Область техники, к которой относится изобретение.
Настоящее изобретение относится к области управления траекторией аэростата и, в частности, касается устройства, находящегося на некотором удалении от аэростата и предназначенного для создания требуемых усилий для управления траекторией.
Уровень техники.
Существует очень немного устройств, используемых для управления полетом свободных аэростатов, таких, например, как шары-зонды с научными приборами для изучения атмосферных явлений. Так, у дирижаблей, приводимых в движение воздушным винтом, траектория полета может управляться путем изменения скорости вращения и шага лопастей винта. Однако по максимальной высоте и полезной нагрузке дирижабли значительно уступают соответствующим неуправляемым аэростатам. Последние, снабженные приборами для научных исследований, обычно свободно дрейфуют под воздействием преобладающего ветра на заданной рабочей высоте. Во многих случаях запуск таких аэростатов должен откладываться до получения прогнозов о наличии благоприятного ветра, который может доставить аэростат в желаемый район или унесет его в сторону от запретной зоны. Нередко такие полеты аэростатов приходится прерывать из-за необходимости предотвратить их появление над определенными районами, обеспечить сброс груза на заданную площадку или избежать опасностей, связанных с полетом над густонаселенными районами. Указанные причины для такого прерывания полета могут быть устранены при наличии даже самой минимальной возможности управлять траекторией.
Известными способами управления траекторией аэростатов являются использование пропеллеров, изменение высоты полета для выбора нужного ветра и применение парашютов, крепящихся на длинных тросах.
Чтобы обеспечить передвижение аэростата в атмосфере, пропеллеры должны иметь значительную мощность. На больших высотах, обычно требующихся для аэростатов с научно-исследовательскими приборами, воздух обладает очень низкой плотностью. Для создания достаточной подъемной силы на таких высотах размеры пропеллеров должны быть очень большими. Кроме того, аэростатные системы обычно не располагают большой мощностью ввиду естественных ограничений на вес оборудования. Если источником энергии являются солнечные батареи, работа оборудования в ночное время становится невозможной без очень тяжелых батарей. Если же движущая сила обеспечивается сжиганием топлива, длительность ее действия ограничивается весом находящегося на борту топлива. Эти требования к силовой установке вступают в противоречие с требованием минимального веса.
Известно несколько исследований, посвященных концепциям винтовых летательных аппаратов легче, чем воздух (ЛЧВ) (LTA). Так, в докладе Ворачека "Сравнительный анализ нескольких концепций высотных аэростатных станций" (A Comparison of Several Very High Altitude Station Keeping Balloon Concepts", by J.J.Vorachek), представленном на 6-м симпозиуме AFCRL в 1970 году, и докладе Росса "Новейшие аэростатные системы в качестве фотографических платформ" ("Advanced Balloon Systems as Photographic Platforms", by R.R.Ross), представленном на симпозиуме по проблемам изучения Земли при помощи аэростатов ("Earth Observations From Balloons") в 1969 году, рассматриваются вопросы управления аэростатами естественной формы при помощи винтомоторных установок, которые подвешиваются на сравнительно коротких тросах. В обоих докладах речь идет о летных испытаниях аэростатов естественной формы, снабженных подвешенной к ним на тросах силовой установкой с пропеллером. В соответствии с этими докладами продолжительность работы указанных устройств ограничивается примерно двумя днями ввиду большого количества энергии, требуемой от двигательной установки. В указанных докладах также рассматриваются трудности, связанные с работой двигателей на больших высотах. Воздушно-реактивные двигатели нуждаются в многоступенчатой схеме нагнетания для повышения плотности воздуха до такой степени, чтобы он обеспечивал эффективное сгорание топлива. Кроме того, как у двигателей внутреннего сгорания, так и у электродвигателей возникают проблемы, связанные с отводом значительного количества тепла, чтобы не допустить перегрева оборудования в условиях разреженной атмосферы.
Другой тип винтомоторного аппарата ЛЧВ описывается в докладе "Анализ и конструкция высотного дирижабля" ("POBAL-S, The Analysis and Design of a High Altitude Airship"), подготовленном Дж.Бимером и другими авторами (Jack Beemer, et al.) от имени Кембриджской научно-исследовательской лаборатории военно-воздушных сил (Air Force Cambridge Research Laboratories) корпорации Raven Industries в 1975 году. Этот документ содержит описание винтомоторного дирижабля, предназначенного для работы на высоте до 21 км в течение примерно одной недели.
Как винтомоторный аэростат, так и винтомоторный дирижабль, описанные в вышеуказанных докладах, были предназначены для удержания аппарата ЛВЧ над определенной точкой земной поверхности. Для достижения этой цели летательный аппарат ЛВЧ должен обладать способностью развивать относительную скорость, равную скорости ветра на рабочей высоте. Поскольку скорость ветра может находиться в диапазоне 15-50 м/с (50-150 футов в секунду), силовая установка летательного аппарата должна иметь значительную мощность.
Альтернативный подход к решению проблемы заключается в управлении высотой полета для выхода на высоту, где ветер дует в нужном направлении (или, по крайней мере, в направлении, близком к желаемому). Это основной способ, который используется аэронавтами-спортсменами для управления траекторией воздушных шаров, наполненных нагретым воздухом или гелием. Способ выбора соответствующих высот для обеспечения дрейфа аэростатов в нужном направлении также имеет много недостатков. Во-первых, необходимо иметь на борту средство для управления высотой полета аэростата. Аэронавты, совершающие полеты в спортивных шарах с нагретым воздухом, должны повышать или снижать температуру воздуха в шаре соответственно для увеличения или уменьшения его высоты, а аэронавты на воздушных шарах, наполненных гелием, должны постоянно сбрасывать балласт или выпускать гелий в атмосферу.
Такое использование расходных материалов, в конечном счете, ограничивает продолжительность полета. Более того, наличие балласта на борту снижает полезную нагрузку летательного аппарата. Во-вторых, многие научно-исследовательские приборы, находящиеся на борту аэростата, особенно те, которые используются для астрономических и астрофизических экспериментов, предназначены для работы в самых верхних слоях атмосферы (при разреженности 99%) и не в состоянии обеспечить высокую точность показаний на низших высотах. Следует иметь в виду, что для выбора нужной высоты необходимо иметь точные данные о скорости и направлении ветра на разных высотах. Такие данные во время полета обычно отсутствуют. Поэтому поиски желаемой высоты в спортивной аэронавтике нередко сопряжены с экспериментированием и использованием метода проб и ошибок.
Известен способ управления высотой полета без сбрасывания балласта при помощи двух шаров, один из которых наполняется гелием, а другой гораздо более плотным хладагентом. На низких высотах хладагент находится в газообразном состоянии, а на больших высотах конденсируется и превращается в жидкость. Таким образом, общая подъемная сила системы на высоте, превышающей определенный предел, уменьшается из-за уменьшения вытесненного объема воздуха на величину объема газа, который превращается в конденсат. При снижении системы и повышении температуры окружающего воздуха жидкость опять начинает испаряться, увеличиваясь в объеме и вытесняя большое количество воздуха. В результате подъемная сила системы начинает превышать ее вес, и она снова набирает высоту. Таким образом, указанная система самостоятельно поднимается и опускается в пределах большого диапазона высот без выпуска гелия или сбрасывания балласта. Данный способ был описан в докладе Нока, Аарона и других авторов "Опыт управления высотой полета аэростата", который был представлен в 1995 году ("Balloon Altitude Control Experiment (ALICE)", by K.T.Nock, K.M.Aaron, et al. 11th AIAA Lighter-than-Air Systems Technology Conference, 1995). Действительно, помещая жидкий холодильный агент в сосуд высокого давления, сообщающийся с герметизированной оболочкой аэростата, можно обеспечить определенную степень контроля за высотой полета. Временной цикл перехода на желаемую высоту при таком управлении составляет несколько часов. Указанная схема не работает в стратосфере, а в тропосфере ее эффективность зависит от соответствующих изменений температур и давлений.
Специалистам известны также тормозные устройства, такие как парашют, которые могут раскрываться в более низких слоях атмосферы на значительном удалении от аэростата, где ветры обычно дуют в другом направлении. Данный способ изложен в докладе "Уникальный подход к проблеме управления аэростатом", сделанным Бурке в 1969 году (Raytheon report R69-4041A, "Unique Approach to Balloon Station Keeping", by E.R.Bourke II, 1969). Этот способ может использоваться для создания силы, которая заставляла бы аэростат двигаться относительно массы окружающего воздуха. Однако направление действия такой силы существенно ограничивается направлением ветра, дующего на высоте нахождения парашюта. Правда, при подъеме или снижении парашюта до высот, где ветры имеют другое направление, можно использовать лебедку, однако этот способ может быть связан с большой потерей времени для изменения направления силы ветра. Кроме того, при подъеме парашюта может потребоваться значительное количество энергии для преодоления как силы тяжести парашюта, так и его аэродинамического сопротивления, а также подробная информация о направлении ветра на разных высотах.
Краткое описание сущности изобретения.
В основу настоящего изобретения положена задача разработки эффективного средства для создания силы, позволяющей осуществлять управление траекторией аэростата. Такое средство должно быть предпочтительно ориентировано таким образом, чтобы создаваемая им подъемная сила действовала главным образом в горизонтальном направлении, пересекающем линию движения аэростата.
Другой задачей, решаемой настоящим изобретением, является разработка устройства управления аэростатом, которое бы обеспечило пассивное использование естественного ветра, удержание аэростата на заданной высоте и отвод от него ветром загрязняющих веществ.
Следующей задачей, решаемой настоящим изобретением, является разработка устройства, которое нуждалось бы в малом количестве энергии и могло бы эффективно работать в ночных условиях.
Эти и другие задачи, решаемые настоящим изобретением, достигаются посредством системы, которая содержит устройство для создания подъемной силы, действующей преимущественно в горизонтальном направлении, и подвешивается на тросе к аэростату или другому летательному аппарату ЛВЧ. Указанная система может также содержать закрылок или руль для изменения направления подъемной силы, создаваемой вышеупомянутым устройством. Устройство для создания подъемной силы и закрылок (или руль направления) могут устанавливаться на раме типа балки или крепиться к основной конструкции непосредственно.
В одном из вариантов осуществления настоящего изобретения устройство для создания подъемной силы представляет собой парус. В другом варианте для создания подъемной силы используется крыло. В третьем варианте устройство для создания подъемной силы содержит элемент вертушки.
Закрылок может менять направление подъемной силы, создаваемой вышеупомянутым устройством, путем изменения его ориентации или движения. Целесообразно применять трос большой длины, позволяющей использовать естественную разницу в направленности ветров на разных высотах.
Предложенное устройство требует минимальной затраты энергии, способно работать в ночных условиях, может изготавливаться из очень легких материалов, не нуждается в подробной информации о ветровом поле, позволяет аэростату оставаться на заданной высоте и создает управляющие силы в более широком диапазоне величин и направлений, чем тормозной парашют сопоставимых размеров. Кроме того, оно способно достаточно быстро менять направление управляющей силы и работает на меньшей, чем аэростат, высоте в более плотных слоях атмосферы, благодаря чему его размер может быть относительно малым по сравнению с размером аэростата.
Другое преимущество настоящего изобретения связано с аппаратурой аэростата для научных исследований. Некоторые очень чувствительные научные приборы определяют наличие примесей в атмосфере при очень низких концентрациях порядка нескольких частей на миллиард. Атмосферные загрязнители от самого аэростата, такие как газообразный гелий или летучие вещества, выделяемые материалом оболочки аэростата, могут искажать показания таких приборов. Обычный аэростат дрейфует вместе с окружающей его массой воздуха и вышеуказанные загрязняющие вещества накапливаются в непосредственной близости от аэростата и гондолы. Поэтому даже сравнительно слабый воздушный поток, создаваемый устройством управления траекторией аэростата, способствует отводу в сторону вышеупомянутых загрязняющих веществ и подводу свежего воздуха к научным приборам. Скорость и направление ветра в большой мере зависят от высоты. Расположение устройства управления траекторией на значительном расстоянии от аэростата (порядка нескольких километров ниже его) гарантирует существенную разницу ветров в районах местонахождения аэростата и устройства, управляющего траекторией. Направленность ветра не имеет очень большого значения, поскольку путем изменения угла атаки крыла можно менять величину и направление подъемной силы в довольно больших пределах, примерно таким же образом, как это делается при обеспечении движения парусного судна в различных направлениях под действием одного и того же ветра.
Поставленная задача решается тем, что в устройстве управления траекторией летательного аппарата легче, чем воздух (ЛЧВ), согласно изобретению трос имеет увеличивающуюся длину, достаточную для пассивного управления траекторией летательного аппарата ЛЧВ, основанного на естественной разнице воздушных потоков между летательным аппаратом ЛЧВ и устройством для создания подъемной силы.
Желательно, чтобы устройство, создающее подъемную силу, содержало парус.
Желательно, чтобы устройство, создающее подъемную силу, содержало крыло.
Желательно, чтобы устройство, создающее подъемную силу, содержало корпус вертушки. Желательно, чтобы трос содержал кабель.
Желательно, чтобы рама содержала балку, которая соединяет устройство для создания подъемной силы и закрылок, и дополнительно содержало противовес, установленный на балке, причем противовес был бы установлен с возможностью регулировки центра масс устройства для управления траекторией, и дополнительно содержало бы: приводной механизм, соединенный с закрылком для регулировки относительной ориентации закрылка, и систему управления приводным механизмом.
Поставленная задача решаются тем, что согласно изобретению трос выполнен с возможностью увеличения длины до достаточной для пассивного управления траектории летательного аппараты ЛЧВ, основанного на естественной разнице воздушных потоков между летательным аппаратом ЛЧВ и устройством для создания подъемной силы.
Желательно, чтобы устройство для создания подъемной силы содержало корпус вертушки. Желательно, чтобы трос содержал кабель.
Желательно, чтобы устройство содержало: приводной механизм, соединенный с закрылком для регулировки относительной ориентации закрылка, и систему управления приводным механизмом.
Поставленная задача решается тем, что согласно изобретению соединяющее средство растягивается до длины, достаточной для осуществления пассивного управления траектории летательного аппараты ЛЧВ, основанного на естественной разнице воздушных потоков между летательным аппаратом ЛЧВ и средством для создания подъемной силы.
Желательно, чтобы средство для создания подъемной силы содержало средство для управления подъемной силой, вырабатываемой этим средством.
Поставленные задачи решаются тем, что относительная ориентация закрылка управляет подъемной силой, воздействующей на летательный аппарат ЛЧВ, которая создается от естественной разницы воздушных потоков между летательным аппаратом ЛЧВ и устройством для создания подъемной силы, и регулирует относительную ориентацию закрылка, при этом длину трос увеличивают до длины, достаточно большой для пассивного управления траектории летательного аппарата ЛЧВ.
Желательно, чтобы устройство для создания подъемной силы содержало парус.
Желательно, чтобы устройство для создания подъемной силы содержит крыло.
Желательно, чтобы устройство для создания подъемной силы содержало корпус вертушки.
Поставленная задача решается тем, что согласно изобретению трос выполнен с возможностью увеличения длины до достаточной для пассивного управления траектории летательного аппараты ЛЧВ, основанного на естественной разнице воздушных потоков между устройством для создания подъемной силы и летательным аппаратом ЛЧВ.
Желательно, чтобы устройство для создания подъемной силы содержало корпус вертушки.
Желательно, чтобы трос включал кабель.
Поставленная задача решается тем, что согласно изобретению длину трос увеличивают до длины, достаточной для пассивного управления траекторией летательного аппарата ЛЧВ, основанного на естественной разнице воздушных потоков между летательным аппаратом ЛЧВ и устройством для создания подъемной силы.
Желательно, чтобы устройство для создания подъемной силы содержало парус.
Желательно, чтобы устройство для создания подъемной силы содержало крыло.
Желательно, чтобы устройство для создания подъемной силы содержало корпус вертушки.
Существо и другие преимущества настоящего изобретения будут более подробно рассмотрены на конкретных примерах, иллюстрирующих варианты его осуществления.
Краткое описание чертежей
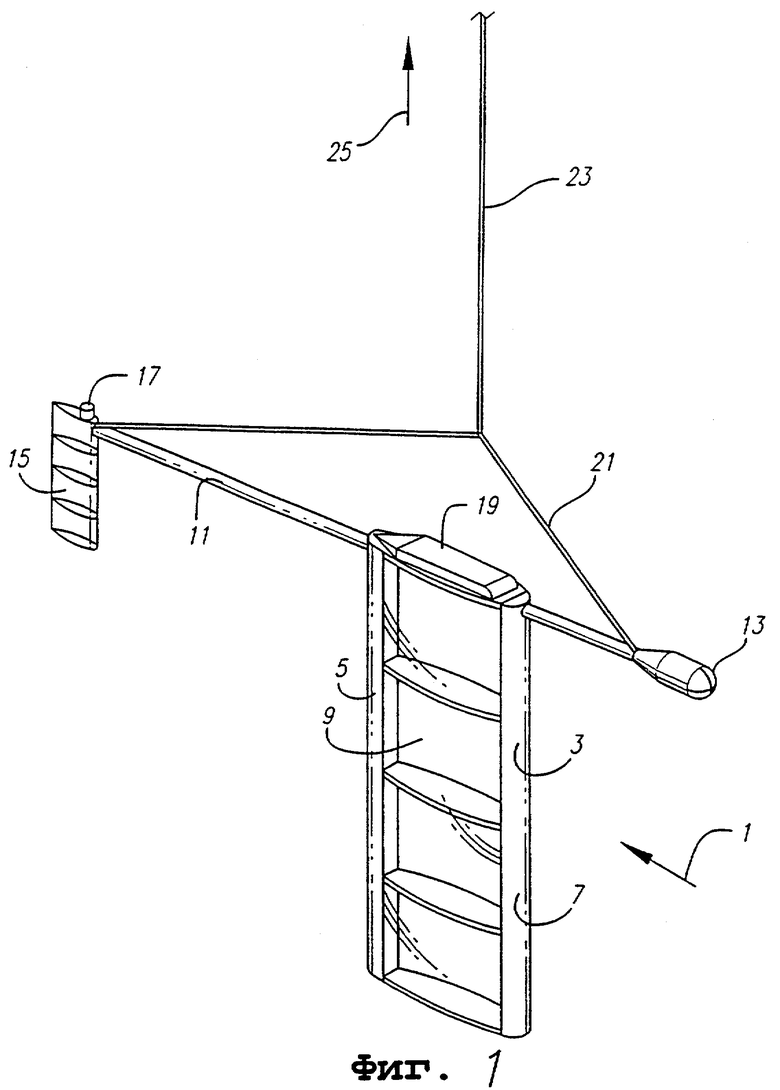
На фиг.1 представлен первый вариант устройства управления траекторией.
На фиг.2 представлен второй вариант устройства управления траекторией с использованием обратного паруса.
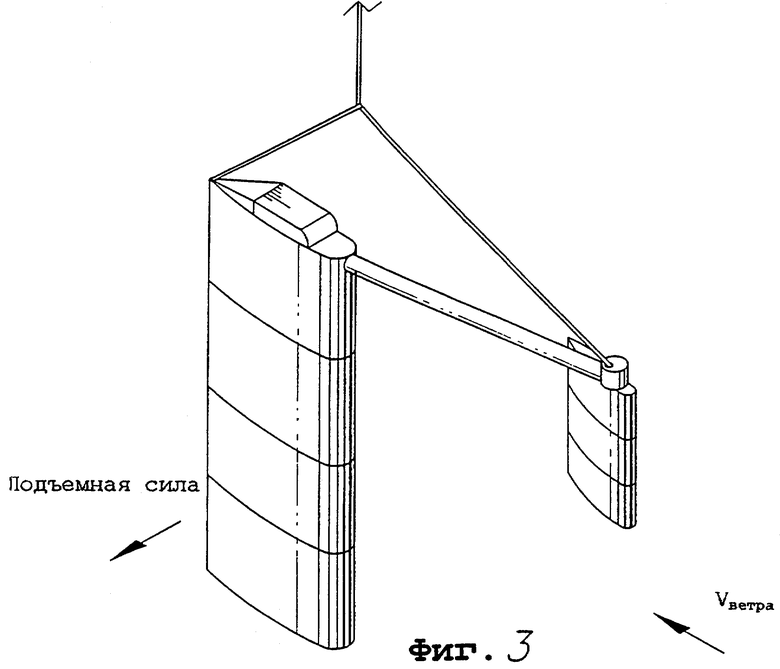
На фиг.3 представлен третий вариант устройства, выполненного по схеме "утка".
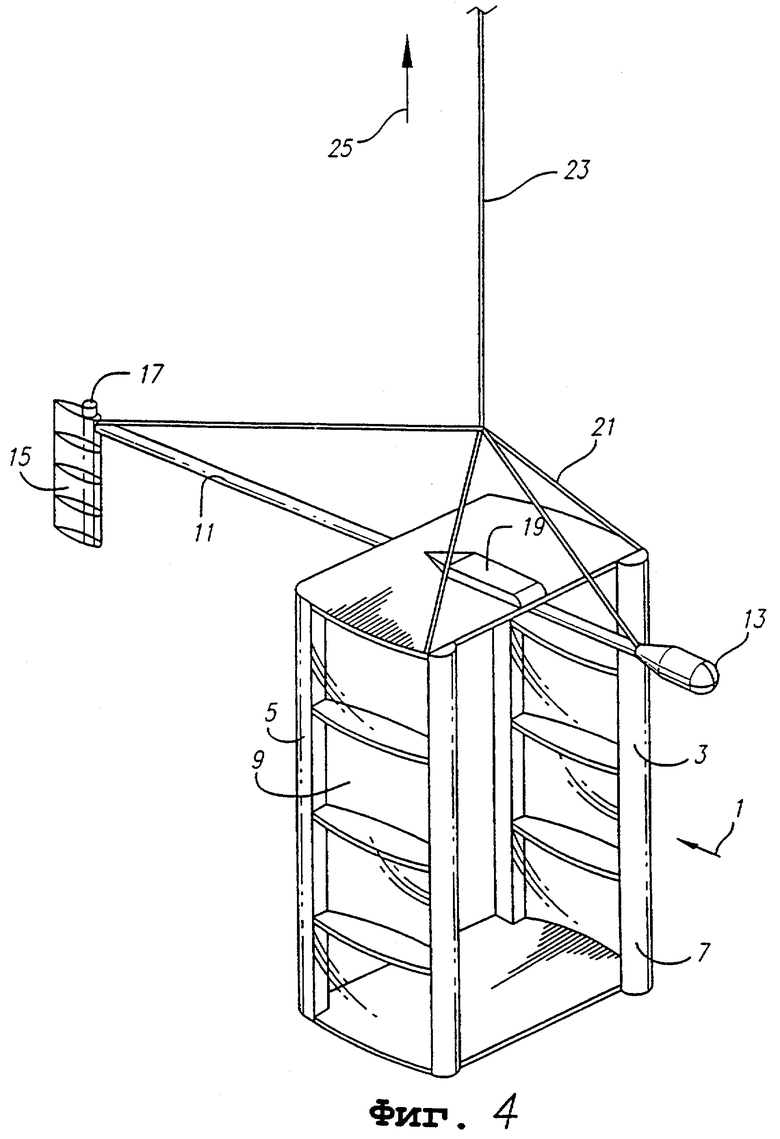
На фиг.4 представлен четвертый вариант устройства, выполненного в виде биплана.
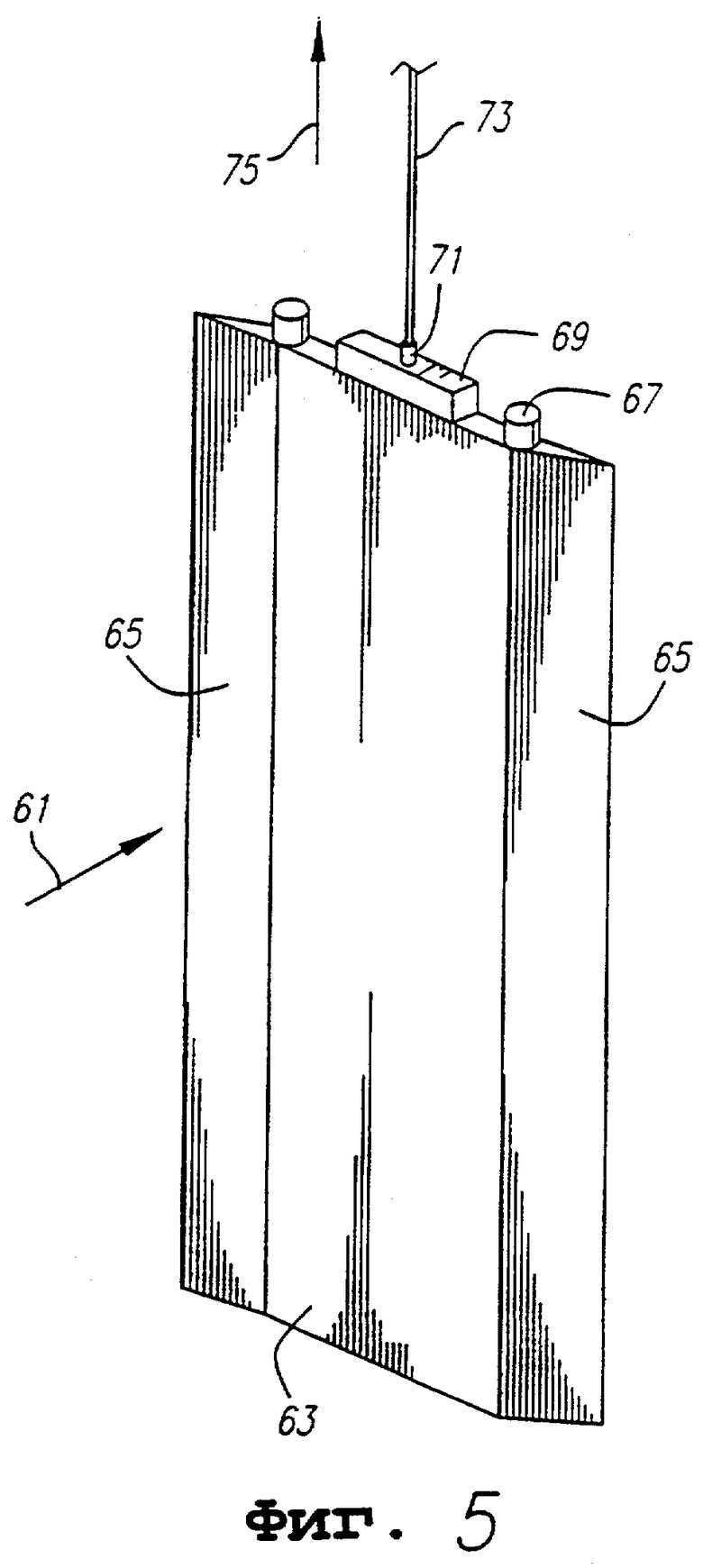
На фиг.5 представлен пятый вариант устройства с использованием вертушки.
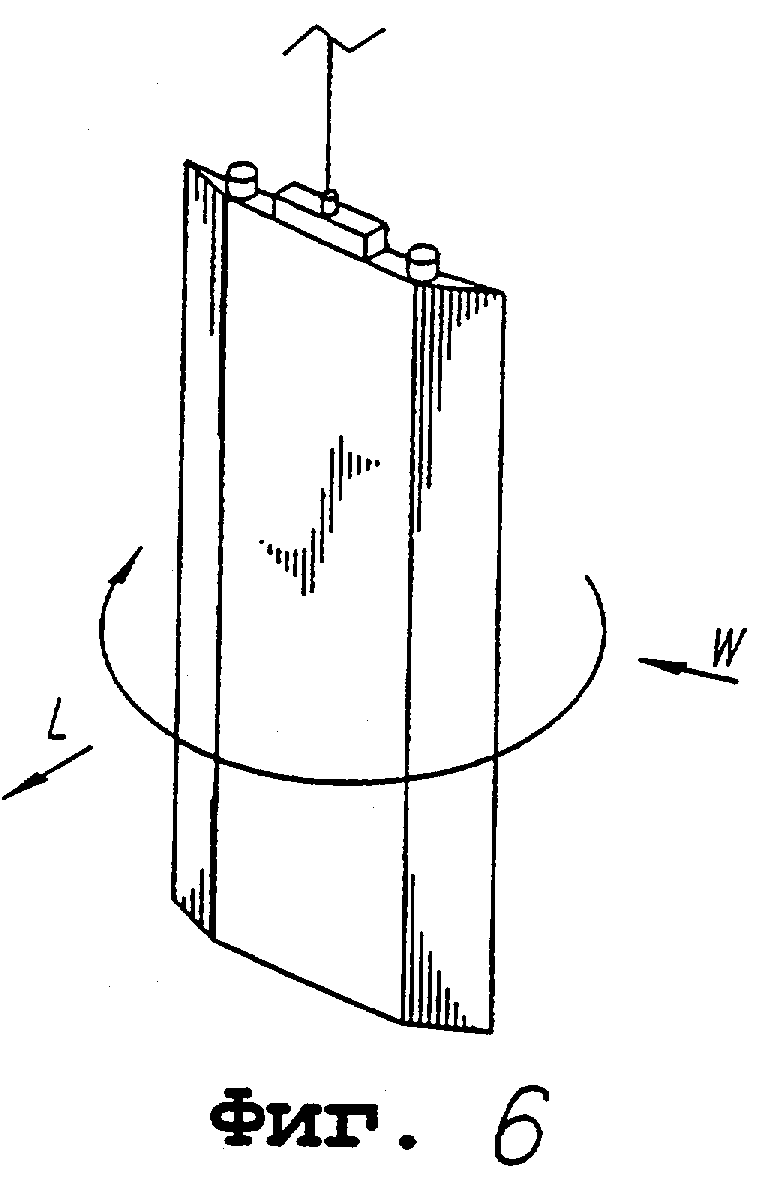
На фиг.6 указано направление вращения вертушки в потоке ветра.
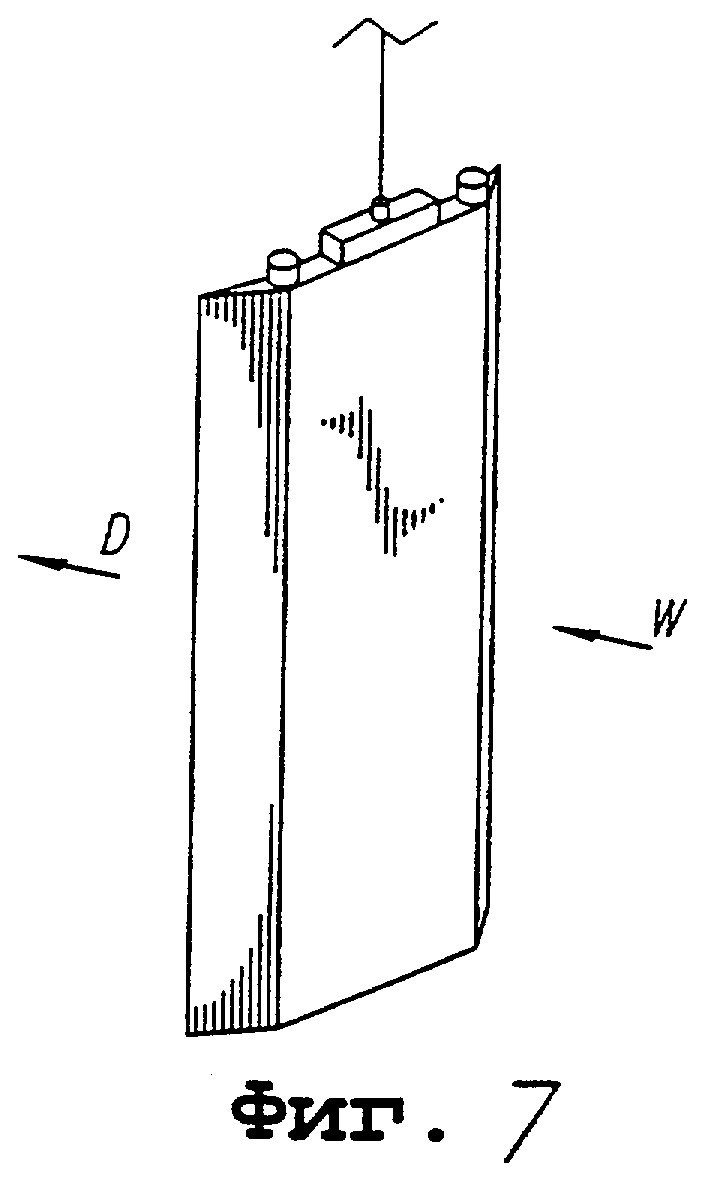
На фиг.7 представлена невращающаяся вертушка с симметрично развернутым закрылком управления.
На фиг.8 представлен вариант вертушки с тремя панелями.
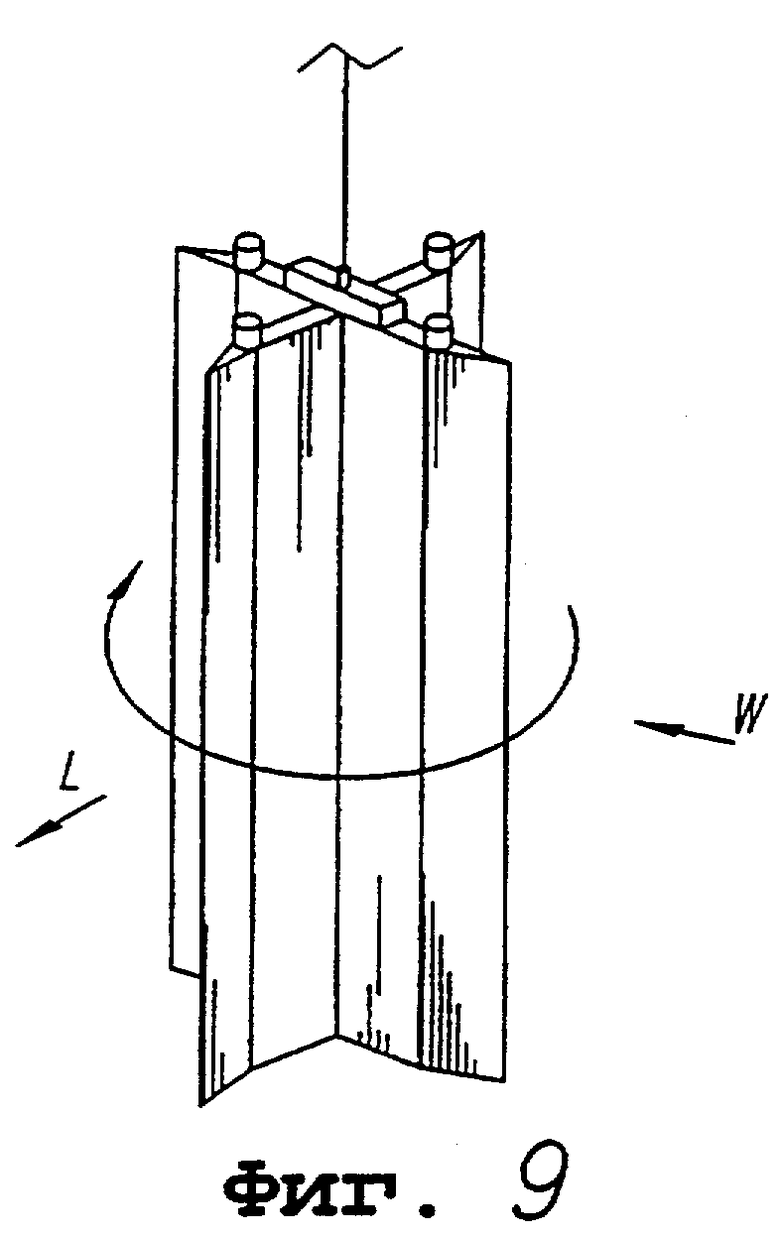
На фиг.9 представлен вариант вертушки с четырьмя панелями.
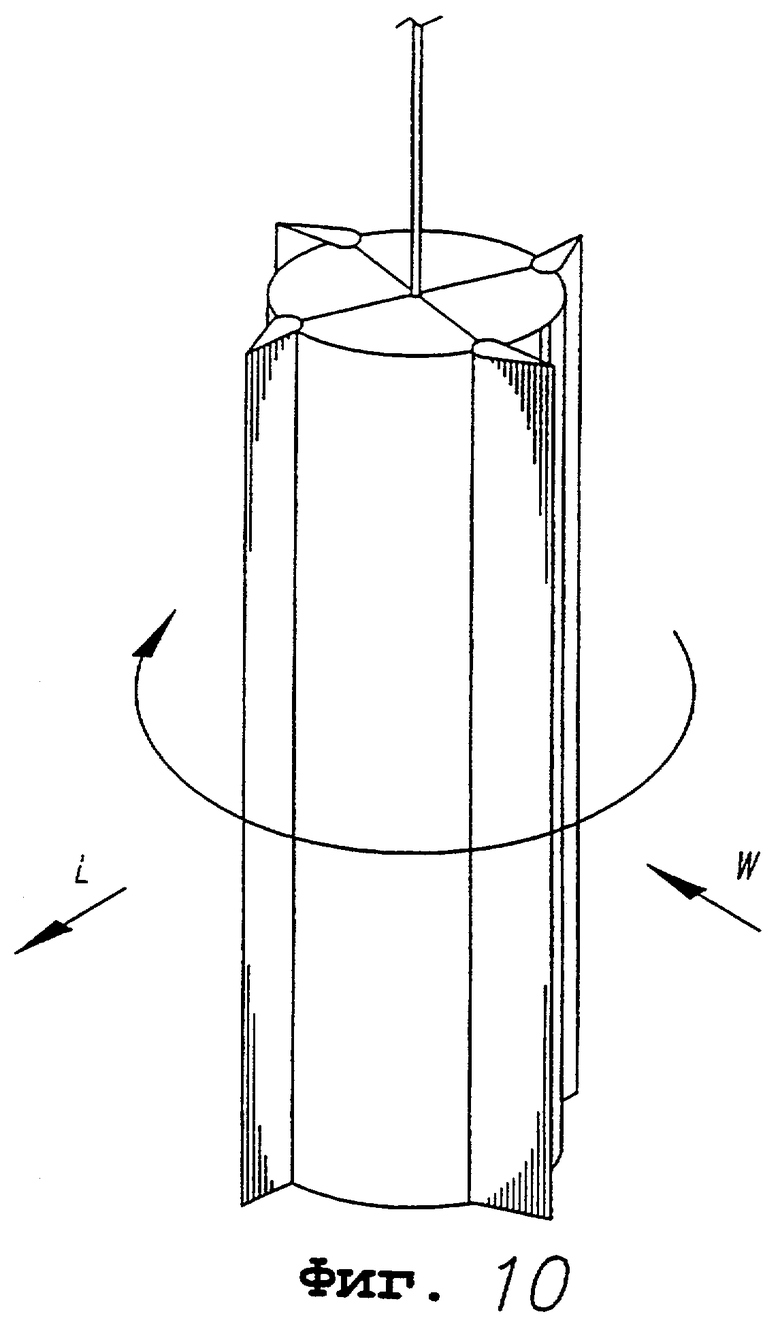
На фиг.10 представлен вариант вертушки, имеющей цилиндрическое поперечное сечение.
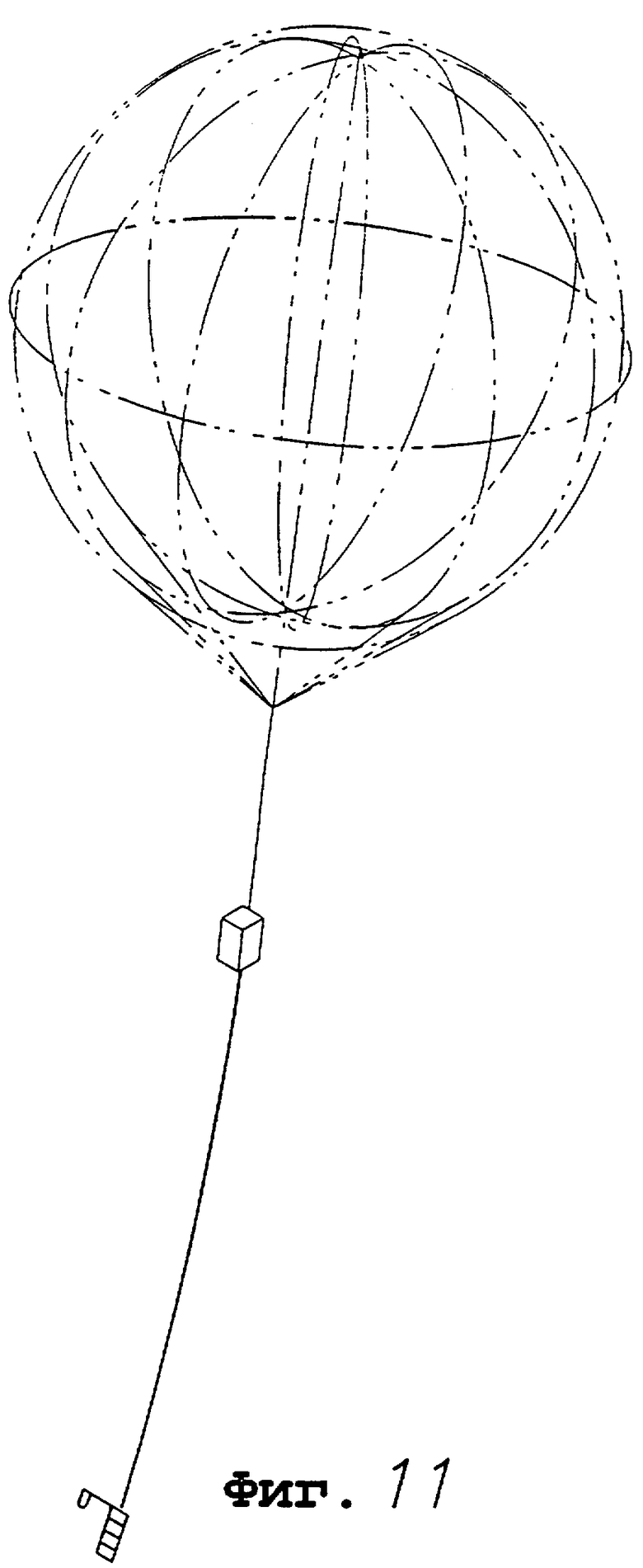
На фиг.11 представлен первый вариант устройства управления, подвешенного к летательному аппарату ЛВЧ, такому как аэростат.
На фиг.12 представлено известное устройство, аналогичное вертушке.
Подробное описание предпочтительных вариантов осуществления настоящего изобретения.
Предпочтительный вариант устройства для управления траекторией в соответствии с настоящим изобретением представлен схематически на фиг.1. Главным элементом, создающим подъемную силу, является крыло 1, содержащее передний лонжерон 3, задний лонжерон 5 и ряд нервюр 7. Передний лонжерон 3, задний лонжерон 5 и нервюры 7 образуют каркас обшивки 9. Крыло 1 крепится к балке 11 с передним концом и задним концом. Противовес 13 крепится к переднему концу балки 11. Руль направления 15 и его приводной механизм 17 крепятся к заднему концу балки. Модуль управления 19 устанавливается в удобном месте на устройстве управления. При необходимости модуль управления может содержать источник тока, содержащий аккумуляторную батарею и солнечную панель. При помощи траверсы 21 балка 11 соединяется с тросом 23. Верхняя часть троса крепится к лебедке 25 (на рисунке не показана), которая устанавливается на одной из составных частей летательного аппарата ЛВЧ (например, в гондоле аэростата).
Устройство управления траекторией аэростата, представленное на фиг.1, подвешивается к летательному аппарату ЛВЧ, например к гондоле аэростата, при помощи троса 23, имеющего сравнительно большую длину, которая может достигать нескольких километров. Наличие длинного троса 23 дает возможность опустить устройство управления траекторией аэростата в такой слой атмосферы, в котором направленность или скорость ветра существенно отличаются от аналогичных характеристик ветра на высоте аэростата. Типовые профили ветра представлены на фиг.30.1 в работе "A Comparison of Several Very High Altitude Station Keeping Balloon Concepts" by J.J.Vorachek, упомянутой выше.
Трос 23 сматывается с барабана лебедки 25, установленной на летательном аппарате ЛВЧ. Лебедка 25 может иметь механический привод или состоять из одного барабана, обеспечивающего своей инерционной массой плавное опускание на землю устройства управления траекторией на тросе 23 под действием его собственного веса. В последнем случае в конце полета аэростата устройство управления может быть отсоединено от троса 23 и опущено на парашюте. Если лебедка 25 снабжена механическим приводом, она может использоваться для подъема или опускания устройства управления на желаемую высоту или же для возвращения его в устройство. На спортивном аэростате лебедка 25 может приводиться во вращение вручную или даже вообще не использоваться. В определенных ситуациях устройство управления траекторией аэростата может подниматься и опускаться вручную без всяких приспособлений.
Трос 23 может представлять собой проволочный канат или веревку, свитую, например, из кевларовых нитей. Вообще говоря, трос 23 может быть гибким механическим соединение, например, цепью из жестких звеньев. Абсолютно жесткий трос может привести к серьезным конструктивным ограничениям его длины ввиду большого веса компонентов. Балка 11 может быть простым жестким элементом конструкции, предназначенным для установки отдельных компонентов системы. Функция этого элемента может выполняться также рамой соответствующей конструкции, причем не обязательно жесткой, подходящей для этой цели. Рулем направления 15 может быть простая плоскость жесткой конструкции, используемая для изменения ориентации системы и имеющая подходящую форму для этой цели.
Угол атаки устройства, создающего подъемную силу (например, крыла), является углом между относительным направлением ветра и расчетной линией хорды (т.е. линией, соединяющей переднюю и заднюю кромки крыла). Определение угла атаки можно найти в большинстве текстов, посвященных вопросам аэродинамики. Сравнительно точное определение угла атаки, которое мы включаем в данный текст посредством ссылки, дается, например, на странице 10 книги "Dynamics of Flight - Stability and Control", second edition, by Bernard Etkin, Wiley and Sons 1982. Угол атаки крыла 1 регулируется установкой угла руля направления 15 посредством приводного механизма 17, который находится под контролем модуля 19 управления. Такое расположение небольшой рулевой поверхности за большой несущей поверхностью очень сходно с расположением крыла и стабилизатора/руля высоты самолета. Оно также очень сходно с расположением киля и руля поворота парусного судна.
Для обеспечения устойчивости крыла в рабочем положении центр массы подвешенного устройства должен находиться немного впереди аэродинамического фокуса, определяемого таким же образом, как и аэродинамический фокус самолета. Если точка подвески крыла, которая будет находиться почти над центром его массы, окажется слишком смещенной назад, система повернется вокруг своей оси, возможно задней кромкой вперед, или будет рыскать по курсу при срыве потока с поверхности крыла. Хотя такие условия не являются основным расчетным режимом работы крыла, они могут быть предпочтительными при определенном состоянии ветра, когда лобовое сопротивление действует с наибольшей силой в желаемом направлении. Движущаяся масса может учитываться в конструкции устройства управления в качестве фактора смещения его центра тяжести для достижения вышеуказанного эффекта. Так, для обеспечения нормальных условий полета (т.е. без аэродинамического срыва) крыла 1 центр его массы должен быть выдвинут вперед на достаточно большое расстояние, чтобы сделать необходимой установку противовеса 41. Поскольку летательные аппараты ЛВЧ обычно имеют жесткие ограничения по весовым характеристикам, увеличение "мертвого" веса нежелательно. По этой причине модуль 19 управления, вес которого может составлять значительную часть общего веса системы, может устанавливаться немного впереди устройства, создающего подъемную силу, и таким образом выполнять дополнительно функцию противовеса. Однако, как и в случае с самолетом, вынос центра массы слишком далеко вперед уменьшает возможность руля управлять углом атаки главного крыла 1. Целесообразно размещать центр массы в пределах такого же диапазона, как и в дозвуковых самолетах. У последних центр массы обычно находится впереди аэродинамического фокуса на расстоянии, равном примерно от 5% до 15% длины средней хорды крыла. Определение положения аэродинамического фокуса связано с некоторыми трудностями, однако методика такого определения обычно знакома рядовым специалистам в данной области и описывается в многочисленных источниках. Условия обеспечения продольной устойчивости самолета описываются на страницах 479-483 книги "Аэродинамика, аэронавтика и механика полета ("Aerodynamics, Aeronautics, and Flight Mechanics", by B.W.McCormick, Wiley 1979), которые включаются в данный текст посредством ссылки. Крыло и горизонтальный стабилизатор самолета аналогичны по своей аэродинамике крылу 1 и рулю направления 15 устройства для управления траекторией аэростата. Поперечный компонент усилия, создаваемого тросом 23, играет ту же роль, что и вес самолета в решении уравнений момента относительно его поперечной оси.
По аналогии с самолетом устройство управления траекторией может быть также выполнено по схеме "утка". В этой схеме меньшая стабилизирующая поверхность размещается впереди главной несущей поверхности. Этот вопрос будет рассмотрен более подробно несколько ниже.
В зависимости от конкретных нужд полета аэростата модуль 19 управления может получать команды из гондолы аэростата по радио или с использованием других средств связи. В альтернативном варианте работа модуля 19 управления может быть запрограммирована заранее до запуска аэростата.
Одним из преимуществ предложенного устройства является его способность работать в различных режимах сложности в зависимости от степени участия указанного устройства в управлении траекторией аэростата. Например, если требуется только создать поток воздуха, который бы уносил в сторону от аэростата загрязняющие атмосферу вещества для улучшения работы чувствительных приборов, то достаточно установить руль направления 15 на постоянный угол до начала полета. Этот угол можно определить исходя из желаемой относительной скорости полета и имеющихся данных о предполагаемых ветрах на высотах аэростата и крыла 1.
Господствующие ветры дуют обычно в восточном или западном направлении в зависимости от времени года. Аэростат длительного пользования может облететь землю несколько раз. Для обеспечения общего дрейфа аэростата по отношению к полюсу земли (или, возможно, в сторону от полюса по направлению к экватору), угол руля направления может быть установлен до начала полета в соответствии с имеющимися в наличии данными о господствующих ветрах и желаемом направлении дрейфа.
Если устройство управления предназначено для использования аэронавтом-спортсменом в полете на дальность, может оказаться достаточной схема управления "лево руля-0-право руля". Аэронавт может передать устройству управления команду, соответствующую максимальной подъемной силе влево, максимальной подъемной силе вправо или подъемной силе, равной нулю. Это позволит аэронавту держаться в стороне от населенных районов и поможет ему достичь желаемого места посадки. При полете в режиме рулевой подъемной силы (при нулевом угле атаки) единственной значительной аэродинамической силой, действующей на аэростат, будет сопротивление воздуха, которое оказывает сравнительно небольшое влияние на скорость дрейфа аэростата.
Более сложная схема, например при режиме автономного управления, может предусматривать поочередную смену галсов при дрейфе по ветру путем выдачи соответствующих команд на крыло 1. В результате крыло будет совершать длинные зигзагообразные движения, пересекающие усредненную траекторию полета. Такие движения будут повышать относительную скорость ветра, действующего на крыло, и, следовательно, увеличивать максимальную аэродинамическую силу. Указанная схема может обеспечить значительно более активное управление траекторией аэростата, требуя, однако, более сложного набора алгоритмов управления.
Если траектория полета достаточно хорошо известна перед полетом, можно запрограммировать контроллер заранее, устранив, таким образом, потребность в канале управления. В этом случае в состав оборудования аэростата включается навигационная система (например, блок спутниковой системы радиоопределения).
Поскольку в состав полезного груза (находящегося в гондоле) может входить канал управления, включающий, например, автоматическую радиостанцию, не нуждающуюся в операторах, может потребоваться другой канал управления в виде, например, провода в тросе, соединяющего гондолу и устройство управления траекторией для передачи этому устройству соответствующих команд. Альтернативным вариантом мог бы явиться отдельный канал непосредственной передачи команд на устройство управления с земли.
При использовании пассивных способов управления траекторией, которые рассматривались выше, отсутствует необходимость в источнике энергии, поскольку руль направления может быть заранее установлен в нужное положение. При активных способах управления источник энергии необходим для передвижения руля направления 15 и, возможно, для обеспечения связи с системой летательного аппарата ЛВЧ. Источники энергии могут быть разными. Для выполнения кратковременных полетов может оказаться достаточной первичная (неперезаряжаемая) батарея. Для более длительных полетов выбор может быть в пользу панели солнечных батарей, соединенной с подзаряжаемой батареей для продолжения работы в темноте.
При соединении устройства управления траекторией с таким летательным аппаратом, как дирижабль, это устройство может создавать составляющую подъемной силы против ветра примерно так, как это происходит при движении парусного судна галсами. Преимущества крыла, используемого для повышения эффективности силовой установки дирижабля, заключаются в том, что крыло работает в гораздо более плотных слоях атмосферы, чем указанная установка, и поэтому может создавать значительную аэродинамическую силу, уменьшающую нагрузку на силовую установку дирижабля.
При использовании многих из рассмотренных выше схем управления траекторией аэростата требуется установка ряда датчиков для получения необходимых аэродинамических данных. В комплект таких датчиков обычно входят измерители угла атаки, скорости ветра, температуры, давления, влажности, и т.д. При использовании схем управления, основанных на принципе выбора оптимальной высоты для повышения эффективности устройства управления траекторией, может оказаться целесообразным способ рассредоточения отдельных приборов по длине троса для производства необходимых измерений на разных высотах.
Второй вариант устройства управления траекторией аэростата представлен на фиг.2. Основная часть подъемной силы создается элементом 31, содержащим обратный парус 33, мачту 35 и множество баттенсов 37. Парус 33 и мачта 35 крепятся к балке 39, имеющей передний конец и задний конец. Противовес 41 крепится к переднему концу балки. Руль 43 направления и приводной механизм 45 руля крепятся к заднему концу балки. Модуль 41 управления устанавливается в удобном месте. При необходимости модуль 41 управления может содержать источник энергии (на рисунке не показан), состоящий из аккумуляторной батареи и панели солнечных батарей. Траверса 49 соединяет балку с тросом 51. Верхний конец троса крепится к лебедке 53 (не показана), устанавливаемой в системе летательного аппарата ЛВЧ (например, в гондоле аэростата).
Работа парусного варианта устройства управления траекторией аэростата очень сходна с работой устройства в виде крыла (фиг.1).
От паруса, казалось бы, следует ожидать менее высоких аэродинамических характеристик, чем от крыла с его двусторонним аэродинамическим профилем. Однако этот недостаток может компенсироваться такими преимуществами паруса, как меньшая стоимость оборудования и меньший вес. Действительно, в этом варианте можно использовать уже имеющийся лодочный парус и обойтись без разработки индивидуального проекта.
Баттенсы представляют собой тонкие ребра жесткости, вставленные в горизонтальные карманы, которые вшиваются в парус для придания жесткости материалу паруса, улучшения его аэродинамической формы и уменьшения полоскания на ветру. Они часто используются на парусных катамаранах, имеющих более высокую скорость, чем обычные парусные суда. Хотя баттенсы 37 и не требуются для обеспечения нормальной работы устройства управления траекторией, предполагается, что они будут улучшать его характеристики по той же причине, по которой они используются на парусных судах.
Руль направления, представленный на фиг.2, является "летающей" поверхностью управления в том смысле, что вся его аэродинамическая поверхность может вращаться. С точки зрения конструкции устройства управления, предпочтительным вариантом может быть более традиционная схема с неподвижным килем и подвижным рулем направления. Любая из этих схем будет выполнять функции стабилизации флюгерного движения главной несущей поверхности и регулирования ее угла атаки.
Модуль 47 управления, представленный на фиг.2, выдвинут несколько вперед, поэтому частично выполняет роль противовеса.
Третий вариант устройства управления траекторией аэростата представлен на фиг.3. В этом варианте стабилизирующая поверхность находится впереди главной несущей поверхности. При использовании этой схемы на самолете небольшой стабилизатор, находящийся впереди, равным образом как и вся схема, называется "уткой".
Работа схемы "утка" очень сходна с работой предпочтительного варианта осуществления настоящего изобретения с обычным расположением стабилизатора позади главного крыла. Хотя схема "утка" кажется неустойчивой, требование к расположению центра тяжести впереди аэродинамического фокуса выполняется как в этой, так и в традиционной схемах.
Четвертый вариант устройства управления траекторией аэростата представлен на фиг.4. В этом варианте главный элемент, создающий подъемную силу, выполнен в виде биплана при традиционном расположении стабилизатора за задними крыльями.
Работа устройства управления с бипланом (трипланом или с еще большим количеством плоскостей) аналогична работе устройства с одним крылом. Преимущество данной конфигурации заключается в том, что коробчатая конструкция обладает большей прочностью, чем моноплан. Равным образом, руль направления может также иметь многоплоскостную конструкцию.
Пятый вариант устройства управления траекторией аэростата представлен на фиг.5. Устройство управления содержит вертушку 61, которая поворачивает это устройство по ветру, создавая одновременно подъемную силу.
Вертушка 61 содержит панель 63 и по меньшей мере один закрылок 65 управления с по меньшей мере одним приводным механизмом 67. Конкретный вариант изобретения, представленный на фиг.5, имеет два закрылка 65 управления, установленные на шарнирах таким образом, что угол между закрылками и панелью может регулироваться. Модуль 69 управления устанавливается в удобном месте. Он содержит, при необходимости, источник энергии (на рисунке не показан), состоящий из аккумуляторной батареи и панели солнечных батарей. При помощи шарнира 71 вертушка 61 соединяется с тросом 73 лебедки 75 (не показана), установленной на летательном аппарате ЛВЧ.
Вертушка может быть выполнена различными способами, известными специалистам в области изготовления легких аэродинамических плоскостей. Например, нервюры могут быть изготовлены из легких труб с покрытием из легкой ткани или полимерной пленки. Для некоторых видов полетов панели могут изготавливаться из цельного пенопласта низкой плотности типа Styrofoam. Все вышесказанное в равной степени относится ко всем вариантам осуществления настоящего изобретения.
По своей конструкции вертушка 61 представляет собой устройство, которое при вращении ветром развивает подъемную силу подобно воздушному змею или другим игрушкам. На фиг.12, где схематически изображены известная конструкция вертушки, указаны направления ветра и подъемной силы. Само явление возникновения силы, направленной перпендикулярно к относительному направлению потока воздуха, известно под именем эффекта Магнуса, которым объясняется криволинейность воздушных шаров, используемых в спортивных целях. Описание этого эффекта приведено на странице 265 книги "Механика жидкостей" и включено в данный текст посредством ссылки (см. "Mechanics of Fluids", third edition, by B.S.Massey, Van Nostrand, 1976). Известное устройство вертушки содержит эллиптическую пенопластовую лопатку с S-образным поперечным сечением и стержнем жесткости, совпадающим с осью эллипса. Концы этого стержня крепятся при помощи шарниров к серьге бечевки, которая привязывается к бечевке змея. При вращении игрушки в потоке ветра со стержнем, находящимся в горизонтальном положении, возникает вертикальная подъемная сила, величина которой оказывается достаточной для преодоления силы тяжести игрушки. Устойчивость игрушки обеспечивается конструкцией центрального диска.
Вертушка 61, представленная на фиг.5, основана на том же принципе, хотя ее ось находится не в горизонтальном, а в вертикальном положении, в результате чего подъемная сила направлена не вверх, а в сторону. Вертушка 61 подвешивается на длинном тросе к летательному аппарату ЛВЧ таким образом, чтобы она находилась преимущественно в относительно горизонтальном потоке воздуха. При несимметричном развертывании закрылков 65 управления, как показано на фиг.5, вертушка 61 вращается вокруг своей оси, находящейся примерно в вертикальном положении. На фиг.6 показано направление вращения вертушки, а также направление ветра W и направление подъемной силы L. Вертушка будет вращаться в указанном направлении независимо от направления ветра W. Направление вращения вертушки можно изменить путем поворота обоих закрылков в противоположном направлении на тот же угол. Такой поворот обеспечит, при желании, изменение направления действия подъемной силы. Другими словами, переориентация закрылков 65 на фиг.6 с установкой их в противоположном направлении приведет к изменению на обратное как направления вращения вертушки, так и направления возникающей подъемной силы L.
При симметричном развертывании закрылков 65 вращение устройства прекращается, и панель 63 устанавливается широкой стороной против ветра с двумя закрылками 65 углом назад. В результате вертушка создает чистое лобовое сопротивление, которое, в зависимости от направления ветра и желаемой траектории, может оказаться предпочтительным. На фиг.7 представлен вариант с двумя закрылками, развернутыми симметрично, и с указанием направления силы лобового сопротивления D, создаваемого ветром W.
Пользуясь возможностями, показанными на фиг.6 и фиг.7, можно создать целый диапазон эффективных сил путем простой регулировки положения каждого из закрылков. Относительные углы закрылков могут меняться в диапазонах между крайними значениями положений "вверх" и "вниз". Кроме того, циклическое изменение положений закрылков в соответствующей последовательности может создавать результирующую или усредненную силу.
На фиг.8 представлен альтернативный вариант вертушки с тремя панелями 63 и тремя закрылками 65. На фиг.9 показан альтернативный вариант вертушки с четырьмя панелями 63 и четырьмя закрылками 65. Эти фигуры показывают, что число панелей 63 может значительно изменяться. Помимо этого, нет необходимости устанавливать закрылок 65 на каждой панели 63. Для обеспечения вращения вертушки один закрылок 65 может оказаться достаточным.
На фиг.10 представлен еще один вариант вертушки, в котором в качестве устройства, создающего подъемную силу, используется вращающийся цилиндр. В этом варианте также используются закрылки 65 для передачи цилиндру вращающего момента.
Таким образом, конструкция вертушки допускает различные модификации, которые способны обеспечить создание подъемной силы даже без механизма управления. Корпус вертушки в целом должен рассматриваться как приспособление, удобное для установки на вертушке закрылков, приводов закрылков и модулей управления (например, панель 63 на фиг.5 и цилиндр на фиг.10).
На фиг.11 представлен предпочтительный вариант устройства управления траекторией, которое может подвешиваться к аэростату или гондоле. Уменьшенный масштаб изображения несколько условен. Размеры устройства могут колебаться в довольно значительных пределах. Кроме того, на практике длина троса будет скорее всего больше той, которая показана на схеме, поэтому сама схема не должна служить основанием для какого-либо ограничения указанной длины.
Аэродинамическая сила, предназначенная для воздействия на летательный аппарат ЛВЧ, может создаваться любым способом. Конкретные варианты осуществления предложенной концепции в виде различных устройств, создающих подъемную силу, приведены в данном тексте только в качестве примеров, которыми не исчерпывается объем настоящего изобретения.
Хотя объектом вышеприведенного подробного описания явились только несколько вариантов предложенного устройства, специалистам в данной области техники должно быть понятно, что указанные варианты могут подвергаться многочисленным изменениям без существенного отхода от предложенных новых технических решений и связанных с ними преимуществ. Соответственно, все подобные изменения должны считаться не выходящими за пределы объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗМЕЩЕНИЯ ВЫСОТНОЙ ПЛАТФОРМЫ И ВЫСОТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506204C1 |
| УПРАВЛЕНИЕ УСТРАНЕНИЕМ ОТКЛОНЕНИЯ ЗАКРЫЛКА КРЫЛА | 2017 |
|
RU2683698C2 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАКРЫЛКАМИ КРЫЛЬЕВ И ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ ГИБРИДНОГО ВЕРТОЛЕТА | 2013 |
|
RU2551830C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ВЕТРА НА ЛЕТАЮЩЕЙ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКЕ | 2018 |
|
RU2697075C1 |
| Индивидуальный летательный аппарат (варианты) и способы его полета | 2017 |
|
RU2671447C1 |
| СПОСОБ ПОЛЕТА В ВОЗДУХЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2184685C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ВЫСОТНОЙ ПОДВЕСКИ ИНФОРМАЦИОННОЙ СИСТЕМЫ И НЕСУЩИЙ АЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2392188C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2391253C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2015 |
|
RU2594839C1 |



Изобретения относятся к области летательных аппаратов легче, чем воздух. Устройство выполнено в виде крыла, создающего подъемную силу, подвешивается к аэростату на длинном тросе в вертикальном положении и предназначено для использования естественно изменяющейся силы ветра на разных высотах. Крыло способно создавать горизонтальную подъемную силу, действие которой может целенаправленно изменяться в пределах широкого диапазона углов. Указанная сила передается аэростату через трос. Наличие этой силы позволяет менять траекторию аэростата в зависимости от соотношения размеров аэростата и крыла. Для управления системой требуется сравнительно небольшая мощность, создаваемая, например, рулем направления, поскольку управляющая сила создается, в основном, за счет энергии ветра, которая и выполняет большую часть необходимой работы. Изобретения направлены на уменьшение количества полетов, прерываемых из-за невозможности управлять их траекторией, и упрощение процедуры получения разрешений на запуск аэростата ввиду возможности выполнять полет по заданному пути в более широком диапазоне погодных условий. 6 с. и 19 з.п. ф-лы, 12 ил.
| СПОСОБ ВЫРАБОТКИ ХЛЕБНОГО КВАСА | 2015 |
|
RU2588821C1 |

