Область техники
Настоящее изобретение относится к способу управления инструментами, предназначенными для обеспечения приложения вращающего момента к резьбовому элементу, такому как болт и гайка, включая приводимые вручную гайковерты, такие как ударный гайковерт, импульсный гайковерт и ручные гайковерты, при затягивании или отвинчивании болта и гайки при помощи инструмента.
Уровень техники
Когда работа по затягиванию резьбы для затягивания множества резьбовых элементов, таких как болты и гайки, выполняется на автомобильном заводе и т.п., существует необходимость затягивания всех резьбовых элементов одинаковым вращающим моментом на резьбовом соединении. Для того чтобы обеспечить эту необходимость, был разработан ручной ударный гайковерт, как описано в японской патентной публикации №Hei 6-16990, который выполнен так, что вращающийся элемент, который вращается с ведущим валом, приводится во вращение вокруг ведомого вала таким образом, чтобы вращающий момент вращающегося элемента передавался к ведомому валу через кулачковый молот для затягивания резьбового элемента и чтобы угол затягивания резьбы (угол завинчивания) резьбового элемента детектировался вращающимся детектирующим элементом, вращаемым вместе с ведущим валом и детектирующим датчиком, расположенным на не вращающейся части корпуса гайковерта.
В этом типе ручного ударного гайковерта для детектирования угла затягивания резьбы резьбового элемента с помощью вращающегося детектирующего элемента и детектирующего датчика определяется число импульсов R1, генерируемых, когда вращающийся элемент вращается обратно в противоположном направлении вращения после столкновения с ведомым валом через кулачковый молот, и определяется число импульсов F1, генерируемых в течение времени, когда вращающийся элемент вращается свободно в нормальном направлении вращения после обратного вращения до тех пор, пока он снова не столкнется с ведомым валом, для приложения к нему ударной силы. Из этого числа импульсов R1 и F1 определяется число θ1 импульсов, эквивалентное углу завинчивания резьбы при ударе. Для ударного гайковерта, в котором вращающийся элемент обеспечивает один удар за один его оборот, число θ1 импульсов рассчитывается с помощью следующего уравнения:
θ1 = F1 - (число импульсов, эквивалентное 360°) - R1(1)
Затем число импульсов, эквивалентное углу завинчивания, рассчитывается и преобразуется в угол каждый раз, когда осуществляется удар. Когда совокупный суммарный угол достигает заданного угла затягивания резьбы, ведущий вал останавливается.
С другой стороны, для того, чтобы уменьшить звук удара, который является одной из проблем для ударного гайковерта вышеупомянутого типа, был разработан импульсный гайковерт, как тип приводимого вручную гайковерта, который выполнен так, что вращающий момент вращающегося элемента передается к ведомому валу при помощи масляных средств.
Однако в способе управления затягиванием резьбы приводимого вручную гайковерта обычного типа, поскольку детектируется число импульсов при обратном вращении и число импульсов при нормальном вращении, а затем из уравнения (1) определяется число импульсов θ1, эквивалентное углу завинчивания резьбы, с использованием детектированного числа импульсов, если биение, как будет упомянуто позже, создается действием рабочего, использующего ударный гайковерт в процессе затягивания резьбового элемента, помещенного на несущей поверхности под заданным углом затягивания резьбы, то угол биения детектируется и рассматривается датчиком детектирования, расположенным на боковой стороне корпуса гайковерта, как большая ошибка по углу затягивания резьбы. Вследствие этого способ управления затягиванием резьбы при помощи приводимого вручную гайковерта не получил широкого применения.
Следует отметить, что термин "биение", упомянутый в описании, относится к тем следующим различным типам движений:
1. Движение, при котором центр нити резьбы резьбового элемента не перемещается или перемещается линейно, а приводимый вручную гайковерт поворачивается относительно центра нити резьбы;
2. Движение, при котором резьбовой элемент поворачивается вокруг точки, отличной от центра нити резьбы резьбового элемента (например, болта крепления автомобильного колеса), и также заставляет приводимый вручную гайковерт перемещается параллельно;
3. Движение, при котором резьбовой элемент поворачивается вокруг точки, отличной от центра нити резьбы резьбового элемента, а приводимый вручную гайковерт поворачивается относительно центра нити резьбы.
Однако движение, при котором центр нити резьбы резьбового элемента перемешается линейно и также заставляет приводимый вручную гайковерт двигаться параллельно, в описании не включается в определение биения.
Следует отметить, что не было предложено никаких адекватных путей управления отвинчиванием и также затягиванием резьбы.
Это может вызывать следующие проблемы. Например, когда гайка чрезмерно отвинчивается в направлении отвинчивания резьбы, она может выпасть из болта на пол или на землю, в гайку попадет песок, так что когда гайка позже будет затянута, она не может быть затянута правильно. Кроме того, когда гайка отвинчивается мощным инструментом слишком слабо, чтобы затем ее отвинчивали вручную, для ее отвинчивания снова должен использоваться какой-то инструмент, что приводит к снижению технологичности.
Кроме того, когда гайка отвинчивается чрезмерно в верхнем местоположении, она может упасть с болта и причинить опасность человеку, находящемуся под этим местом.
Поэтому было использовано знание того факта, что, поскольку время импульса, которое фактически обеспечивается, является очень коротким (порядка миллисекунд), то угол биения, который может образоваться в течение такого очень короткого времени, не может помочь, но является очень ограниченным или малым, и благодаря такому знанию был создан способ настоящего изобретения для обеспечения возможности измерения угла завинчивания с необходимой и достаточной точностью даже тогда, когда вызывается некоторое биение. Также был создан способ управления затягиванием резьбы и способ управления отвинчиванием резьбы.
Также был создан способ проверки степени ошибки, вошедшей в результаты измерения, вызванной биением, для оценки затягивания резьбы на основе степени биения.
Сущность изобретения
Настоящее изобретение относится к способу считывания угла завинчивания приводимого вручную гайковерта, содержащего вращающийся элемент, который после свободного вращения начинает замедляться, когда он обеспечивает действие ударной силы или вращающего момента на сторону ведомого вала и, после окончания замедления совершает обратное вращение и снова вращается свободно, при этом угол вращения, полученный в течение всего замедления вращающегося элемента в направлении затягивания резьбы от начала замедления до конца замедления, обеспечивается таким образом, чтобы, когда полная сумма полученного угла вращения достигнет заданного угла, обеспечивается управляемое прекращение затягивания резьбы.
Настоящее изобретение относится к способу считывания угла вращения приводимого вручную гайковерта, содержащего вращающийся элемент, который после свободного вращения начинает замедляться, когда он обеспечивает действие ударной силы или вращающего момента на сторону ведомого вала, и, после окончания замедления снова вращается свободно, при этом угол вращения, полученный посредством вычитания некоторого угла из угла вращения, полученного в течение всего замедления вращающегося элемента в направлении затягивания резьбы от начала замедления до конца замедления, обеспечивается таким образом, чтобы, когда полная сумма полученного угла достигнет заданного угла, обеспечивается управляемое прекращение затягивания резьбы.
Также, настоящее изобретение относится к способу управления приводимым вручную гайковертом, содержащим вращающийся элемент, который после свободного вращения начинает замедляться, когда он обеспечивает действие ударной силы или вращающего момента на сторону ведомого вала и, после окончания замедления совершает обратное вращение и снова вращается свободно, при этом обеспечивается детектирующее средство для детектирования изменения скорости вращения или частоты вращения вращающегося элемента и его угла вращения, в котором на основе изменения скорости вращения и угла вращения, детектируемых детектирующим средством, угол, полученный посредством вычитания суммарного угла вращения в направлении обратного вращения из суммарного угла вращения в направлении затягивания, детектируется и обеспечивается как суммарный угол вращения (Р), а угол вращения, полученный при ударе в течение замедления, детектируется и накапливается как ΔН, а предварительно установленный запроектированный ударный угол, соответствующий числу ударов, обеспечиваемых до конца работы затягивания, обеспечивается как Pd, причем угол биения рассчитывается из следующего уравнения:
Угол биения=Р - совокупный суммарный Pd - совокупный суммарный ΔН,
где Pd - запроектированное значение приводимого вручную гайковерта, показывающее угол, соответствующий 360°/m для случая числа m ударов за один оборот вращающегося элемента.
Кроме того, настоящее изобретение относится к способу детектирования биения при управляемом затягивании приводимым вручную гайковертом, содержащим вращающийся элемент, который после свободного вращения начинает замедляться, когда он обеспечивает действие ударной силы на сторону ведомого вала и, после окончания замедления снова вращается свободно без обратного вращения, при этом обеспечивается детектирующее средство для детектирования изменения скорости вращения вращающегося элемента и его угла вращения, в котором на основе изменения скорости вращения и угла вращения, детектируемых детектирующим средством, совокупный суммарный угол вращения в направлении затягивания резьбы детектируется и обеспечивается как суммарный угол вращения (Р), а угол, полученный вычитанием некоторого угла из угла вращения, полученный при замедлении, детектируется и обеспечивается как ΔG, и обеспечивается предварительно установленный запроектированный угол Pd удара, соответствующий числу ударов, обеспеченных до окончания работы затягивания, причем угол биения вычисляется из следующего уравнения:
Угол биения=Р - совокупный суммарный Pd - совокупный суммарный ΔG,
где Pd - запроектированное значение приводимого вручную гайковерта, показывающее угол, соответствующий 360°/m для случая числа m ударов за один оборот вращающегося элемента.
Настоящее изобретение относится к способу определения надежности затягивания приводимого вручную гайковерта путем сравнения угла биения, полученного вышеупомянутым способом детектирования биения, с предварительно установленным допустимым углом.
Настоящее изобретение относится к способу управления приводимого вручную отвинчивающего инструмента, содержащего вращающийся элемент, который после свободного вращения в направлении отвинчивания резьбы начинает замедляться, когда он обеспечивает действие ударной силы на сторону ведомого вала, и после окончания замедления снова начинает свободно вращаться в направлении отвинчивания после обратного вращения или без последнего, при этом угол вращения ведомого вала в направлении отвинчивания при работе отвинчивания резьбы обеспечивается таким образом, чтобы, когда полная сумма накопленного угла вращения достигнет предварительно установленного угла, вращение ведомого вала в направлении отвинчивания управляемо прекращается.
Также настоящее изобретение относится к способу управления управляемого вручную отвинчивающего инструмента, содержащего вращающийся элемент, который после свободного вращения в направлении отвинчивания резьбы начинает замедляться, когда он обеспечивает действие ударной силы на сторону ведомого вала и, после окончания замедления начинает снова свободно вращаться в направлении отвинчивания после обратного вращения или без него, при этом обеспечивается детектирующее средство для детектирования изменения скорости вращения вращающегося элемента и его угла вращения, в котором на основе изменения скорости вращения и угла вращения, детектируемых детектирующим средством, угол вращения вращающегося элемента в направлении отвинчивания, полученный в процессе замедления от начала до окончания замедления, или угол, полученный вычитанием некоторого угла из угла вращения, полученного в течение всего замедления вращающегося элемента, обеспечивается таким образом, чтобы, когда полная сумма полученного угла достигнет предварительно установленного угла, вращение ведомого вала в направлении отвинчивания управляемо прекращается.
Кроме того, настоящее изобретение относится к способу управления управляемого вручную отвинчивающего инструмента, содержащим вращающийся элемент, который после свободного вращения в направлении отвинчивания начинает замедляться, когда он обеспечивает действие ударной силы на сторону ведомого вала, и после окончания замедления снова начинает свободно вращаться в направлении отвинчивания после обратного вращения или без него, при этом обеспечивается детектирующее средство для детектирования изменения скорости вращения вращающегося элемента и его угла вращения, в котором генерация удара детектируется детектирующим средством, так, что в случае управляемого вручную отвинчивающего инструмента, в котором обратное вращение генерируется после окончания замедления, когда вращающийся элемент снова начинает свободно вращаться без обратного вращения после того, как детектируется генерация удара, или когда вращающийся элемент начинает снова свободно вращаться без уменьшения до нуля его скорости вращения, вращение ведомого вала в направлении отвинчивания управляемо прекращается, когда вращающийся элемент непрерывно поворачивается на заданный предварительно установленный угол отвинчивания или на больший угол, тогда как, с другой стороны, в случае управляемого вручную отвинчивающего инструмента, в котором обратное вращение не генерируется после окончания замедления, вращение ведомого вала в направлении отвинчивания управляемо прекращается, когда вращающийся элемент непрерывно поворачивается на заданный предварительно установленный угол отвинчивания резьбы или на больший угол, без уменьшения его скорости вращения в направлении отвинчивания резьбы после окончания замедления ниже порогового значения после того, как детектируются генерация удара, а также чтобы предотвратить чрезмерное отвинчивание резьбового элемента.
Далее, настоящее изобретение относится к способу управления управляемым вручную отвинчивающим инструментом, в котором вращающий момент, генерируемый средством генерации вращающего момента, прикладывается к ведомому валу посредством механизма передачи вращающего момента, для того, чтобы привести во вращение ведомый вал в направлении отвинчивания резьбы, так, чтобы отвинчивать резьбовой элемент, в котором обеспечивается средство детектирования вращающего момента для детектирования вращающего момента вращательной нагрузки, необходимого для того, чтобы ведомый вал вращался в направлении отвинчивания резьбы, так, чтобы, когда вращающий момент вращательной нагрузки, детектируемый средством детектирования вращающего момента, уменьшится ниже предварительно установленного вращающего момента, вращение ведомого вала в направлении отвинчивания могло управляемо прекращается.
Следует отметить, что механизмы передачи вращающего момента, которые могут быть использованы, включают механизм для мгновенной передачи вращающего момента ударом, механизм для статической передачи вращающего момента, такой как гайковерт, использующий по меньшей мере один редуктор (включая планетарную зубчатую передачу, коническую зубчатую передачу, червячную зубчатую передачу и другой механизм редукции), а также имеющие оба вышеупомянутых механизма передачи, в которых используется как ударный механизм, так и механизм статической передачи вращающего момента.
Ручные ударные инструменты отвинчивания резьбы, которые могут использоваться, включают инструменты, используемые как для отвинчивания резьбы, также как и для затягивания резьбы, а также инструменты, используемые исключительно для отвинчивания резьбы.
Процесс обеспечения угла вращения ведомого вала включает процесс обеспечения угла вращения в механизме передачи вращающего момента при вращении ведомого вала, а также процесс обеспечения угла вращения в средстве генерации вращающего момента.
Также, процесс остановки ведомого вала включает процесс остановки механизма передачи вращающего момента, а также процесс остановки средства генерации вращающего момента.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его воплощения со ссылками на чертежи, на которых:
фиг.1 изображает вид сбоку в вертикальном разрезе ударного гайковерта, используемого в варианте воплощения настоящего изобретения,
фиг.2 изображает вид спереди и в вертикальном разрезе основной части фиг.1,
фиг.3 изображает вид спереди и в вертикальном разрезе механизма передачи ударной силы, имеющего ударную ступицу и блок упорного стержня,
фиг.4 изображает вид спереди и в вертикальном разрезе часть кулачковой пластинки, предназначенной для того, чтобы активизировать блок упорного стержня,
фиг.5 изображает вид спереди и в вертикальном разрезе механизма передачи ударной силы, который находится в состоянии свободного вращения,
фиг.6 изображает схему, иллюстрирующую рабочее состояние кулачковой пластинки,
фиг.7 изображает вид спереди и в вертикальном разрезе механизма передачи ударной силы во время удара;
фиг.8 изображает вид спереди и в вертикальном разрезе механизма передачи ударной силы во время отвинчивания,
фиг.9 представляет иллюстрацию, иллюстрирующую скорость цилиндрического вращающегося элемента с ударной ступицей, который находится в состоянии свободного вращения,
фиг.10 представляет иллюстрацию, иллюстрирующую скорость цилиндрического вращающегося элемента в момент начала удара,
фиг.11 представляет иллюстрацию, иллюстрирующую скорость цилиндрического вращающегося элемента во время затягивания резьбового элемента,
фиг.12 представляет иллюстрацию, иллюстрирующую скорость цилиндрического вращающегося элемента во время отвинчивания,
фиг.13 представляет иллюстрацию, иллюстрирующую скорость цилиндрического вращающегося элемента снова во время свободного вращения,
фиг.14 представляет иллюстрацию, иллюстрирующую угол цилиндрического вращающегося элемента во время затягивания резьбового элемента,
фиг.15 изображает зависимость отношения между функционированием цилиндрического вращающегося элемента и импульсными сигналами,
фиг.16 изображает график зависимости скорости в другом способе детектирования,
фиг.17 изображает схему, показывающую состояние вращения цилиндрического вращающегося элемента,
фиг.18 представляет иллюстрацию, иллюстрирующую структуру импульсного гайковерта, используемого в варианте воплощения настоящего изобретения,
фиг.19 изображает разрез основной части такого же импульсного гайковерта,
фиг.20 изображает график, иллюстрирующий функционирование этого же импульсного гайковерта,
фиг.21 изображает иллюстрацию с разрезом основной части этого же импульсного гайковерта,
фиг.22 изображает график, иллюстрирующий функционирование этого же импульсного гайковерта,
фиг.23 изображает диаграмму, показывающую состояние вращения ведомого вала и масляного цилиндра этого же импульсного гайковерта,
фиг.24 представляет иллюстрацию, иллюстрирующую детектирование угла затягивания резьбы этого же импульсного гайковерта,
фиг.25 представляет иллюстрацию, иллюстрирующую детектирование угла затягивания резьбы этого же импульсного гайковерта,
фиг.26 представляет иллюстрацию, иллюстрирующую детектирование угла затягивания резьбы этого же импульсного гайковерта,
фиг.27 представляет иллюстрацию, иллюстрирующую детектирование угла затягивания резьбы этого же импульсного гайковерта,
фиг.28 представляет иллюстрацию, иллюстрирующую детектирование угла затягивания резьбы этого же импульсного гайковерта,
фиг.29 представляет иллюстрацию, иллюстрирующую детектирование угла затягивания резьбы этого же импульсного гайковерта,
фиг.30 представляет иллюстрацию, иллюстрирующую детектирование угла затягивания резьбы этого же импульсного гайковерта,
фиг.31 представляет иллюстрацию, иллюстрирующую детектирование угла затягивания резьбы этого же импульсного гайковерта в другом способе,
фиг.32 представляет иллюстрацию, иллюстрирующую детектирование угла затягивания резьбы этого же импульсного гайковерта в другом способе,
фиг.33 изображает график зависимости скорости в способе детектирования биения в ударном гайковерте,
фиг.34 изображает график зависимости скорости в способе детектирования биения в импульсном гайковерте,
фиг.35 изображает вид спереди и в вертикальном разрезе механизма передачи ударной силы ударного гайковерта, который находится в состоянии свободного вращения,
фиг.36 изображает диаграмму, иллюстрирующую рабочее состояние кулачковой пластинки,
фиг.37 изображает вид спереди и в вертикальном разрезе механизма передачи ударной силы во время удара,
фиг.38 изображает вид спереди и в вертикальном разрезе механизма передачи ударной силы во время обратного вращения,
фиг.39 представляет иллюстрацию, иллюстрирующую тот же самый механизм, который находится в состоянии свободного вращения,
фиг.40 представляет иллюстрацию, иллюстрирующую тот же самый механизм в момент начала удара,
фиг.41 представляет иллюстрацию, иллюстрирующую тот же самый механизм во время отвинчивания резьбового элемента,
фиг.42 представляет иллюстрацию, иллюстрирующую тот же самый механизм во время обратного вращения,
фиг.43 представляет иллюстрацию, иллюстрирующую скорость тот же самого механизма снова во время свободного вращения,
фиг.44 представляет иллюстрацию, иллюстрирующую тот же самый во механизм во время отвинчивания резьбового элемента,
фиг.45 изображает график зависимости между функционированием цилиндрического вращающегося элемента и импульсными сигналами в системе управления отвинчиванием резьбы,
фиг.46 изображает иллюстрацию управления отвинчиванием резьбы в ударном гайковерте,
фиг.47 изображает иллюстрацию управления отвинчиванием резьбы в импульсном гайковерте во время генерации удара,
фиг.48 изображает иллюстрацию управления отвинчиванием резьбы в импульсном гайковерте во время отвинчивания резьбы,
фиг.49 изображает график зависимости скорости вращения масляного цилиндра при управлении отвинчиванием резьбы в импульсном гайковерте,
фиг.50 изображает диаграмму, показывающую состояние вращения ведомого вала и масляного цилиндра импульсного гайковерта,
фиг.51 изображает иллюстрацию управления отвинчиванием резьбы в импульсном гайковерте,
фиг.52 изображает иллюстрацию другой формы установки элемента детектирования вращения,
фиг.53 изображает иллюстрацию рабочего гайковерта, имеющего несущий механизм для компенсации силы отдачи,
фиг.54 изображает график зависимости между функционированием двигателя и импульсными сигналами,
фиг.55 изображает иллюстрацию рабочего гайковерта, не имеющего несущего механизма для компенсации силы отдачи,
фиг.56 изображает иллюстрацию управления отвинчиванием резьбы в гайковерте, и
фиг.57 изображает иллюстрацию другого типа детектирующей части импульсов.
Подробное описание предпочтительных вариантов воплощения
Далее будет подробно описан ручной ударный гайковерт, используемый в варианте воплощения настоящего изобретения со ссылкой на сопровождающие чертежи.
Фиг.1 изображает вертикальный разрез основной части ударного гайковерта, выполненного с возможностью осуществления обратного вращения при ударе, который является примером ручного ударного гайковерта, используемого в настоящем изобретении. Следует отметить, что все нижеупомянутые ударные гайковерты и рабочие гайковерты, включая ударный гайковерт и импульсный гайковерт, являются гайковертами ручного типа.
На данной схеме, ссылочный номер 1 обозначает ударный гайковерт, используемый в настоящем изобретении. Ссылочный номер 2 обозначает пневматический двигатель, расположенный внутри корпуса 1б зажимной части 1а задней части внизу ударного гайковерта 1. Ссылочный номер 3 обозначает ведущий вал пневматического двигателя 2. Ссылочный номер 4 обозначает цилиндрический вращающийся элемент, интегрально соединенный с передним концом ведущего вала 3. Дисковидная панель 4а задней стенки цилиндрического вращающегося элемента интегрально соединена с ведущим валом 3 в его центре посредством переходной конструкции, содержащей четырехугольный выступ и комплементарную выемку.
Ударный гайковерт 1 является одним из видов ручного ударного гайковерта, заявленным в формуле изобретения, и является инструментом, разработанным как для затягивания резьбы, так и для отвинчивания резьбы. Пневматический двигатель 2 является одним из видов средства генерации вращающего момента согласно формуле изобретения. Цилиндрический вращающийся элемент 4 является одним из видов вращающегося элемента согласно формуле изобретения.
Пневматический двигатель 2 выполнен с возможностью обеспечения вращения с высокой скоростью в направлении по часовой стрелке или в направлении против часовой стрелки сжатым воздухом, подаваемым в него снаружи через канал подачи воздуха (не показан), расположенный в зажимной части 1а, посредством операции переключения рычага 20 управления и переключающего клапана (не показан), как уже известно. Вращающий момент цилиндрического вращающегося элемента 4, который приводится во вращение вместе с ведущим валом 3 пневматического двигателя 2, обеспечивающего вращение, передается через механизм передачи 5 ударной силы, упомянутый ниже, к ведомому валу 6, называемому блоком упорного стержня, имеющего передний конец, выступающий вперед с переднего конца корпуса 1б, и, в свою очередь, в гнездо (не показано), прикрепленное к переднему концу ведомого вала 6, так, чтобы затягивать резьбовой элемент, подогнанный к гнезду известным способом.
Задняя часть ведомого вала 6 выполнена в стволе 6а корпуса, имеющего большой диаметр, и ствол 6а установлен в центре цилиндрического вращающегося элемента 4. Цилиндрический вращающийся элемент 4 вращается вокруг ствола 6а ведомого вала 6, и вращающий момент передается к ведомому валу 6 через механизм передачи 5 ударной силы, как упомянуто выше.
Механизм передачи 5 ударной силы содержит, как показано на фиг.1 и 3, ударную ступицу 5а, проходящую внутрь из надлежащего местоположения внутренней периферии цилиндрического вращающегося элемента 4, и блок 5b упорного стержня, который поддерживается в полукруглой поддерживающей выемке 6б, выполненной на стволе 6а ведомого вала 6 так, чтобы свободно качаться из стороны в сторону. Блок 5b упорного стержня установлен в состояние, в котором он находится под наклоном относительно горизонтального направления, и затем ударная ступица 5а сталкиваются с одной высокой торцевой поверхностью блока 5b упорного стержня, так, чтобы передать вращающий момент цилиндрического вращающегося элемента 4 в сторону ведомого вала 6.
Механизм передачи 5 ударной силы является одним из видов механизма передачи вращающего момента согласно формуле изобретения.
Как показано на фиг.4, когда кулачковая пластинка 5с на переднем конце блока 5b упорного стержня размещена внутри вогнутой части 5d, имеющей заданную длину окружности, сформированной по кругу во внутренней периферии цилиндрического вращающегося элемента 4 на его переднем конце, блок упорного стержня сохраняется в своем нейтральном положении, в котором он не способен соединяться с ударной ступицей 5а. Когда кулачковая пластинка выходит из вогнутой части 5d и приходит в контакт с внутренней периферией цилиндрического вращающегося элемента 4, блок упорного стержня принимает наклонное положение, чтобы столкнуться с ударной ступицей 5а. Блок 5b упорного стержня находится под давлением в таком направлении, в котором он всегда сохраняется в нейтральном положении относительно давящего элемента 5е блока упорного стержня, пружины 5f и элемента 5g приема пружины, которые размещены в стволе 6а ведомого вала 6. Элемент 5g приема пружины находится в контакте с внутренней кулачковой поверхностью 4b цилиндрического вращающегося элемента 4. Далее, вогнутая часть 5h, предназначенная для обеспечения возможности наклона блока 5b упорного стержня, формируется во внутренней периферии цилиндрического вращающегося элемента 4 с обеих сторон от ударной ступицы 5а. Поскольку эта структура ударного гайковерта уже известна, ее подробное описание опускается.
В то время как в варианте воплощения настоящего изобретения удар производится один раз на каждый оборот цилиндрического вращающегося элемента 4, само собой разумеется, что настоящее изобретение также применимо к ручному ударному гайковерту, выполненному так, чтобы производить удар два или три раза или более на каждый оборот цилиндрического вращающегося элемента.
Элемент 7 детектирования вращения, содержащий зубчатое колесо, имеющий заданное число зубов 7а вокруг его внешней периферии, жестко установлен на цилиндрический вращающийся элемент 4 на его заднем торце интегрально с ним, как показано на фиг.2. С другой стороны, пара детектирующих датчиков 8а, 8b, содержащих полупроводниковые магниторезистивные элементы, установлена вокруг внутренней периферии невращающегося корпуса 16, таким образом, чтобы они стояли напротив элемента 7 детектирования вращения, оставляя между ними заданный кольцевой зазор. Вращение элемента 7 детектирования вращения детектируется детектирующими датчиками 8а, 8b, и выходные сигналы вводятся во входную схему 10, электрически соединенную к детектирующими датчиками 8а, 8b. Входная схема 10 соединена с электроклапаном 19, установленным в шланге 18 подачи сжатого воздуха через блок 11 усиления, блок 12 формирования формы сигнала, блок 13 центрального процессора, блок 14 выведения сигнала угла вращения, блок 15 детектирования законченного затягивания резьбы, блок 16 управления электроклапаном и выходную схему 17.
Необходимо отметить, что блок 15В детектирования законченного отвинчивания резьбы, показанный на фиг.1, используется для осуществления управления отвинчиванием резьбы ударного гайковерта 1.
Элемент 7 детектирования вращения и детектирующие датчики 8а, 8b составляют один из видов средства детектирования согласно формуле изобретения.
В вышеупомянутой компоновке электрические элементы, выполненные между входной схемой 10 и выходной схемой 17, размещены в контроллере (не показан), расположенном снаружи ударного гайковерта. Контроллер и электроклапан 19 могут быть размещены в ударном гайковерте. Электроклапан 19 и блок 16 управления электроклапаном могут быть заменены устройством закрытия подачи сжатого воздуха и адекватной частью управления.
Далее будет описан способ считывания угла вращения резьбового элемента, такого как болт и гайка, в ударном гайковерте.
Сначала резьбовой элемент 9, подлежащий затягиванию, подгоняется в гнездо, выполненное передней торцевой части ведомого вала 6, и заданный угол затягивания резьбы предварительно вводится в блок 15 детектирования законченного затягивания резьбы. Затем, когда открывается электроклапан 19 и рычаг 20 управления ударного гайковерта нажимается, чтобы подать сжатый воздух в ударный гайковерт, для обеспечения вращения пневматического двигателя 2 в направлении затягивания резьбы (в направлении по часовой стрелке для правостороннего резьбового элемента), ведущий вал 3 и цилиндрический вращающийся элемент 4 вращаются вместе. Это вращение заставляет кулачковую пластинку 5с сдвигаться от вогнутого участка 5d, при контакте с внутренней периферией цилиндрического вращающегося элемента 4, так, чтобы блок 5b упорного стержня был наклонен. Сопротивление трения между элементом 5g приема пружины и внутренней кулачковой поверхностью 4b заставляет цилиндрический вращающийся элемент 4 и ведомый вал 6 вращаться вместе, так чтобы приводить во вращение резьбовой элемент 9 с высокой скоростью в направлении затягивания резьбы, пока резьбовой элемент не окажется на месте.
Пока резьбовой элемент 9 совершает вращение, другими словами, прежде, чем резьбовой элемент 9 встанет на место на несущей поверхности, к стороне ведомого вала 6 прикладывается небольшая нагрузка, так, чтобы элемент 7 детектирования вращения, содержащий зубчатое колесо, которое вращается вместе с цилиндрическим вращающимся элементом 4, вращался с высокой скоростью в направлении затягивания резьбового элемента 9, и зубья 7а непрерывно прокручивались над детектирующими датчиками 8а, 8b. Затем детектирующие датчики 8а, 8b осуществляют импульсные сигналы с несфазированной волновой формой, но импульсные сигналы не используются для арифметической операции детектирования угла вращения резьбового элемента до тех пор, пока резьбовой элемент не встанет на место.
Ведомый вал 6 приводится во вращение вместе с цилиндрическим вращающимся элементом 4 с высокой скоростью через механизм 5 передачи ударной силы, содержащий ударную ступицу 5а и блок 5b упорного стержня. Когда резьбовой элемент 9 встает на место на несущей поверхности, в ведомом вале 6 генерируется вращающий момент (нагрузка) сопротивления, и вращение ведомого вала 6 быстро замедляется почти до остановки. Затем ударная ступица 5а и блок 5b упорного стержня входят в столкновение друг с другом, чтобы обеспечить начало удара. После окончания удара, упругая сила пружины 5f, давящая на блок 5b упорного стержня, преодолевает силу, необходимую для приведения ударной ступицы 5а и блока 5b упорного стержня в сцепление, так чтобы сцепление между ними освободилось, и цилиндрический вращающийся элемент 4 получил возможность свободно крутиться вокруг ствола 6а ведомого вала 6.
Пока цилиндрический вращающийся элемент 4 свободно вращается цилиндрический вращающийся элемент 4 ускоряется вращающим моментом пневматического двигателя 2, в то время как с другой стороны, кулачковая пластинка 5с приводится в контакт с внутренней периферией цилиндрического вращающегося элемента 4 так, чтобы блок 5b упорного стержня был наклонен, как показано на фиг.5 и 6. После окончания свободного кручения цилиндрического вращающегося элемента 4 ударная ступица 5а приводится в сцепление с блоком 5b упорного стержня с помощью удара, как показано на фиг.7. Этот удар заставляет вращающий момент цилиндрического вращающегося элемента 4 передаваться к ведомому валу 6 так, чтобы повернуть ведомый вал 6 в направлении затягивания только на некоторый угол. Затем угол затягивания резьбы детектируется элементом 7 детектирования вращения и детектирующими датчиками 8а, 8b способом, упомянутым ниже.
Когда резьбовой элемент 9 затянулся, на стороне ведомого вала 6 генерируется сила сопротивления большая, чем вращающий момент пневматического двигателя 2. В момент, когда ведомый вал 6 заканчивает поворот на некоторый угол в направлении затягивания резьбы ударной силой ударной ступицы 5а, цилиндрический вращающийся элемент 4 вращается обратно в направлении, противоположном направлению затягивания резьбы, а затем вращается свободно в направлении затягивания резьбы посредством вращающего момента пневматического двигателя 2, как показано на фиг.8. Это приводит ударную ступицу 5а в сцепление с блоком 5b упорного стержня снова с помощью удара тем же самым способом, как изложено выше, так, чтобы дальше вращать ведомый вал 6 в направлении затягивания резьбы. В этот момент угол затягивания резьбы считывается элементом 7 детектирования вращения и детектирующими датчиками 8а, 8b. Впоследствии после свободного вращения цилиндрического вращающегося элемента 4 угол затягивания резьбы детектируется каждый раз, когда ударная ступица 5а входит в столкновение с блоком 5b упорного стержня. Когда совокупный суммарный угол затягивания резьбы достигает заданного угла затягивания резьбы, подача сжатого воздуха автоматически останавливается, чтобы закончить затягивание резьбового элемента 9.
Далее, со ссылкой на фиг.9-15, будет описан способ детектирования угла затягивания резьбы при помощи элемента 7 детектирования вращения и детектирующих датчиков 8а, 8b.
Детектирующие датчики 8а, 8b выполнены таким образом, что, когда зуб элемента 7 детектирования вращения, вращающегося вместе с цилиндрическим вращающимся элементом 4, проходит через детектирующие датчики, детектирующие датчики могут детектировать один импульс и измерять скорость цилиндрического вращающегося элемента 4, исходя из числа проходящих зубьев за единицу времени. В каждой из вышеупомянутых схем, (а) изображает зависимость функционирования между цилиндрическим вращающимся элементом 4 и ведомым валом 6; (б) иллюстрирует угол затягивания резьбы резьбового элемента 9; и (в) графически изображает временной сдвиг в скорости вращения цилиндрического вращающегося элемента 4 и угол затягивания резьбы резьбового элемента 9 каждый раз, когда обеспечивается удар. Следует отметить, что используемый резьбовой элемент 9 является элементом с правосторонней резьбой, которая должна затягиваться в направлении по часовой стрелке.
Фиг.9 изображает вид, иллюстрирующий состояние свободного вращения цилиндрического вращающегося элемента 4. В этом состоянии вращающий момент цилиндрического вращающегося элемента 4 не передается к ведомому валу 6 от механизма 5 передачи ударной силы, содержащего ударную ступицу 5а и блок 5b упорного стержня, так, чтобы цилиндрический вращающийся элемент 4 ускорялся постепенно, при свободном вращении  в направлении по часовой стрелке, как изображено скошенной вверх линией на фиг.9 (в) и фиг.15.
в направлении по часовой стрелке, как изображено скошенной вверх линией на фиг.9 (в) и фиг.15.
Детектирующие датчики 8а, 8b выполнены так, чтобы выводить импульсные сигналы, отличающиеся друг от друга по фазе на 90 градусов, как упомянуто выше. В то время как элемент 7 детектирования вращения вращается в направлении затягивания резьбы (в направлении по часовой стрелке), волновая форма импульсного сигнала выводится из детектирующего датчика 8а, фаза которого опережает на 90 градусов фазу другого детектирующего датчика 8b, как показано на фиг.15. С другой стороны, когда ударная ступица 5а сталкивается с блоком 5b упорного стержня, во время удара, и затем элемент 7 детектирования вращения вращается обратно в направлении против часовой стрелки вместе с цилиндрическим вращающимся элементом 4, фазы сигналов из обоих детектирующих датчиков 8а, 8b изменяются на противоположные. Другими словами, волновая форма импульсного сигнала выводится из другого детектирующего датчика 8b, фаза которого опережает на 90 градусов фазу другого детектирующего датчика 8а.
Когда элемент 7 детектирования вращения вращается в направлении затягивания резьбы (в направлении по часовой стрелке), волновая форма от детектирующего датчика 8а оказывается на высоком уровне (Н), когда волновая форма из другого детектирующего датчика 8b переворачивается (↑). Когда элемент 7 детектирования вращения вращается в направлении обратного вращения (в направлении против часовой стрелки), волновая форма сигнала из одного детектирующего датчика 8а оказывается на низком уровне (L). Qo представляет собой сигнал детектирования, указывающий направление вращения. Волновая форма (Н) или (L) сохраняется на высоком уровне или на низком уровне, пока направление вращения не изменяется. С другой стороны, сигнал Q1 поддерживается точно в противоположном состоянии к сигналу Qo. Блок 13 центрального процессора скомпонован так, чтобы распознавать разницу между направлением затягивания (направление по часовой стрелке) или направлением обратного вращения (направление против часовой стрелки) посредством сигналов Qo или Q1 и чтобы детектировать соответственно направленный импульсный сигнал. Таким образом, свободное вращение  детектируется посредством детектирования импульсного сигнала в направлении нормального вращения (импульсный сигнал по часовой стрелке).
детектируется посредством детектирования импульсного сигнала в направлении нормального вращения (импульсный сигнал по часовой стрелке).
Затем, в момент, в который ударная ступица 5а сталкивается с блоком 5b упорного стержня после свободного вращения цилиндрического вращающегося элемента 4, скорость вращения цилиндрического вращающегося элемента 4 становится максимальной  , как показано на фиг.10(с). Из этого состояния начинается затягивание резьбового элемента 9 посредством удара. В это время затягивания резьбы ведомый вал 6, вращаемый в направлении затягивания резьбы через механизм передачи 5 ударной силы, потребляет энергию для затягивания резьбового элемента 9, таким образом, что, когда обеспечивается первое затягивание резьбы, цилиндрический вращающийся элемент 4 замедляется
, как показано на фиг.10(с). Из этого состояния начинается затягивание резьбового элемента 9 посредством удара. В это время затягивания резьбы ведомый вал 6, вращаемый в направлении затягивания резьбы через механизм передачи 5 ударной силы, потребляет энергию для затягивания резьбового элемента 9, таким образом, что, когда обеспечивается первое затягивание резьбы, цилиндрический вращающийся элемент 4 замедляется  с максимальной скорости
с максимальной скорости  как изображено скошенной вниз линией, показанной на фиг.11 (в) и фиг.15. После этого цилиндрический вращающийся элемент 4 вращается обратно
как изображено скошенной вниз линией, показанной на фиг.11 (в) и фиг.15. После этого цилиндрический вращающийся элемент 4 вращается обратно  в направлении против часовой стрелки, как показано на фиг.12(с).
в направлении против часовой стрелки, как показано на фиг.12(с).
Момент времени, в который замедление  начинается с максимальной скорости
начинается с максимальной скорости  определяется детектированием состояния вращения элемента 7 детектирования вращения при помощи детектирующих датчиков 8а, 8b, как показано на фиг.15. Характерно, что когда цилиндрический вращающийся элемент 4 ускоряется в свободном вращении, ширины импульсных сигналов, детектируемых детектирующими датчиками 8а, 8b, постепенно уменьшаются, и в момент, в который ударная ступица 5а сталкивается с блоком 5b упорного стержня, ширины импульсных сигналов становятся минимальными. После этого, в течение времени с начала замедления цилиндрического вращающегося элемента 4 до конца вбивания (начало обратного вращения) ширины импульсных сигналов в направлении по часовой стрелке постепенно возрастают. Эти импульсы с постепенно уменьшающимися ширинами и импульсы с постепенно возрастающими ширинами выводятся из детектирующих датчиков 8а, 8b. Они детектируются блоком 13 центрального процессора как импульсные сигналы по часовой стрелке, чтобы оценить момент времени, в который ширины импульсов сужаются до минимума к исходной точке затягивания резьбового элемента 9 посредством удара (исходная точка замедления), как упомянуто выше.
определяется детектированием состояния вращения элемента 7 детектирования вращения при помощи детектирующих датчиков 8а, 8b, как показано на фиг.15. Характерно, что когда цилиндрический вращающийся элемент 4 ускоряется в свободном вращении, ширины импульсных сигналов, детектируемых детектирующими датчиками 8а, 8b, постепенно уменьшаются, и в момент, в который ударная ступица 5а сталкивается с блоком 5b упорного стержня, ширины импульсных сигналов становятся минимальными. После этого, в течение времени с начала замедления цилиндрического вращающегося элемента 4 до конца вбивания (начало обратного вращения) ширины импульсных сигналов в направлении по часовой стрелке постепенно возрастают. Эти импульсы с постепенно уменьшающимися ширинами и импульсы с постепенно возрастающими ширинами выводятся из детектирующих датчиков 8а, 8b. Они детектируются блоком 13 центрального процессора как импульсные сигналы по часовой стрелке, чтобы оценить момент времени, в который ширины импульсов сужаются до минимума к исходной точке затягивания резьбового элемента 9 посредством удара (исходная точка замедления), как упомянуто выше.
Таким образом, после детектирования исходной точки замедления цилиндрического вращающегося элемента 4 угол вращения элемента 7 детектирования вращения детектируется детектирующими датчиками 8а, 8b во время всего замедления ③ или в течение периода с начала замедления до конца удара. Другими словами, угол ΔH1 затягивания резьбы резьбового элемента 9 определяется исходя из числа импульсов, равного числу зубьев элемента 7 детектирования вращения, проходящих через детектирующие датчики 8а, 8b в течение замедления. Затем цилиндрический вращающийся элемент 4 вращается обратно ④ в направлении против часовой стрелки, как упомянуто выше. Импульсы, генерируемые во время обратного вращения ④, используются для определения исходной точки управления и для оценки плохого затягивания, такого как однократное вращение болта и гайки.
Как показано на фиг.12, после обратного вращения ④ цилиндрический вращающийся элемент 4 постепенно замедляется до остановки, затем цилиндрический вращающийся элемент 4 снова свободно вращается ① с ускорением в направлении по часовой стрелке посредством вращающего момента от пневматического двигателя 2, как показано на фиг.13. Затем ударная ступица 5а приводится в столкновение с блоком 5b упорного стержня с момента, в который скорость вращения цилиндрического вращающегося элемента 4 замедляется ③, как показано на фиг.14. Угол вращения элемента 7 детектирования вращения или угол ΔН2 затягивания резьбы резьбового элемента 9, образовавшийся в течение замедления с начала замедления ③ до конца удара, детектируется элементом 7 детектирования вращения и детектирующими датчиками 8а, 8b тем же способом, который упомянут выше. После этого каждый раз, когда цилиндрический вращающийся элемент 4 замедляется ③ посредством удара после свободного вращения ①, углы ΔН затягивания резьбы резьбового элемента 9, образовавшиеся в течение замедления ③ с начала замедления до конца вбивания, интегрируются последовательно блоком 13 центрального процессора тем же самым способом. Затем, когда интегрированный угол углов затягивания резьбы достигает предварительно установленного угла затягивания резьбы резьбового элемента 9, блок 14 выведения сигнала угла вращения выводит сигналы в блок 16 управления электроклапаном через блок 15 детектирования законченного затягивания резьбы, чтобы остановить электроклапан 19 через выходную схему 17. Эта операция также может быть выполнена при помощи логической схемы или программного обеспечения.
Таким образом, угол затягивания резьбы резьбового элемента 9 определяется посредством детектирования замедления цилиндрического вращающегося элемента 4 после удара и угла вращения элемента 7 детектирования вращения, образовавшегося в течение времени с начала замедления до конца удара (начало обратного вращения). Например, когда удар осуществляется 20 раз, до тех пор, пока не образуется предварительно установленный угол затягивания резьбы (например, 50°), рабочее время с начала до конца равно 1 секунде, и среднее время, необходимое для того, чтобы цилиндрический вращающийся элемент 4 замедлялся каждый раз, когда обеспечивается удар, равно 0,001 секунды; отсюда следует, что суммарное время, необходимое для того, чтобы резьбовой элемент 9 был затянут, равно 0,001×20=0,02 секунды. Это обстоятельство следует из того факта, что даже если биение, например 30°, вызвало в течение 1 секунды работы затягивания резьбы, то угловая ошибка угла затягивания резьбы равна 30°×0,02/1=0,6°, что составляет очень ограниченное значение (1,2%) по сравнению с предварительно установленным углом затягивания резьбы (50°) и можно сказать, что пропорция ошибки, вызванной биением, очень незначительная.
Угол вращения элемента 7 детектирования вращения во время замедления цилиндрического вращающегося элемента 4 может детектироваться способом, отличающимся от вышеупомянутого. Характерно, что угол вращения, образованный когда элемент 7 детектирования вращения вращается только в направлении затягивания резьбы, или угол свободного вращения, образованный каждый раз, когда цилиндрический вращающийся элемент 4 вращается в направлении затягивания резьбы, и угол вращения, образованный когда он вращается в направлении затягивания резьбы до тех пор, пока не закончится одно затягивание резьбы, включая угол свободного вращения, детектируются детектирующими датчиками.
Фиг.16 и 17 иллюстрируют альтернативный способ детектирования. После того, как цилиндрический вращающийся элемент 4 постепенно ускоряется, во время свободного вращения ① в направлении по часовой стрелке, как показано наклоненной вверх линией, ударная ступица 5а сталкивается с блоком 5b упорного стержня, и цилиндрический вращающийся элемент 4 замедляется ③, как показано наклоненной вниз линией, и вращается обратно. В этом процессе обеспечивается одно затягивание резьбы. A1 является исходной точкой свободного вращения ①; А2 является моментом времени, в который выполняется удар (максимальная скорость); А3 является моментом времени, в который заканчивается затягивание; и А4 является моментом времени, в который начинается обратное вращение, вращение цилиндрического элемента 4 представлено, как показано на фиг.17.
Угол затягивания резьбы (угол завинчивания) определяется выражением:

где F представляет собой угол вращения по часовой стрелке цилиндрического вращающегося элемента 4, приходящийся на один оборот последнего; J представляет собой угол свободного вращения по часовой стрелке цилиндрического вращающегося элемента 4, приходящийся на один оборот последнего; ΔН представляет собой угол затягивания резьбы (угол завинчивания).
Угол затягивания резьбы может быть вычислен посредством детектирования угла F вращения по часовой стрелке и угла J свободного вращения по часовой стрелке при помощи элемента 7 детектирования вращения и детектирующих датчиков 8а, 8b. Другими словами, угол затягивания резьбы вычисляется посредством детектирования числа зубьев элемента 7 детектирования вращения, проходящих через датчики 8а, 8b. В данном способе, даже, когда биение вызывается в ходе детектирования угла J свободного вращения по часовой стрелке и угла F вращения по часовой стрелке, поскольку угол биения, образующийся в момент времени в интервале свободного вращения от момента времени A1 до момента времени A2, включается в оба из этих углов, угол биения компенсируется обоими углами. Таким образом, даже когда вызывается биение, то поскольку влияние ограничено только до очень короткого промежутка времени (от момента времени А2 до момента времени А3), во время которого резьбовой элемент 9 затягивается ведомым валом 6, оно по существу является незначительным, и таким образом, можно обеспечивать работу затягивания резьбы с небольшой ошибкой.
Далее, в качестве другого примера ручного ударного гайковерта, используемого в настоящем изобретении, будет описан импульсный гайковерт, который сконструирован так, что во время удара не производится обратного вращения.
На фиг.18 и 19 изображена одна из его форм. Импульсный гайковерт снабжен пневматическим двигателем 2А, расположенным внутри корпуса 1А в его задней части, имеющей внизу интегрально-обеспеченную зажимную часть 1а. Центральная часть панели задней стенки масляного цилиндра 4А интегрально соединена с передним торцом ротационного ведущего вала 3А пневматического двигателя 2А посредством переходной конструкции, содержащей гексагональный выступ и комплементарную выемку.
Импульсный гайковерт является одним из типов ручного ударного гайковерта, согласно формуле изобретения, и является инструментом, разработанным как для затягивания резьбы, так и для отвинчивания резьбы. Пневматический двигатель 2А является одним из видов средства генерации вращающего момента согласно формуле изобретения. Цилиндр 4А является одним из видов вращающегося элемента согласно формуле изобретения.
Пневматический двигатель 2А выполнен так, чтобы обеспечивать вращение с высокой скоростью в направлении по часовой стрелке или в направлении против часовой стрелки сжатым воздухом, подаваемым в него снаружи через канал подачи воздуха (не показан), расположенный в зажимной части 1а, посредством операции переключения рычага 20 управления и переключающего клапана (не показан), таким же способом, как для ударного гайковерта.
Вращающий момент масляного цилиндра 4А, который приводится во вращение вместе с ведущим валом 3А пневматического двигателя 2, вызывающего вращение, передается к ведомому валу 6А, имеющему передний конец, выступающий вперед с переднего конца корпуса 1а, и, в свою очередь, в гнездо (не показано), выполненное в переднем торце ведомого вала 6А, через механизм 5А передачи ударной силы, расположенный в масляном цилиндре 4А так, чтобы затягивать резьбовой элемент, подогнанный к гнезду.
Механизм передачи 5А ударной силы имеет герметизирующие поверхности 51, 51, 52, 52, выполненные в множестве местоположений (на схеме - четыре местоположения) во внутренней периферии масляного цилиндра 4А, как показано на фиг.19. С другой стороны, сторона ведомого вала 6А имеет выемку 53 для вставки лопасти, в которой по меньшей мере одна лопасть 55 (на схеме показаны две лопасти) всегда приводится в контакт с внутренней периферией масляного цилиндра 4А посредством упругой силы пружины 54 и прижимается радиально выдвигающимся способом. Вращение масляного цилиндра 4А приводит лопасти 55 и выступающие части 56, 56, выступающие из ведомого вала 6А с различными фазами 180°, в тесный контакт с их соответствующими герметизирующими поверхностями 51, 52 маслонепроницаемым способом. Когда масляный цилиндр 4А незначительно поворачивается из этого состояния, в масляном цилиндре 4А между соседними герметизирующими поверхностями 51 и 52 посредством масла создаются камера L низкого давления и камера Н высокого давления. Дифференциальное давление между ними позволяет передавать вращающий момент удара к стороне ведомого вала 6А через обе лопасти 55, 55, так чтобы генерировать силу затягивания в том же направлении вращения, как у масляного цилиндра 4А.
Механизм передачи 5А ударной силы является одним из видов механизма передачи вращающего момента согласно формуле изобретения. Хотя в этом примере, камера Н высокого давления образуется один раз в течение каждого оборота масляного цилиндра 4А, она конечно может образовываться дважды в течение каждого оборота.
В импульсном гайковерте, выполненном таким образом, элемент 7 детектирования вращения, содержащий редуктор, имеющий заданное число зубьев 7а, жестко установлен на внешней периферии масляного цилиндра 4А интегрально с ним.
С другой стороны, пара детектирующих датчиков 8а, 8b, содержащих полупроводниковые магниторезистивные элементы, установлена вокруг внутренней периферии не вращающегося корпуса 1А так, чтобы они стояли напротив элемента 7 детектирования вращения, оставляя между ними заданный кольцевой зазор. Поскольку схема управления для сигналов, генерируемых вращением элемента 7 детектирования вращения, которые должны передаваться из входной схемы в электроклапан, идентична таковой вышеупомянутого ударного гайковерта, ее описание опускается.
Далее будет приведено описание способа считывания угла вращения резьбового элемента, типа болта и гайки, посредством импульсного гайковерта, выполненного таким образом. Резьбовой элемент 9, подлежащий затягиванию, подгоняется в гнездо, выполненное на передней торцевой части ведомого вала 6А, и заданный угол затягивания резьбы предварительно вводится в блок 15 детектирования законченного затягивания резьбы. Затем, когда нажимается электроклапан 20, чтобы подать сжатый воздух в импульсный гайковерт так, чтобы вращать пневматический двигатель 2 в направлении затягивания резьбы (в направлении по часовой стрелке для правостороннего резьбового элемента), ведущий вал 3А и масляный цилиндр 4А вращаются вместе. Это вращение передается к ведомому валу 6А через механизм 5А передачи ударной силы, чтобы заставить масляный цилиндр 4А и ведомый вал 6 вращаться вместе так, чтобы приводить во вращение резьбовой элемент 9 с высокой скоростью в направлении затягивания резьбы.
Когда резьбовой элемент 9 встает на место на несущей поверхности, в ведомом валу 6А генерируется вращающий момент (нагрузка) сопротивления, чтобы вызвать вращение ведомого вала 6А для быстрого замедления почти до остановки, в то время как с другой стороны, масляный цилиндр 4А вращается в направлении затягивания резьбы с ускорением под действием вращающего момента со стороны пневматического двигателя 2А. После того как лопасти 55 и выступающие части 56 снова приведены в тесный контакт с герметизирующими поверхностями 51, 52 маслонепроницаемым способом, соответственно, создается камера Н высокого давления, чтобы передать вращательную силу затягивания к стороне ведомого вала 6А с помощью удара, так, чтобы повернуть ведомый вал 6А в направлении затягивания резьбы на некоторый угол.
В это время масляный цилиндр 4А начинает замедляться через маслонепроницаемый контакт со стороной ведомого вала и в середине замедления угол вращения масляного цилиндра 4А или угол затягивания резьбы резьбового элемента 9 через ведомый вал 6А детектируются элементом 7 детектирования вращения и детектирующими датчиками 8а, 8b, как упомянуто ниже.
Угол затягивания резьбы резьбового элемента 9 измеряется в середине замедления масляного цилиндра 4А. Хотя замедление также вызывается прежде, чем резьбовой элемент 9 встает на место на несущей поверхности, замедление масляного цилиндра 4А прежде, чем резьбовой элемент 9 встает на место, не включается в угол затягивания резьбы резьбового элемента 9. Суждение о том, встал резьбовой элемент 9 на место или нет, выполняется способом, показанным на фиг.20(а), (б). Характерно, что, прежде чем резьбовой элемент 9 встанет на место, некоторое ускорение и замедление генерируются со скоростью вращения масляного цилиндра 4А, как показано на фиг.20(а). При вращении масляного цилиндра 4А детектируются значение Tk, полученное, когда скорость вращения становится максимальной, и значение Vk, полученное, когда скорость вращения в результате становится минимальной.
Когда минимальное значение Vk скорости вращения превосходит предварительно установленный нижний предел (например, 1/3 от максимального значения Tk скорости вращения), другими словами, когда генерируется только незначительное замедление, можно сделать вывод, что резьбовой элемент 9 еще не встал на место, так что это незначительно замедленное вращение масляного цилиндра 4А не используется для вычисления угла затягивания резьбы резьбового элемента 9.
Когда резьбовой элемент 9 встает на место, разность между максимальным значением Tk+1 и результирующим минимальным значением Vk+1 скорости вращения масляного цилиндра 4А становится значительной, как показано на фиг.20(б). Когда минимальное значение Vk+1 ниже предварительно установленного нижнего предела (например, 1/3 максимального значения Tk+1 скорости вращения), другими словами, когда генерируется значительное замедление, делают вывод, что резьбовой элемент 9 уже встал на место, так что это значительно замедленное вращение масляного цилиндра 4А используется для вычисления угла затягивания резьбы резьбового элемента 9.
Момент времени, когда скорость вращения становится максимальной, детектируется тем же способом, который был описан на фиг.15. Также, момент времени, когда скорость вращения становится минимальной, детектируется тем же способом, как показано на фиг. 15. Характерно, что в этом варианте воплощения, ширина импульсных сигналов, детектируемых детектирующими датчиками 8а, 8b, постепенно расширяется до максимума, и после этого постепенно сужается. Момент времени, в который ширина импульсного сигнала становится максимальной прежде, чем она начинает постепенно сужаться, оценивается как момент времени, когда скорость вращения масляного цилиндра 4А стала минимальной.
Резьбовой элемент затягивается, когда масляный цилиндр 4А находится в середине значительного замедления, как упомянуто выше. Детектирование и вычисление угла затягивания резьбы в середине этого замедления будет описано ниже.
Маслонепроницаемое состояние создается, когда масляный цилиндр 4А наклоняется назад под некоторым углом М относительно ведомого вала 6А, и маслонепроницаемое состояние исчезает, когда масляный цилиндр 4А наклоняется вперед под некоторым углом N относительно ведомого валу 6А, как показано на фиг.21(а), (б). Эти углы М, N являются углами, задаваемыми в конструкции импульсного гайковерта, и взаимосвязь между этими углами образуется даже тогда, когда масляный цилиндр 4А и ведомый вал 6А вращаются вместе в середине маслоне проницаемого состояния, для того, чтобы затягивать резьбовой элемент 9.
Далее, со ссылкой на фиг.22 и 23, будет описано вращение ведомого вала 6А в середине замедления масляного цилиндра 4А.
В момент a2, маслонепроницаемое состояние обеспечивается масляным цилиндром 4А и ведомым валом 6А, и масляный цилиндр 4А начинает замедление. В это время ведомый вал 6А сохраняется в состоянии приостановки. С этого момента времени масляный цилиндр 4А начинает сжимать масло. Когда масляный цилиндр сначала вращается под углом М, чтобы соответствовать по фазе ведомому валу 6А, и затем вращается далее под углом g1, чтобы сжимать масло, генерируется ударный вращающий момент, превышающий нагрузку вращающего момента ведомого вала 6А. С этого момента времени А3, масляный цилиндр 4А и ведомый вал 6А вращаются вместе под одинаковым углом ΔG1, соответственно, при сохранении разности угловой фазы g1. Величина разности угловой фазы g1 изменяется в соответствии с вращающим моментом нагрузки стороны ведомого вала 6А. На ранней стадии посадки резьбового элемента 9 угол мал, и он возрастает по ходу процесса затягивания резьбового элемента 9.
В то время как разность угловой фазы g1 представлена углом, сформированным относительно направления затягивания резьбы (угол вращения по часовой стрелке) на фиг.23, могут иметься случаи, в которых угол g1 является нулевым или его абсолютное значение является отрицательным значением, меньшим, чем М.
Другими словами, могут иметься случаи, когда в тот же момент времени или до него, масляный цилиндр 4А и ведомый вал 6А будут соответствовать по фазе друг другу после того, как обеспечивается маслонепроницаемое состояние, масляный цилиндр 4А и ведомый вал 6А вращаются вместе.
В момент времени А4, когда ударный вращающий момент на стороне ведомого вала 6А возрастает настолько, чтобы превысить ударный вращающий момент, генерируемый дифференциальным давлением между камерой Н высокого давления и камерой L низкого давления, производимым внутри масляной камеры 4А, ведомый вал 6А прекращает вращаться, а масляный цилиндр 4А продолжает вращаться с замедлением до момента времени A5, в который исчезает маслонепроницаемое состояние.
В момент времени А4 масляный цилиндр 4А опережает по фазе ведомый вал 6А на угол g1. Соответственно, требуется чтобы масляный цилиндр 4А вращался под углом (N-g1) до момента времени A5, в который исчезает маслонепроницаемое состояние.
Таким образом, после вращения под углом (М+g1) в пределах угла Z1 в диапазоне от момента времени А2 до момента времени A5, которые можно детектировать вышеупомянутым способом, масляный цилиндр 4А вращается вместе с ведомым валом 6А под углом ΔG1. После этого, только масляный цилиндр 4А вращается далее под углом (N-g1).
Общая сумма этих углов представляет собой угол вращения Z1 масляного цилиндра 4А в диапазоне от момента времени А2 до момента времени A5, который определяется уравнением:

Как упоминалось выше, углы М и N представляют собой значения, которые могут быть заданы в конструкции. Там, где δ представляет собой сумму этих углов, угол вращения ведомого вала 6А от момента времени A2 до момента времени A5, другими словами, угол затягивания резьбы ΔG1 резьбового элемента 9, может быть определен путем вычитания суммы 8 углов из угла Z1 вращения масляного цилиндра 4А в диапазоне от момента времени A2 до момента времени A5.
Теперь, со ссылкой на фиг.24-30 будет описан конкретный способ детектирования угла затягивания резьбы резьбового элемента 9, определяемого ведомым валом 6А, при помощи элемента 7 детектирования вращения и детектирующих датчиков 8а, 8b.
В каждой из диаграмм, (а) представляет собой иллюстрацию угла затягивания резьбы резьбового элемента 9, а (b) представляет собой графическую зависимость временного сдвига при детектировании скорости вращения масляного цилиндра 4А и угла затягивания резьбы резьбового элемента 9, каждый раз, когда обеспечивается удар. Направление, в котором должен затягиваться резьбовой элемент 9, иллюстрируемое в диаграммах, является направлением по часовой стрелке.
Фиг.24 изображает диаграмму, показывающую состояние, в котором масляный цилиндр 4А вращается свободно с ускорением. В этом состоянии масляный цилиндр 4А вращается в направлении по часовой стрелке с ускорением, как изображено наклоненной вверх линией ① в диаграмме. После того, как масляный цилиндр 4А вращается свободно, лопасти 55 и выступающие части 56 входят в тесный контакт с герметизирующими поверхностями 51, 52 маслонепроницаемым способом, соответственно, в момент чего скорость свободного вращения становится максимальной, как показано на фиг.25. С этого момента времени А2 начинается сжатие масла.
Когда масло сжимается, масляный цилиндр 4А замедляется, как изображено наклоненной вниз линией ② на фиг.26. На ранней стадии замедления вращающий момент, необходимый для того, чтобы принудить ведомый вал 6А вращаться через обе лопасти 55, 55 посредством дифференциального давления между камерой Н высокого давления и камерой L низкого давления меньше, чем вращающий момент на стороне нагрузки, так что ведомый вал 6А и резьбовой элемент 9 остаются в их стационарном состоянии.
Как показано на фиг.27, масляный цилиндр 4А вращается затем с замедлением, чтобы сжимать масло, в момент времени А3, в который ударный вращающий момент, приложенный к ведомому валу 6А через дифференциальное давление между камерой Н высокого давления и камерой L низкого давления, превышает вращающий момент на стороне нагрузки. С этого момента времени, масляный цилиндр 4А и ведомый вал 6А взаимодействуют, чтобы затягивать резьбовой элемент 9 под некоторым углом, при поддержании разности фаз в угле между ними. После того, как резьбовой элемент 9 затягивается, вращающий момент на стороне нагрузки выше, чем ударный вращающий момент, приложенный к ведомому валу 6А через дифференциальное давление между камерой Н высокого давления и камерой L низкого давления, так, чтобы ведомый вал 6А остановился в момент времени А4, в то время как масляный цилиндр 4А вращается с замедлением до момента времени A5, в который исчезает маслонепроницаемое состояние, как показано на фиг.28.
После момента времени A5 маслонепроницаемое сопротивление устраняется из масляного цилиндра 4А, таким образом, чтобы масляный цилиндр снова начал свободное вращение ① с ускорением, как показано на фиг.29. Затем масляный цилиндр 4А снова приводится в маслонепроницаемый контакт с ведомым валом 6А и замедляется ①, как показано на фиг.30. В середине замедления масляный цилиндр 4А и ведомый вал 6А снова взаимодействуют, чтобы затянуть резьбовой элемент 9 под некоторым углом, при поддержании разности фаз в угле между ними. После этого масляный цилиндр 4А замедляется до тех пор, пока не исчезает маслонепроницаемое состояние.
Угол вращения ведомого вала 6А в середине замедления масляного цилиндра 4А, то есть угол вращения резьбового элемента 9, является углом, образованным в период от момента времени А3 до момента времени А4. Угол ΔG1 завинчивания резьбового элемента 9 в этом периоде рассчитывается как угол (Z1-8) после того, как угол Z1 детектируется вышеупомянутым способом.
В последующем выполняется такой же процесс, то есть масляный цилиндр 4А свободно вращается и замедляется, и резьбовой элемент 9 затягивается в середине замедления. Угол затягивания резьбы ΔG1, образованный в середине замедления, интегрируется блоком 13 центрального процессора. Когда интегрированное значение угла затягивания резьбы достигает предварительно установленного угла затягивания резьбы резьбового элемента 9, блок 14 выведения сигнала угла вращения выводит сигналы в блок 16 управления электроклапаном через блок 15 детектирования законченного затягивания резьбы, чтобы остановить электроклапан 19 через выходную схему 17.
В дополнение к вышеупомянутому способу детектирование угла вращения ведомого вала 6А, образованного в середине замедления масляного цилиндра 4А, с использованием элемента 7 детектирования вращения, может быть выполнено способом, отличающимся от способа, в котором угол свободного вращения, образующийся каждый раз, когда масляный цилиндр 4А вращается в направлении затягивания резьбы, и угол вращения, образующийся до завершения каждого замедления, включая угол свободного вращения, детектируются детектирующими датчиками.
Фиг.31, 32 изображают иллюстрацию способа детектирования. После свободного вращения ① с ускорением, как показано наклоненной вверх линией, масляный цилиндр 4А входит в маслонепроницаемый контакт с ведомым валом 6А и замедляется ②, чтобы выполнить одно затягивание резьбы в середине замедления, как показано наклоненной вниз линией. Состояние вращения масляного цилиндра 4А представлено таким, как показано на фиг.32, где A1 представляет исходный момент свободного вращения ①, A2 является моментом времени, в который производится маслонепроницаемый контакт (максимальная скорость), А3 является моментом времени, в который начинается завинчивание, А4 является моментом времени, в который завинчивание останавливается, и A5 является моментом времени, в который заканчивается замедление масляного цилиндра 4А и начинается следующее ускорение.
Из фиг.32, угол затягивания резьбы (угол завинчивания) определяется выражением:

где F' является, углом вращения по часовой стрелке за цикл масляного цилиндра 4А; J' представляет собой угол свободного вращения по часовой стрелке за цикл масляного цилиндра 4А; Z - угол замедления масляного цилиндра 4А; ΔG1 представляет собой угол затягивания резьбы (угол завинчивания).
Угол затягивания резьбы вычисляется, детектируя угол F' вращения по часовой стрелке и угол J' свободного вращения по часовой стрелке при помощи элемента 7 детектирования вращения и детектирующих датчиков 8а, 8b. В данном способе даже когда биение вызывается в ходе детектирования угла J' свободного вращения по часовой стрелке и угла F' вращения по часовой стрелке, поскольку угол биения, образующийся в момент времени в интервале свободного вращения от момента времени A1 до момента времени А2, включается в оба из этих углов, угол биения компенсируется обоими углами. Таким образом, даже, когда вызывается биение, то, поскольку влияние его ограничено только до очень короткого промежутка времени (от момента времени A2 до момента времени A5), во время которого масляный цилиндр 4А замедляется, оно по существу является незначительным и также может обеспечивать работу затягивания резьбы с небольшой ошибкой.
Далее будет описан способ детектирования степени генерации биения для определения надежности затягивания.
Для изучения действительного качества практической работы необходимо подтвердить надежность затягивания резьбы и, соответственно, необходимо узнать степень биения при затягивании резьбы.
Сначала речь будет идти об управляемом вручную гайковерте, разработанном для генерации обратного вращения.
В этом типе управляемого вручную гайковерте, как показано на фиг.33, когда цилиндрический вращающийся элемент 4 обеспечивает один удар на один его оборот, число импульсов, детектируемых в соответствии с и выведенных из угла вращения в одном цикле от одного удара до следующего удара, другими словами, число импульсов, полученных путем вычитания числа импульсов (Rp), соответствующих углу обратного вращения, из числа импульсов (Fp), соответствующих углу вращения в направлении затягивания резьбы, является суммой числа импульсов на оборот без биения (что выражается Pdp, в данном случае, число импульсов, соответствующее 360 градусам), числа импульсов (ΔНр), соответствующего углу затягивания и числа импульсов (hp), генерируемых биением. Число импульсов (hp), генерируемых биением, может принимать любое положительное значение, отрицательное значение и ноль в зависимости от направления биения, что поясняется ниже.
Число импульсов, детектируемых и полученных из вращения цилиндрического вращающегося элемента от начала до конца работы затягивания резьбы (которое называется суммарным числом импульсов, которое представлено как значение, полученное путем вычитания совокупного суммарного числа импульсов (Rp) в направлении, противоположном к направлению затягивания резьбы, из совокупного суммарного числа импульсов (Rp) в направлении затягивания резьбы), может быть выражено как сумма совокупного суммарного числа импульсов, соответствующих фактическому углу затягивания резьбы (который представлен как ΔНр, который называется числом импульсов угла опережения), совокупного суммарного запроектированного числа импульсов (Pdp), предварительно установленного согласно конструкции, соответствующего числу вбивании до конца работы (=запроектированное число импульсов х число биений n), и совокупного суммарного числа импульсов биения (hp), соответствующего углу биения до конца работы. Число запроектированных импульсов представляет собой типичное значение, предписанное для соответствующего ударного гайковерта.
В случае управляемого вручную гайковерта, в котором цилиндрический вращающийся элемент обеспечивает m ударов за один его оборот, число запроектированных импульсов является числом импульсов, соответствующих углу 360°/m. В случае управляемого вручную гайковерта, в котором цилиндрический вращающийся элемент 4 обеспечивает один удар за один свой оборот, число запроектированных импульсов равно числу импульсов, соответствующих углу 360°. В случае управляемого вручную гайковерта, в котором цилиндрический вращающийся элемент 4 обеспечивает два удара за один свой оборот, число запроектированных импульсов равно числу импульсов, соответствующих углу 180°.
 .
.
Во-вторых, со ссылкой на фиг.34, будет описан ударный гайковерт, разработанный, чтобы не генерировать обратного вращения.
В случае управляемого вручную гайковерта, в котором масляный цилиндр 4А обеспечивает один удар за один его оборот, число импульсов, детектируемое в соответствии с и выведенное из угла вращения в одном цикле от исходного момента ускорения масляного цилиндра 4А вращающегося элемента до конца замедления, выражается как сумма числа импульсов, полученного путем вычитания числа импульсов, соответствующего углу δ (сумма углов М и N, показанных на фиг.23) из числа импульсов за оборот без биения (что выражено Pdp, числом импульсов, соответствующих 360° в данном случае ударного гайковерта), числа импульсов, генерируемых биением, и числа импульсов детектируемых при замедлении масляного цилиндра 4А. Число импульсов, детектируемое при замедлении масляного цилиндра 4А, равно сумме числа импульсов, соответствующего углу затягивания резьбы (которое называется числом опережающих импульсов). и числа импульсов, соответствующих углу δ. Короче говоря, число импульсов, соответствующее углу вращения в одном цикле масляного цилиндра 4А, может быть представлено как:
Таким образом, как показано в следующем уравнении 7, число импульсов, детектируемое и полученное из вращения масляного цилиндра 4А во время периода от начала до конца работы затягивания резьбы (которое называется суммарным числом импульсов), может быть выражено как полная сумма совокупного суммарного числа импульсов, соответствующего фактическому углу затягивания резьбы, или опережающих импульсов (которое представлено как ΔGр), совокупного суммарного числа запроектированных импульсов (Pdp), предварительно установленного согласно конструкции, соответствующего числу ударов до конца работы (=число запроектированных импульсов х число ударов n), и совокупного суммарного числа импульсов биения (hp), соответствующего углу биения до конца работы.
Число запроектированных импульсов показывает такое же содержание, как в случае ударного гайковерта, разработанного, чтобы генерировать обратное вращение. В случае управляемого вручную гайковерта, в котором масляный цилиндр 4А обеспечивает m ударов за каждый его оборот, число запроектированных импульсов равно числу импульсов, соответствующих углу 360°/m.
Суммарное число импульсов, определенное уравнением 5, в ударном гайковерте, обеспечивающем обратное вращение, представляет собой значение, полученное, когда совокупное суммарное число импульсов в направлении, противоположном направлению затягивания резьбы, высчитывается из совокупного суммарного числа импульсов в направлении затягивания резьбы, как упомянуто выше. В ударном гайковерте, не обеспечивающем обратное вращение, полное число импульсов может быть равно суммарному числу импульсов посредством приравнивания нулю суммарного числа импульсов в направлении, противоположном направлению затягивания резьбы. Таким образом, уравнение 7 является синонимом уравнению 5, так, что ударный гайковерт с обратным вращением и ударный гайковерт без обратного вращения должны трактоваться одинаково относительно совокупного суммарного числа импульсов биения и частоты биения, как упоминается ниже.
Так как совокупные суммарные числа опережающих импульсов и суммарное число импульсов определяются из уравнения 5 посредством элемента 7 детектирования вращения и детектирующих датчиков 8а, 8b, как упомянуто выше, а число запроектированных импульсов предварительно устанавливается, то совокупное суммарное число импульсов биения может быть вычислено из уравнения (8).
Совокупное суммарное число импульсов биения принимает любое из положительных значений, отрицательных значений и ноль. Когда совокупное суммарное число импульсов биения имеет отрицательное значение, это показывает, что генерируется любой из следующих трех различных случаев биения.
① 
② 
③ 
Когда совокупное суммарное число импульсов биения является положительным значением, это показывает, что генерируется любой из следующих трех различных случаев биения.
④ 
⑤ 
⑥ 
Здесь, βw(положительное): угол, под которым ударный гайковерт, включающий подобный ударный гайковерт, вращается в том же направлении, что направление затягивания резьбы относительно центра резьбы. Это значение включает нулевой угол.
βw(отрицательное): угол, под которым ударный гайковерт, включающий подобный ударный гайковерт, вращается в направлении, противоположном направлению затягивания резьбы относительно центра резьбы. Это значение включает нулевой угол.
βc(положительное): угол, под которым центр резьбы вращается вокруг точки, отличной от центра, в том же направлении, что направление затягивания резьбы. Это значение включает нулевой угол.
βc(отрицательное): угол, под которым центр резьбы вращается вокруг точки, отличной от центра в направлении, противоположном направлению затягивания резьбы. Это значение включает нулевой угол.
Процент биения в периоде от начала до конца работы затягивания резьбы (который называется частотой биения) может быть вычислен из следующего уравнения 9:
Частота биения может использоваться как показатель, показывающий качество работы затягивания резьбы. Если частота биения велика, то может быть послано предупреждение, чтобы побудить рабочего повторить шаг затягивания резьбы. Также, частота биения, может применяться к обучению работе затягивания резьбы.
Сравнивая совокупное суммарное число импульсов биения, вычисленное из уравнения (8), с предварительно установленным допустимым числом импульсов, можно оценить надежность затягивания резьбы. Если совокупное суммарное число импульсов биения слишком велико, то можно сделать вывод, что угол биения является большим, и следовательно надежность затягивания резьбы низкая. С другой стороны, если совокупное суммарное число импульсов биения мало, то можно сделать вывод, что угол биения является малым и, следовательно надежность затягивания резьбы высока.
Далее, частота биения, вычисленная из уравнения (9), также может использоваться для оценки надежности затягивания резьбы. Сравнивая частоту биения, вычисленную из уравнения (9), с предварительно установленной допустимой частотой, можно оценить надежность затягивания резьбы. Если частота биения слишком велика, то можно сделать вывод, что надежность затягивания резьбы низкая. С другой стороны, если частота биения мала, то можно сделать вывод, что угол биения является малым, и следовательно надежность затягивания резьбы высока.
Далее будет дано описание способа управления ручным отвинчивающим инструментом с помощью ударного гайковерта в качестве примера ударного гайковерта, имеющего вышеупомянутую конструкцию, в котором обеспечивается обратное вращение.
Следует отметить, что описанный здесь ударный гайковерт является типом инструментов затягивания резьбы с ручным приводом, которые применимы как для затягивания резьбы, так и для отвинчивания резьбы. Когда ударный гайковерт используется для отвинчивания резьбы, он представлен в виде одного варианта воплощения отвинчивающего инструмента с ручным приводом согласно формуле изобретения.
Сначала, гнездо, подогнанное к переднему торцу ведомого вала 6, подгоняется к резьбовому элементу 9 для отвинчивания, и предварительно вводится в блок 15В детектирования законченного отвинчивания резьбы заданный угол отвинчивания резьбы. После этого открывается электроклапан 19 и клапан переключения ударного гайковерта переключается на сторону отвинчивания резьбы. Затем, когда рычаг управления 20 действует для подачи сжатого воздуха в ударный гайковерт, так, чтобы вращать пневматический двигатель 2 в направлении отвинчивания резьбы (в направлении против часовой стрелки для правостороннего резьбового элемента), цилиндрический вращающийся элемент 4 вращается свободно вокруг ствола 6а ведомого вала 6. В ходе свободного вращения цилиндрический вращающийся элемент 4 ускоряется вращательной приводной мощностью пневматического двигателя 2 и кулачковая пластинка 5с приводится в контакт с внутренней периферией цилиндрического вращающегося элемента 4 так, чтобы наклонить блок 5b упорного стержня, как показано на фиг.35 и 36. Цилиндрический вращающийся элемент 4 приводит ударную ступицу 5а в сцепление с блоком 5b упорного стержня с помощью удара, как показано на фиг.37, так чтобы вращающий момент цилиндрического вращающегося элемента 4 был передан к ведомому валу 6 посредством ударной силы, так чтобы вращать ведомый вал 6 в направлении отвинчивания резьбы только под некоторым углом. Угол отвинчивания в это время детектируется элементом 7 детектирования вращения и детектирующими датчиками 8а, 8b, как упоминается ниже.
Когда резьбовой элемент 9 отвинчивается, на стороне ведомого вала 6 генерируется сила сопротивления, большая, чем вращающий момент пневматического двигателя 2. В момент времени, когда ведомый вал 6 заканчивает вращение под некоторым углом в направлении отвинчивания резьбы под действием ударной силы ударной ступицы 5а, цилиндрический вращающийся элемент 4 вращается обратно в направлении, противоположном направлению отвинчивания резьбы, и затем вращается свободно в направлении отвинчивания резьбы под действием вращающего момента пневматического двигателя 2, как показано на фиг.38. Это снова приводит ударную ступицу 5а в сцепление с блоком 5b упорного стержня с помощью удара тем же способом, так чтобы далее вращать ведомый вал 6 в направлении отвинчивания резьбы. В этот момент времени угол отвинчивания резьбы считывается элементом 7 детектирования вращения и детектирующими датчиками 8а, 8b. Впоследствии, после свободного вращения цилиндрического вращающегося элемента 4 угол отвинчивания резьбы детектируется каждый раз, когда ударная ступица 5а входит в столкновение с блоком 5b упорного стержня. Когда совокупный суммарный угол отвинчивания резьбы достигает заданного предварительно установленного угла отвинчивания резьбы, подача сжатого воздуха автоматически останавливается, чтобы закончить отвинчивание резьбового элемента 9.
Таким образом, ударный гайковерт останавливается под управлением предварительно установленного угла отвинчивания резьбы, и таким образом можно устранить проблему выпадения болта или гайки.
Этот способ детектирования угла отвинчивания резьбы посредством элемента 7 детектирования вращения и детектирующих датчиков 8а, 8b использует основной метод такого же содержания, который был описан со ссылкой на фиг.9-15. Для подтверждения этого, со ссылкой на фиг.39-45, будет конкретно описан способ детектирования угла отвинчивания резьбы настоящего изобретения.
Датчики 8а, 8b выполнены так, что, когда зуб элемента 7 детектирования вращения, вращающегося вместе с цилиндрическим вращающимся элементом 4, проходит через детектирующие датчики, детектирующие датчики могут детектировать один импульс и измерять скорость цилиндрического вращающегося элемента 4, исходя из числа проходящих зубьев за единицу времени. В каждой из вышеупомянутых диаграмм, (а) изображает зависимость функционирования между цилиндрическим вращающимся элементом 4 и ведомым валом 6; (б) иллюстрирует угол отвинчивания резьбы резьбового элемента 9; (в) графически изображает временной сдвиг в скорости вращения цилиндрического вращающегося элемента 4 и угла отвинчивания резьбы резьбового элемента 9, каждый раз, когда выполняется удар. Следует отметить, что направление резьбового элемента 9, подлежащего отвинчиванию, является направлением против часовой стрелки.
Фиг.39 изображает вид, показывающий состояние свободного вращения цилиндрического вращающегося элемента 4. В этом состоянии, вращающий момент цилиндрического вращающегося элемента 4 не передается к ведомому валу 6 через механизм 5 передачи ударной силы, содержащий ступицу 5а удара и блок 5b упорного стержня, так чтобы цилиндрический вращающийся элемент 4 постепенно ускорялся, при свободном вращении  в направлении против часовой стрелки, как изображено наклоненной вниз линией на фиг.39(в) и фиг.45.
в направлении против часовой стрелки, как изображено наклоненной вниз линией на фиг.39(в) и фиг.45.
Детектирующие датчики 8а, 8b выполнены так, чтобы выводить импульсные сигналы, отличающиеся друг от друга по фазе на 90 градусов, как упомянуто выше. В то время как элемент 7 детектирования вращения вращается в направлении отвинчивания резьбы (в направлении против часовой стрелки), волновая форма импульсного сигнала выводится из одного детектирующего датчика 8а, фаза которого отстает на 90 градусов от фазы другого детектирующего датчика 8b, как показано на фиг.45. С другой стороны, когда ударная ступица 5а сталкивается с блоком 5b упорного стержня, во время удара, и затем элемент 7 детектирования вращения вращается обратно в направлении против часовой стрелки вместе с цилиндрическим вращающимся элементом 4, фазы сигналов из обоих детектирующих датчиков 8а, 8b меняются на противоположные. Другими словами, волновая форма импульсного сигнала выводится из другого детектирующего датчика 8b, фаза которого отстает на 90 градусов от фазы другого детектирующего датчика 8а.
Когда элемент 7 детектирования вращения вращается в направлении отвинчивания резьбы (в направлении против часовой стрелки), волновая форма, выводимая из одного детектирующего датчика 8а, оказывается на низком уровне (L), когда волновая форма из другого детектирующего датчика 8b переворачивается (↑). Когда элемент 7 детектирования вращения вращается в направлении обратного вращения (направление по часовой стрелке), волновая форма из одного детектирующего датчика 8а оказывается на высоком уровне (Н). Qo представляет собой сигнал детектирования, указывающий направление вращения. Волновая форма (L) или (Н) сохраняется на низком уровне или на высоком уровне, пока направление вращения не изменится. С другой стороны, сигнал Q1 поддерживается точно в противоположном состоянии к сигналу Qo. Блок 13 центрального процессора скомпонован так, чтобы обеспечить отличие между направлением отвинчивания (направление против часовой стрелки) или направлением обратного вращения (направление по часовой стрелке) посредством сигналов Qo или Q1, и чтобы детектировать соответственно направленный импульсный сигнал.
Затем в момент, в который ударная ступица 5а сталкивается с блоком 5b упорного стержня после свободного вращения цилиндрического вращающегося элемента 4, скорость вращения цилиндрического вращающегося элемента 4 становится максимальной как показано на фиг.40(с). Из этого состояния начинается отвинчивание резьбового элемента 9 посредством удара. В это время отвинчивания резьбы ведомый вал 6, вращаемый в направлении отвинчивания резьбы через механизм передачи 5 ударной силы, потребляет энергию для отвинчивания резьбового элемента 9, так что когда обеспечивается первое отвинчивание резьбы, цилиндрический вращающийся элемент 4 замедляется  с максимальной скорости направления против часовой стрелки
с максимальной скорости направления против часовой стрелки  как показано наклоненной вверх линией, изображенной на фиг.41(с) и фиг.45. После этого, цилиндрический вращающийся элемент 4 вращается обратно
как показано наклоненной вверх линией, изображенной на фиг.41(с) и фиг.45. После этого, цилиндрический вращающийся элемент 4 вращается обратно  в направлении по часовой стрелке, как показано на фиг.42(с).
в направлении по часовой стрелке, как показано на фиг.42(с).
Момент времени, в который замедление ③ начинается с максимальной скорости ②, определяется детектированием состояния вращения элемента 7 детектирования вращения при помощи детектирующих датчиков 8а, 8b, как показано на фиг.45. Характерно, что когда цилиндрический вращающийся элемент 4 ускоряется в свободном вращении, ширины импульсных сигналов, детектируемых детектирующими датчиками 8а, 8b, постепенно уменьшаются, и в момент, при котором ударная ступица 5а сталкивается с блоком 5b упорного стержня, ширины импульсных сигналов становятся минимальными. После этого, в течение времени с начала замедления цилиндрического вращающегося элемента 4 до конца удара (начало обратного вращения) ширины импульсных сигналов в направлении против часовой стрелки постепенно возрастают. Эти импульсы с постепенно уменьшающимися ширинами и импульсы с постепенно возрастающими ширинами выводятся из детектирующих датчиков 8а, 8b. Они детектируются блоком 13 центрального процессора как импульсные сигналы против часовой стрелки, чтобы оценить момент времени, в который ширины импульсов сужаются до минимума к исходной точке отвинчивания резьбового элемента 9 посредством удара(исходная точка замедления), как упомянуто выше.
Путем детектирования этого момента времени детектируется генерация удара для отвинчивания резьбы.
Таким образом, детектируется генерация удара для отвинчивания резьбы и еще детектируется угол отвинчивания. В этом случае после того, как детектируется исходная точка замедления цилиндрического вращающегося элемента 4, угол вращения элемента 7 детектирования вращения детектируется детектирующими датчиками 8а, 8b во время всего замедления ③ или в течение периода с начала замедления до конца удара. Другими словами, угол ΔK1 отвинчивания резьбы резьбового элемента 9 определяется исходя из числа импульсов, равного числу зубьев элемента 7 детектирования вращения, проходящих через детектирующие датчики 8а, 8b в течение замедления. Затем цилиндрический вращающийся элемент 4 вращается обратно ④ в направлении против часовой стрелки, как упомянуто выше.
Как показано на фиг.42, после обратного вращения ④ цилиндрический вращающийся элемент 4 постепенно замедляется до остановки, цилиндрический вращающийся элемент 4 снова свободно вращается ① с ускорением в направлении против часовой стрелки посредством вращающего момента от пневматического двигателя 2, как показано на фиг.43. Затем ударная ступица 5а приводится в столкновение с блоком 5b упорного стержня, с момента, в который скорость вращения цилиндрического вращающегося элемента 4 замедляется ③, как показано на фиг.44, и детектируется регенерация удара для отвинчивания резьбы.
Угол вращения элемента 7 детектирования вращения или угол ΔК2 отвинчивания резьбы резьбового элемента 9, образовавшийся в течение замедления с начала замедления ③ до конца удара, детектируется элементом 7 детектирования вращения и детектирующими датчиками 8а, 8b тем же способом, что упомянут выше.
После этого, каждый раз, когда цилиндрический вращающийся элемент 4 замедляется ③ посредством удара после свободного вращения углы ①, ΔК отвинчивания резьбы резьбового элемента 9, образовавшиеся в течение замедления ③ с начала замедления до конца удара, интегрируются последовательно блоком 13 центрального процессора тем же самым способом. Затем, когда интегрированный угол углов отвинчивания резьбы достигает предварительно установленного угла отвинчивания резьбы резьбового элемента 9, блок 14 выведения сигнала угла вращения выводит сигналы в блок 16 управления электроклапаном через блок 15В детектирования законченного отвинчивания резьбы, чтобы остановить электроклапан 19 через выходную схему 17. Эта операция также может быть реализована при помощи логической схемы или программного обеспечения.
Вышеописанный способ управления представляет собой способ управления ударным гайковертом так, чтобы он мог автоматически приостанавливаться после того, как резьбовой элемент, который не может быть легко отвинчен с маленьким вращающим моментом, отвинчивался под предварительно установленным углом отвинчивания резьбы (например угол, равный 5 оборотам после первого удара).
Когда резьбовой элемент при необходимости отвинчивается далее, ударный гайковерт может использоваться снова.
Ниже описывается способ управления, используемый для затянутого резьбового элемента, который может быть отвинчен вручную после отвинчивания с некоторым большим вращающим моментом. В данном способе управления, ударный гайковерт управляется таким образом, что он может быть приведен в состояние приостановки в момент времени, в который резьбовой элемент вращается заданное число раз после отвинчивания посредством генерации некоторого числа ударов.
В этом случае, после некоторого числа ударов вращающий момент отвинчивания резьбы становится меньшим, чем рабочий вращающий момент ударного гайковерта, так, что после удара, ведомый вал 6 продолжает вращаться в направлении отвинчивания резьбы без уменьшения до нуля скорости вращения в направлении отвинчивания резьбы. Если это состояние продолжается, то болт или гайка могут выпасть, так что необходимо остановить функционирование ударного гайковерта на предварительно установленном угле отвинчивания резьбы (например угол, равный 5 дополнительным оборотам после первого удара задается без обратного вращения).
Для выполнения этого необходимо детектировать первый удар без обратного вращения. Первый удар без обратного вращения подразумевает такой удар, что даже, когда цилиндрический вращающийся элемент 4 вращается свободно более одного оборота, скорость вращения не уменьшается до нуля или направление вращения не меняется на обратное.
В таком случае, как показано на фиг.46(а), после первого удара без обратного вращения (Р2) скорость вращения сначала замедляется (Р3), а затем ускоряется (Р4) снова. Фиг.46(b) изображает диаграмму совокупного суммарного угла отвинчивания резьбы.
Таким образом, для детектирования первого удара без обратного вращения требуется детектировать, что после удара скорость вращения не уменьшается до нуля или что направление вращения не изменяется на обратное при вращении цилиндрического вращающегося элемента 4 на 360 градусов. Практически, из-за некоторых факторов типа биения требуется детектировать, что после удара направление вращения не изменяется на обратное за два оборота (вращение на 720 градусов).
Это условие достаточно для цилиндрического вращающегося элемента 4, разработанного таким образом, чтобы обеспечить один удар за один его оборот. Однако, например, для цилиндрического вращающегося элемента, разработанного, чтобы обеспечить два удара за оборот, первый удар без обратного вращения означает, что даже, когда цилиндрический вращающийся элемент 4 вращается на 180 градусов после удара, скорость вращения не уменьшается до нуля или направление вращения не изменяется на обратное. Если скорость вращения не уменьшается до нуля или направление вращения не изменяется на обратное при вращении цилиндрического вращающегося элемента 4 на 360 градусов, то удар может быть оценен как первое удар без обратного вращения даже, когда учитывается биение. В дальнейшем дается ссылка на цилиндрический вращающийся элемент 4, выполненный таким образом, чтобы обеспечить один удар за один его оборот.
По этой причине, обеспечивается счетчик для генерации импульса каждый раз, когда детектируются удары, как показано на фиг.46(с), и также для интегрирования импульсов против часовой стрелки посредством этого генерированного импульса, причем счетчик выполнен так, чтобы повторно устанавливаться сигналом Qo или Q1, когда направление вращения меняется на обратное, как показано на фиг.46(d).
Далее счетчик выполнен так, чтобы продолжить счет без повторной установки на ноль, так чтобы оценить предыдущий удар как первый удар без обратного вращения в момент, в который счетчик проинтегрировал импульсы против часовой стрелки, соответствующие двум оборотам (вращение на 720 градусов).
С такой конструкцией может детектироваться первый удар без обратного вращения.
Затем счетчик далее продолжает интегрировать импульсы против часовой стрелки. В момент времени (P5), в который счетчик проинтегрирует импульсы, соответствующие 5 оборотам (5×360°), сигналы выводятся из блока 14 выведения сигнала угла вращения в блок 16 управления электроклапаном через блок 15В детектирования законченного отвинчивания резьбы, чтобы остановить электроклапан 19 через выходную схему 17. Такая операция также может быть реализована при помощи логической схемы или программного обеспечения.
Таким образом, функционирование ударного гайковерта останавливается в момент времени, при котором интегрированные импульсы против часовой стрелки достигают предварительно установленного угла отвинчивания резьбы, так чтобы была предотвращена возможная проблема настолько сильного отвинчивания болта и гайки, что они могут выпасть.
Далее со ссылкой на фиг.18 будет описан один из импульсных гайковертов, в котором при ударе обратное вращение не производится и который является другим примером инструмента отвинчивания резьбы с ручным приводом, используемым в настоящем изобретении. Следует отметить, что описанный здесь импульсный гайковерт является типом инструментов затягивания резьбы с ручным приводом, которые применимы как для затягивания резьбы, так и для отвинчивания резьбы. Когда ударный гайковерт используется для отвинчивания резьбы, он представлен в виде одного варианта воплощения инструмента отвинчивания резьбы с ручным приводом согласно формуле изобретения.
Сначала гнездо, подогнанное к переднему торцу ведомого вала 6, подгоняется к резьбовому элементу 9 для отвинчивания, и заданный угол отвинчивания резьбы предварительно вводится в блок 15В детектирования законченного отвинчивания резьбы. После этого открывается электроклапан 19 и клапан переключения импульсного гайковерта переключается на сторону отвинчивания резьбы. Затем, когда рычаг управления 20 нажимается для подачи сжатого воздуха в импульсный гайковерт, так чтобы вращать пневматический двигатель 2А в направлении отвинчивания резьбы (в направлении против часовой стрелки для правостороннего резьбового элемента), масляный цилиндр 4А вращается в направлении отвинчивания резьбы с ускорением под действием вращающего момента со стороны пневматического двигателя 2А. Как показано на фиг.47, после того, как лопасти 55 и выступающие части 56 приводятся в тесный контакт с герметизирующими поверхностями 51, 52 маслонепроницаемым способом, соответственно, создается камера Н высокого давления, чтобы передать вращающий момент К стороне ведомого вала 6А с помощью удара, так чтобы повернуть ведомый вал 6А в направлении отвинчивания резьбы на некоторый угол. В это время масляный цилиндр 4А начинает замедляться и в середине замедления угол вращения масляного цилиндра 4А или угол затягивания резьбы резьбового элемента 9, образованный ведомым валом 6А, детектируются элементом 7 детектирования вращения и детектирующими датчиками 8а, 8b, как упомянуто ниже.
В середине замедления масляного цилиндра 4А обеспечивается отвинчивание резьбы. Ниже будет описан способ детектирования и вычисления угла завинчивания или угла вращения резьбового элемента во время замедления.
Маслонепроницаемое состояние обеспечивается, когда масляный цилиндр 4А наклоняется назад под некоторым углом М к ведомому валу 6А, и маслонепроницаемое состояние исчезает, когда масляный цилиндр 4А наклоняется вперед под некоторым углом N к ведомому валу 6А, как показано на фиг.48 (a), (b). Эти углы М, N является углами, задаваемыми в конструкции импульсного гайковерта, и взаимосвязь между этими углами образуется даже тогда, когда масляный цилиндр 4А и ведомый вал 6А вращаются вместе в середине маслонепроницаемого состояния, чтобы отвинчивать резьбовой элемент 9.
Далее, со ссылкой на фиг.49 и 50, будет описано вращение ведомого вала 6А в середине замедления масляного цилиндра 4А.
В момент a2 маслонепроницаемое состояние обеспечивается масляным цилиндром 4А и ведомым валом 6А и масляный цилиндр 4А начинает замедление. В это время ведомый вал 6А сохраняется в состоянии приостановки. С этого момента времени масляный цилиндр 4А начинает сжимать масло. Когда масляный цилиндр сначала вращается под углом М, чтобы соответствовать по фазе ведомому валу 6А, и затем вращается далее под углом g1, чтобы сжимать масло, генерируется ударный вращающий момент, превышающий нагрузку вращающего момента ведомого вала 6А. С этого момента времени А3 масляный цилиндр 4А и ведомый вал 6А вращаются вместе под одинаковым углом ΔG1, соответственно, при сохранении разности угловой фазы g1. Величина разности угловой фазы g1 изменяется в соответствии с вращающим моментом нагрузки стороны ведомого вала 6А. На ранней стадии отвинчивания резьбового элемента 9 угол велик, и он уменьшается по ходу процесса отвинчивания резьбового элемента 9.
В то время как разность угловой фазы g1 представлена углом, образованным относительно направления отвинчивания резьбы (угол вращения против часовой стрелки) на фиг.50, могут иметься случаи, в которых угол g1 является нулевым или его абсолютное значение является отрицательным значением меньше М.
Другими словами, могут иметься случаи, в которых в момент времени, когда, или прежде, чем масляный цилиндр 4А и ведомый вал 6А будут соответствовать по фазе друг другу после того, как обеспечивается маслонепроницаемое состояние, масляный цилиндр 4А и ведомый вал 6А вращаются вместе.
В момент времени А4, когда ударный вращающий момент, генерируемый дифференциальным давлением между камерой Н высокого давления и камерой L низкого давления, производимым внутри масляной камеры 4А, становится относительно меньше, чем вращающий момент нагрузки на стороне нагрузки, ведомый вал 6А прекращает вращаться, а масляный цилиндр 4А продолжает вращаться с замедлением до момента времени A5, в который исчезает маслонепроницаемое состояние.
В момент времени А4 масляный цилиндр 4А опережает по фазе ведомый вал 6А на угол g1. Соответственно, требуется чтобы масляный цилиндр 4А вращался под углом (N-g1) до момента времени A5, в который исчезает маслонепроницаемое состояние. Таким образом, после вращения под углом (М+g1) в пределах угла Z1 в диапазоне от момента времени А2 до момента времени A5, которые можно детектировать вышеупомянутым способом, масляный цилиндр 4А вращается вместе с ведомым валом 6А под углом ΔG1. После этого только масляный цилиндр 4А вращается далее под углом (N-g1).
Сумма этих углов представляет собой угол вращения Z1 масляного цилиндра 4А в диапазоне от момента времени A2 до момента времени A5. Угол Z1 представляет собой сумму углов М, N и ΔG1, как дано в уравнении (3). Как упоминалось выше, углы М и N представляют собой значения, которые могут быть заданы в конструкции. Там, где δ представляет собой сумму этих углов, угол вращения ведомого вала 6А от момента времени A2 до момента времени A5, другими словами, угол отвинчивания резьбы ΔG1 резьбового элемента 9 может быть определен путем вычитания суммы δ углов из угла Z1 вращения масляного цилиндра 4А в диапазоне от момента бремени А2 до момента времени A5.
Поскольку способ детектирования угла отвинчивания резьбы резьбового элемента 9, определяемого ведомым валом 6А при помощи элемента 7 детектирования вращения и детектирующих датчиков 8а, 8b, использует основной метод, идентичный по содержанию, описанному ранее со ссылкой на фиг.24-30, то его конкретное описание опускается. Вышеописанный способ управления представляет собой способ управления масляным импульсным гайковертом так, чтобы он мог автоматически приостанавливаться после того, как резьбовой элемент, который не может быть легко отвинчен с маленьким вращающим моментом, отвинчивался под предварительно установленным углом отвинчивания резьбы (например угол, равный 5 оборотам после первого удара). Когда резьбовой элемент при необходимости отвинчивается далее, импульсный гайковерт может использоваться снова.
Ниже описывается способ управления, используемый для затянутого резьбового элемента, который может быть отвинчен вручную после отвинчивания с некоторым большим вращающим моментом. В способе управления импульсный гайковерт управляется таким образом, что он может быть автоматически приведен в состояние приостановки в момент времени, в который резьбовой элемент вращается заданное число раз после отвинчивания посредством генерации некоторого числа ударов.
В этом случае, после некоторого числа ударов вращающий момент отвинчивания резьбы становится меньшим, чем рабочий вращающий момент импульсного гайковерта, так, что после удара, ведомый вал 6А способен продолжать вращаться в направлении отвинчивания резьбы без замедления ниже пороговой скорости вращения в направлении отвинчивания резьбы. Если это состояние вращения продолжается, то болт или гайка могут выпасть. Соответственно, необходимо остановить функционирование импульсного гайковерта на предварительно установленном угле отвинчивания резьбы (например, угол, равный 5 дополнительным оборотам после первого удара не меньшего, чем пороговое значение).
Для выполнения этого необходимо детектировать генерацию первого удара не меньшего, чем пороговое значение. Первый удар не меньший, чем пороговое значение, подразумевает такой удар, что даже, когда масляный цилиндр 4А вращается свободно более одного оборота, скорость вращения не уменьшается ниже порогового значения.
В таком случае, как показано на фиг.51 (а), после первого удара (Р2), не меньшего, чем пороговое значение, скорость вращения сначала замедляется (Р3), а затем ускоряется (Р4) снова. Фиг.51(б) изображает диаграмму совокупного суммарного угла отвинчивания резьбы.
Таким образом, для детектирования первого удара, не меньшего, чем пороговое значение, требуется детектировать то, что после удара скорость вращения не уменьшается ниже порогового значения при вращении масляного цилиндра 4А на 360 градусов. Практически, из-за некоторых факторов, например, типа биения, требуется детектировать, что после удара скорость вращения не уменьшается ниже порогового значения за два оборота (вращение на 720 градусов).
Это условие достаточно для того, чтобы разработанный масляный цилиндр 4А обеспечивал один удар за один его оборот. Однако, например, для масляного цилиндра 4А, разработанного таким образом, чтобы обеспечить два удара за оборот, первый удар, не меньший, чем пороговое значение, означает, что даже когда масляный цилиндр 4А вращается на 180 градусов после удара, скорость вращения не уменьшается ниже порогового значения. Если скорость вращения не уменьшается ниже порогового значения при вращении масляного цилиндра 4А на 360 градусов, то удар может быть оценен как первый удар, не меньший, чем пороговое значение даже тогда, когда учитывается биение. В дальнейшем делается ссылка на масляный цилиндр 4А, разработанный таким образом, чтобы обеспечить один удар за один его оборот.
По этой причине, как показано на фиг.51(в), обеспечивается счетчик для генерации импульсов каждый раз, когда детектируется начальный момент замедления, и также для интегрирования импульсов против часовой стрелки посредством этих генерированных импульсов. Счетчик выполнен так, чтобы повторно устанавливаться на ноль сигналом Q0 или Q1, когда направление вращения уменьшается ниже порогового значения, как показано на фиг.51 (d).
Далее счетчик выполнен так, чтобы продолжить счет без повторной установки на ноль, так, чтобы оценить предыдущий удар как первый удар, не меньший, чем пороговое значение, в момент, в который счетчик проинтегрировал импульсы против часовой стрелки, соответствующие двум оборотам (вращение на 720 градусов).
С такой конструкцией может детектироваться первый удар, не меньший, чем пороговое значение.
Затем, счетчик продолжает далее интегрировать импульсы против часовой стрелки. В момент времени (P5), в который счетчик интегрирует импульсы, соответствующие 5 оборотам (5×360°), сигналы выводятся из блока 14 выведения сигнала угла вращения в блок 16 управления электроклапаном через блок 15В детектирования законченного отвинчивания резьбы, для того, чтобы остановить электроклапан 19 через выходную схему 17. Эта операция также может быть реализована при помощи логической схемы или программного обеспечения.
Таким образом, функционирование импульсного гайковерта останавливается в момент времени, в который интегрированные импульсы против часовой стрелки достигают предварительно установленного угла отвинчивания резьбы, так, чтобы была предотвращена возможная проблема настолько сильного отвинчивания болта и гайки, при котором они могут выпасть.
На фиг.51 момент времени Р2 является моментом времени, в который масляный цилиндр 4А начинает замедляться, а момент времени Р2' является моментом времени, в который ведомый вал 6А начинает вращаться вместе с масляным цилиндром 4А и с которого после подтверждения первого удара, не меньшего, чем пороговое значение, они продолжают вращаться вместе до предварительно установленного угла отвинчивания резьбы.
В период от момента времени Р2 до момента времени P2' ведомый вал 6А остается в стационарном состоянии и угол вращения только масляного цилиндра 4А во время этого периода составляет менее 10°С точки зрения степени точности угла отвинчивания резьбы, даже тогда, когда резьбой элемент и ведомый вал 6А вращаются от момента времени Р2, это практически не представляет проблемы.
Элемент 7 детектирования вращения в ударном гайковерте может быть жестко установлен на внешней периферии цилиндрического вращающегося элемента 4 или масляного цилиндра 4А в виде вращающегося элемента, интегрального с последним, как показано на фиг.1 и 18. Альтернативно, элемент детектирования вращения может быть установлен на торцевой части вала пневматического двигателя 2 или 2А, интегрально с ним, как показано на фиг.52. Дополнительно, элемент 7 детектирования вращения может быть установлен на вращающемся валу, способном вращаться с пневматическим двигателем в любом его положении между пневматическим двигателем и вращающимся элементом.
Средства детектирования и средства управления, содержащие элемент 7 детектирования вращения, датчики 8а, 8b, входную схему 10, блок 11 усиления, блок 12 формирования формы сигнала, блок 13 центрального процессора, блок 14 выведения сигнала угла вращения, блок 15 детектирования законченного затягивания резьбы, блок 15 детектирования законченного отвинчивания резьбы, блок 16 управления электроклапаном, выходную схему 17 и электроклапан 19, применимы не только к вышеописанным ударному гайковерту и к масляному импульсному гайковерту, но также и к ударным гайковертам, раскрытым в японской патентной публикации №Sho 61-7908 и в американских патентах №2285638, 2160150, 3661217, 3174597, 3428137 и 3552499, а также к ударным гайковертам, имеющим подобный механизм сцепления. Далее средства детектирования и средства управления широко применимы к другим типам ударных гайковертов. Соответственно, средства детектирования и средства управления применимы к управлению отвинчиванием резьбы с использованием этих инструментов.
Кроме того, они применимы к гайковерту как инструменту отвинчивания резьбы для статической передачи вращающего момента, один пример которого иллюстрируется на фиг.53(а). На фиг.53(а) вращение, генерируемое в двигателе 110, замедляется посредством планетарной зубчатой передачи 120, а также вращающий момент увеличивается и передается к ведомому валу 130 таким образом, чтобы затягивать или отвинчивать резьбовой элемент, подогнанный в гнездо 140, способное вращаться вместе с ведомым валом 130.
Гайковерт является одним из видов инструмента отвинчивания резьбы ручного привода согласно формуле изобретения. Двигатель 110 является одним из видов средства генерации вращающего момента согласно формуле изобретения. Планетарная зубчатая передача 120 является одним из видов механизма передачи вращающего момента согласно формуле изобретения.
Ссылочный номер 150 обозначает блок детектирования импульсов как один из видов средства детектирования согласно формуле изобретения для детектирования угла вращения двигателя 110 и вычисления угла отвинчивания резьбы на основе детектируемого угла. Блок 150 детектирования импульсов можно обеспечить интегрально с двигателем 110, как показано на фиг.53(а). Альтернативно, ее можно обеспечить на выходной стороне планетарной зубчатой передачи 120, как показано на фиг.55(b). Далее, ее можно обеспечить интегрально с ведомым валом 130.
Ссылочный номер 160 на фиг.53(а), (b) обозначает несущий механизм силы отдачи для приема отдачи, генерируемой, когда ведомый вал 130 вращается с высоким вращающим моментом. Несущий механизм 160 силы отдачи предназначен для насадки на другую гайку крепления колеса с намеченной гайки крепления колеса для несения силы отдачи, когда гайковерт используется для затягивания или отвинчивания резьбового элемента, например, типа гайки крепления колеса автомобильной покрышки.
На фиг.54 изображен график зависимости между функционированием двигателя 110 интегрального с блоком 150 детектирования импульсов и импульсными сигналами в гайковерте фиг.53(а). В этом типе гайковерта, когда переключатель управления (не показан) отвинчиванием резьбы поворачивается, резьбовой элемент отвинчивается, например, на 1/2 оборота (50 оборотов двигателя 110) после того, как он начинает отвинчиваться (в случае, когда ведомый вал 130 разработан так, чтобы вращаться один раз на каждые 100 оборотов двигателя 110), и сначала увеличивается скорость вращения двигателя 110, и затем он вращается с высокой скоростью. Когда совокупное суммарное число угла вращения достигает предварительно установленного числа оборотов (например, 5 оборотов резьбового элемента или 500 оборотов двигателя 110), гайковерт управляемо останавливается.
В случае гайковерта без несущего механизма 160 силы отдачи, как показано на фиг.55(b), устанавливается число оборотов для отвинчивания резьбы, учитывая некоторые факторы, такие как биение.
При детектировании угла вращения на фиг.53(а) и 55(b), после того, как переключатель управления отвинчиванием резьбы поворачивается, начинает накапливаться число импульсов в направлении отвинчивания резьбы из блока 150 детектирования импульсов. Затем совокупное суммарное число импульсов преобразуется в угол вращения, таким образом, что, когда он достигает предварительно установленного угла вращения, вращение останавливается. В случае, когда управление отвинчиванием резьбы не выполняется, переключатель управления отвинчиванием резьбы остается в положении ВЫКЛ.
Со ссылкой на фиг.56 будет описан способ, в котором в гайковерте, как инструменте отвинчивания резьбы, детектируется вращающий момент вращательной нагрузки, необходимый для того, чтобы ведомый вал 130 вращался в направлении отвинчивания резьбы, так, чтобы, когда резьбовой элемент отвинчивается до заданного вращающего момента, вращение можно было остановить.
В этом способе используется гайковерт с устройством детектирования вращающего момента вращательной нагрузки, типа тензометра, показанный на фиг.53(b) и 55(а).
Устройство детектирования вращающего момента вращательной нагрузки является одним из видов средства детектирования вращающего момента согласно формуле изобретения.
В этом виде, гнездо 140, подогнанное к переднему торцу ведомого вала 130, подгоняется к резьбовому элементу 9 для отвинчивания, и переключатель (не показан) управления отвинчиванием резьбы поворачивается. После этого рычаг управления 20 действует для передачи вращающего момента, генерируемого в двигателе 110, к ведомому валу 130 через планетарную зубчатую передачу 120. Вращающий момент двигателя 110 увеличивается посредством планетарной зубчатой передачи 120 и действует в направлении отвинчивания резьбы. На ранней стадии (P1) вращающий момент на стороне нагрузки больше, чем выходной вращающий момент (вращающий момент вращательной нагрузки) гайковерта, так что резьбовой элемент сохраняется в состоянии приостановки.
На этой стадии (P1) детектируемый выходной вращающий момент постепенно возрастает со значения, меньшего, чем предварительно установленный вращающий момент, и на некоторое время становится равным предварительно установленному вращающему моменту, а затем возрастает далее.
Когда детектируемый выходной вращающий момент некоторое время равен предварительно установленному вращающему моменту, двигатель 110 и планетарная зубчатая передача 120 устанавливаются в такое состояние, что они продолжают передавать вращающий момент к ведомому валу, в то время как выходной вращающий момент возрастает. В момент времени (Р2), в который выходной вращающий момент гайковерта соответствует вращающему моменту на стороне нагрузки, ведомый вал 130, который перемещается вместе с резьбовым элементом, начинает вращаться и резьбовой элемент начинает отвинчиваться, вследствие чего вращающий момент на стороне нагрузки уменьшается и выходной вращающий момент, соответствующий ему, также уменьшается (Р3). В момент времени (Р4), в который выходной вращающий момент соответствует предварительно установленному вращающему моменту в середине уменьшения выходного вращающего момента, двигатель 110 или планетарная зубчатая передача 120 останавливается.
В то время как отвинчивание резьбы может быть остановлено в момент времени (Р4), в который выходной вращающий момент достигает предварительно установленного вращающего момента, может быть принято другое управление, в котором момент времени (P4) используется как исходная точка отвинчивания резьбы, и число оборотов отсчитывается от этого момента времени, так, чтобы, когда число оборотов достигает предварительно установленного числа оборотов (например, 5 оборотов), двигатель или планетарная зубчатая передача останавливались. В этом управлении используется гайковерт, имеющий устройство детектирования вращающего момента вращательной нагрузки и устройство детектирования угла вращения.
Комбинация элемента 7 детектирования вращения и детектирующих датчиков 8а, 8b или блока 150 детектирования импульсов, которые реализованы как средство детектирования, согласно формуле изобретения, на ручном ударном гайковерте или ручном отвинчивающем инструменте, не ограничивается вышеупомянутой конструкцией. Вместо этого может использоваться элемент 7’ детектирования вращения, содержащий диск, имеющий регулярно расположенные по кругу прорези или светоотражающие элементы и пару фотоприемников 8а и 8b' для детектирования числа проходящих прорезей или числа светоотражающих элементов, таких как фотопрерыватели, как показано на фиг.57.
Вместо пневматического двигателя в качестве средства генерации вращающего момента могут свободно использоваться электрический двигатель, двигатель внутреннего сгорания и т.п.
Механизм передачи вращающего момента не ограничен механизмом передачи ударной силой в ударных гайковертах с вышеупомянутыми механизмами сцепления. Конечно, могут использоваться формы механизмов передачи вращающего момента, используемых в импульсном гайковерте и гайковерте, соответственно.
Способ управления ручным инструментом отвинчивания резьбы согласно настоящему изобретению может использоваться для управления отвинчиванием резьбы с использованием ручных инструментов затягивания резьбы, включая, например, ударный гайковерт, импульсный гайковерт, гайковерт, ударный копер, трещоточный гайковерт и копер-дрель.
Промышленная применимость
Как упоминалось выше, согласно способу считывания угла вращения резьбового элемента настоящего изобретения угол затягивания резьбы может быть определен посредством детектирования угла вращения, образованного в течение всего замедления или во время периода замедления вращающегося элемента, вызванного ударом, позволяя таким образом управлять силой затягивания резьбы до адекватной силы, соответствующей предварительно установленному углу затягивания резьбы.
На основании этого ударные гайковерты типа ручного ударного гайковерта, для которых не придавали значение точности затягивания из-за биений, несмотря на их широкое использование, легкость, высокую эффективность и высокую производительность, могут подойти очень близко к управлению затягиванием резьбы посредством угла завинчивания.
Согласно способу детектирования биения настоящего изобретения можно детектировать величину биения, генерируемого при работе затягивания резьбы с ручным ударным гайковертом, позволяя таким образом численно оценивать качество работы затягивания резьбы.
Согласно способу определения затягивания резьбы настоящего изобретения надежность затягивания резьбы можно определить, сравнивая угол биения с предварительно установленным допустимым углом, так что чрезмерное биение рассматривается как низкая надежность затягивания резьбы, а маленькое биение рассматривается как высокая надежность затягивания резьбы.
Согласно способу управления ручным отвинчивающим инструментом настоящего изобретения угол вращения ведомого вала в направлении отвинчивания резьбы при работе отвинчивания резьбы обеспечивается таким образом, чтобы, когда полный суммарный угол вращения достигает предварительно установленного угла, ведомый вал мог бы управляться так, чтобы прекратить вращение в направлении отвинчивания резьбы, а также чтобы предотвратить чрезмерное отвинчивание резьбового элемента, приводящее к его выпадению.
Согласно настоящему изобретению обеспечивается средство детектирования для детектирования изменения скорости вращения вращающегося элемента и его угла вращения и для обеспечения на основе изменения скорости вращения и угла вращения, детектируемых средством детектирования, угла вращения, образовавшегося в течение всего замедления или во время периода замедления вращающегося элемента в направлении отвинчивания резьбы от начала замедления до конца замедления, так, чтобы, когда суммарный угол вращения достигнет предварительно установленного угла, ведомый вал прекращал вращение в направлении отвинчивания резьбы, а также для того, чтобы предотвратить чрезмерное отвинчивание резьбового элемента, приводящее к его выпадению.
Согласно настоящему изобретению обеспечивается средство детектирования для детектирования изменения скорости вращения вращающегося элемента и его угла вращения и для обнаружения генерации удара при помощи средства детектирования, так, чтобы в случае ручного отвинчивающего инструмента, в котором обратное вращение генерируется после окончания замедления, когда вращающийся элемент снова начинает свободное вращение без обратного вращения после того, как детектируется генерация удара, или когда вращающийся элемент начинает снова свободно вращаться без уменьшения скорости вращения до нуля, вращение ведомого вала в направлении отвинчивания резьбы может управляемо останавливаться, когда вращающийся элемент вращается непрерывно под заданным предварительно установленным углом отвинчивания резьбы или под углом больше последнего, в то время как с другой стороны, в случае ручного отвинчивающегося инструмента, в котором обратное вращение не генерируется после окончания замедления, вращение ведомого вала в направлении отвинчивания резьбы может управляемо останавливаться, когда вращающийся элемент вращается непрерывно под заданным предварительно установленным углом отвинчивания резьбы или под углом больше последнего без уменьшения скорости вращения в направлении отвинчивания резьбы после окончания замедления ниже порогового значения, после того, как детектируется генерация удара, а также чтобы предотвратить чрезмерное отвинчивание резьбового элемента.
Согласно настоящему изобретению обеспечивается средство детектирования вращающего момента для детектирования вращающего момента вращательной нагрузки, необходимого для того, чтобы ведомый вал вращался в направлении отвинчивания резьбы, так, чтобы, когда вращающий момент вращательной нагрузки, детектируемый средством детектирования вращающего момента, уменьшится ниже предварительно установленного вращающего момента, ведомый вал прекращал вращение в направлении отвинчивания резьбы, а также для того, чтобы предотвратить чрезмерное отвинчивание резьбового элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНЫЙ ГАЙКОВЕРТ | 2011 |
|
RU2480323C2 |
| Гайковерт | 1986 |
|
SU1351769A2 |
| УДАРНЫЙ МЕХАНИЗМ РЕДКОУДАРНОГО ГАЙКОВЕРТА | 1992 |
|
RU2036781C1 |
| Пневматический гайковерт | 1979 |
|
SU887149A1 |
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2010 |
|
RU2532790C2 |
| Ударный гайковерт | 1981 |
|
SU973337A2 |
| ГАЙКОВЕРТ | 2011 |
|
RU2473417C1 |
| Ударный гайковерт | 1982 |
|
SU1147557A2 |
| РУЧНОЙ ИНСТРУМЕНТ С ОПОРНЫМ РЫЧАГОМ И УДЕРЖИВАЮЩИМ МЕХАНИЗМОМ И СПОСОБ ОСЛАБЛЕНИЯ КРЕПЕЖНЫХ СРЕДСТВ | 1998 |
|
RU2198087C2 |
| Ударный механизм гайковерта | 1983 |
|
SU1134359A1 |
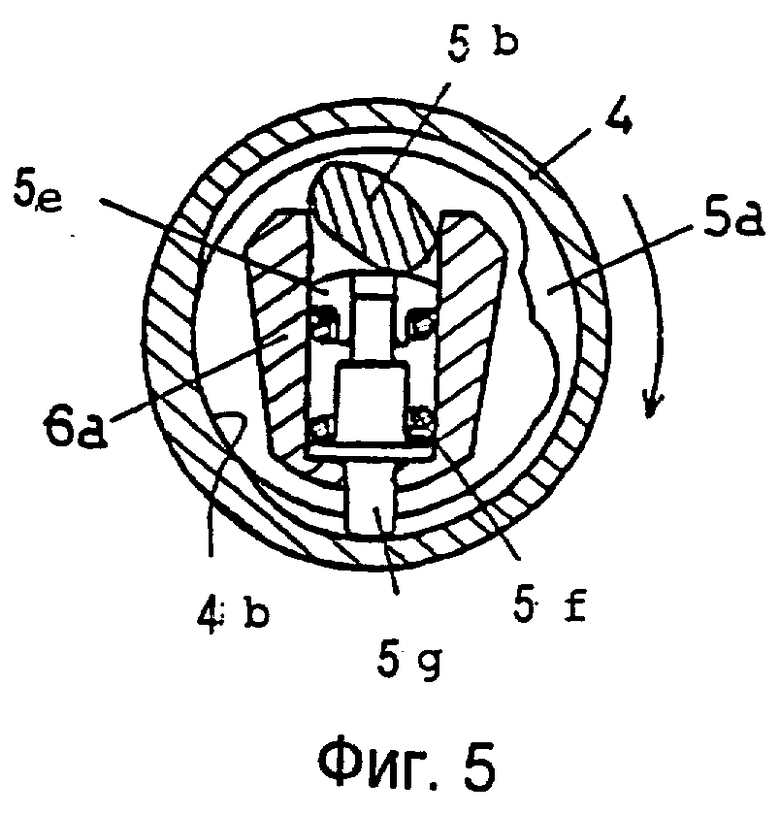
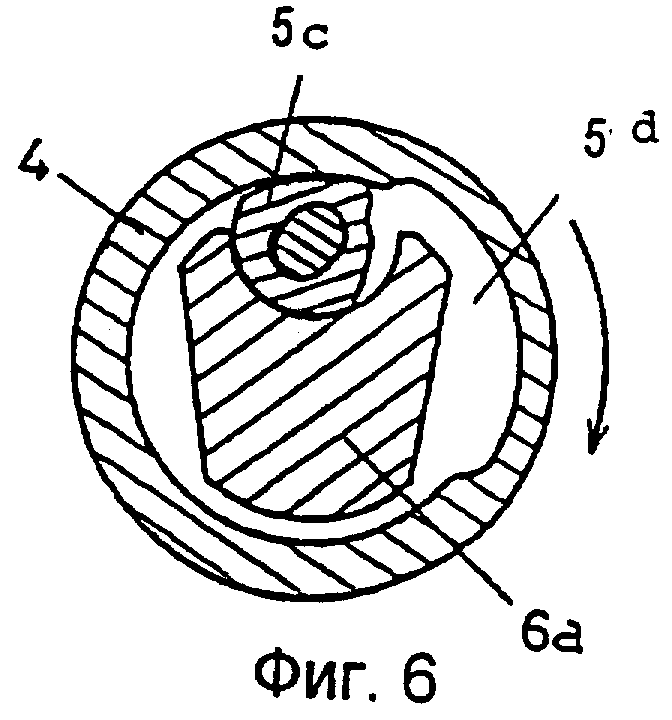
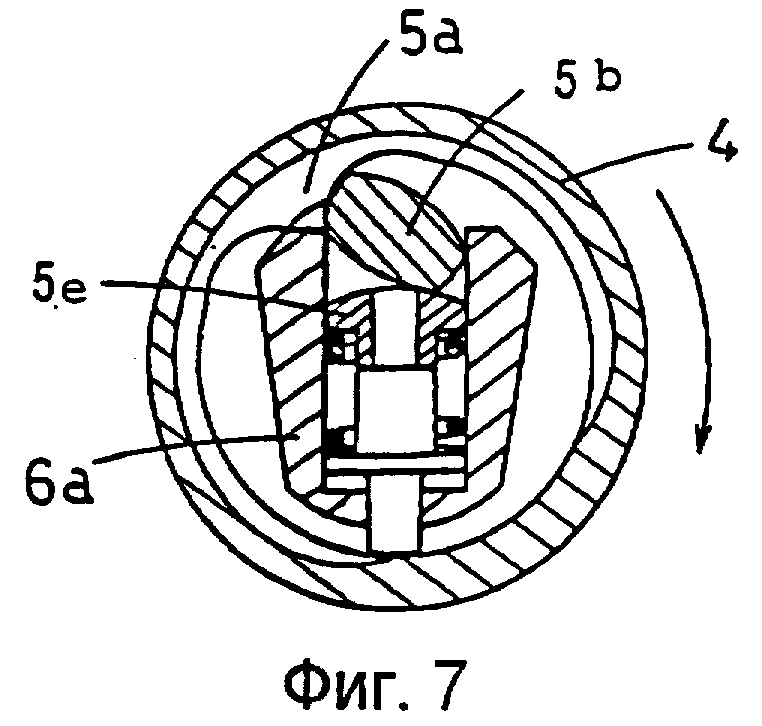
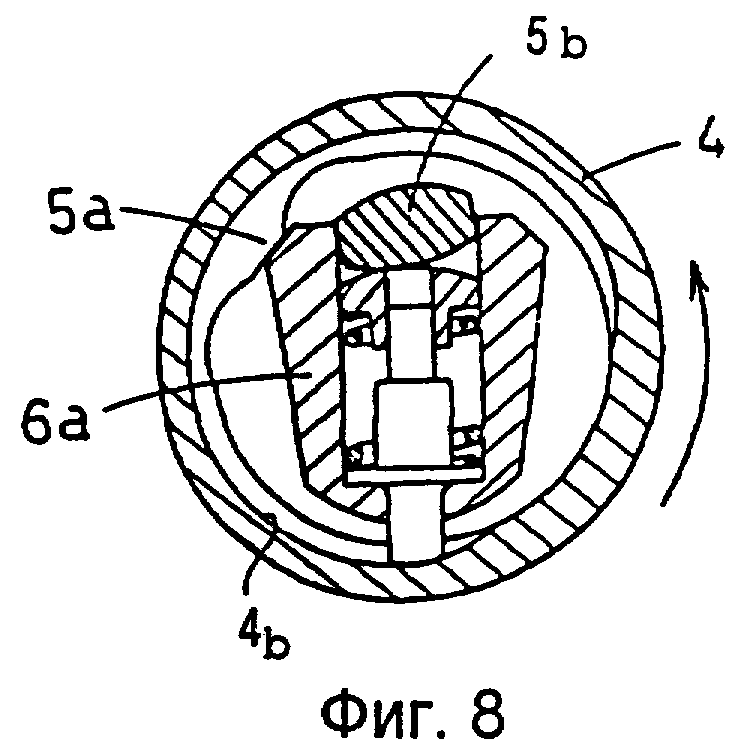
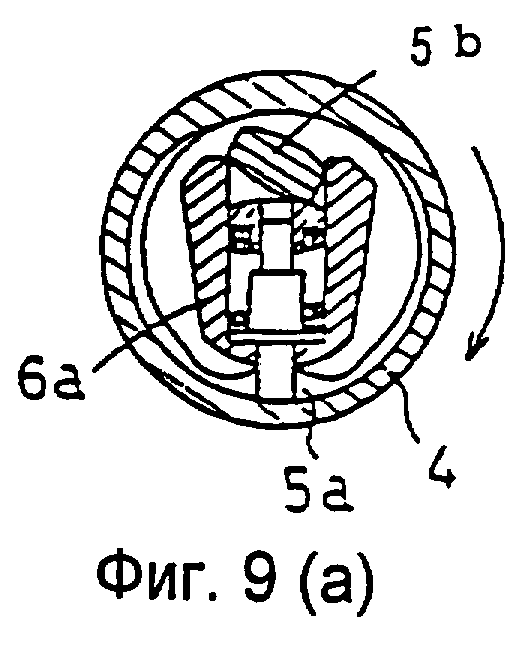
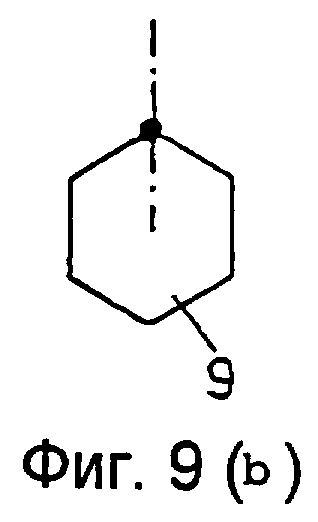
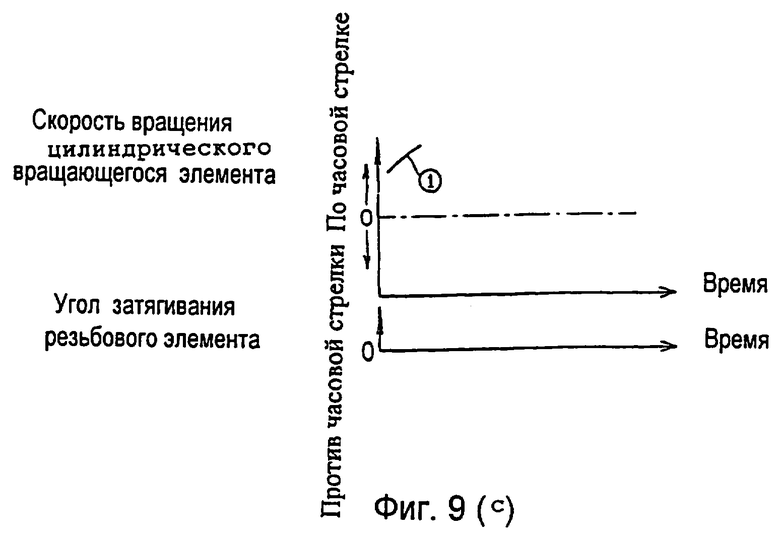
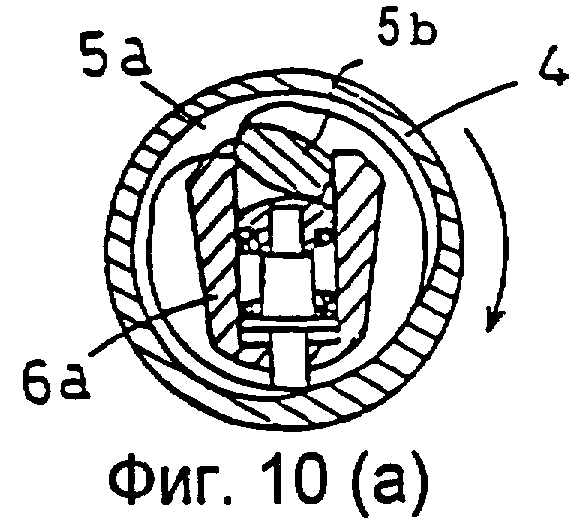
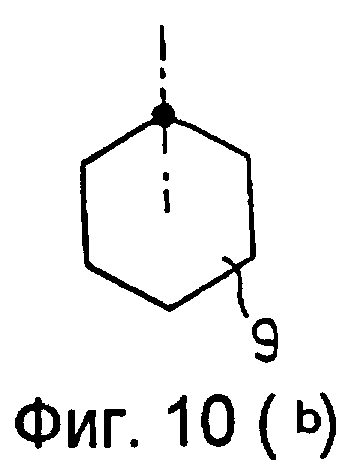
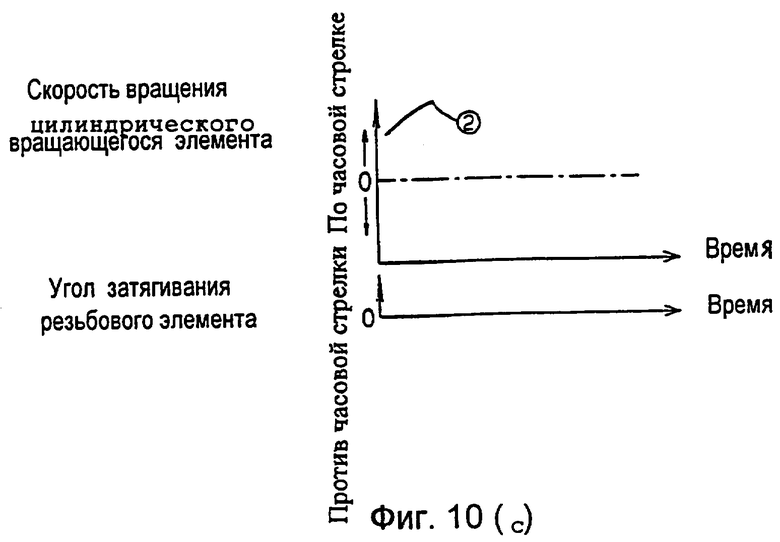
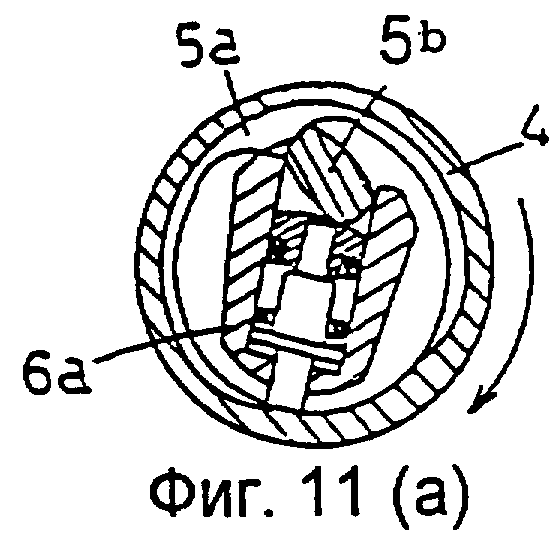
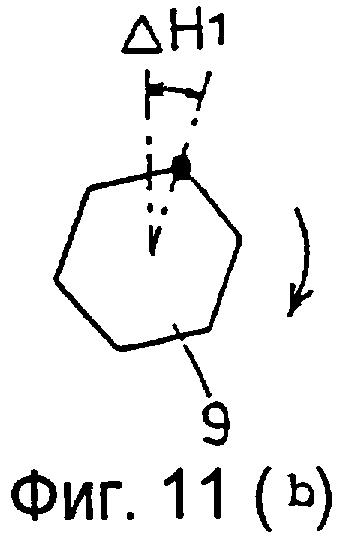
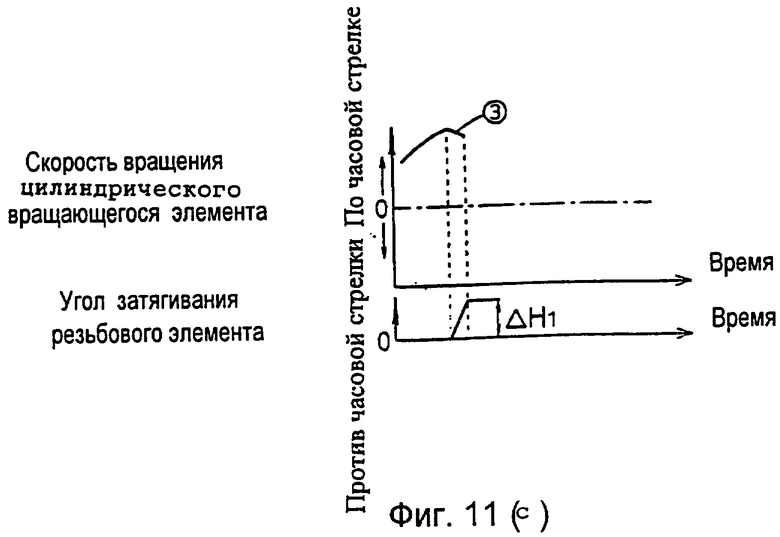
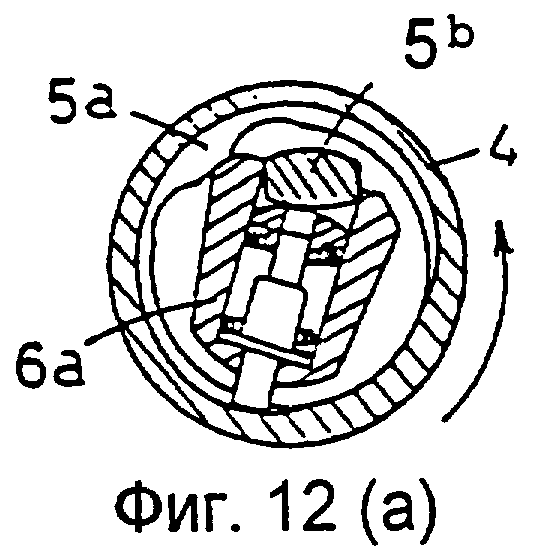
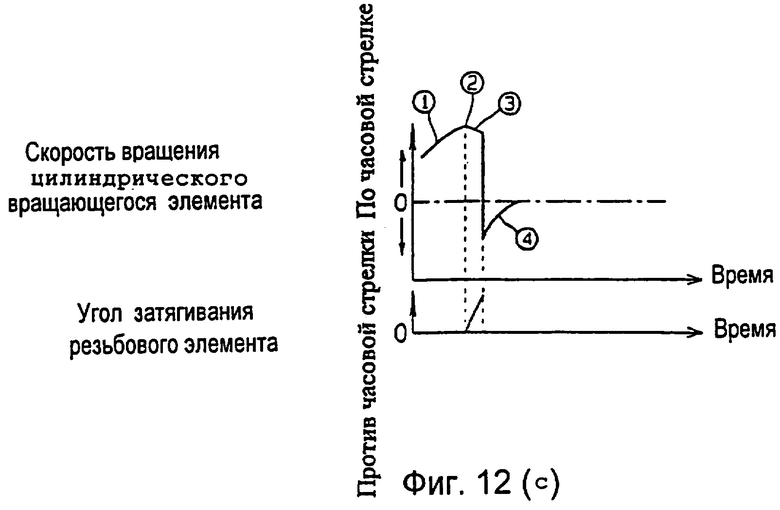
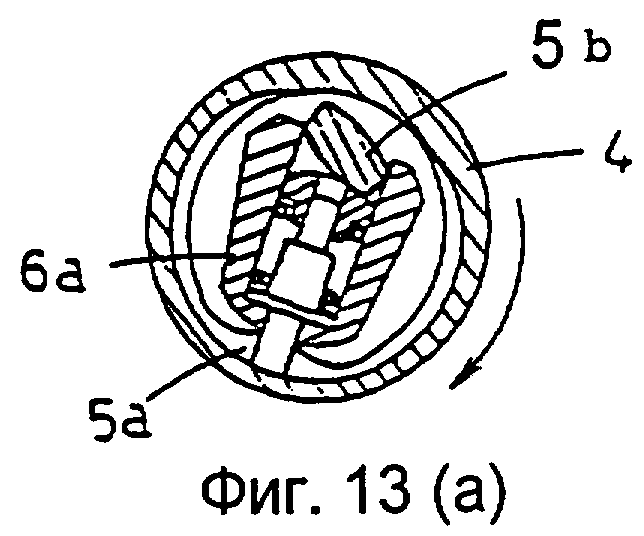
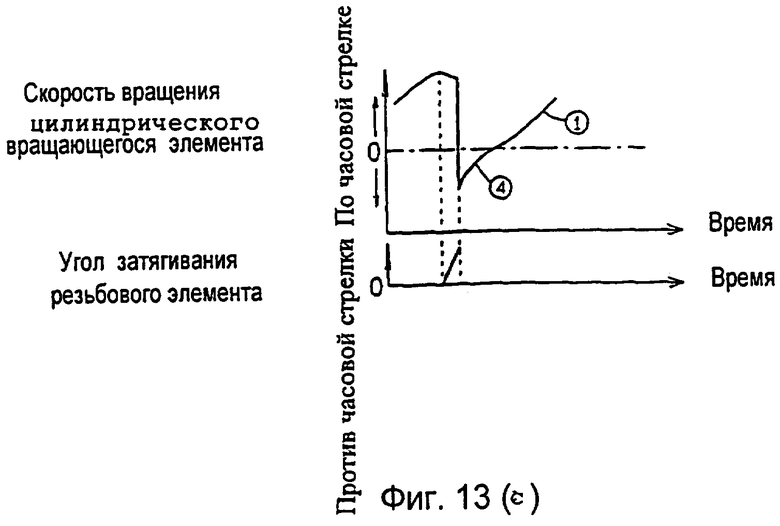
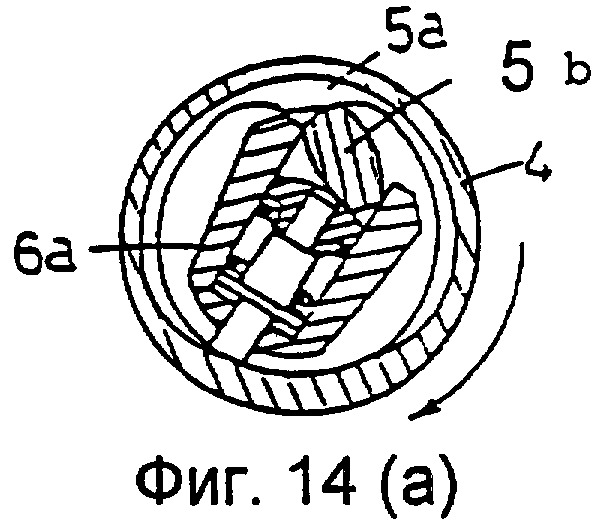
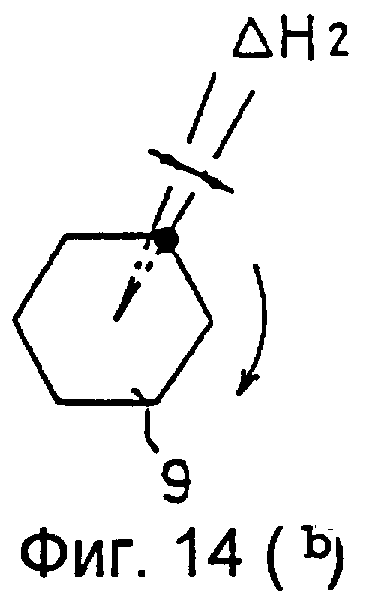
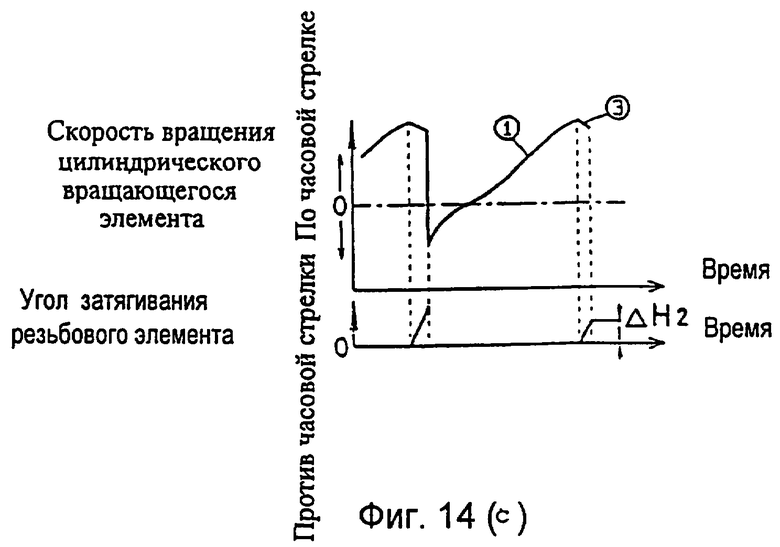
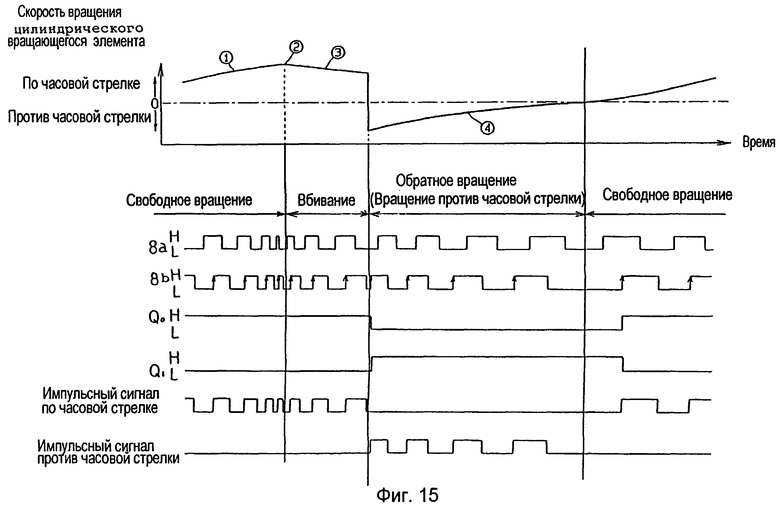
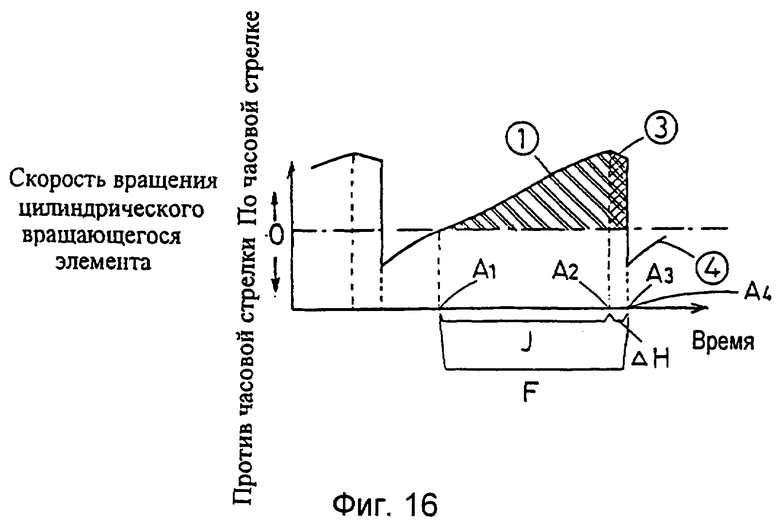
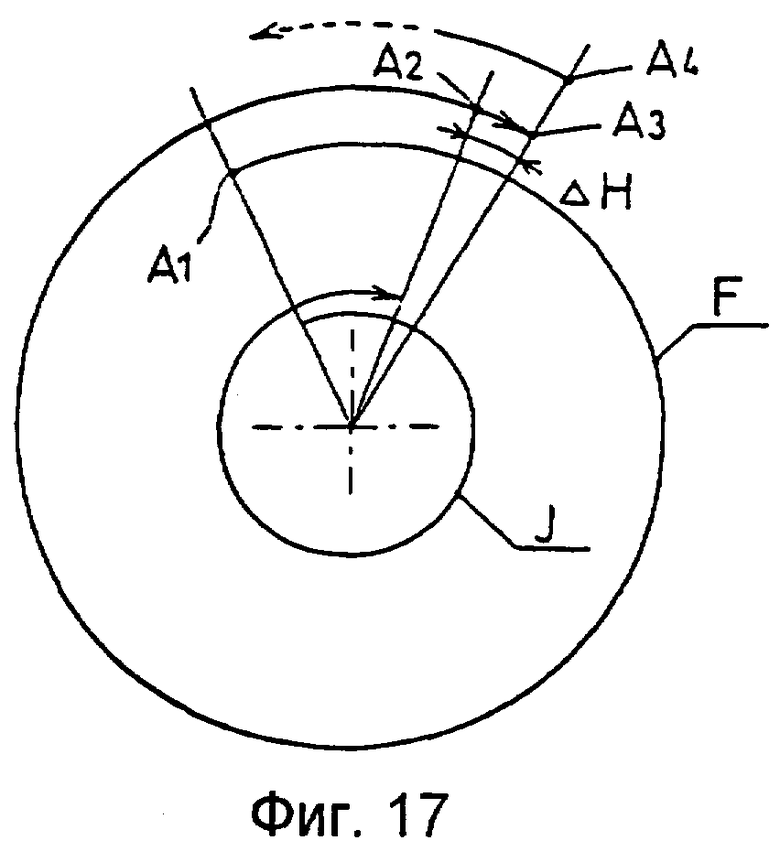
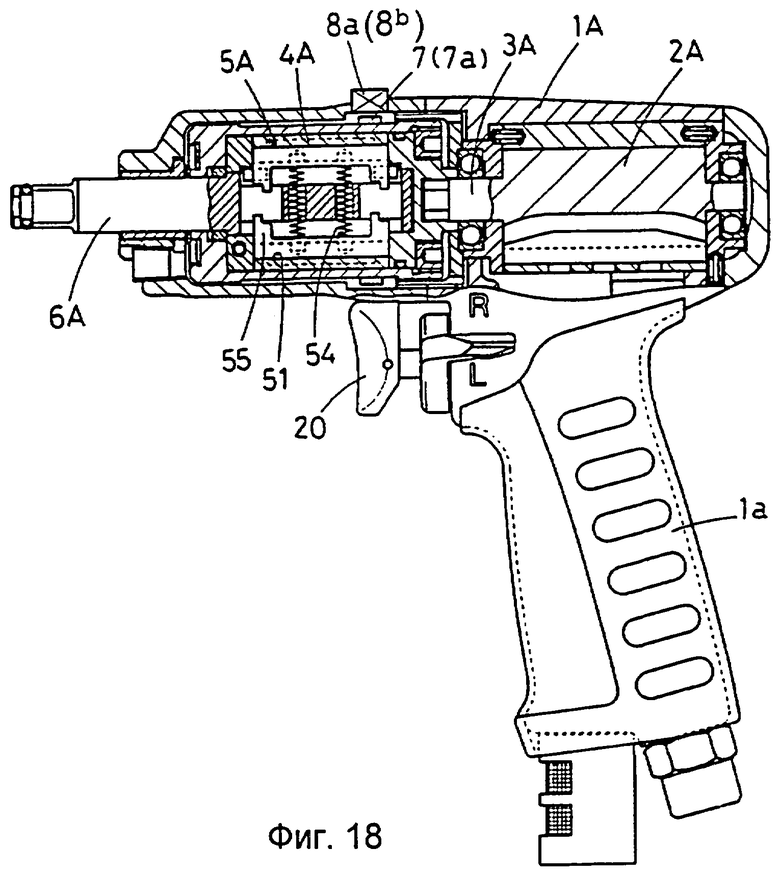
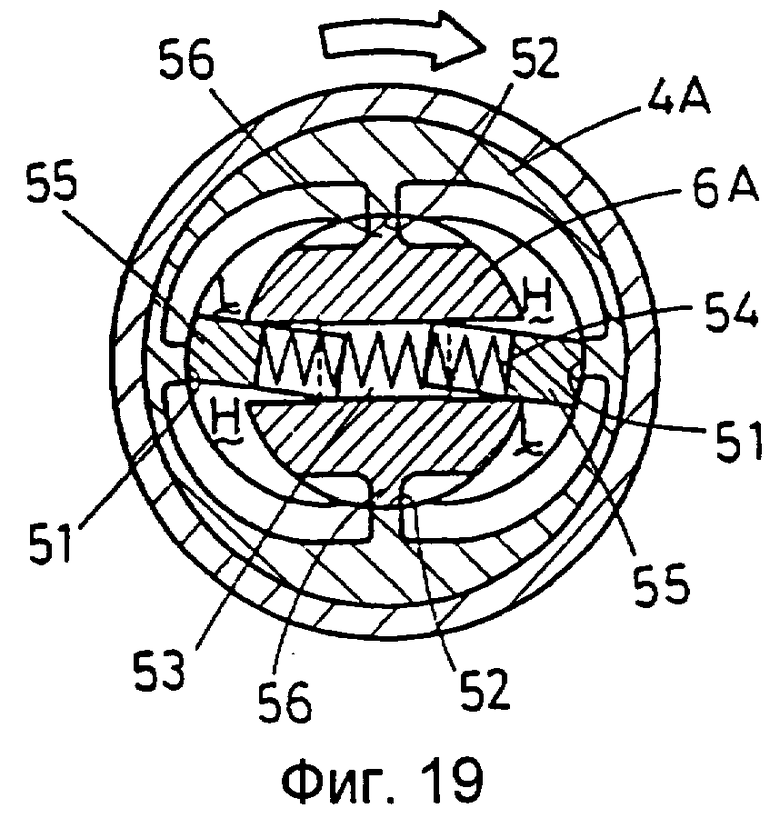
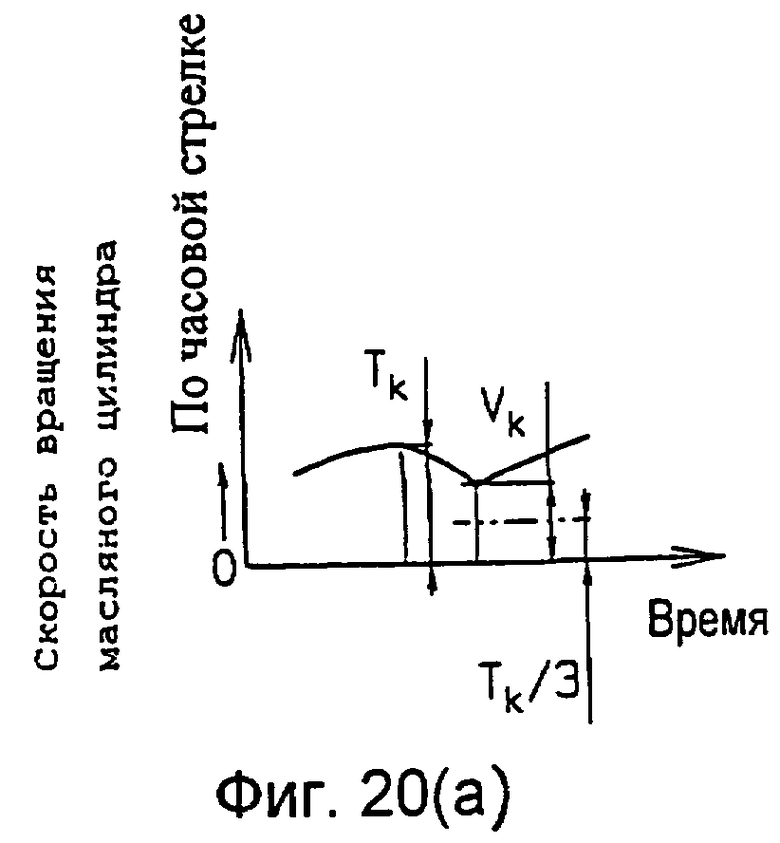
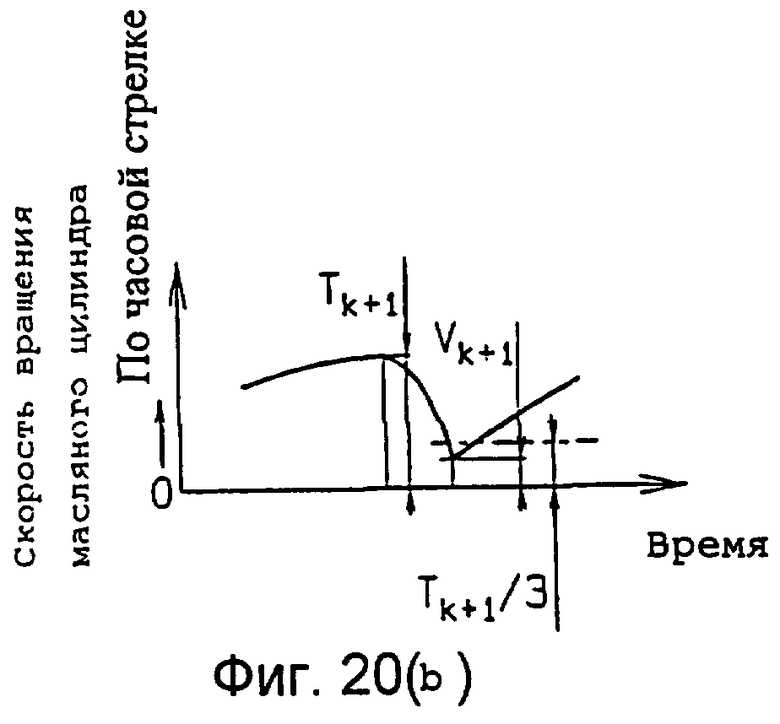
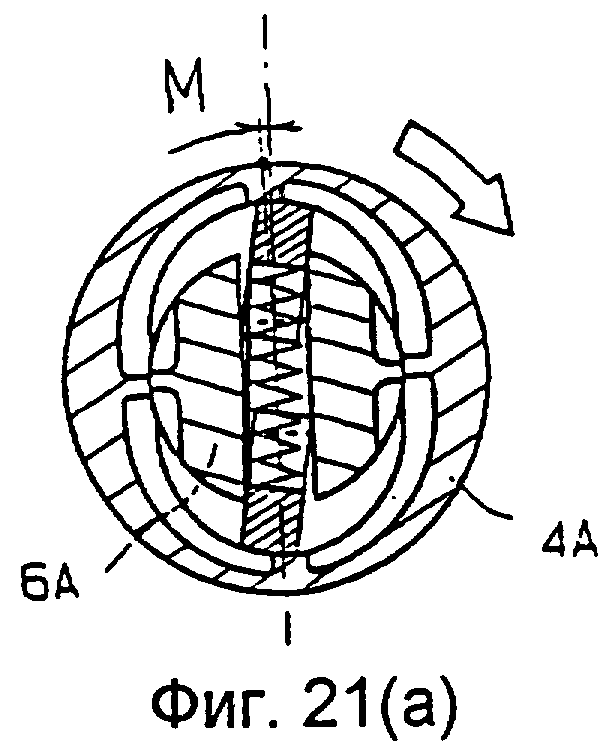
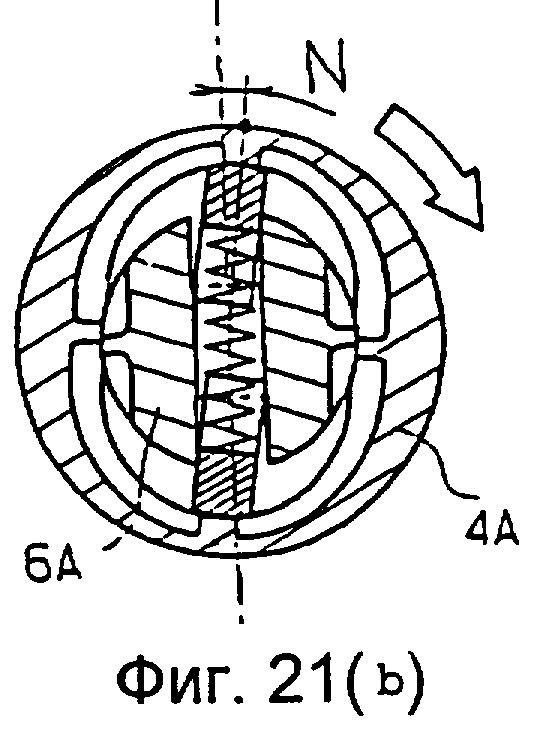
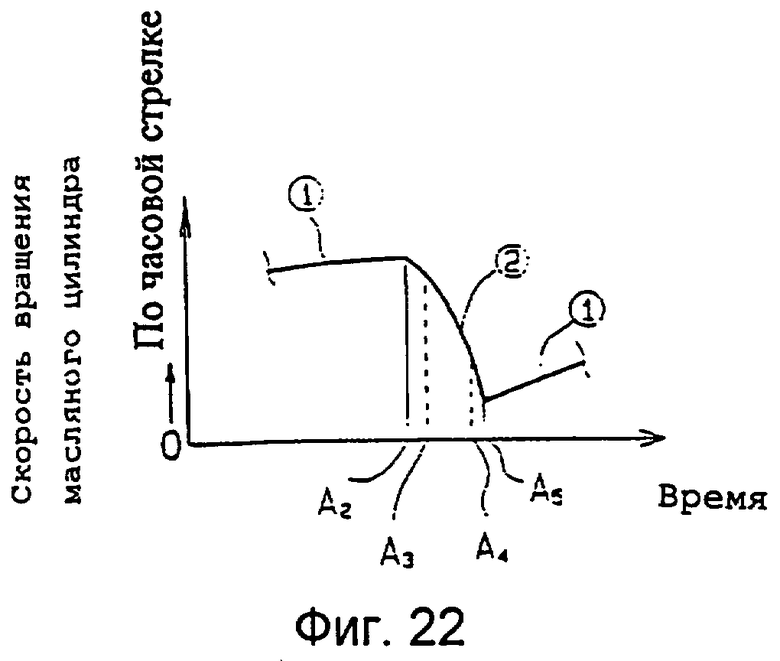
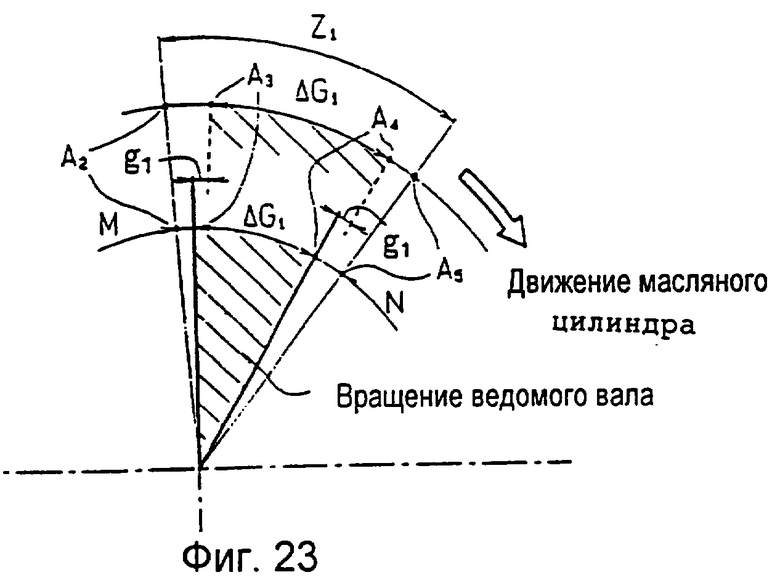
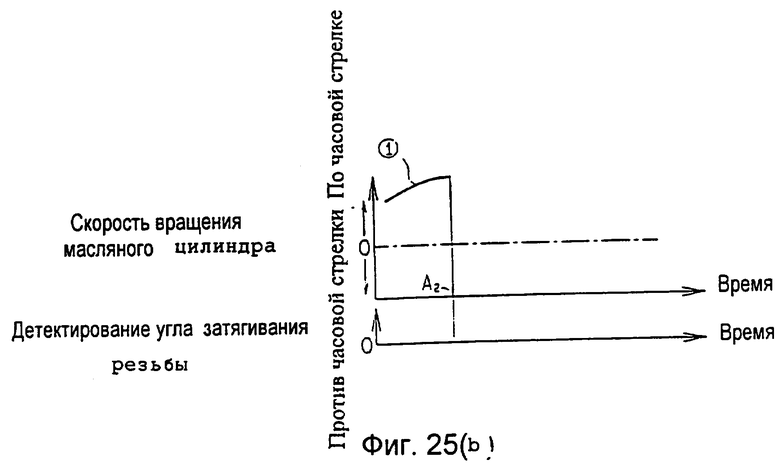
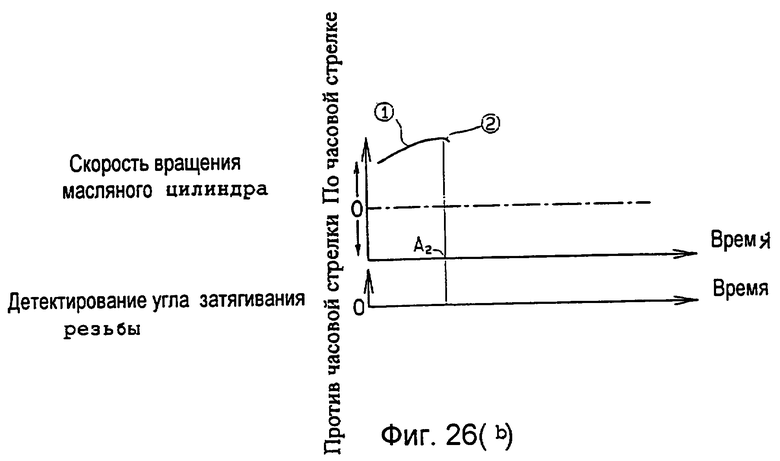
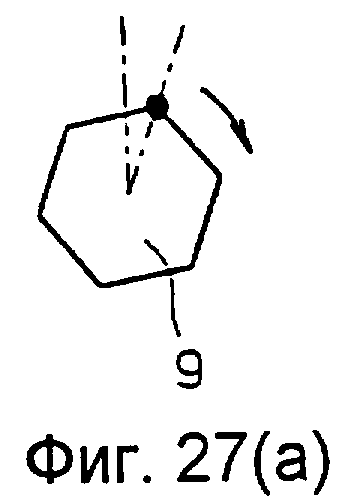
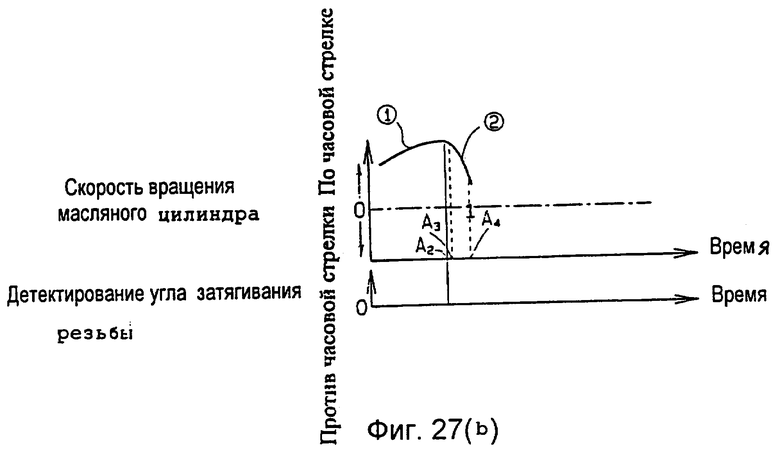
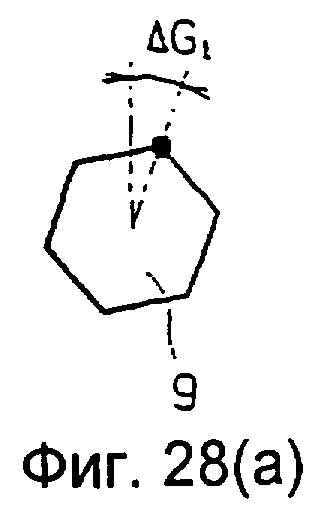
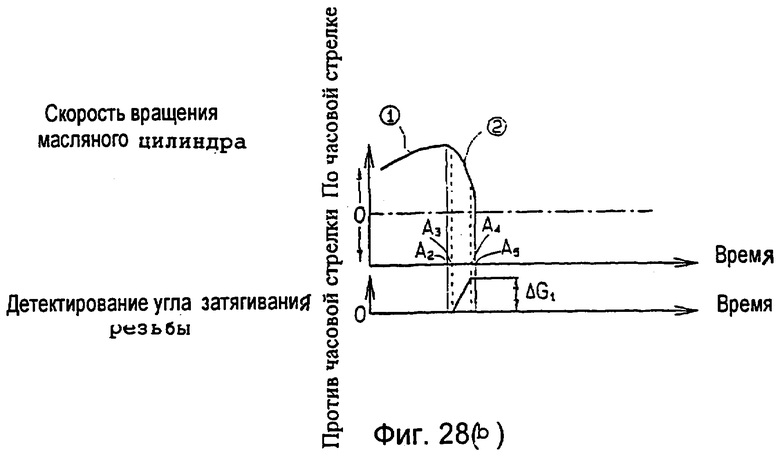
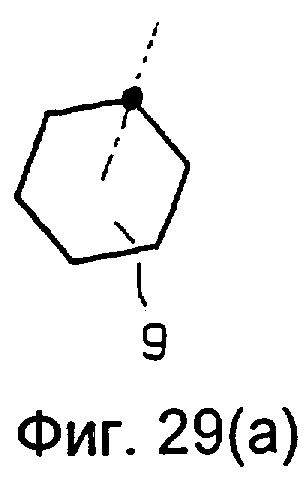
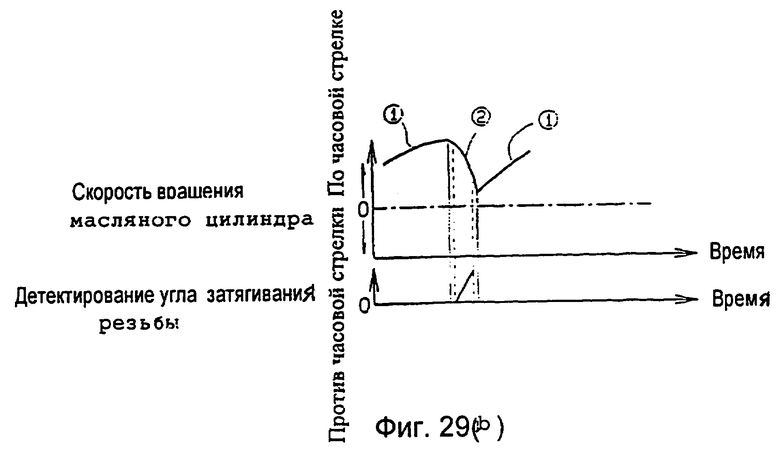
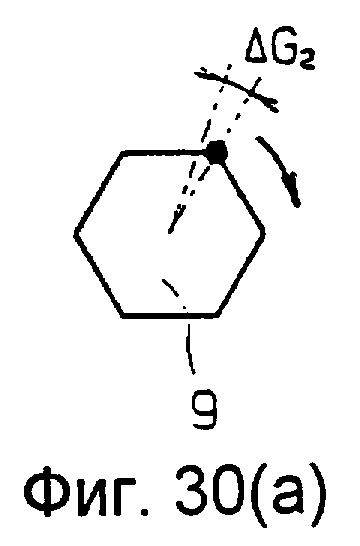
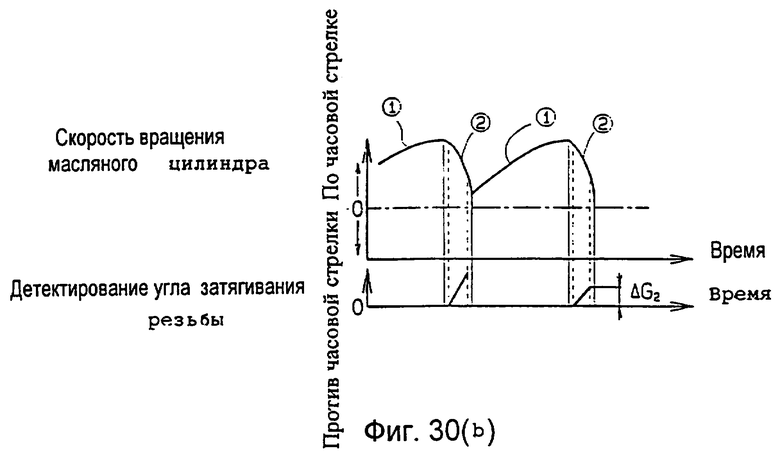
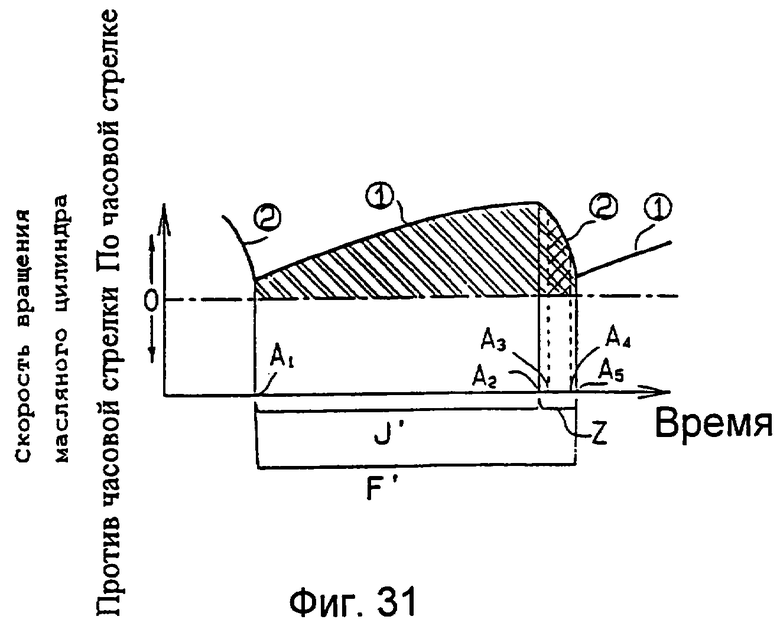
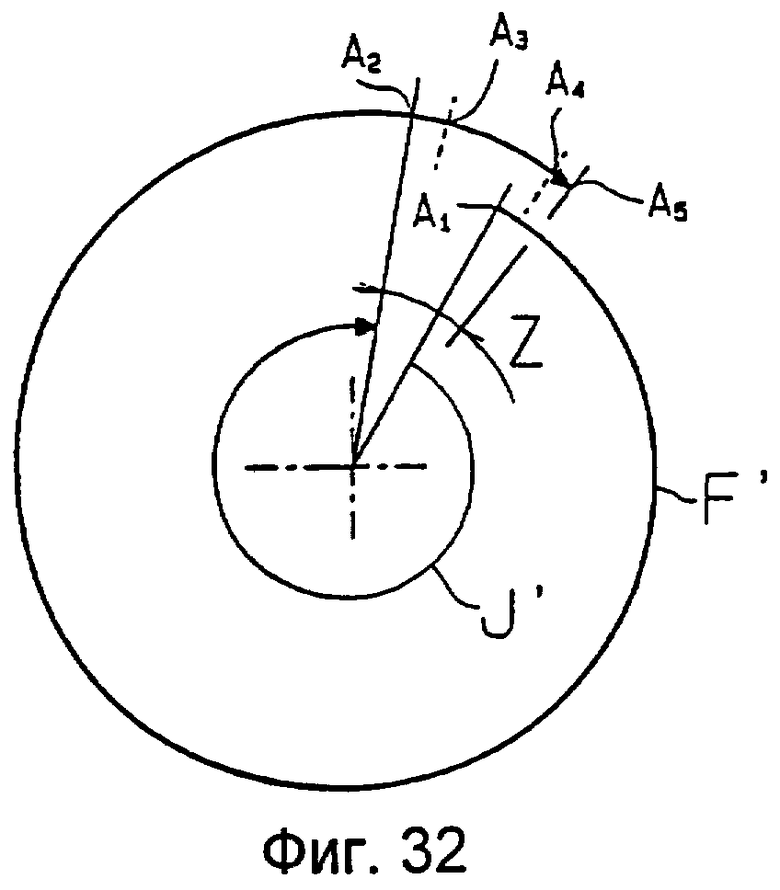
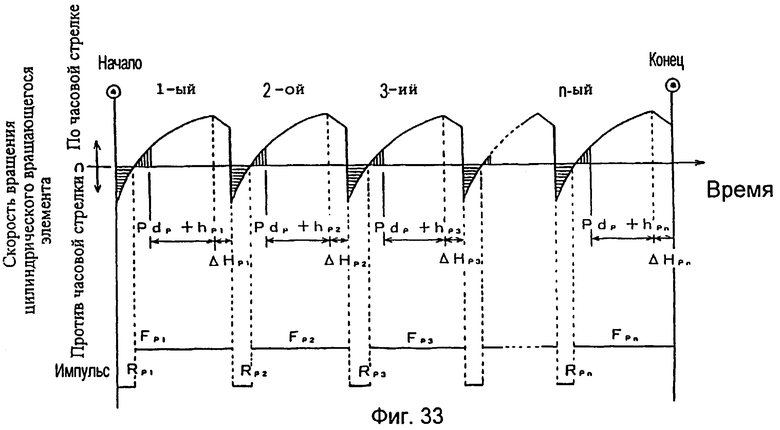
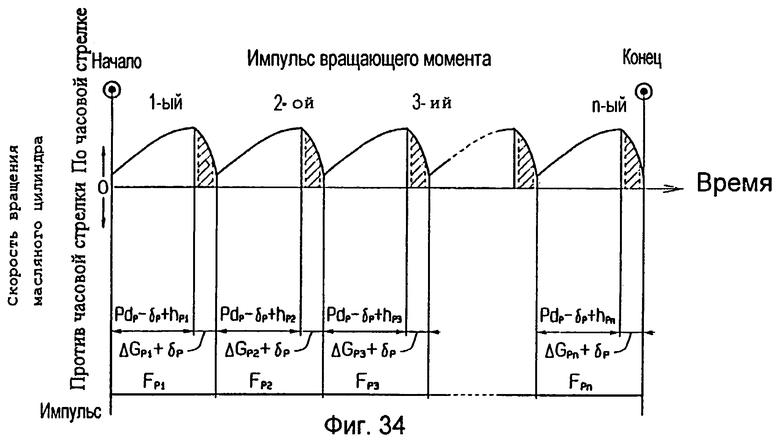
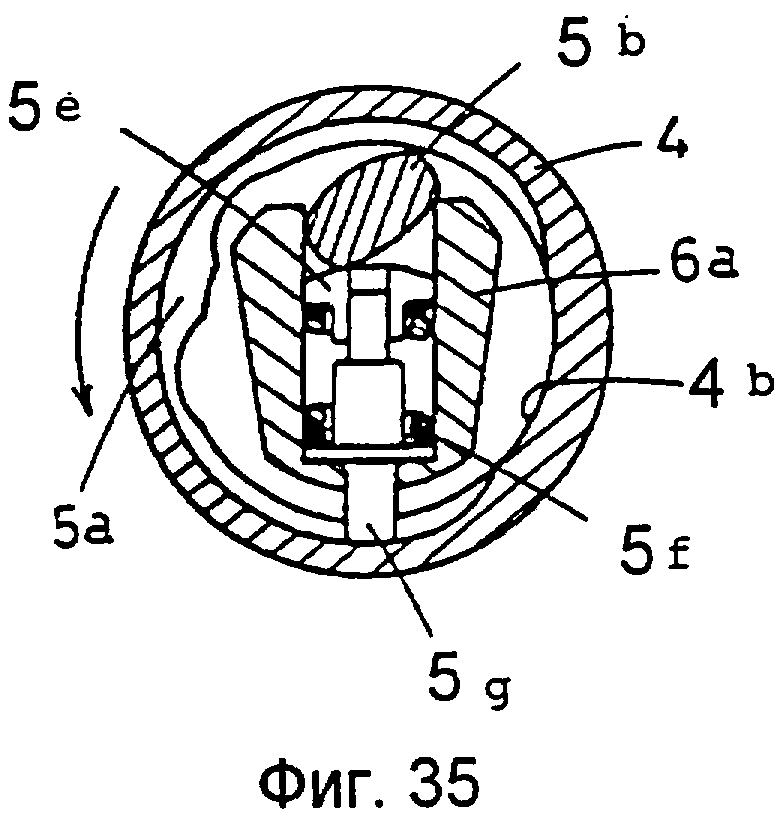
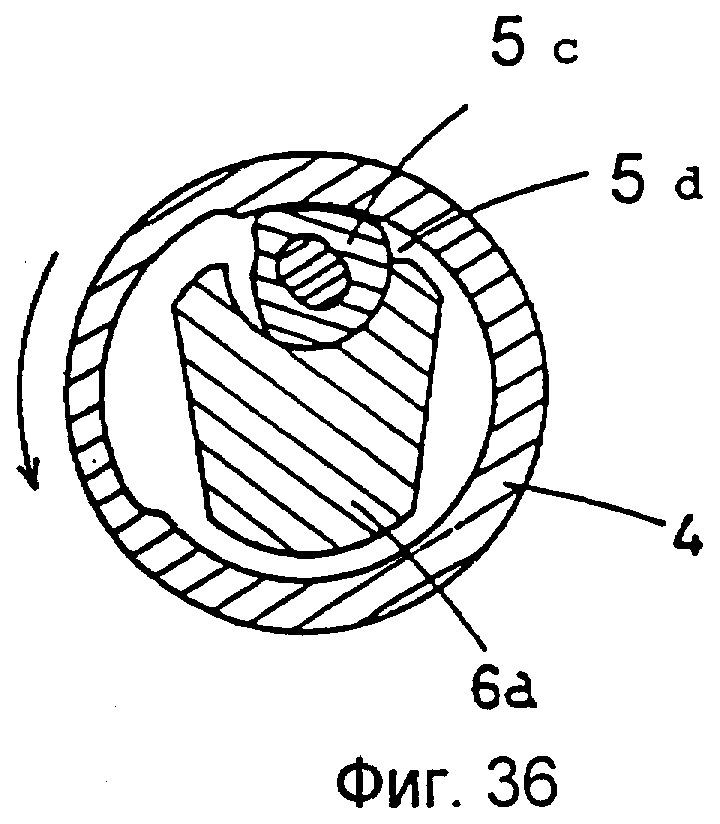
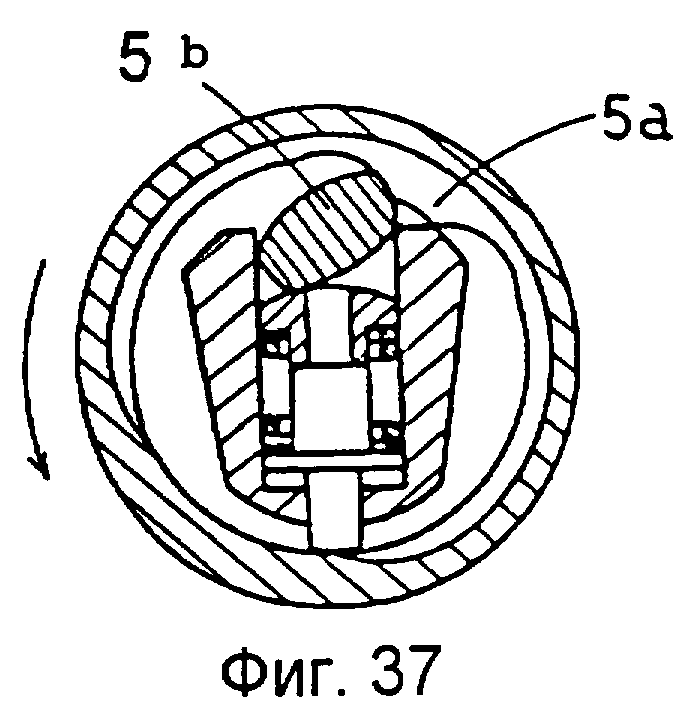
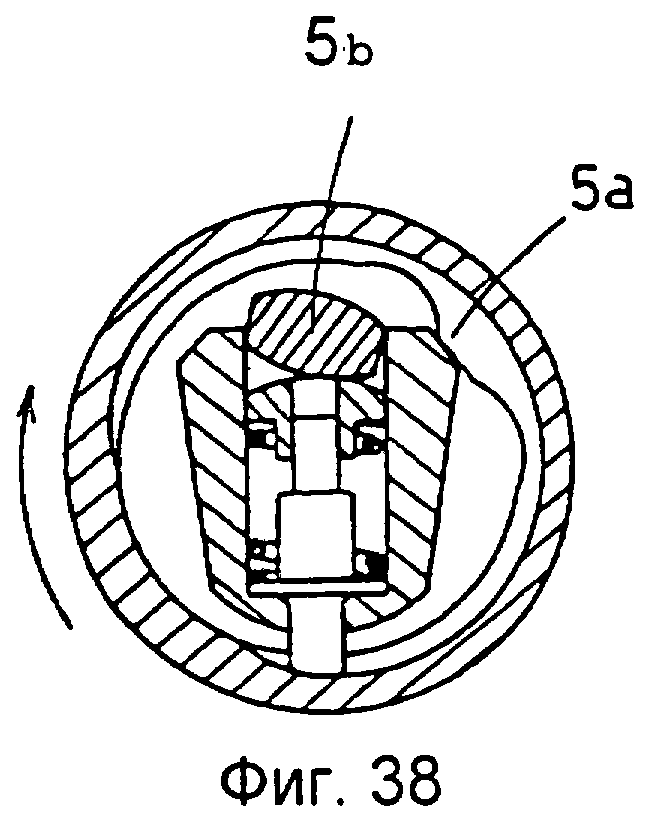
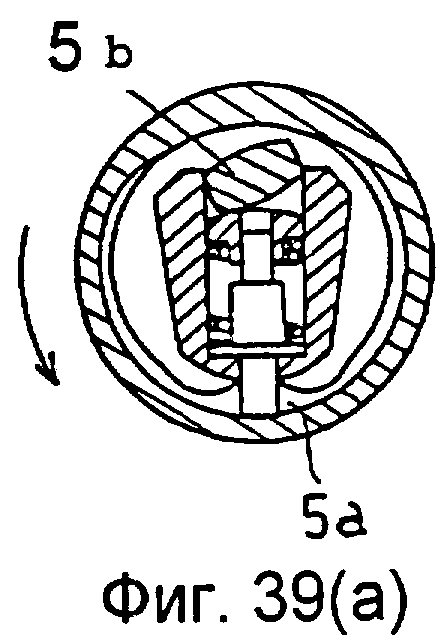
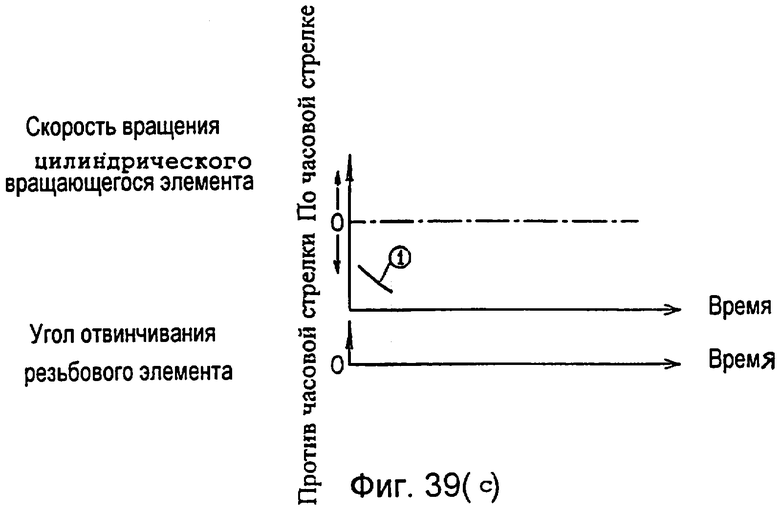
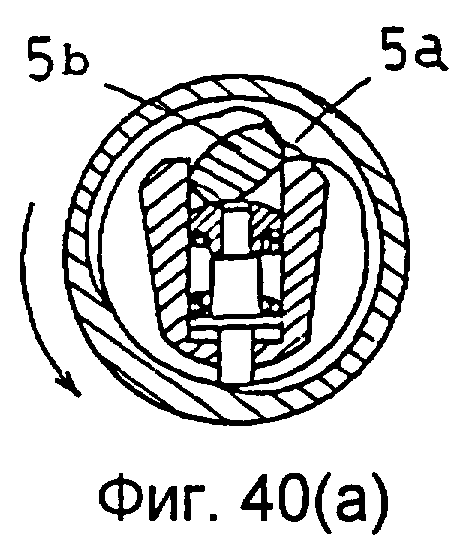
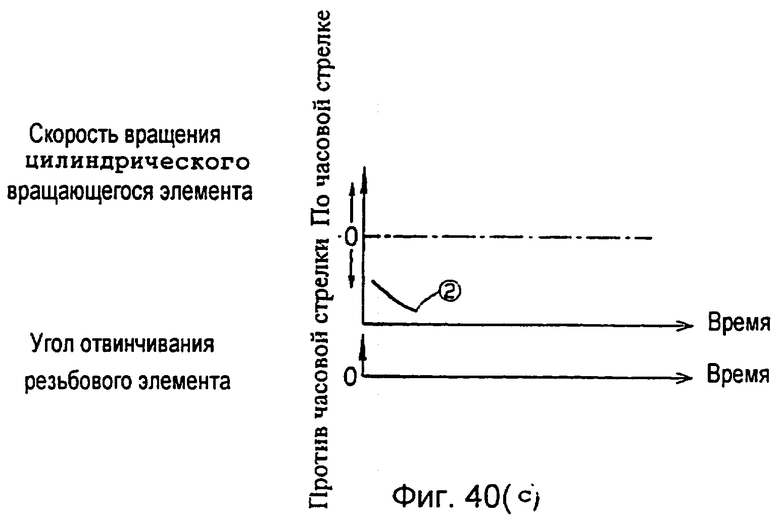
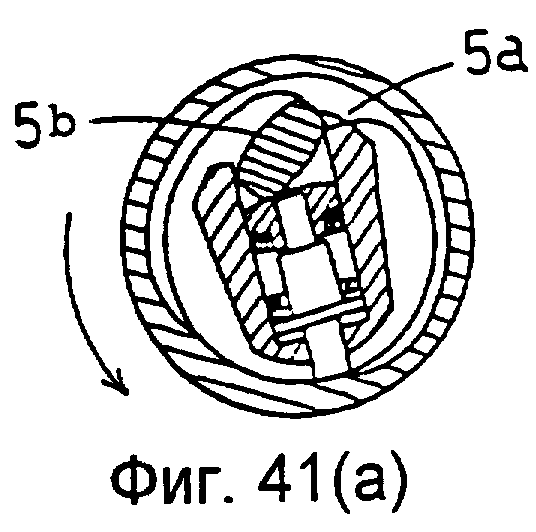
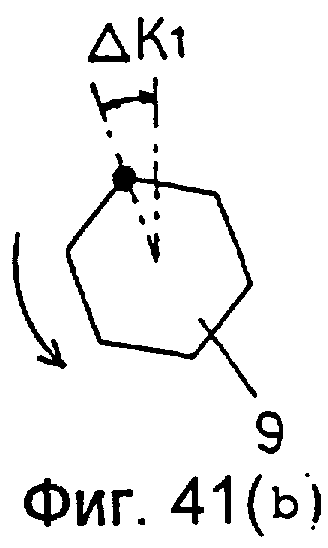
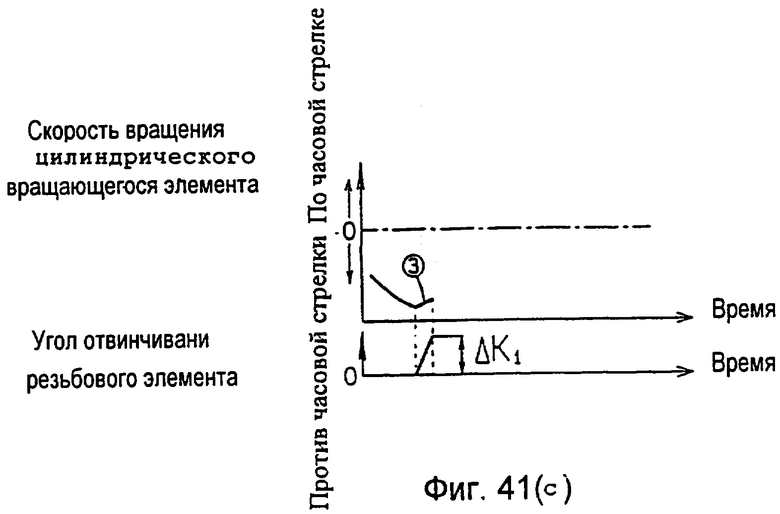
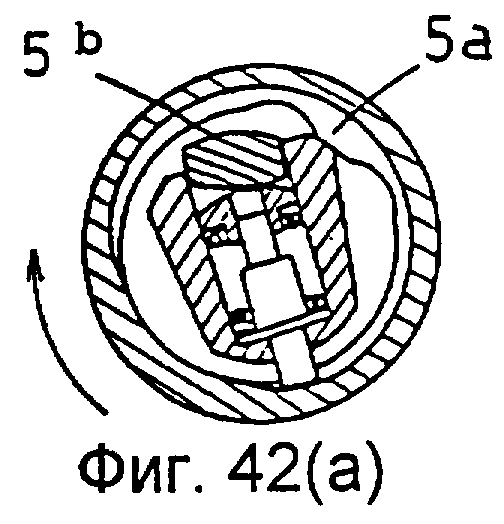
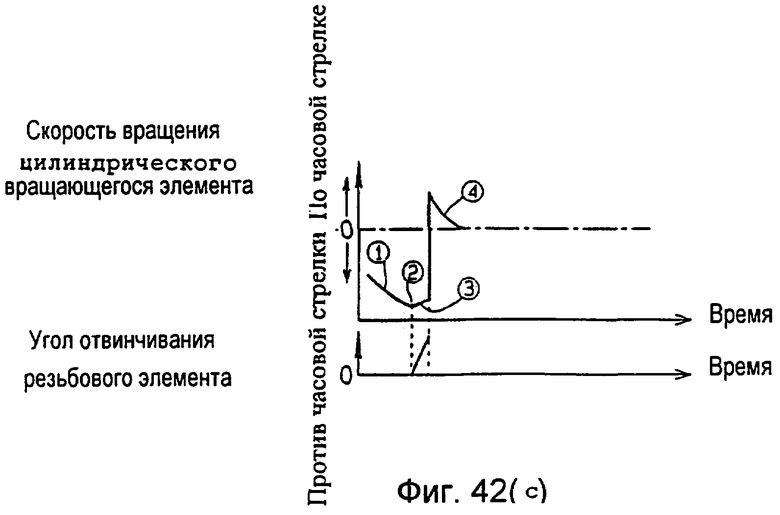
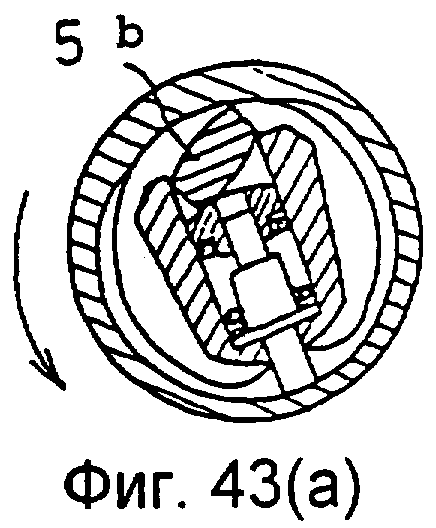
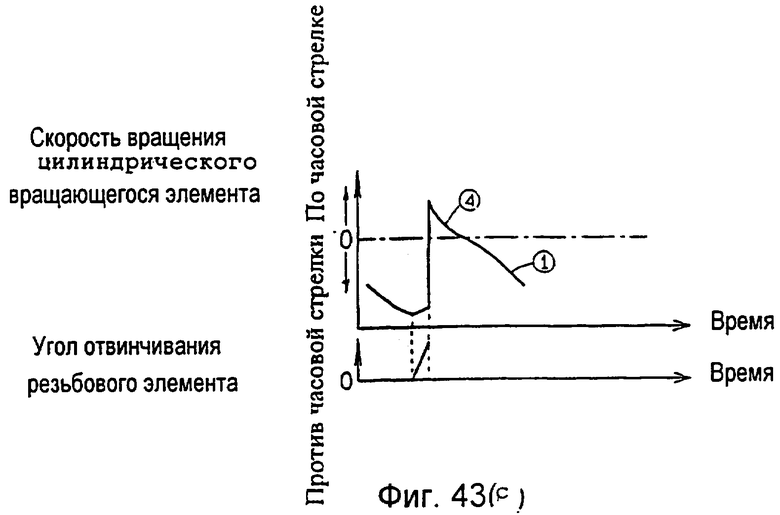
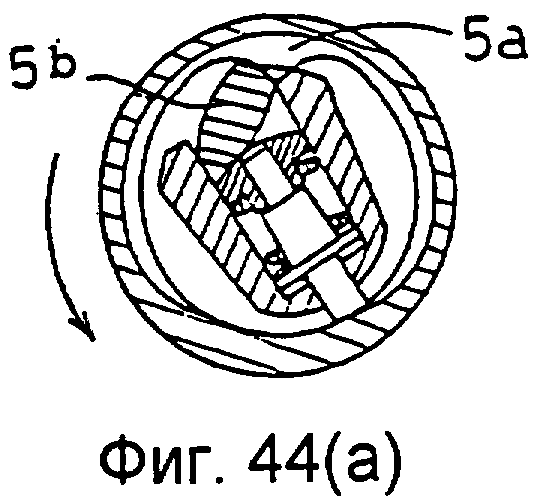
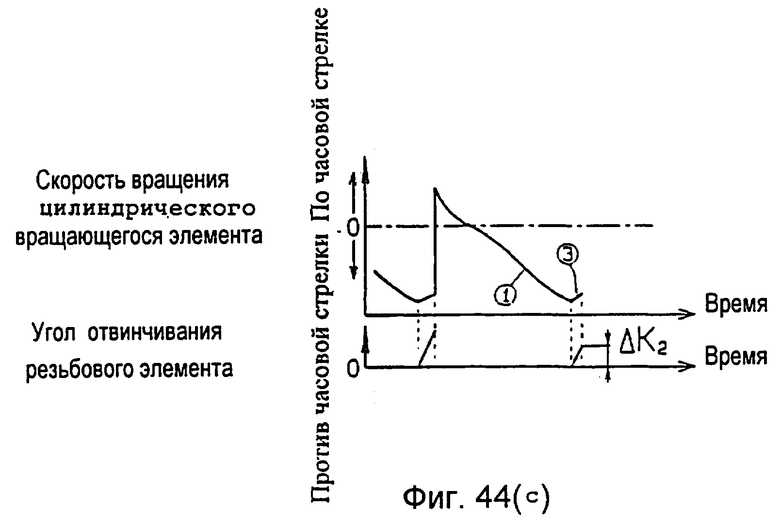
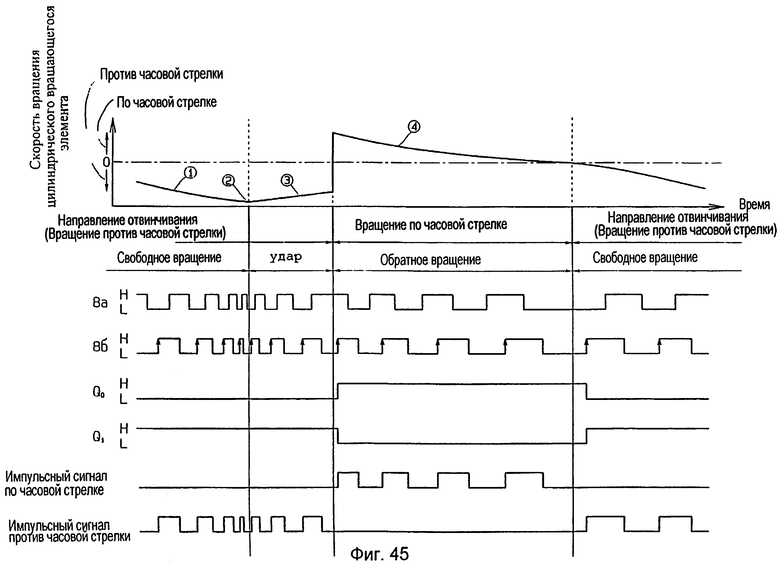
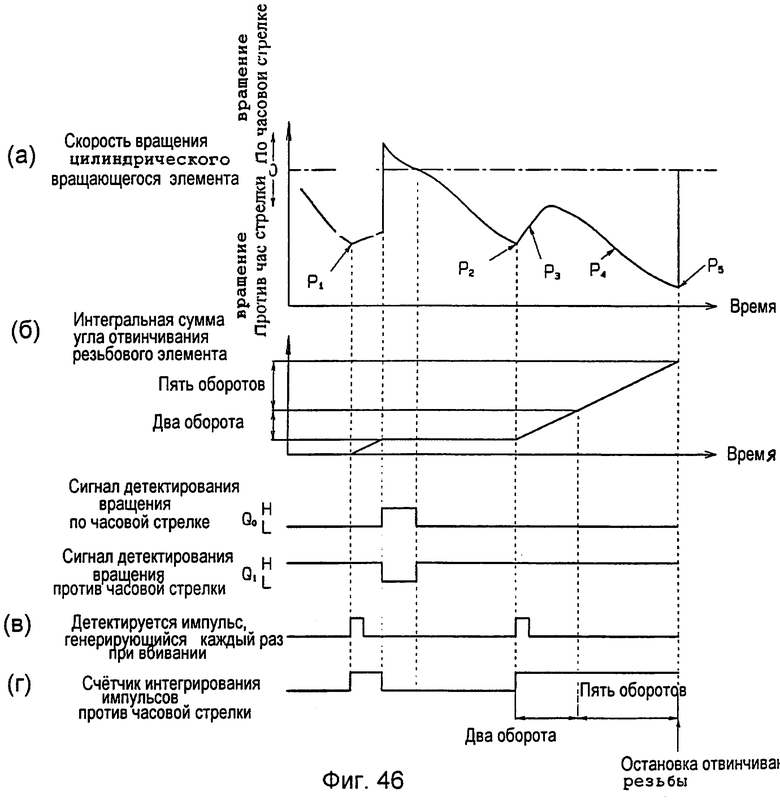
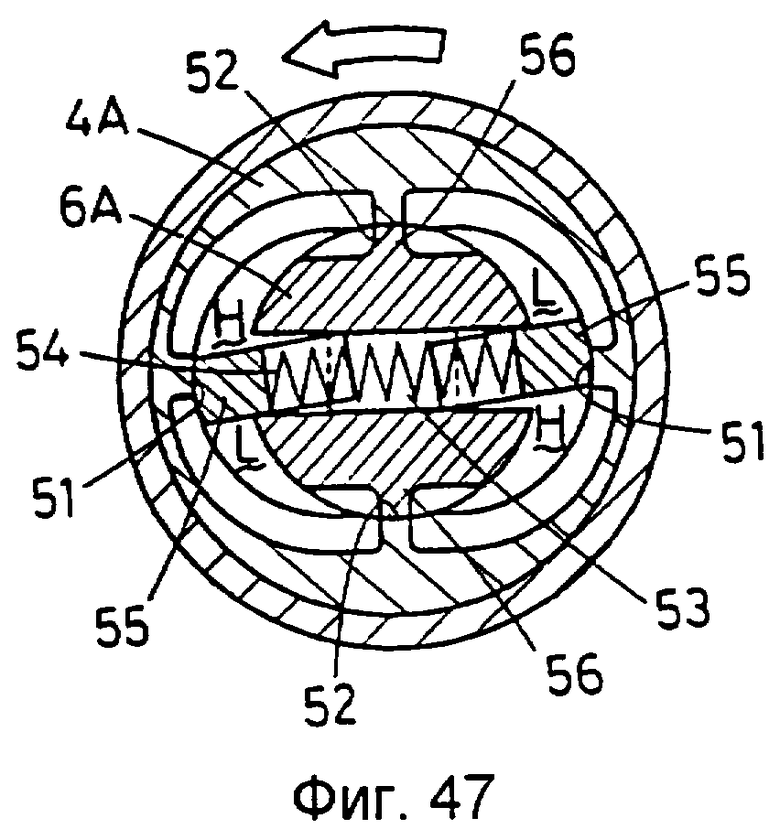
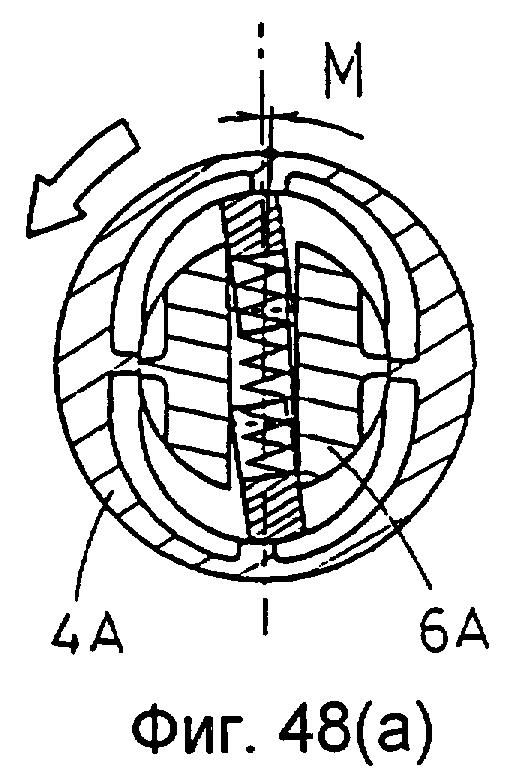
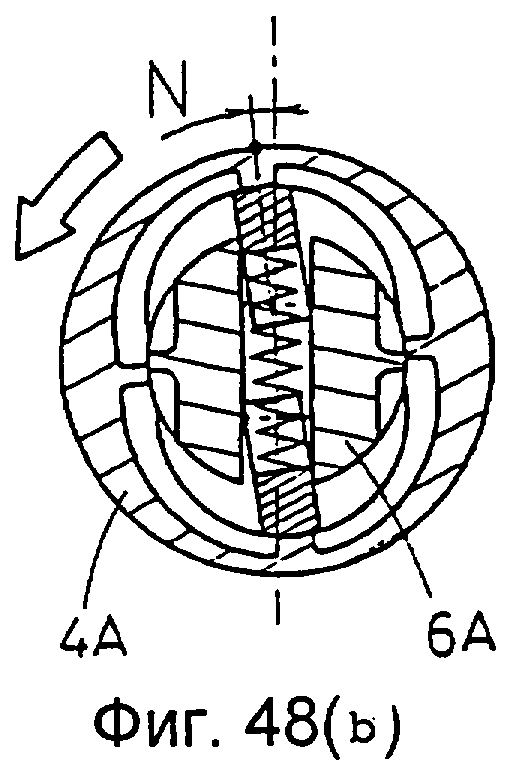
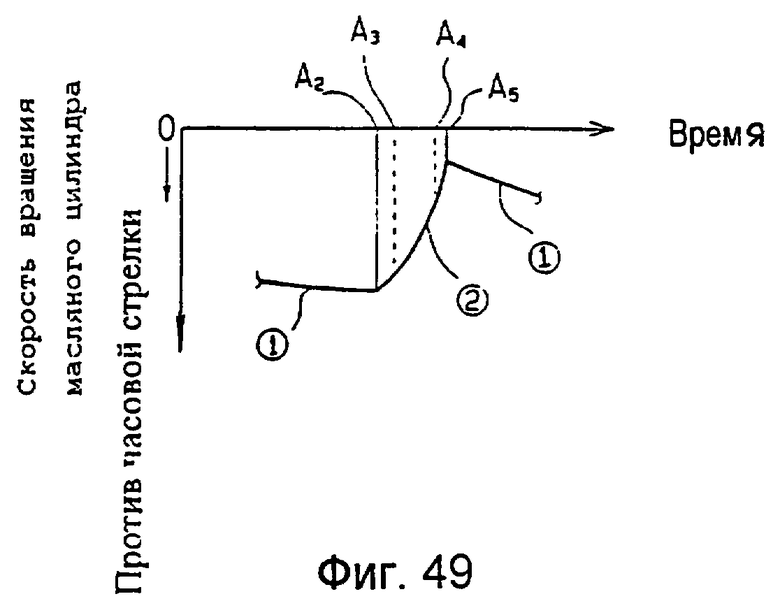
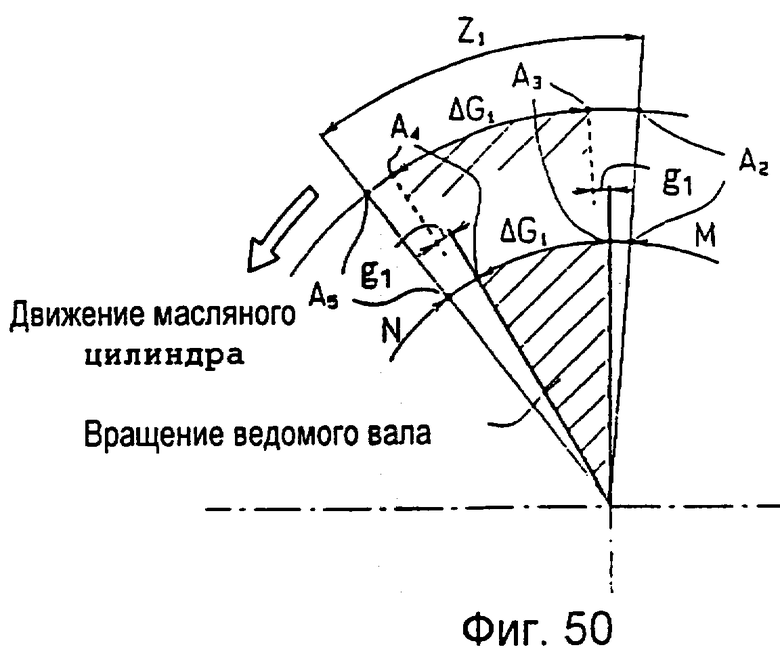
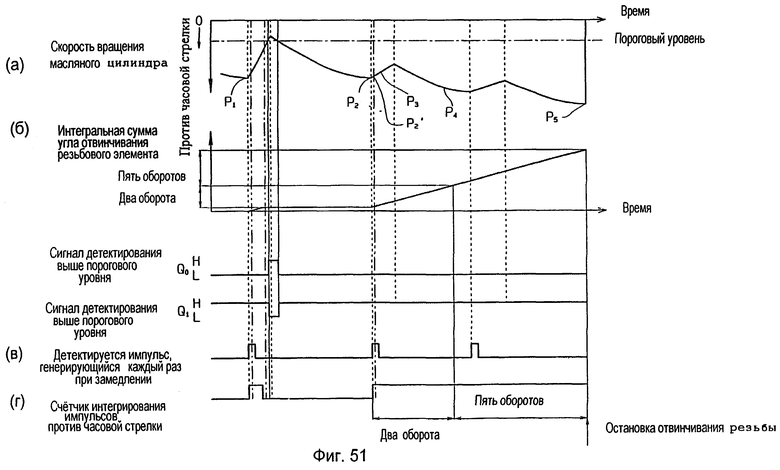
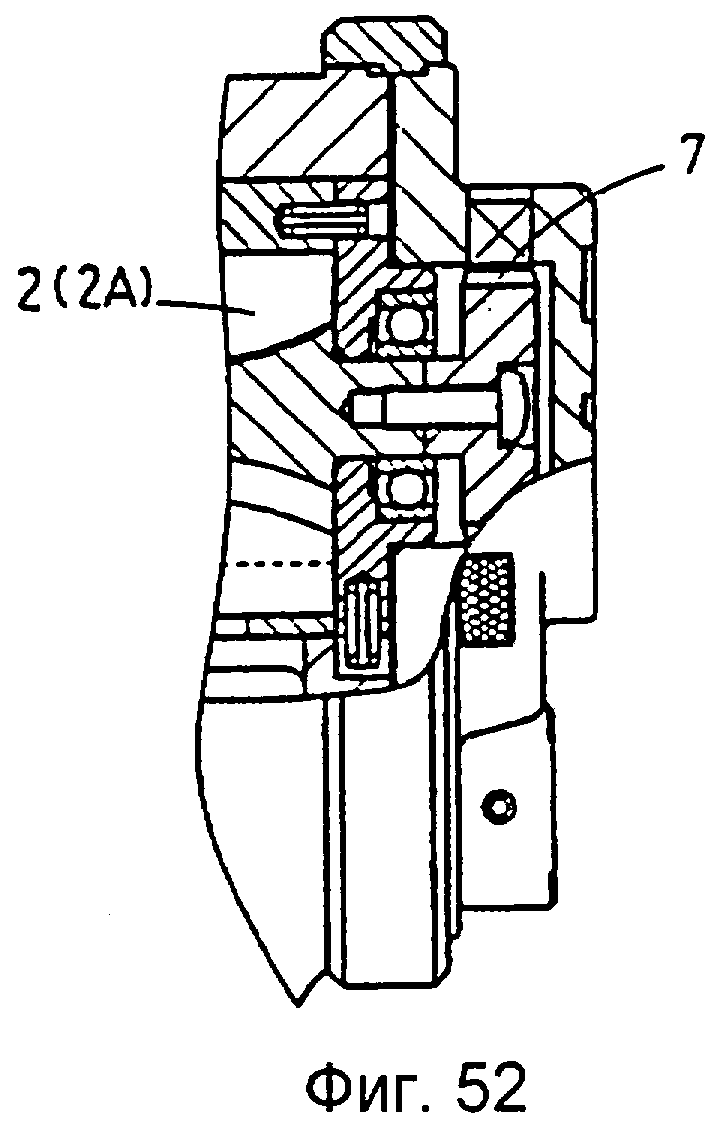
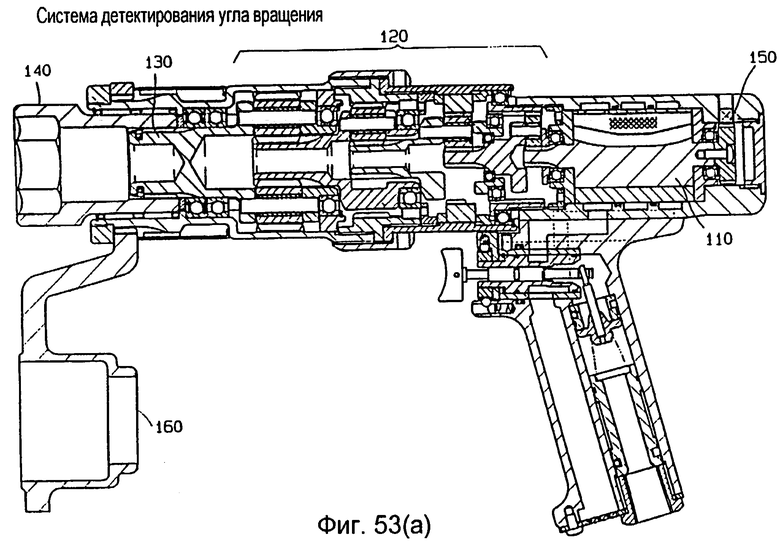
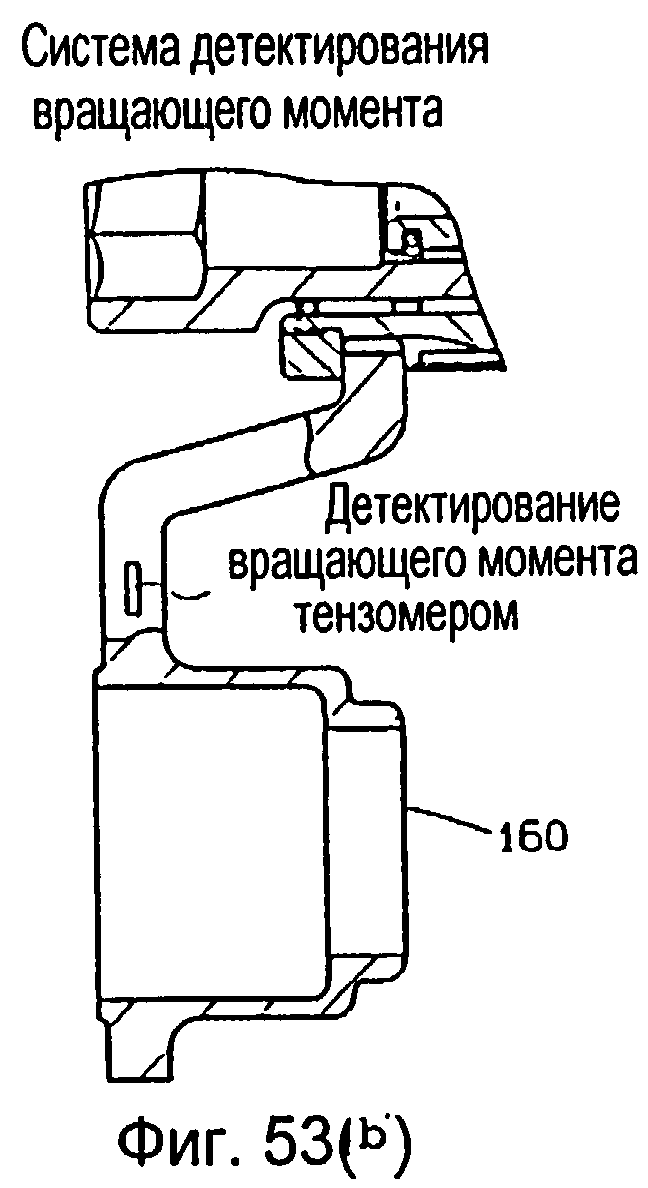
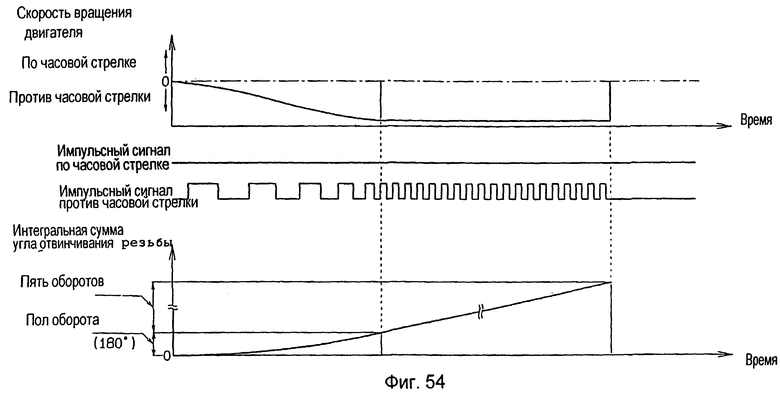
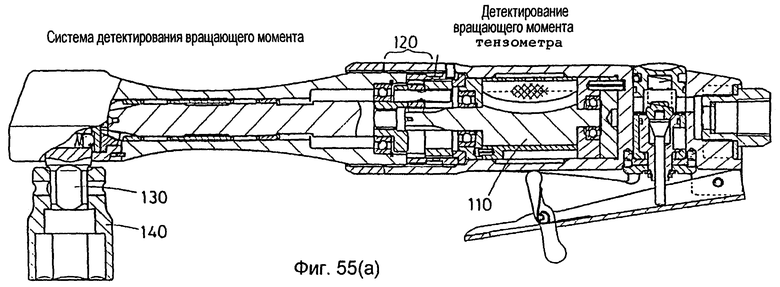
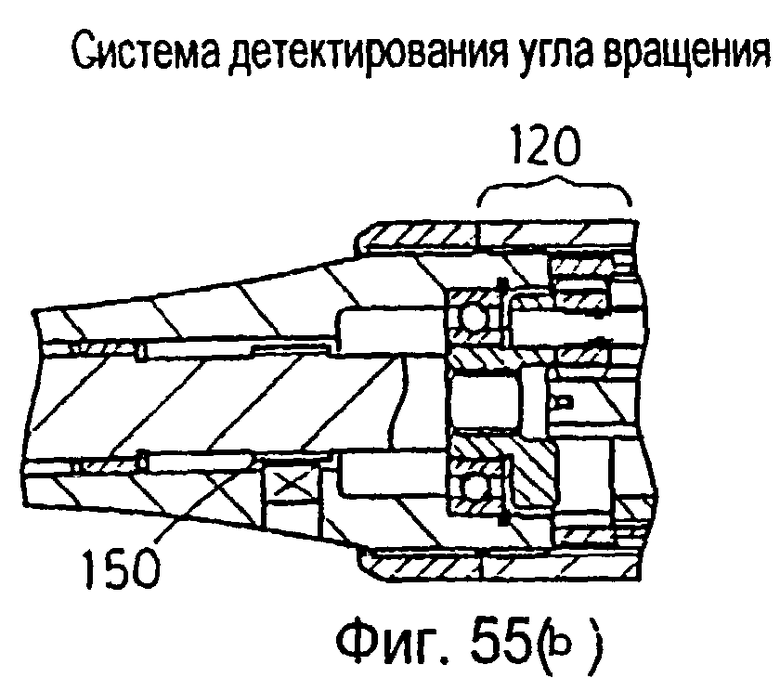
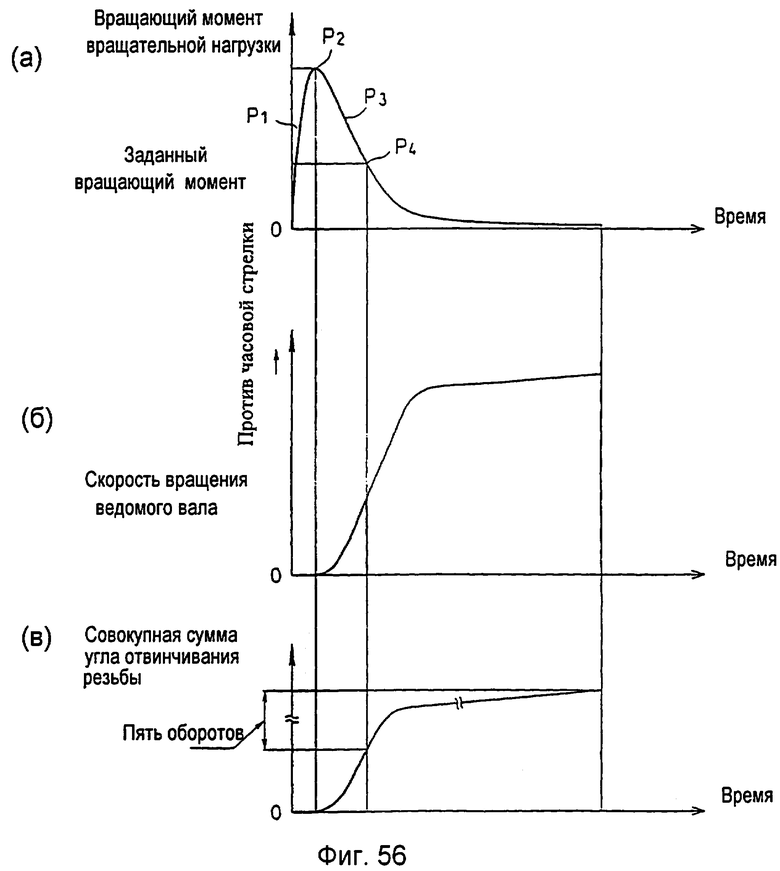
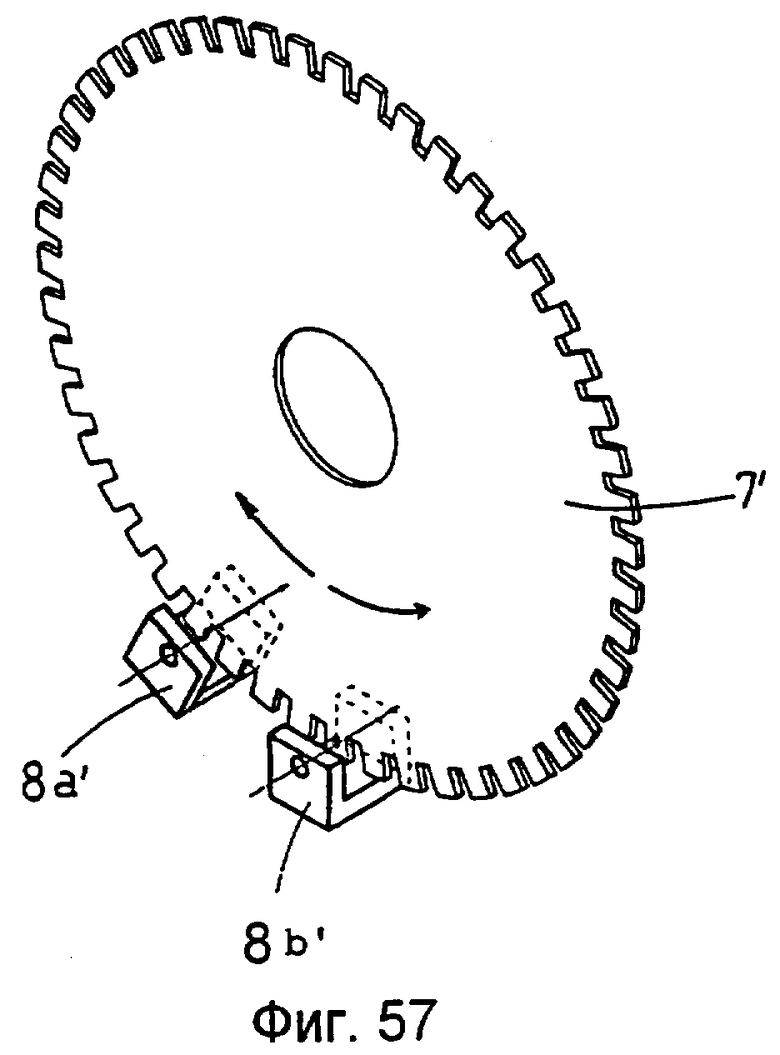
Группа изобретений относится к способам управления инструментами, предназначенными для обеспечения приложения вращающего момента к резьбовому элементу, такому как болт и гайка. Способы считывания угла вращения приводимого вручную инструмента позволяют при достижении заданного значения образованного угла прекращать затягивание резьбы. Способы детектирования биения при управляемом затягивании приводимого вручную инструмента позволяют определять биение, и таким образом, степень ошибки, вошедшей в результаты измерения, вызванной биением. Способ определения надежности затягивания осуществляется путем сравнения угла биения, вычисленного посредством одного из способов детектирования биения, с предварительно установленным допустимым углом. Способы управления приводимым вручную отвинчивающим инструментом позволяют прекращать отвинчивание, когда угол вращения достигнет определенной, заранее заданной величины. Все эти способы позволяют достичь большой точности работы инструмента. 8 с.п. ф-лы, 57 ил.
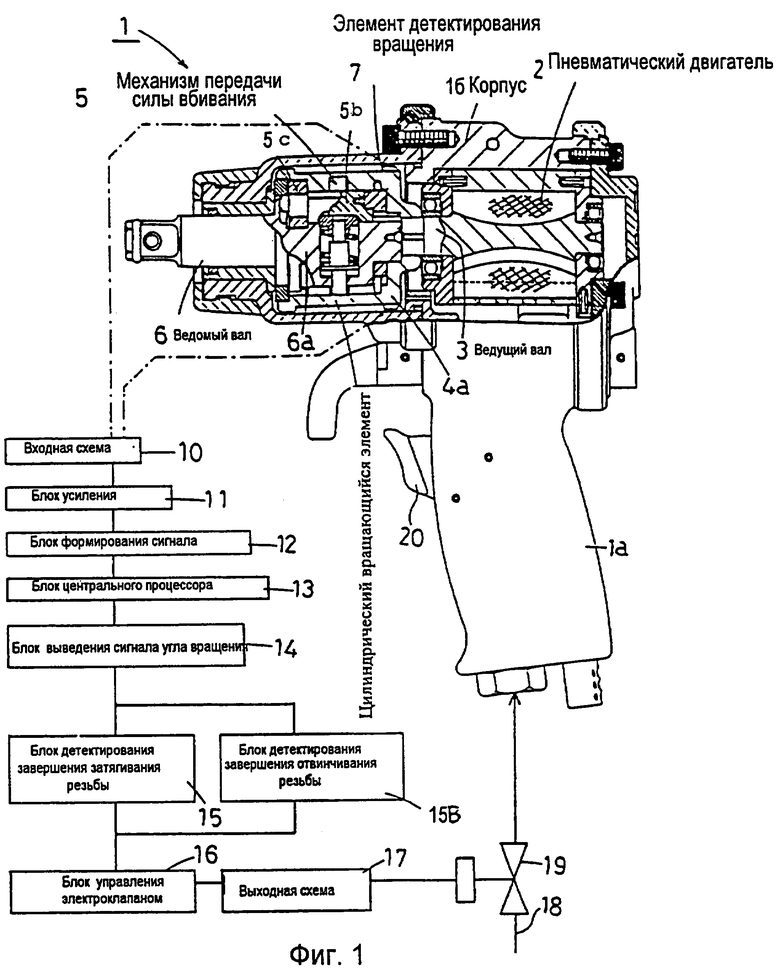
угол биения=Р - совокупный суммарный Pd - совокупный суммарный ΔН,
где Pd - запроектированное значение угла, соответствующее 360°/m для случая числа m ударов за один оборот вращающегося элемента.
угол биения=Р - совокупный суммарный Pd - совокупный суммарный AG,
где Pd - запроектированное значение угла, соответствующее 360°/m для случая числа m ударов за один оборот вращающегося элемента.
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| US 5615616 А, 01.04.1997 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

