Группа изобретений относится к области авиационной техники и может быть использована в конструкции пилотируемых индивидуальных летательных аппаратов (ЛА), которые могут осуществлять вертикальный взлет и посадку.
Известны индивидуальный летательный аппарат и способ его полета (US 2003094537 А1, 22.05.2003), выбранные в качестве прототипа. ЛА содержит корпус, два крыла, снабженных закрылками и закрепленных в центральной части корпуса, вертикальный стабилизатор, снабженный рулем направления, ручные и ножные элементы управления, расположенные в кабине индивидуального ЛА, и четыре поворотных силовых агрегата, выполненных на крыльях так, что силовые агрегаты одной боковой стороны расположены симметрично относительно продольной оси корпуса силовым агрегатам другой боковой стороны, причем каждый силовой агрегат представляет собой двигатель с воздушными винтами и выполнен с возможностью поворота в месте своего закрепления вокруг оси, перпендикулярной продольной оси корпуса и лежащей в его плоскости, при этом летательный аппарат сконфигурирован для размещения в его кабине пилота в сидячем положении..
Способ характеризуется тем, что запускают находящиеся в плоскости корпуса силовые агрегаты ЛА, стоящего на опорной поверхности на шасси, и осуществляют вертикальный взлет, далее, переводя силовые агрегаты в вертикальное положение, осуществляют полет в горизонтальном и вертикальном направлениях, используя при этом изменения скоростей вращений двигателей с воздушными винтами, руль направления, закрылки и рули высоты.
Данный аппарат является легкомоторным самолетом с выполненными на его крыльях двигателями с воздушными винтами. Способ полета не обеспечивает возможность маневрирования без достаточной горизонтальной скорости. ЛА является громоздким и не предназначен для городских условий. Кроме того, его конструкция явно ненадежна.
Задачей настоящего изобретения является создание компактного, принципиального иного индивидуального ЛА с возможностями вертикального взлета и посадки, а также полета в различных режимах на выбор пилота, по принципу самолета или по принципу такого ЛА, как квадрокоптер, при этом обеспечивающего удобство пользования за счет малых размеров.
Техническим результатом является повышение удобства пользования за счет компактности предлагаемого решения, а также обеспечение более высоких аэродинамических характеристик предлагаемого ЛА за счет меньшего лобового сопротивления и улучшенной аэродинамической устойчивости.
К достигаемым техническим результатам можно отнести повышение надежности конструкции за счет выполнения единого аэродинамического Х-образного корпуса с интегрированными поворотными силовыми установками на его концах и расширение функциональных возможностей ЛА за счет различных вариантов взлета и, соответственно, посадки и режимов полета.
Технические результаты достигается тем, что индивидуальный летательный аппарат содержит Х-образный корпус, два раздвижных крыла, снабженных закрылками и закрепленных на передних концах корпуса с возможностью поворота по оси, перпендикулярной плоскости корпуса в месте их крепления, или четыре раскладных крыла, закрепленных на передних концах корпуса с закрылками и на задних концах с рулями высоты и выполненных с возможностью раскладываться в плоскость корпуса из положения, перпендикулярного плоскости корпуса, вертикальный стабилизатор, снабженный рулем направления, ручные и ножные элементы управления, расположенные в передней и задней частях корпуса соответственно, и четыре силовых агрегата, выполненных с возможностью поворота и закрепленных на концах корпуса так, что силовые агрегаты одной боковой стороны расположены симметрично относительно продольной оси корпуса силовым агрегатам другой боковой стороны, причем каждый силовой агрегат представляет собой двигатель с воздушными винтами в защитном кожухе. При этом корпус выполнен с возможностью размещения на нем пилота в положении, в котором фронтальная плоскость пилота параллельна плоскости корпуса.
По одному из вариантов осуществления предлагаемого изобретения на передней части корпуса выполнен аэродинамический обтекатель пилота.
По другому варианту осуществления корпус снабжен элементами крепления-страховки пилота.
По третьему варианту могут быть выполнены шасси на концах четырех раскладных крыльев.
Также указанные технические результаты достигаются в способе полета индивидуального летательного аппарата, включающем вертикальный взлет летательного аппарата, корпус которого располагается вертикально относительно опорной поверхности и выполнен с возможностью размещения на нем пилота в положении, в котором фронтальная плоскость пилота параллельна плоскости корпуса. Далее путем поворота силовых агрегатов в плоскость корпуса переводят его из вертикального положения в горизонтальное и либо осуществляют полет, маневрируя с помощью изменения скорости вращения каждого двигателя с воздушными винтами силового агрегата и/или изменения положения каждого силового агрегата относительно корпус, либо раздвигают два крыла с закрылками или раскладывают четыре крыла с закрылками и рулями высоты и осуществляют полет, маневрируя с помощью чего-то одного, всей совокупности или сочетания нескольких из нижеследующего: изменения скорости вращения каждого двигателя с воздушными винтами, изменения положения каждого силового агрегата относительно корпуса, руля направления на вертикальном стабилизаторе, закрылок, рулей высоты.
Кроме того, указанные результаты достигаются в способе полета индивидуального летательного аппарата, включающем взлет летательного аппарата, стоящего на опорной поверхности на четырех сложенных раскладных крыльях непосредственно, или на шасси, выполненных на их концах, в горизонтальном положении, при этом корпус летательного аппарата выполнен с возможностью размещения на нем пилота в положении, в котором фронтальная плоскость пилота параллельна плоскости корпуса. Далее либо осуществляют полет, маневрируя с помощью изменения скорости вращения двигателя с воздушными винтами каждого силового агрегата и/или изменения положения каждого силового агрегата относительно корпуса, либо раскладывают крылья с закрылками и рулями высоты и осуществляют полет, маневрируя с помощью чего-то одного, всей совокупности или сочетания нескольких из нижеследующего: изменения скорости вращения каждого двигателя с воздушными винтами, изменения положения каждого силового агрегата относительно корпуса, руля направления на вертикальном стабилизаторе, закрылок, рулей высоты.
В данном способе могут осуществлять вертикальный взлет. Также могут осуществлять горизонтальный взлет.. Х-образный корпус, выполняемый преимущественно обтекаемой аэродинамической формы, иначе говоря - корпус-крыло, с четырьмя поворотными силовыми агрегатами на его концах и раскладными или раздвижными крыльями обеспечивают, компактность, более высокие аэродинамические характеристики, улучшенное маневрирование и возможность выбора режима полета для различных целей. Возможны взлеты из вертикального и горизонтального положений аппарата относительно земли, как и посадка. Полет можно осуществлять как со сложенными крыльями, так и разложенными по типу квадрокоптера. С разложенными крыльями предлагаемой ЛА может осуществлять полет как обычный самолет, повернув силовые агрегаты после достижения определенной скорости перпендикулярно плоскости корпуса, по потоку.
Предлагаемая конструкция ЛА и способы взлета и посадки позволяет ему быть компактным и занимать меньше парковочного пространства, по сравнению с автомобилем, вплоть до домашнего размещения. Указанное существенно повышает удобство пользования.
Таким образом, предлагаемая группа изобретений обеспечивает повышенное удобство пользования благодаря компактности ЛА, более высокие аэродинамические характеристики за счет описанной конструкции и режимов взлета и полета.
Под «передними концами корпуса» и «задними концами корпуса» следует понимать конечные ответвления Х-образного корпуса в его передней и задней частях соответственно, на которых размещаются силовые агрегаты. В силу того, что корпус X-образный, подразумевается наличие у него четырех концов. При этом передние и задние части корпуса - это две части, которые образованы разделением корпуса пополам поперечным сечением и прилегают ближе к краям корпуса так, что между ними можно выделить среднюю часть корпуса.
Специалисту в данной области техники будет очевидно размещение вертикального стабилизатора с рулем направления в задней части корпуса между двумя силовыми агрегатами на его задних концах.
Под «фронтальной плоскостью» понимается общепринятый (в частности в медицине) термин, обозначающий плоскость сечения человека. Другими словами, пилот ложится или опирается всем телом на корпус ЛА, в зависимости от изначального положения ЛА относительно опорной поверхности - земли.
Под «опорной поверхностью» подразумевается плоская равнинная местность, земля, на которой стоит или относительно которой движется ЛА.
Под «вертикальным положением» понимается такое положение корпуса ЛА, в котором оно стоит вертикально на земле, опираясь на вертикальный стабилизатор и задние части корпуса. Силовые агрегаты при этом повернуты параллельно земле -опорной поверхности. В таком положении осуществляется вертикальный взлет.
Под «горизонтальным» положением при взлете следует понимать положение корпуса ЛА, опирающегося на четыре раскладных крыла в сложенном состоянии; т.к. передние крылья могут быть выполнены длиннее задних, то корпус будет находиться под некоторым углом к опорной поверхности. Взлет в данном случае может быть вертикальным, двигатели повернуты параллельно земли.
Также взлет может быть горизонтальным по подходящей для этого поверхности, т.е. по принципу обычного самолета, если на концах крыльев выполнены шасси. Сущность предлагаемого изобретения поясняется на фиг. 1-8.
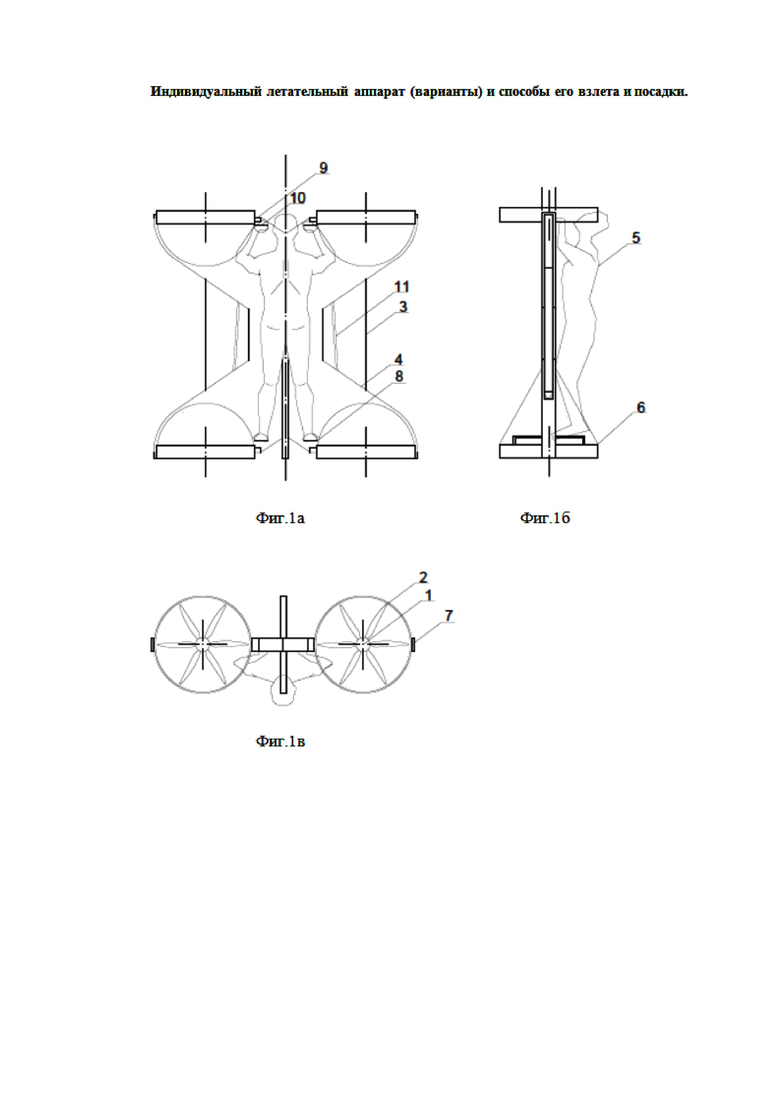
На фиг. 1а-1в представлены чертежи предлагаемого ЛА в вертикальном положении на опорной поверхности для варианта с двумя раздвижными крыльями.
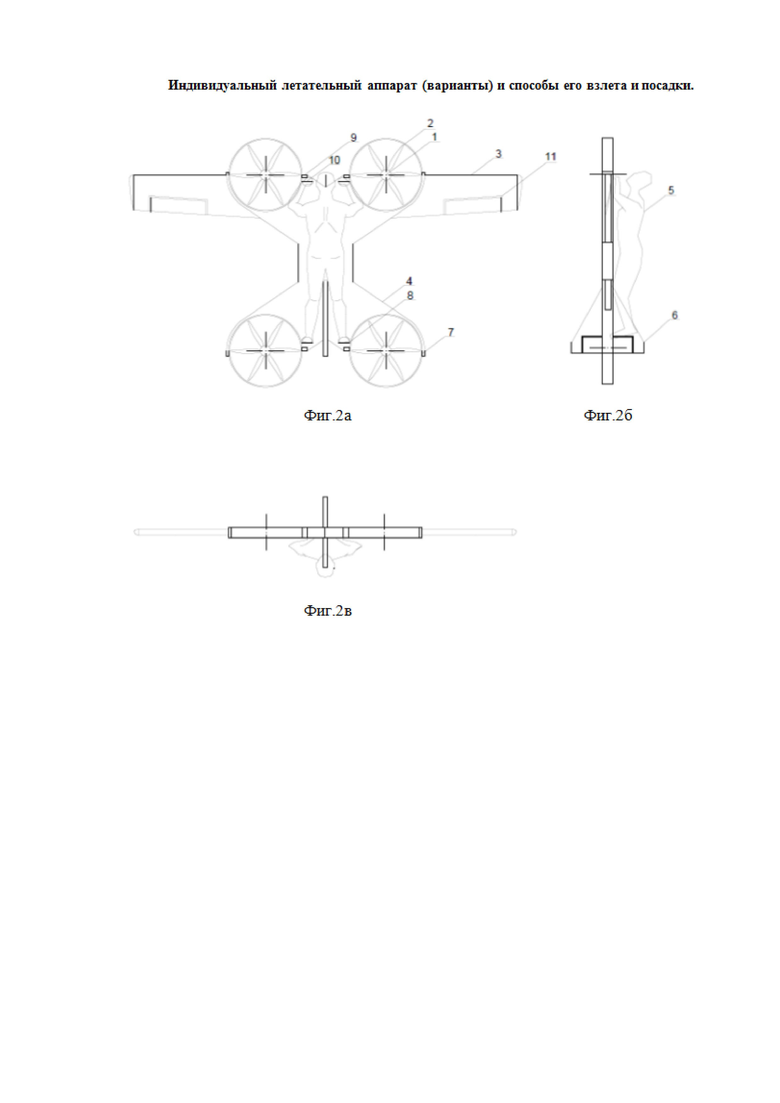
На фиг. 2а-2в представлены чертежи предлагаемого ЛА в горизонтальном положении для варианта с двумя разложенными раздвижными крыльями.
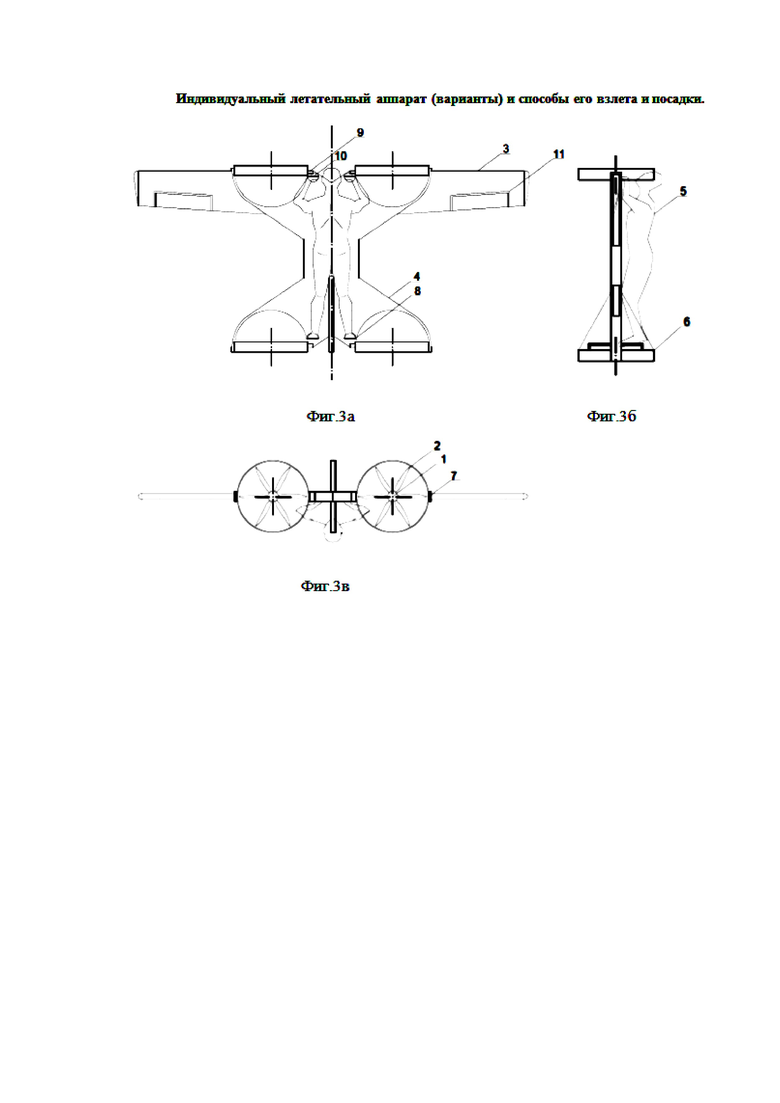
На фиг. 3а-3в представлены чертежи предлагаемого ЛА для варианта с двумя раздвижными крыльями и с повернутыми перпендикулярно плоскости корпуса силовыми агрегатами.
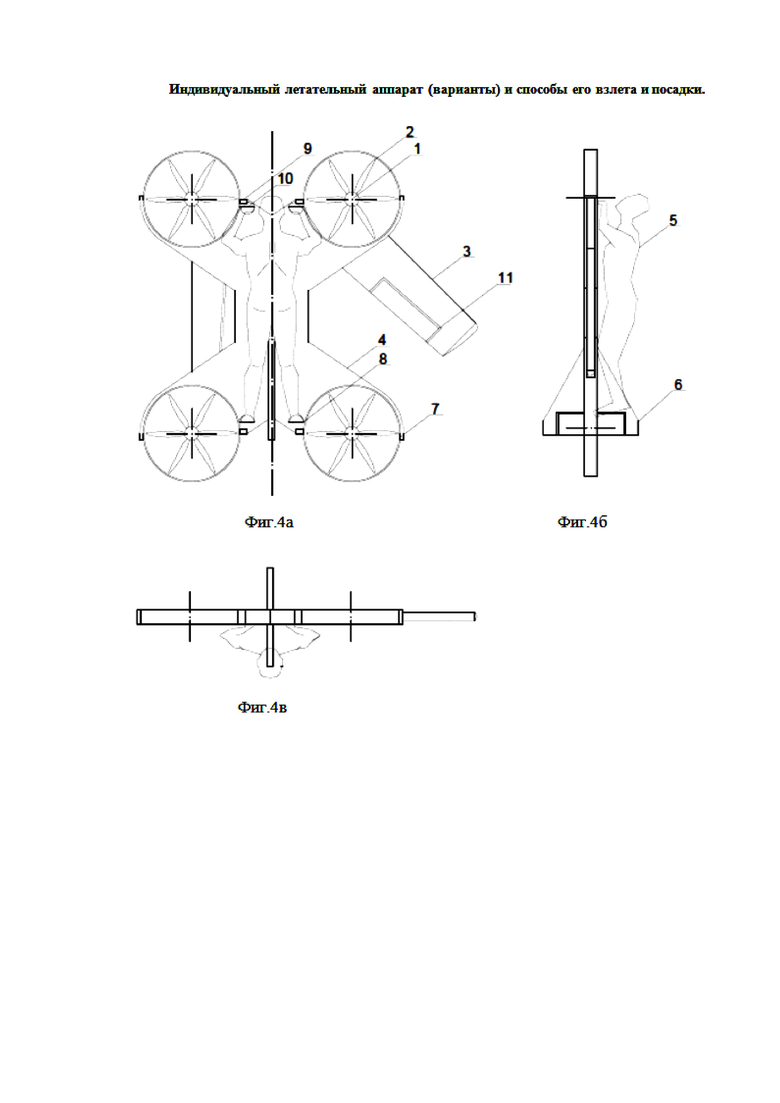
На фиг. 4а-4в показаны чертежи предлагаемого ЛА в горизонтальном положении с показанным раздвижением крыла.
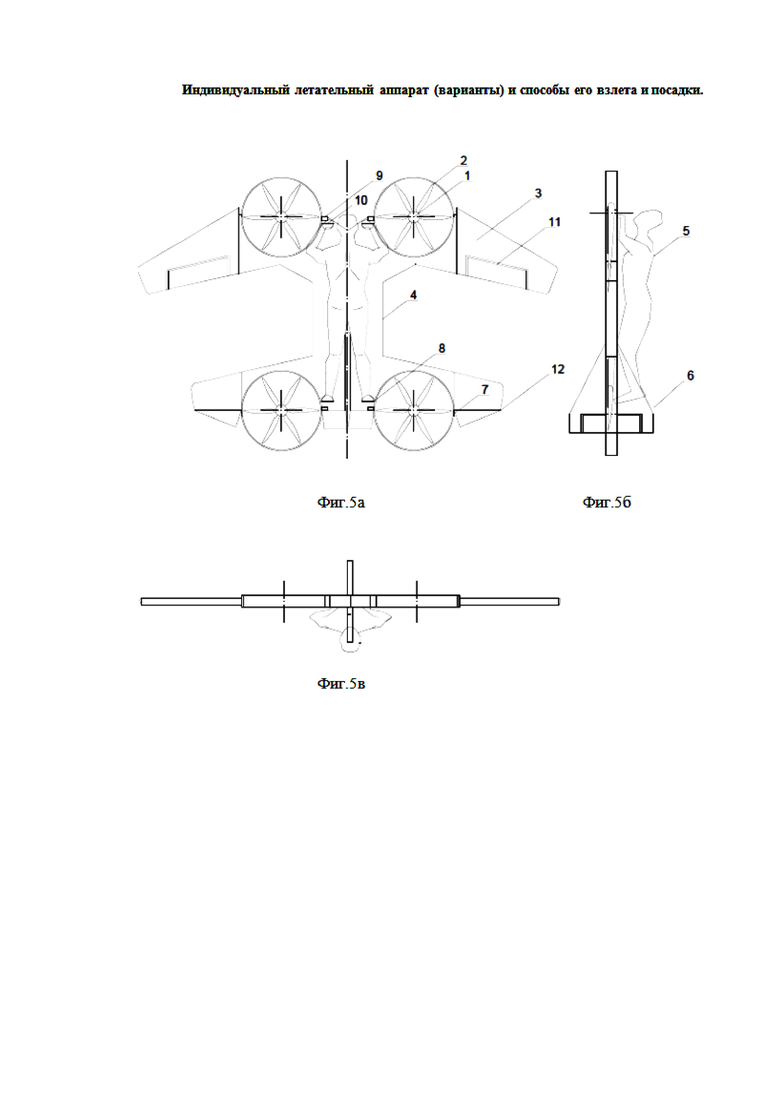
На фиг. 5а-5в показаны чертежи предлагаемого ЛА в горизонтальном положении с четырьмя разложенными раскладными крыльями.
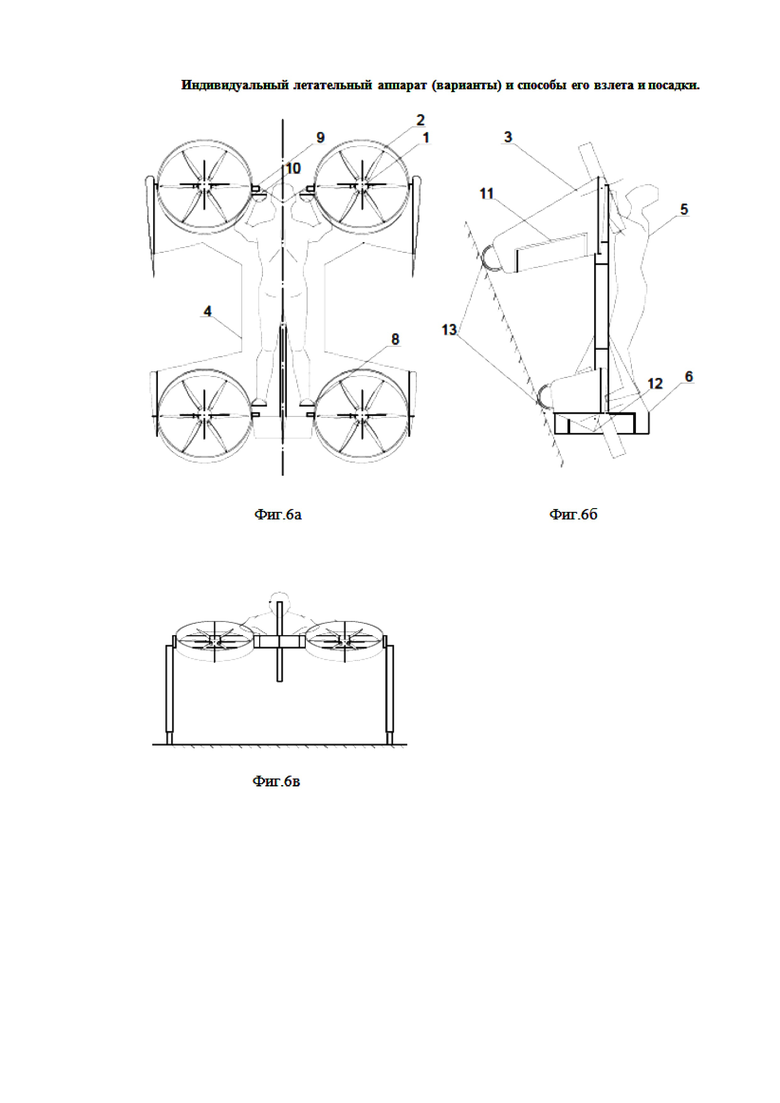
На фиг. 6а-6в показаны чертежи предлагаемого ЛА, стоящего на четырех раскладных крыльях с шасси при вертикальном или горизонтальном взлете.
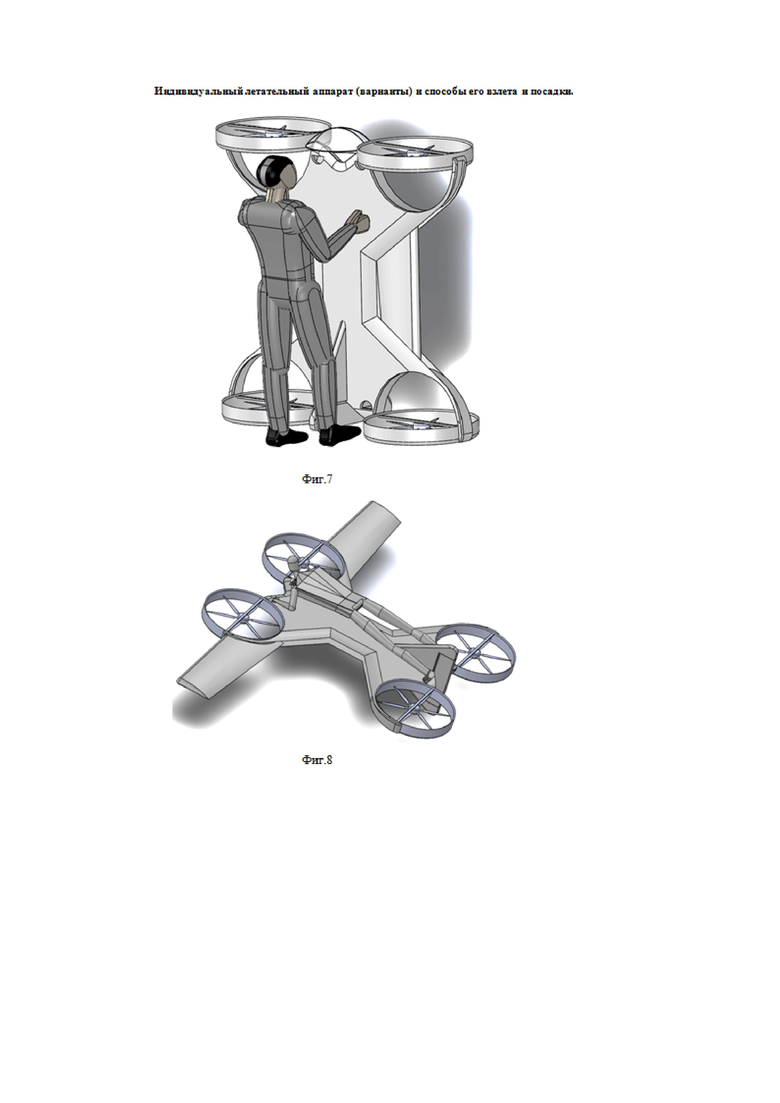
На фиг. 7 изображен принципиальный вид предлагаемого ЛА в вертикальном положении на опорной поверхности для варианта с двумя раздвижными крыльями.
На фиг. 8 изображен принципиальный вид предлагаемого ЛА в горизонтальном положении для варианта с двумя разложенными раздвижными крыльями.
Индивидуальный летательный аппарат представляет собой Х-образный корпус 4, на котором по первому варианту могут быть закреплены на передних концах два раздвижных крыла 3, снабженных закрылками 11 и выполненных с возможностью поворота по оси, перпендикулярной плоскости корпуса 4 в месте их крепления (фиг. 4а). По второму варианту могут быть четыре раскладных крыла 3, закрепленных на передних концах корпуса 4 с закрылками 11 и на задних концах с рулями высоты 12 и выполненных с возможностью раскладываться в плоскость корпуса 4 из положения, перпендикулярного плоскости корпуса 4 (фиг. 5-6). Крылья 3 на задних концах корпуса могут быть выполнены как разной, так и одинаковой длины по сравнению с крыльями 3 на передних концах. В задней части корпуса 4 между двумя силовыми агрегатами находится вертикальный стабилизатор с рулем направления 6. Ручные 10 элементы управления расположены в передней части корпуса 4, ножные 8 элементы управления - в задней части корпуса 4, в качестве таких элементов могут использоваться в зоне рук - джойстики с кнопочными выключателями, а в зоне ног - подвижные платформы педали.
Четыре поворотных силовых агрегата закреплены на концах корпуса 4 так, что силовые агрегаты одной боковой стороны расположены симметрично относительно продольной оси корпуса 4 силовым агрегатам другой боковой стороны, причем каждый силовой агрегат представляет собой двигатель 1 с воздушными винтами 2 в защитном кожухе 7. В качестве двигателей 1 предлагается применять электродвигатели. Силовые агрегаты поворачиваются с помощью мотор-редукторов 9, при этом поворот осуществляется в месте крепления таких агрегатов, так, они могут поворачиваться вокруг оси, перпендикулярной продольной оси корпуса 4 и лежащей в его плоскости.
Все элементы управления, включая электронную, электрическую и механическую части, а также батареи питания предлагается размещать внутри корпуса крыла 4 и крыльев 3. Сам индивидуальный ЛА, в частности его корпус 4 выполнен с возможностью размещения на нем пилота 5 в положении, в котором фронтальная плоскость пилота параллельна плоскости корпуса 4, то есть пилот 5 подходит к ЛА, и ложится на него (опирается всей поверхностью тела), располагаясь на ножных 8 и ручных 10 элементах управления. Изобретение может предусматривать элементы крепления-страховки, такие как ремни безопасности, которые могут быть выполнены в средней части корпуса. Также на корпусе 4 может быть выполнен аэродинамический обтекатель пилота 5 из прозрачного материала (фиг. 7). Кроме того, на концах четырех раскладных крыльев 3 могут быть шасси 13 (фиг. 6а-6в).
Корпус 4 имеет аэродинамическую форму крыла и может представлять собой полую несущую конструкцию из композитных материалов на основе углепластика с интегрированными в него несущими и крепежными элементами, а также элементами поворота силовых агрегатов, механизмов раздвигания или раскладывания крыльев 3, отсеки для электроники управления, элементов питания и спасательного парашюта предлагаемого устройства. Верхняя поверхность корпуса-крыла 4 является анатомической и может иметь специальные углубления и выступы для комфортного размещения пилота 5 на ЛА. Нижняя поверхность является частью всей аэродинамической поверхности устройства, которая вместе с крыльями 3 и силовыми агрегатами создает основную подъемную силу во время полета при горизонтальном положении корпуса 4.
Способ полета индивидуального летательного аппарата из вертикального положения реализуется следующим образом. Пилот 5 подходит к вертикально стоящему на опорной поверхности ЛА (фиг. 1а-1в и 7), иными словами, стоящему перпендикулярно опорной поверхности ЛА, который опирается на вертикальный стабилизатор и задние части корпуса, помещается (ложится) на корпус 4 и запускает поворотные силовые агрегаты. Затем осуществляет вертикальный взлет, силовые агрегаты при этом повернуты параллельно опорной поверхности. Далее путем поворота силовых агрегатов в плоскость корпуса 4 переводит его (корпус 4) из вертикального положения в горизонтальное.
Затем можно осуществлять полет в нескольких режимах: в первом режиме для полета в различных направлениях - маневрировании - используют распределение тяги двигателей 1 и/или изменяемый вектор тяги, то есть маневрируют с помощью изменения скорости вращения каждого двигателя 1 с воздушными винтами 2 и/или изменения положения каждого силового агрегата относительно корпуса 4. Во втором режиме в зависимости от модификации предлагаемого устройства раздвигают два крыла 3 с закрылками 11 или раскладывают четыре крыла 3 с закрылками 11 и рулями высоты 12 и осуществляют полет, маневрируя с помощью руля направления 6, закрылок 11 (для варианта с двумя раздвижными крыльями 3) или закрылок 11 и рулей высоты 12 (для варианта с четырьмя раскладными крыльями 3), вместе с тем, маневрировать можно с помощью изменения скорости вращения каждого двигателя 1 с воздушными винтами 2 и/или изменения положения каждого силового агрегата относительно корпуса 4. В зависимости от желаемого направления полета, используют что-то одно, все вместе или совокупность нескольких вышеперечисленных приспособлений для маневрирования, что очевидно для специалиста в данной области техники.
Все управление ЛА осуществляется посредством ручных 10 и ножных 8 элементов управления.
Посадка индивидуального ЛА осуществляется аналогично взлету, в обратной последовательности действий управления.
Способ полета индивидуального ЛА из горизонтального положения на опорной поверхности, т.е. как было отмечено ранее, положения, при котором ЛА стоит на земле на четырех сложенных раскладных крыльях 3 непосредственно или на шасси, выполненных на их концах, реализуется следующим образом. Пилот подходит к ЛА, ложится на его корпус 4 и запускает силовые агрегаты. Затем осуществляет вертикальный взлет или горизонтальный взлет на шасси по опорной поверхности, при этом поворачивает силовые агрегаты пропорционально образованию подъемной силы и набору скорости.
После взлета можно осуществлять полет в нескольких режимах: в первом режиме для полета в различных направлениях - маневрировании - используют распределение тяги двигателей 1 и/или изменяемый вектор тяги, то есть маневрируют с помощью изменения скорости вращения каждого двигателя 1 с воздушными винтами 2 и/или изменения положения каждого силового агрегата относительно корпуса 4. Во втором режиме раскладывают четыре крыла 3 с закрылками 11 и рулями высоты 12 и осуществляют полет, маневрируя, т.е. изменяя направление полета, с помощью изменения скорости вращения каждого двигателя 1 с воздушными винтами 2 и/или изменения положения каждого силового агрегата относительно корпуса 4, а также с помощью руля направления 6, закрылок 11 и рулей высоты 12. В зависимости от желаемого направления полета, используют что-то одно, все вместе или совокупность нескольких вышеперечисленных приспособлений для маневрирования, что очевидно для специалиста в данной области техники.
Посадка предлагаемого ЛА в данном способе осуществляется аналогично взлету, в обратной последовательности действий управления.
Таким образом, предлагается индивидуальный летательный аппарат вертикального или горизонтального взлета/посадки, что зависит от выбора пилота при модификации устройства с четырьмя раскладными крыльями. На таком аппарате можно осуществлять полет с крыльями и без них, в зависимости от условий полета и желания пилота. В частности в обоих способах, при раздвинутых или разложенных крыльях 3 и достижении определенной горизонтальной скорости силовые агрегаты можно повернуть вертикально, что позволит осуществлять полет по типу самолета (фиг. 3а-3в). Менять направления полета - маневрировать - можно используя распределение тяги двигателей 1, рули направления 6, закрылки 11 или закрылки 11 и рули высоты 12. На земле в вертикальном положении ЛА со сложенными крыльями занимает мало места, за счет чего обеспечивается его компактность.
Работает предлагаемое решение посредством описанных выше способов.
Индивидуальный ЛА может иметь следующие характеристики. Корпус вместе с силовыми агрегатами может иметь длину около 2,4 м, а между осями боковых силовых агрегатов ≈1,7 м. Расстояние между осями силовых агрегатов на передних или задних концах ≈1,15 м. Ширина вместе с разложенными или раздвинутыми крыльями ≈3,7 м, без крыльев ≈1,9 м. Диаметр защитного кожуха силового агрегата ≈0,7 м.
Реализованный вариант ЛА имеет вес с аккумуляторами и без пилота около 100 кг. Тяговооруженность четырех двигателей около 300 кг. Полезная нагрузка (вес пилота с парашютом) составляет около 100 кг. Время полета может составлять от 30 до 60 минут, зависит от режимов полета. Дальность полета в режиме квадрокоптера от 50 до 100 км, в режиме самолета около 300 км. Данные характеристики являются оценочными, не могут и не должны сужать притязаемый объем прав.
Таким образом, создан индивидуальный летательный аппарат, использование которого обеспечивает повышение удобства пользования за счет компактности, более высокие аэродинамические характеристики благодаря уменьшенному лобовому сопротивлению и улучшенной аэродинамической устойчивости, что достигается благодаря форме корпуса, расположению силовых агрегатов и возможности использовать крылья. Также обеспечивается расширение функциональных возможностей ЛА за счет различных вариантов взлета/посадки и режимов полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ - НАЗЕМНО-ВОЗДУШНАЯ АМФИБИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2317220C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2008 |
|
RU2435707C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2003 |
|
RU2244661C2 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2422309C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2662339C2 |
| УНИВЕРСАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2004 |
|
RU2272751C1 |
| АЭРОЛЕТ (ВАРИАНТЫ), ЧАСТИ АЭРОЛЕТА, СПОСОБЫ ИСПОЛЬЗОВАНИЯ АЭРОЛЕТА И ЕГО ЧАСТЕЙ | 2010 |
|
RU2466061C2 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| Беспилотный летательный аппарат | 2023 |
|
RU2812164C1 |
Изобретение относится к области авиации, в частности к конструкциям и способам полета пилотируемых летательных аппаратов (ЛА). Индивидуальный ЛА содержит Х-образный корпус, два раздвижных крыла, снабженных закрылками и закрепленных на передних концах корпуса с возможностью поворота по оси, перпендикулярной плоскости корпуса, или четыре раскладных крыла, закрепленных на передних и задних концах корпуса. Четыре крыла выполнены с возможностью раскладываться в плоскость корпуса из положения, перпендикулярного плоскости корпуса. ЛА содержит вертикальный стабилизатор, ручные и ножные элементы управления, расположенные в передней и задней частях корпуса соответственно. Четыре силовых агрегата выполнены с возможностью поворота и попарно закреплены на концах корпуса. Каждый силовой агрегат представляет собой двигатель с воздушными винтами в защитном кожухе. Корпус выполнен с возможностью размещения на нем пилота в положении, в котором фронтальная плоскость пилота параллельна плоскости корпуса. Обеспечивается повышение аэродинамических характеристик благодаря уменьшению лобового сопротивления. 3 н. и 5 з.п. ф-лы, 8 ил.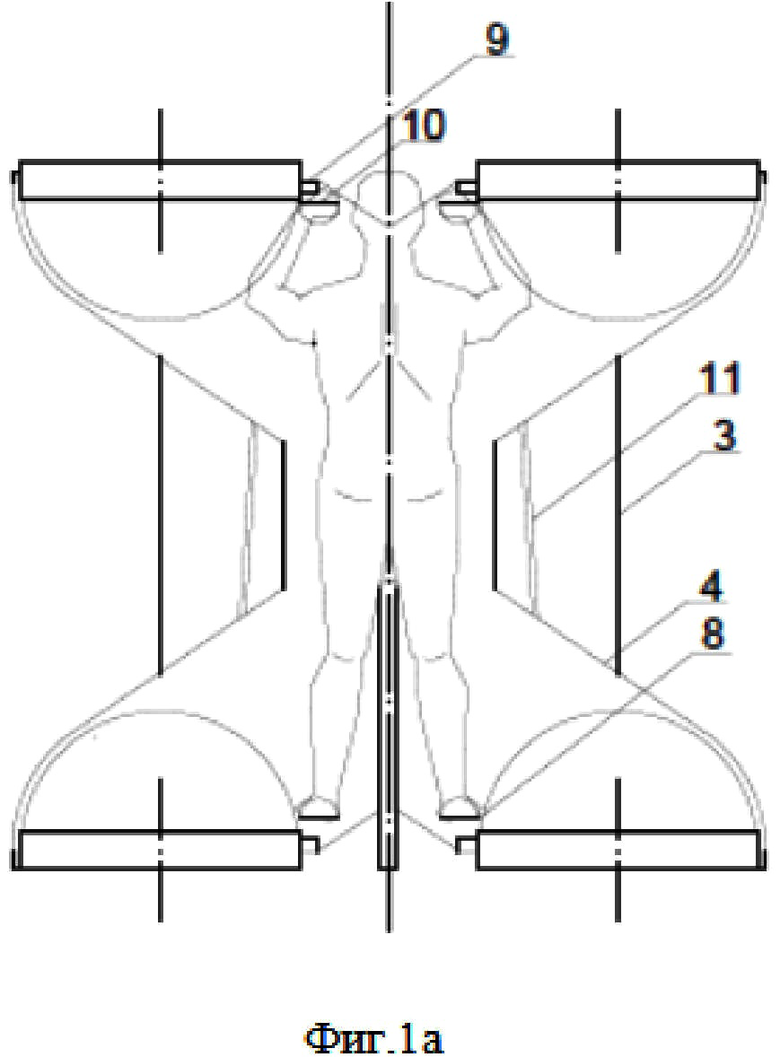
1. Индивидуальный летательный аппарат, содержащий Х-образный корпус (4), два раздвижных крыла (3), снабженных закрылками (11) и закрепленных на передних концах корпуса (4) с возможностью поворота по оси, перпендикулярной плоскости корпуса (4) в месте их крепления, или четыре раскладных крыла (3), закрепленных на передних концах корпуса (4) с закрылками (11) и на задних концах с рулями высоты (12) и выполненных с возможностью раскладываться в плоскость корпуса (4) из положения, перпендикулярного плоскости корпуса (4), вертикальный стабилизатор, снабженный рулем направления (6), ручные (10) и ножные (8) элементы управления, расположенные в передней и задней частях корпуса (4) соответственно, и четыре силовых агрегата, выполненных с возможностью поворота и закрепленных на концах корпуса (4) так, что силовые агрегаты одной боковой стороны расположены симметрично относительно продольной оси корпуса (4) силовым агрегатам другой боковой стороны, причем каждый силовой агрегат представляет собой двигатель (1) с воздушными винтами (2) в защитном кожухе (7), при этом корпус (4) выполнен с возможностью размещения на нем пилота в положении, в котором фронтальная плоскость пилота параллельна плоскости корпуса (4).
2. Летательный аппарат по п. 1, в котором на передней части корпуса (4) выполнен аэродинамический обтекатель пилота.
3. Летательный аппарат по п. 1, в котором корпус (4) снабжен элементами крепления-страховки пилота.
4. Летательный аппарат по п. 1, в котором на концах четырех раскладных крыльев (3) выполнены шасси.
5. Способ полета индивидуального летательного аппарата, включающий вертикальный взлет летательного аппарата, корпус (4) которого располагается вертикально относительно опорной поверхности и выполнен с возможностью размещения на нем пилота в положении, в котором фронтальная плоскость пилота параллельна плоскости корпуса (4), далее путем поворота силовых агрегатов в плоскость корпуса (4) переводят его из вертикального положения в горизонтальное и либо осуществляют полет, маневрируя с помощью изменения скорости вращения каждого двигателя (1) с воздушными винтами (2) силового агрегата и/или изменения положения каждого силового агрегата относительно корпуса (4), либо раздвигают два крыла (3) с закрылками (11) или раскладывают четыре крыла (3) с закрылками (11) и рулями высоты (12) и осуществляют полет, маневрируя с помощью чего-то одного, всей совокупности или сочетания нескольких из нижеследующего: изменения скорости вращения каждого двигателя (1) с воздушными винтами (2), изменения положения каждого силового агрегата относительно корпуса (4), руля направления (6) на вертикальном стабилизаторе, закрылков (11), рулей высоты (12).
6. Способ полета индивидуального летательного аппарата, включающий взлет летательного аппарата, стоящего на опорной поверхности на четырех сложенных раскладных крыльях (3) непосредственно или на шасси, выполненных на их концах, в горизонтальном положении, при этом корпус (4) летательного аппарата выполнен с возможностью размещения на нем пилота в положении, в котором фронтальная плоскость пилота параллельна плоскости корпуса (4), далее либо осуществляют полет, маневрируя с помощью изменения скорости вращения двигателя (1) с воздушными винтами (2) каждого силового агрегата и/или изменения положения каждого силового агрегата относительно корпуса (4), либо раскладывают крылья (3) с закрылками (11) и рулями высоты (12) и осуществляют полет, маневрируя с помощью чего-то одного, всей совокупности или сочетания нескольких из нижеследующего: изменения скорости вращения каждого двигателя (1) с воздушными винтами (2), изменения положения каждого силового агрегата относительно корпуса (4), руля направления (6) на вертикальном стабилизаторе, закрылков (11), рулей высоты (12).
7. Способ по п. 6, в котором осуществляют вертикальный взлет.
8. Способ по п. 6, в котором осуществляют горизонтальный взлет.
| US 20030080242 A1, 01.05.2003 | |||
| Жезловой аппарат | 1928 |
|
SU12396A1 |
| US 20030094537 A1, 22.05.2003 | |||
| US 20160311530 A1, 27.10.2016 | |||
| US 20160144957 A1, 26.05.2016. | |||

