорость вращения двигателя опять упадет в результате перекрытия подвода горючего до скорости, которая будет ниже, чем порог превышения скорости.
Повторный запуск двигателя требует двух действий пилота. Во-первых, он должен выключить двигатель, переместив рычаг управления, и во-вторых, он должен дать команду запустить двигатель посредством повторного перемещения рычага управления.
Теперь допустим, что эти две операции выполняются соответственно в моменты b2 и b3, линия b.
В инструкциях пилота предписано, что повторный запуск двигателя в полете разрешен только в том случае, если скорость вращения превышает порог Vmin. Этот порог является скоростью, начиная с которой можно подавать горючее в форсунки, находясь в полете.
Эта пороговая скорость составляет около 6% полной скорости вращения, допустимой для текущих условий полета.
В момент b2 отсечка двигателя приводит к тому, что электрические сигналы самолета изменяют положение “выключено” на положение “включено”, линия с. В результате этого электроклапан 16 отсечки при останове принимает команду 151 “открыть” и открывается (линия с). Переключатель 142 состояния, приняв команду 151, реинициализируется и изменяет положение 1 на положение 0 (линия d). В результате модуль 121 сравнения порога превышения скорости возвращается к действительному превышению скорости, линия е. Поэтому скорость вращения падает ниже этого порога, выходной сигнал модуля 122 становится отрицательным и электроклапан 14 превышения скорости принимает сигнал “закрыть”, линия f, и переходит в закрытое положение, линия g. В результате положение пробки 23 подающего питателя 18 не изменяется, и он остается в положении минимального останова, линия h, так как электроклапан 16 отсечки при останове открыт. Соответственно, то же самое касается и положения отсечного клапана 2, который остается закрытым, линия i.
Таким образом, перемещение рычага управления имеет эффект реинициализации положения элементов 14, 16, 18, 20 системы, с помещением их в нормальное закрытое положение для двигателя, то же самое касается логических элементов 121, 123, 124 и 143.
В момент b2 пилот снова расцепляет положение рычага управления. В результате электрический сигнал самолета, линия b, изменяет положение “включено” на “выключено”. Команда 151, принятая электроклапаном 16 отсечки при останове, закрывает этот клапан, линия с.
Переключатель 143 состояния, линия d, не изменяет положение, так как вентиль “и” 139 не принял два положительных входных сигнала. Первый сигнал 138 положительный, так как самолет был в полете, и эта информация передается через вентиль “или” 136, который принимает эту информацию на свой первый вход 137. Но второй входной сигнал 141, принятый от модуля 122, отрицательный, так как скорость вращения двигателя меньше, чем пороговая скорость.
Следовательно, порог обнаружения превышения скорости, линия е, не изменяется и остается зафиксированным на действительном превышении скорости (линия е). Командный сигнал от электроклапана 14 превышения скорости не изменяется, линия f, так же, как и положение этого электроклапана, линия g, которое остается закрытым.
Так как клапаны 14 и 16 теперь закрыты, пробка 23 подающего питателя 18 покидает положение минимального останова и возвращается в установочное положение, управляемое сервоклапанами 21, линия h. В результате отсечной клапан 2, линия 1, открывается и горючее снова воспламеняется в форсунках, линия i. Скорость вращения двигателя возвращается на свой нормальный уровень, линия а.
В заключение следует сказать, что модуль 140 управляет переключателем состояния с избыточностью, приводят его в испытательное состояние, если
самолет находится на земле и управление воспламенением находится в положение “включено”,
если же самолет находится в полете и превышен порог действительного превышения скорости, модуль 140 переводит переключатель состояния в его нормальное состояние,
при нахождении самолета на земле и положении “включено” управления воспламенением скорость вращения двигателя возрастает выше скорости Va, начиная с которой можно подавать горючее в форсунки, причем скорость Va выше, чем порог Vst испытательного превышения скорости, а если самолет был в полете и переключатель состояния был в испытательном состоянии после превышения скорости, то управление 151 воспламенением переключается из положения “включено” в положение “выключено”.
Следует отметить, что при этих тестированиях корректность работы проверяется по разности между расчетным положением пробки 23 подающего питателя 18 и реальным положением в положении минимального останова, зафиксированным датчиками 22. Эта разность обрабатывается, как это известно специалистам в данной области, и может отображаться или обрабатываться навигационным компьютером или компьютером двигателя. Такой способ проверки удовлетворительной работы отвечает стремлению модифицировать минимальное количество существующих элементов оборудования для получения желаемого результата. При этом используются датчики 22 положения и вычисленное положение пробки 23 подающего питателя 18. Однако тот же самый результат можно было бы получить на основании сигнала, исходящего непосредственно из отсечного клапана 2 и индицирующего, открыт или закрыт этот клапан.

Изобретение относится к области устройств для отсечки при останове и отсечки при превышении допустимой скорости для турбореактивного двигателя и средств для тестирования этих двух режимов отсечки. Гидравлический узел управления горючим для авиационного двигателя содержит средства для управления отсечкой потока горючего, передаваемого с выхода в форсунки двигателя, при останове и при превышении скорости. Логический модуль управляет положением переключателя состояния в испытательном положении или нормальном положении. Модулем состояния управляют таким образом, что можно проверять работу модуля превышения скорости при каждом запуске системы на земле. Конструкция гидравлического узла такова, что работу отсечки при останове можно проверять во время каждой посадки. Корректность работы при тестировании превышения скорости и тестировании отсечки при останове анализируют посредством определения разности между управляющим значением допустимого потока горючего, который зависит в основном от скорости двигателя, и значением действительного потока, зарегистрированным датчиками. Таким образом, комбинация конструкции гидромеханического регулятора горючего с конструкцией электронной системы обеспечивает средство автоматической и полной проверки того, что эти две системы работают корректно. 3 н. и 6 з.п. ф-лы, 7 ил.
| US 4493187 А, 15.01.1985 | |||
| US 4602479 А, 29.07.1986 | |||
| US 4716723 А, 05.01.1988 | |||
| Устройство ограничения частоты вращения двигателя | 1982 |
|
SU1016548A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОТКЛОНЕНИЯ ПАРАМЕТРОВ В ГАЗОВЫХ ТУРБИНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1995 |
|
RU2168044C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ХАРАКТЕРИСТИК И ДИАГНОСТИКИ СОСТОЯНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2040699C1 |
| СИСТЕМА ТОПЛИВОПИТАНИЯ И РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2022143C1 |
| Устройство для автоматического экстренного торможения двересъемной машины коксовых печей | 1951 |
|
SU95434A1 |
| DE 3926707 А1, 28.06.1990 | |||
| US 5142860 А, 01.09.1992. | |||

