1. Способ подготовки дистанционных боевых действий заключается:
1) В массовом и дешевом изготовлении и использовании летательных аппаратов, разной стреловидности, в том числе и вертикального взлета и посадки, баллистических, противотанковых и крылатых ракет с отделяемыми планирующими боевыми частями, управляемыми бомбами с высоким аэродинамическим качеством, моно и многопланов с крыльями изменяемой стреловидности с килями на концах крыльев, коробчатого типа крыльев, БПЛА – разведчиков, бомбардировщиков, перехватчиков, транспортных, барражирующих боеприпасов,
боевых частей для средств поражения, гранат для гранатомета, реактивных снарядов, мин для минометов, артиллерийских снарядов….
2) В размещении системы радиотехнических модулей вокруг территории вероятного противника, которые шарами воздушных модулей поднимают на большую высоту основными тросами;
в сборе и обработке информации на командных пунктах, полученные от БПЛА разведчиков, радиотехнических модулей, спутниковых систем;
в управлении радиотехническими модулями различными видами БПЛА и организации взаимодействия войск; в постановке активных радиопомех, в том числе и в автоматическом режиме в тактической и стратегической глубине обороны противника;
в использовании радиотехнических типов модулей с узконаправленными антеннами: Радиопеленгаторного, пеленгаторного пассивного действия, радионавигационного, связного ретрансляционного, целенаведения для БПЛА и наземных войск, постановщиков активных помех, а также метеорологического, инфракрасного, и
визуального наблюдения.
2. Уровень техники
Война это не только боевые действия, но и война экономических потенциалов и технологий. Технологии определяют «коэффициенты полезного действия используемых экономических потенциалов». Чья технология разведки, преодоления ПВО и поражения целей окажется эффективнее и дешевле, тот и получает в этом роде войск преимущество. Предлагаемая концепция, технологии позволяют на год или два получить значительные преимущества в производстве вооружений, в преодолении ПВО, поражении наземных, надводных и воздушных целей в тактической и стратегической глубине обороны противника, повысить коэффициент полезного действия.
Известны:
1) Заметная авиастроительная тенденция к строительству летательных аппаратов, интегральной аэродинамической компоновки, где фюзеляж создает значительную подъемную силу. Следующий шаг развития авиации это будет применение Летающего крыла с изменяемой геометрией, бипланов, трипланов. Многие производители уже используют «Летающее крыло». В интернете имеется видео (см.Л.10), подобная испытанная успешная концепция летающего крыла взята за основу, переработана и применена в предлагаемой концепции, как наиболее перспективная, хотя и классическая, тандемная и схема «утка» летательных аппаратов вполне могут быть хотя и частично применимы в этой концепции.
2) Много самолетов с изменяемой стреловидности крыла, вынуждены использовать гидравлическую, тяжелую и дорогую систему изменения стреловидности крыла.
Предлагаемая концепция будет изменять стреловидность крыльев за счет полностью поворотных 2 рулей направления или 2 килевых устройств, и набегающего скоростного напора воздуха, что уменьшит вес конструкции; будет компактна в транспортном положении и на хранении.
3) Применение в самолетостроении двух типов конструкции летательных аппаратов монокок, усиленный монокок и полумонокок, лонжеронного или стрингерного типа. В наземном строительстве применяется силовой монолитный железобетон, где вместо металлической, уже применяется композитная арматура из стекловолокна. Предлагаемая концепция для постройки летательных аппаратов соединяет эти технологии, используя взрывчатое вещество (Л4,5,6), или твердеющие композиционные материалы, как связующее для неметаллической обрешетки.
4) У БПЛА Ланцет-3 весом 12 кг боевая часть всего 3 кг, или 25% веса. (Л.6). Предложенная технология позволит изменить это соотношение в пользу боевой нагрузки. Можно заменить осколочное поражение металлическими осколками, или кумулятивных зарядов, кратным усилением фугасного, зажигательного или объемно-детонирующего заряда. Так поражение танка кумулятивным зарядом не всегда вызывает его вывод из строя и детонацию боезапаса, оставляя его ремонто-пригодным. В то время как поражение усиленным и дешевым фугасным зарядом, поднимет вероятность детонации боезапаса в разы, несмотря на его активную защиту. В предложенной концепции летательных аппаратов одноразового использования, конструкция обшивки фюзеляжа и крыльев, лонжеронов и других силовых элементов станет монолитной армированной, где усилия на сжатие, растяжение, кручение и изгиб будет принимать застывшее связующее армированное взрывчатое вещество, по аналогии с монолитным железобетоном, «монолитная технология изготовления».
5) Патент № 1841147А1 от 1967 года (см Л.4) Взрывчатый сплав «ВТО-5» с удельной плотностью 1,7 гр/см3, получил прочность на сжатие 500 кГс/см2 для детали в 9см2, что несколько выше прочности марочного бетона М50. Использование в самолетостроении «монолитной технологии» возможно.
6) Турецкие Барактары летают на малых высотах, имеют радиолокационную, визуальную, инфракрасную, звуковую заметность. Слабые возможности при преодолении зон с сильной ПВО, обуславливают их боевые потери, как следствие большие финансовые потери, до 5 млн долларов за сбитый. Предложенная концепция предлагает способы уменьшения упомянутых заметностей летательных аппаратов, что снизит их боевые потери при разведке и поражении целей противника.
7) Способы уменьшения изгибающих моментов, действующих на крыло. Предлагаема концепция производства летательных аппаратов «Летающее крыло» позволяет перераспределять нагрузки по размаху крыла с целью значительного уменьшения изгибающих моментов в полете.
8) Современные двигатели для реактивных снарядов, пороховые ускорители, различного типа головки наведения, инерциальные системы навигации, автопилоты, пусковые системы реактивных снарядов, различные ПЗРК вполне могут быть применимы в предложенной концепции. Можно взять готовые, испытанные конструкторские решения для применения в указанной технологии. Недорогой «универсальный реактивный двигатель» RU 2 754 976 C2 от 23.12.2019.
9) Самолеты ДРЛО на больших высотах имеют огромные зоны радиолокационного контроля, но они дороги в производстве, уязвимы, им периодически требуется дозаправка и смена экипажей, затраты на обслуживание, плановый ремонт.
10) Использование отдельных РЛС на аэростатах весьма проблематично из-за утяжеления веса за счет используемого троса. Поэтому лучшие образцы аэростатов достигли пока высоты в 5км. Аэростатные комплексы «Пересвет», «Макс»,
https://armstrade.org/includes/periodics/news/2010/1119/16006414/detail.shtml аэростат «Тигр», объемом около 3000 куб.м., был разработан и произведен ЗАО «Воздухоплавательный центр «Авгуръ». ВЦ «Авгуръ» серийно производит несколько типов привязных аэростатов малого объема, разработаны несколько модификаций аэростатов среднего объема «Гепард» для подъема оборудования весом до 300 кг на высоту до 1500 м, а также самый большой в РФ привязной аэростатический комплекс «Пума» объемом 12 тыс. куб.м для подъема свыше 2 т оборудования на высоту более 3 км.
В предлагаемой концепции предполагаемая высота подъема не менее 10000 метров, за счет перераспределения нагрузок, чередованием воздушных и радиотехнических модулей закрепленных на одном тросе, что значительно снизит нагрузки на трос и силовые элементы модулей, увеличит диапазон эксплуатационных высот и скорости ветра.
11) Узконаправленные антенны давно применяются. Новейшие антенны могут быть вполне применимы в радиотехнических модулях предложенной концепции. Известен патент RU201664 U1 от 28.12.2020 года «Узконаправленная волновая антенна радиолокационной системы обзора», где установлено, что в диапазоне частот 9000-9450МГц, диаграмма направленности этой антенны будет по ширине 0,35 градуса в горизонтальной плоскости и 11 градусов в вертикальной плоскости. Такие антенны на больших высотах обеспечат необходимые: Дальность, избирательность, скрытность, помехозащищенность в работе. (См.Л18)
12) Летательные аппараты вертикального взлета и посадки, прототипы:
a) US 5289994 A (DEL CAMPO AGUILERA JUAN), 01.03.1994 схема утка, имеет несущий винти пропеллер, аппарат перекоса винтов. Рули управления будут работать только после разгона скорости.
b) CN 105984584 A (LIU XINGUANG), 05.10.2016 имеет фюзеляж типа ракеты с коробчатыми 4 крыльями, соединенных с ромбовидными килями пропеллеры малого удлинения.
c) US 2712420 A (NORTHROP AIRCRAFT INC), 05.07.1955 нормальная аэродинамическая фюзеляжная схема. Двигатель впереди и сзади фюзеляжа, элевоны, руль высоты будут эффективны только на скорости. Диаметр винтов меньше размаха крыльев.
d) CN 111976954 A (YANG KE), 24.11.2020 2 соосных пропеллера малого диаметра, 8 рулей сзади. Фюзеляж.
e) CN 102897319 A (YANG KE), 24.11.2020 Самолет нормальной схемы с 2 соосными винтами малого удлинения.
Их общие недостатки по сравнению с предлагаемой концепцией (фиг.24, 28,30-32):
a) Наличие фюзеляжа снизит аэродинамическое качество, создаст высокое расположение центра тяжести во взлетно-посадочном положении, а малая площадь опоры определят плохую устойчивость на взлете и посадке. Увеличение размеров хвостового оперения для обеспечения устойчивости такой схемы увеличит вес летательного аппарата.
b) Малые диаметры винтов, уменьшат КПД двигателей за счет малых удлинений винтов, обтекание скоростными потоками фюзеляжа создаст дополнительное сопротивление, турбулентность, снижение эффективности задних рулей управления, потребуется больший избыток мощности для взлета и посадки, большие площади рулей управления на взлете и посадке.
c) Использование большого несущего винта и соосного с ним малого пропеллера снизит КПД винта. (US 5289994 A) Вертолетный автомат перекоса повысит управляемость, но утяжелит, усложнит конструкцию.
Предлагаемая концепция (фиг.24, 28,30-32), преимущественно без фюзеляжа с опорами на килях и концах крыльев, обеспечит большую площадь опоры. Использование многопланов фиксированной стреловидности усилит продольную устойчивость на земле при взлете и посадке. Винты и крылья большого удлинения, с диаметром большим, чем размах крыла, повысят КПД винтов и аэродинамическое качество, обеспечат высокие скоростные потоки воздуха на концах крыльев в зоне рулей управления летательным аппаратом (элевонов, руля направления и киля), что увеличит их управляемость, и в тоже время уменьшат потоки воздуха в центральной части аппарата летательного. На малых скоростях полета эффективность этих рулей управления будет низкой, поэтому потребуются большие углы отклонения рулей, а по мере разгона скорости эффективность их увеличится в разы, потребуется дифференцированное управление (п.6 Формулы). Для БПЛА есть возможность не использовать автомат перекоса винтов и механизм изменяемого шага винта.
3. Краткое описание рисунков и способа эксплуатации.
1) Фигуры.
Лист 1. Планер летательного аппарата и элементы фюзеляжа с их силовыми элементами, как вариант «монолитной технологии» изготовления.
Фиг.1 Планер управляемой бомбы в форме летающего крыла изготовленной по монолитной технологии с фиксированной стреловидностью крыла.
Фиг.1а Вид крыла планера в разрезе.
Фиг.2. Часть фюзеляжа изготовленной по монолитной технологии.
Фиг.2а Вид фюзеляжа в разрезе.
Лист 2. Способ применения крылатой ракеты с 2 разделяющимися боевыми частями, управляемая авиабомба.
Фиг.3. Первый этап. Размещение крылатой ракеты на наземном стартовом устройстве с 2-мя отделяющимися боевыми частями. Крылья с малыми углами стреловидности для достижения максимальной дальности полета. Угол набора высоты определен скоростными ограничениями, нагревом конструкции, условиями достижения заданной дальности полетов. Крылья боевых частей управляют полетом крылатой ракеты. Перед отделением боевых частей, их крылья увеличивают стреловидность в целях обеспечения их устойчивости и управляемости в дальнейшем полете. Первый этап полета до полной выработки топлива ракетными двигателями. (П.3,4 Формулы.)
Фиг.4. Второй этап. После отработки двигателей на планировании. Сброс передней боевой частью ракеты носителя. Оставшийся ракетоноситель перейдет на пикирующую траекторию, уводя от столкновения с задней боевой частью. Через заданное время задняя боевая часть сбрасывает ракетоноситель. Боевые части разнесенные по высоте, переходят на режим планирования к заданной цели на экономичных режимах. (П.3,4 Формулы.)
Фиг.5. Третий этап. В заданной точке боевые части складывают крылья, (увеличивают стреловидность крыльев и запас устойчивости по перегрузке) и с разгоном скорости пикируют на цель для ее поражения, сокращая время нахождения в зоне сильного ПВО и заметность боевых частей. (П.3,4 Формулы.)
Фиг.6. Вариант управляемой авиационной бомбы со сложенными крыльями с разными углами стреловидности по передней кромке крыла. Используется при транспортировке, при креплении на внешней подвеске самолета или расположения в бомболюке.
Фиг.7. Управляемая авиационная бомба с разными углами стреловидности по передней кромке крыла на планировании и пикировании на цель.
Лист 3. Крылатая ракета с одной отделяемой боевой частью, биплана с фиксированными углами стреловидности, с разными углами стреловидности по передней кромке крыла.
Фиг.8. Боевая часть крылатой ракеты в виде «Летающего крыла, биплана» наземного базирования. Вид сзади.
Фиг.9. Крылатая ракета с одной отделяемой боевой частью в режиме набора высоты. Вид сверху.
Фиг.10. Условное изображение отделяемого ракетоносителя крылатой ракеты. Вид с боку.
Лист 4. Способ изменения стреловидности крыла на примере управляемой авиационной бомбы, моноплана с тремя разными углами стреловидности по передней кромке крыла. Схемы действующих сил изменения стреловидности крыла за счет скоростного напора.
Фиг.11. Управляемая авиационная бомба со сложенными крыльями после отделения от бомбардировщика.
Фиг.12. Управляемая авиационная бомба с раскрытыми крыльями в режиме планирования.
Фиг.13. Пикирование на цель на боевом курсе с увеличенными углом стреловидности и продольным запасом устойчивости по углу атаки.
Лист 5. Изображение варианта палубного авианосного самолета-разведчика биплана с крыльями, изменяемой стреловидности, с разными углами стреловидности по передней кромке крыла с турбореактивным двигателем для взлета по самолетному.
Фиг.14. Палубный самолет-разведчик с убранными крыльями, на хранении, и при транспортировке. Вид с верху.
Фиг.15. Вид с боку палубного самолета-разведчика с убранными крыльями, на хранении с дополнительной транспортной тележкой в хвостовой части.
Фиг.16. Взлет и полет с малыми углами стреловидности. Вид сверху.
Фиг.17. Взлет и полет с малыми углами стреловидности. Вид с боку.
Фиг.18. Полет с увеличенными углами стреловидности. Вид сверху.
Фиг.19. Полет с увеличенными углами стреловидности. Вид с боку.
Лист 6. Изображение самолета, (БПЛА), моноплана интегральной схемы вертикального взлета и посадки, с крыльями, изменяемой стреловидности, с разными углами стреловидности по передней кромке крыла, с турбореактивным двигателем.
Фиг.20. Взлетное положение самолета, (БПЛА) с малыми углами стреловидности. Вид сзади.
Фиг.21. Взлет и полет самолета, (БПЛА) с малыми углами стреловидности и с изменяемым вектором тяги двигателя. Вид сверху.
Фиг.22. Полет самолета, (БПЛА) с большими углами стреловидности. Вид сверху.
Фиг.23. Вид сверху палубного самолета-разведчика с убранными крыльями на хранении или в транспортном положении. Вид сверху.
Лист 7. Варианты БПЛА и самолета, биплана, триплана с фиксированными углами стреловидности.
Фиг. 24. БПЛА, триплан вертикального взлета и посадки с жестким соосным винтом. Может использоваться, как БПЛА тактический разведчик, бомбардировщик.
Фиг.25. Самолет, биплан с крыльями коробчатого типа, с фиксированной или изменяемой стреловидностью крыла, с турбореактивным двигателем на взлете с изменяемым вектором тяги двигателя, позволяющим взлетать по вертолетному и самолетному.
Фиг.26. БПЛА, биплан, с двумя реактивными двигателями с крылом фиксированной стреловидности вид спереди.
Фиг.27. БПЛА, биплан, вид сверху, с двумя реактивными двигателями. Крылья с разными углами стреловидности по передней кромке.
Лист.8. Варианты летательных аппаратов, БПЛА, «Летающее крыло», бипланов, трипланов с соосными и обычными винтами.
Фиг.28. Триплан, «Летающее крыло» вертикального взлета и посадки. Объемное изображение. Неподвижное килевое устройство установлено под углом к вертикали.
Фиг.29. Триплан, «Летающее крыло» на взлете по самолетному с одновинтовым двигателем. Неподвижное килевое устройство установлено под углом к вертикали. Вид сзади.
Фиг.30. Триплан, «Летающее крыло» на взлете по вертолетному с соосными винтами. Неподвижное килевое устройство установлено под углом к вертикали. Вид сбоку.
Фиг.31. Биплан, «Летающее крыло» вертикального взлета и посадки вертикального взлета и посадки. Неподвижное килевое устройство установлено вертикально в горизонтальном полете. Вид сзади.
Фиг.32. Биплан, «Летающее крыло» вертикального взлета и посадки на взлете. Неподвижное килевое устройство установлено вертикально. Вид сбоку.
Лист 9. Вариант БПЛА, биплана с крыльями изменяемой стреловидности крыльев.
Фиг.33. БПЛА, биплан с крыльями изменяемой стреловидности крыльев, коробчатого типа, реактивный двигатель. Объемное изображение.
Фиг.34. БПЛА биплана с крыльями изменяемой стреловидности крыльев, реактивный двигатель. Вид с верху.
Лист.10. Вариант примерной схемы работы системы синхронизации изменения стреловидности крыльев с 4–осными узлами вращения летательных аппаратов, использующего шестеренчатый способ синхронизации изменения стреловидности крыльев, электрические приводы киля и руля направления для изменения стреловидности крыльев силой набегающего скоростного напора воздуха. (П.3 Формулы.)
Фиг.35. Вид сверху на систему изменения и стабилизации углов стреловидности крыльев с 4–осными узлами вращения летательных аппаратов шестеренчатого типа. При повороте киля, руля направления возникают аэродинамические силы и крутящие моменты для поворота крыльев.
Фиг.36. Шестеренчатый узел механизма синхронизации изменения стреловидности крыльев в разрезе.
Лист.11. Вариант примерной схемы работы системы синхронизации изменения стреловидности крыльев с 2-осными узлами вращения крыльев летательных аппаратов, использующего зубчатые ремни и тяги, привод руля направления для изменения положения поворотного киля и стреловидности крыла скоростным напором набегающего потока. (П.3 Формулы.)
Фиг.37. Вид сверху на вариант системы изменения и стабилизации углов стреловидности крыльев с 2–осными узлами вращения летательных аппаратов, использующего ременно-тяговую систему синхронизации, привод руля направления для изменения положения поворотного киля и стреловидности, силой скоростного напора набегающего потока воздуха. Этап раскрытия крыльев, уменьшение угла стреловидности передних крыльев и отрицательной стреловидности задних крыльев крылатой ракеты при воздушном пуске.
Фиг.38. Стартовое, транспортное положение самолетной крылатой ракеты
Фиг.39. Этап начала раскрытия крыльев. В начале этапа поворот крыльев осуществляется за счет силы сопротивления воздуха при флюгерном режиме руля направления и киля. После смещения бокового фокуса за центр тяжести,(поворота крыльев до заданного угла стреловидности, руль направления переводится в управляемый режим, обеспечивая создание аэродинамических сил на поворотном киле.
Фиг.40. Этап набора высоты, планирования на прямом крыле крылатой ракеты.
Фиг.41. Этап пикирования на цель крылатой ракетой.
Лист 12 Вариант схемы работы системы синхронизации изменения стреловидности крыльев с 2–осными узлами вращения летательного аппарата использующего только электрический привод руля направления, тяги механизма синхронизации, для изменения положения поворотного киля и стреловидности силой скоростного напора набегающего потока воздуха. (П.3 Формулы.)
Фиг.42. Вариант схемы работы системы синхронизации изменения стреловидности крыльев с 2–осными узлами вращения летательного аппарата. Этап разгона и набора высоты крылатой ракеты воздушного пуска.
Лист 13. Способ размещения стандартных по весу и подъемным силам модулей радиотехнических и шаров воздушных модулей. Подъемная сила каждого шара уравновешивает силу тяжести участка троса до следующего воздушного шара.
Фиг.43. Рисунок способа распределения нагрузки на основной трос по участкам.
Фиг.41. Способ поочередного крепления модулей радиотехнических и воздушного шара на основном тросе, когда подъемной силы шара воздушного модуля хватает для подъема веса своего участка (50).
Лист 14. Варианты стабилизации положения радиотехнических модулей и крепления модулей к основному тросу.
Фиг.44. Вариант крепления шара воздушного модуля с одной оболочкой.
Фиг.45. Вариант стабилизации радиотехнического модуля обзорной радиопеленгации с сферическими, фазированными, и другими антеннами с помощью червячного и шестеренчатых механизмов.
Фиг.46. Вариант крепления шара воздушного модуля с двумя оболочками.
Фиг.47. Вариант стабилизации радиотехнического модуля обзорной радиопеленгации с различными типами антенн, с помощью тросовых, ременных блоков.
Фиг.48. Вид с верху в разрезе на радиотехнического модуля обзорной радиопеленгации с различными антеннами.
Лист 15. Вариант электродвигателя для соосных винтов летательных аппаратов.
Фиг.49. Рисунок механической части варианта исполнения электродвигателя для соосных винтов летательных аппаратов.
Фиг.50. Рисунок электрической блок-схемы электродвигателя для соосных винтов летательных аппаратов.
Лист 15. Летательный аппарат моноплан с сооссными винтами вертикального взлета и посадки.
Фиг.51. Летательный аппарат моноплан с сооссными винтами при заходе на посадку, посадке и взлете.
Фиг.52. Летательный аппарат моноплан на висении в условиях обдува скоростным напором воздуха (q) от винтов. Схема расположения эпюр (q) на висении. Вид сзади.
2) Обозначение отдельных частей на рисунках.
(1). Арматурная обрешетка крыльев летательного аппарата изготовленная из композиционных материалов.
(2). Нервюры крыла
(3). Взрывчатое или композиционное вещество, используемое, как связующее монолитно армированном крыле. Для облегчения конструкции допустимы внутренние пустоты.
(4). Элевоны с электрическим, гидравлическим приводом.
(5). Килевые неподвижные устройства, установленные вертикально или под углом, выполняют функции загнутой законцовки крыла. Угол наклона устройства, площадь руля направления выбирается из условий обеспечения устойчивости и управляемости.
(5а) Килевые полностью поворотные устройства. установленные вертикально или под углом, выполняют функции загнутой законцовки крыла, киля с рулем направления, могут создавать крутящие моменты для изменения стреловидности крыла. Кили и рули поворота имеют по 3 режима работы:
1) Флюгерный для киля, и для рулей направления при необходимости, когда кили, сами ориентируется по ветру, осуществляя свободные повороты вокруг своих осей вращения.
2) Фиксированный для киля, и для рулей направления при необходимости, стопорятся по достижению заданного угла поворота. Так в летательных аппаратах с фиксированной стреловидностью крыла киль будет в фиксированном, а руль направления в управляемом режиме.
3) Управляемый для киля, и для рулей направления, если они осуществляет свои повороты за счет механического привода.
(6). Рули направления. Так же может иметь аналогичных 3 режима работы.
(7). Условное изображение арматурной обрешетки фюзеляжа летательного аппарата изготовленная из композиционных материалов.
(8). Пустота, оставленная для облегчения, или для заполнения горючими смесями для объемно-детонирующих и зажигательных зарядов. Используется по мере необходимости.
(9). Лонжерон из дерева, фанеры, или из взрывчатых, композиционных материалов с неметаллической арматурой.
(10). Жесткая направляющая втулка, задает направление движения тяг.
(10а) Шестеренчатые узлы. Состоят из шестеренок, ригеля и тяг. Синхронизируют угловые скорости и повороты крыльев, передают усилия на узлы их поворотов.
(10б) Тормозной механизм фиксирует заданные углы стреловидности крыла.
(10в) Датчик угла стреловидности крыльев.
(11). Условное изображение фюзеляжа летательного аппарата (крылатой ракеты, БПЛА барражирующего боеприпаса или управляемой авиабомбы).
(12). Ось вращения крыльев.
(12а) Оси вращения крыльев с 4-осными узлами вращения крыльев. Ременно-тяговая система синхронизации (Фиг.37).
(12б) Ригель, передает усилия на шестеренчатые механизмы.
(13). Крылья изменяемой стреловидности могут иметь 3 режима работы:
1) Флюгерный, когда узлы поворота крыльев не застопорены тормозным механизмом.
2) Фиксированный, когда узлы поворота крыльев застопорены тормозным механизмом (10б)
3) Управляемый, когда изменяют стреловидность крыла с помощью механического силового устройства.
(14). Система тяг и рычагов передает усилия для синхронизации изменения, и фиксации заданных углов стреловидности крыльев.
(15). Полностью поворотный киль и руль направления с электромоторами и тормозными механизмами.
(16). Кабина самолета интегральной компоновки.
(17). Дополнительная наземная тележка для транспортировки летательного аппарата со сложенными крыльями.
(18). Неподвижная часть крыла. На ней крепятся двигатели, поворотные устройства крыльев.
(19). Реактивный, ракетный, ТРД, поршневой, электрический винтовой двигатель.
(19а). Двигатель с соосными винтами.
(19б). Сопло двигателя с отклоняемым вектором тяги.
(20). Крыльевая стойка, соединяет крылья в передней части, образует с килевыми устройствами силовой треугольник крепления крыльев. Служит креплением для двигателей или ракетоносителей.
(21). Верхнее крыло триплана.
(22). Среднее крыло триплана.
(23). Нижнее крыло триплана.
(24). Опорные стойки летательных аппаратов вертикального взлета и посадки.
(25). Шасси.
(26). Основной трос, и его ненагруженная часть основного троса, закрепленная на модуле, исключающая трение с ним. Прочностные характеристики троса должны возрастать по мере приближения его к точке крепления (48) на земле из-за усиления суммарной ветровой нагрузки.
(27). Внутренний трос в защитном воздухонепраницаемом чехле, расположенный по оси симметрии модуля воздушного шара, проходящий через его соски на полюсах.
(28). Соски на полюсе модуля воздушного шара с внутренним тросом в чехле. Соединение герметизировано хомутами.
(29). Сосок модуля воздушного шара, предназначенный для заполнения и откачки гелия.
(30). Внешняя оболочка модуля воздушного шара.
(30а) Внутренняя оболочка модуля воздушного шара.
(31). Условное изображение узла крепления модуля воздушного шара к основному тросу.
(32). Быстросъемный хомут крепления основного троса к узлу крепления.
(33). Узел крепления оси вращения червячной передачи с электрическим приводом.
(34). Модуль вращающихся соосных антенн пеленгатора, расположения радиосвязного, радионавигационного и других модулей..
(35). Верхний каскад антенн пеленгатора.
(36). Нижний каскад антенн пеленгатора.
(37). Шестерня для поворота механизма поворота антенн по углу крена.
(38). Электродвигатель с понижающим редуктором, осуществляющих привод поворота механизма положения антенн по крену.
(39). Ползунок червячного механизма с тросом модуля пеленгатора. Изменяет угол тангажа.
(40). Трос модуля пеленгатора, передает усилия через узел крепления основному тросу.
(41). Перегородка разделяющая верхний и нижний каскады антенн пеленгатора.
(42). Фокус каскада параболической антенны. Место расположения излучающей и принимающей антенны, отражателя радиоволн.
(43). Ось вращения соосных антенн пеленгатора.
(44). Двигатель для вращения соосных антенн пеленгатора. Располагается в нижней части модуля для понижения центровки центра масс в целях улучшения управляемости по крену и тангажу модуля.
(45). Излучающая антенна для активного режима пеленгации.
(46). Внешняя оболочка антенного модуля.
(47). Система тросовых управляющих блоков по тангажу и крену радиотехнического модуля.
(48). Ось вращения антенных систем.
(49). Наземный модуль включает в себя лебедку, баллон с гелием, компрессор, вспомогательное поведение.
(50). Условные участки основного троса. На каждом из участков подъемная сила каждого шара воздушного модуля должны компенсировать их общую весовую нагрузку на этом участке. Стрелками указаны условные границы распределения нагрузок.
(51). Корпус электродвигателя разборный, с закрепленным статором, имеет отверстия для охлаждения.
(51а) Обмотка статора генератора переменного и постоянного тока. Полюса (N-S) имеют четное число и меняют поочередно полярность за счет изменения направления своих обмоток.
(52). Первый внутренний ротор, имеет отверстия для охлаждения.
(52а) Сердечники с обмоткой генератора постоянного тока первого ротора.
(52б) Полюса, сердечники с обмоткой возбуждения первого ротора, могут заменяться мощными магнитами.
(52с) Передний винт первого ротора, жесткого типа.
(53). Второй внешний ротор, имеет лопасти вентилятора и отверстия для охлаждения. Разборный.
(53а) Сердечники с обмоткой генератора переменного тока второго ротора.
(53б) Полюса, сердечники с обмоткой второго ротора.
(53с) Задний винт второго ротора, жесткого типа.
(54). Аккумулятор, проводка, выключатели, реостаты.
(55). Подшипники качения, опорные.
(56). Пружина на растяжение. Пружина через подшипник соединяет оси вращения лопастей (52с) и (53с).
(57). Механизм уменьшения биений лопастей. Состоит из шайбы, втулки связанная с осью шага винта (53с), за шайбу зацеплена пружину (56).
(58). Подвесной модуль, санитарного, аварийно-спасательного, транспортного типа. Подвешивается с близким расположением центров тяжести модуля и летательного аппарата.
(59). Снижение по глиссаде аппарата вертикального взлета и посадки с соосными винтами.
(60). Начало выравнивания аппарата вертикального взлета и посадки с соосными винтами.
(61). Конец выравнивания аппарата, выдерживание с гашением горизонтальной скорости, посадка вертикального взлета и посадки с соосными винтами.
Высота выравнивания аппарата может быть от 1 до 10- метров в зависимости от условий.
(62). Взлет, разгон скорости аппарата вертикального взлета и посадки с уменьшением угла тангажа.
(63). Горизонтальный полет аппарата.
(64). Условное изображение загнутых вперед законцовок винтов, лопастей, создающих тягу двигателя. Их размер и угол изгиба выбирается из конкретных условий эксплуатации летательного аппарата.
4) Символы:
F – Точка положения фокуса летательного аппарата при данном угле стреловидности крыльев.
ЦТ - Точка положения центра масс летательного аппарата при данном угле стреловидности крыльев.
Y - подъемная сила самолета, воздушного шара.
R - Сила реакции троса.
Rx - Проекция силы R на ось Х.
Ry - Проекция силы R на ось У.
Хв - Сила трения от ветра на высотах.
Zво - боковая сила от вертикального оперения.
Q - Угол тангажа радио-технических и воздушных модулей, угол снижения летательных аппаратов на глиссаде.
V - Вектор скоростного напора.
G - Вектор силы тяжести.
Рдв - Вектор тяги двигателя.
g - Векторное изображение скоростных потоков от винтов, от реактивного двигателя.
Мкр - различные крутящие моменты крыльев, килей, вертикального оперения.
а, б – Плечи поворота синхронизатора изменения стреловидности крыльев летательного аппарата, которые определяют соотношение углов поворота и усилий между передними и задними крыльями.
N, S - Магнитные полюса образованные обмоткой статора генератора.
Iя1, Iя2, Iг - Постоянные и переменные токи двух якорей электродвигателя, генератора.
U - + Напряжение постоянного тока, источника электроэнергии, аккумулятора.
Я1,Я2 - Якоря роторов.
4. Способ применения.
A. Преодоление ПВО обеспечением малозаметности и сокращения времени нахождения в зоне поражения средств ПВО:
1) От радиолокационного обнаружения:
Цитата из Л2: «ЭПР можно снизить разными способами, общий смысл которых заключается в том, чтобы затруднить возврат волны на радиолокационную станцию. Для этого волна должна либо совсем рассеяться, либо поглотиться поверхностью, либо кардинально изменить свое направление. Чтобы добиться таких результатов, авиаконструкторы находят различные решения, которые в сумме и называются технологиями стелс (англ. stealth − скрытный, невидимый)».
a) Способ разной стреловидности участков крыльев и других элементов летательного аппарата.
Все угловые изломы поверхностей, (кромки крыльев, законцовок крыла, вертикальных килей подвергающихся облучению РЛС должны иметь разные углы наклона к аэродинамическим осям летательного аппарата, включая углы установки поперечного «V»крыла. (П.1 Формулы.) Тогда полученный облучающий сигнал от РЛС в зоне поражения будет отражаться в разных направлениях, не попадая одновременно на приемную антенну РЛС с учетом периода ее вращения, сканирования. Так сами крылья в многопланах по передней кромке могут иметь разные углы стреловидности с соблюдением правил симметрии в плоскости осей XY. Тогда отраженный сигнал будет дробиться и раздробленный на более слабые сигналы отражаться по разным направлениям. Позже, когда противник найдет способ радиолокационного обнаружения таких летательных аппаратов по отраженному сигналу от крыльев, только в этом случае необходимо, каждое крыло еще разделить на участки с разной стреловидностью по передним кромкам. (Фиг.6,7,9,11-13, 16,18, 21-23,27) Тем самым еще раздробив и этот отраженный сигнал по разным направлениям, что незначительно ухудшит аэродинамические характеристики, но затруднит радиолокационное обнаружение. (П.1 Формулы.)
Геометрические длины участков с разной стреловидностью не должны быть одинаковыми, с соблюдением правил симметрии в плоскости осей XY, чтобы не допустить эффекта резонанса отраженного сигнала при сканировании радиопеленгатором некоторыми длинами волн.
b) Двигатели должны располагаться в радиолокационной тени от частей летательного аппарата, чтобы рассеять и поглотить радиопеленгаторный сигнал. По возможности одноразовые БПЛА с отделяемыми боевыми частями, должны сбрасывать отработавшие разгонные двигатели до входа в зону сильного ПВО. На рисунках (Фиг. 3-10 Листа №3) приведены примеры таких летательных аппаратов.
c) (П.1 Формулы). «Монолитная технология изготовления» летательных аппаратов одноразового использования, где взрывчатое вещество будет связующим веществом их силового каркаса из предварительно нагруженных неметаллических арматур, например из стекло и боро волокна. (см. Л.6) Гладкая поверхность литья под давлением обеспечит низкие коэффициенты лобового сопротивления. Конструкция не будет иметь: Выступающих стыков, подвешенных боеприпасов, массивных металлических деталей и негладких поверхностей. Поэтому будет прозрачна для большого диапазона длин волн и будет иметь малые радиусы зоны уверенного обнаружения и незначительное лобовое сопротивление в полете. (Лист 1. Фиг. 1,1а, 2,2а) В качестве связующего взрывчатого вещества для каждого из типов летательных аппаратов, выбирают из различных смесей на основе тротила, исходя из условий необходимой прочности при сжатии и нужной чувствительности к удару. Так, известно взрывчатое вещество «ВТО5» из патента SU1841147A1 от 20.07.2016 года способное быть связующим веществом, у которого прочность на сжатие деталей 30×30 мм при температуре 20°C, составляет 450-500 кг/см2, что соответствует твердости марки бетона «М-50». (См.Л.4). В то время, как удельная плотность на крыло современных самолетов не привышает 0,8 кгс/м2, (См.Л.9) что указывает на избыточный запас по прочности в «Монолитной технологии» изготовления летательных аппаратов одноразового использования. Некоторые изделия могут потребовать защитной окраски от ультрафиолетового излучения, влаги и в целях обеспечения принципа малой заметности. Силовой каркас летательных аппаратов многоразового использования в отличии от одноразовых может также изготавливаться по технологии «монолитной технологии», где к примеру пенополиуретан может стать связующим веществом, армированной обрешетки из стекло и боро волокон, с силовыми элементами из дерева, фанеры, различных пластиков. (П.1 Формулы). См.(Л6,17).
d) (П.2 Формулы). Для экранирования двигателя и других массивных металлических узлов добавляют в связующее вещество частицы, поглощающих электромагнитное излучение, такие как различные диполи. Тогда электромагнитная волна пройдя через такой экран и отразившись к примеру от двигателя вновь пройдет через этот экран, ослабив отраженный сигнал, тем самым уменьшив радиолокационную заметность летательного аппарата.
e) Для обеспечения малозаметности и помехозащищенности систем радиосвязи от радиопеленгаторных устройств между абонентами используют узконаправленные антенны, ведущие взаимный обмен информации преимущественно сжатыми закодированными пакетами в заданных пределах вертикальных, курсовых и азимутальных углов и имеют систему автоматической подстройки направления приемо-передающих антенн, а так же их перенаправления на заданные радиостанции с автоматическим изменением частоты радиосвязи. Так радиообмен информации со спутниками «Глонасс» должны быть строго в верхней области пространства. Для Разведывательных групп антенна должна быть узконаправленная, складная, со встроенным компасом для определения направления на заданную радиостанцию и индикацией силы радиосигнала. Это снизит влияние активных помех, снизит заметность радиостанций, повысит секретность в передаче информации. Летательные аппараты будут вести обмен информации путем отправления пакетов информации через узконаправленные антенны с заданных откорректированных курсовых углов, и углов тангажа. Корректировка направления антенны БПЛА осуществляется в заданных азимутальных углах по максимальному сигналу от радиокомпаса. Радио модули наземного и воздушного базирования будут принимать и передавать информацию пакетами через узконаправленные антенны с заданных азимутальных и вертикальных углов. Системы автоматической подстройки направления приемо-передающих узконаправленных антенн обеспечат получение сигнала наибольшей мощности от заданной радиостанции, защитят от обнаружения противником и его активных помех.
2) От инфракрасного обнаружения.
a) Двигатель, его выхлопные газы, реактивные высокотемпературные струи должны экранироваться частями летательного аппарата. С нижней полусферы двигатель прикрыть экраном угловатого типа. Так крылья бипланов и особенно трипланов (Фиг.15-19,24,26,28,30) обеспечивают сегментарное экранирование с большинства ракурсов. В случае ракетной атаки можно изменить курс и крен летательного аппарата до заданных в зависимости от ракурса выпущенной ракеты, чтобы прикрыться крыльями как экраном от инфракрасной головки самонаведения.
b) Одноразовым БПЛА с работающими двигателями зону сильной ПВО по возможности проходить с учетом положения солнца на пикировании с большими углами стреловидности для увеличения экранного эффекта от крыльев и сокращение времени на захват и пуск ракет с инфракрасными головками самонаведения, а так же для увеличения запаса устойчивости по перегрузке на боевом курсе. Дело в том, что при увеличении углов стреловидности (F) фокус летательного аппарата смещается назад быстрее, чем центр тяжести, обеспечивая значительный рост запаса устойчивости по перегрузке. Для обеспечения устойчивости на малых углах стреловидности можно использовать более толстые профили законцовок задних крыльев.
3) От визуального обнаружения.
a) Использовать большие высоты и большие скорости на малых высотах, плохую видимость, темное время суток, плохие погодные условия (облачность туман), заход на цель со стороны солнца.
b) Человеческое зрение устроено так, чтобы замечать в первую очередь контрастное цветовое пятно на фоне неба и границу внешнего периметра объекта. Для каждого времени суток в заданном районе боевых с учетом времени года действий существуют определенные тона окраса, которые будут незаметны на фоне неба даже с небольших расстояний для большей части людей. Нужно опытным путем подобрать 3 основных тона в разное время суток светлого времени. Окрасить пятнами этими тонами периметр видимого силуэта с земли. Тогда на фоне неба часть пятен будет незаметна, другая малозаметна, и последняя заметна. Но поскольку эти пятна не смыкаются, то человеческому глазу объединить их в какую-то конструкцию будет сложно на больших расстояниях, граница контура силуэта будет размыта, при этом носовая часть и хвостовая должны быть из разных тонов. Окраска внутри периметра силуэта летательного аппарата этими пятнами должна делить эту поверхность на размытые куски неправильной формы. При этом верхняя часть летательного аппарата при кренах будет иметь большую освещенность, чем нижняя, поэтому окраска верхней части летательного аппарата должна быть темнее по тону. Переход из одного тона в другой может быть размыт пиксельным способом окраски, либо полутонами, полученными смешиванием красок выбранных тонов, что еще уменьшит контрастность цветного пятна на фоне неба.
c) Применение бипланов, трипланов, с крыльями коробчатой схемы позволит уменьшить площади проекций летательных аппаратов, лучше спрятать двигатель.
d) Вероятность воздушных боев с ближних дистанций маловероятна. Это связано возросшими дистанциями боевого поражения противника и отсутствием необходимости визуально наблюдать воздушную цель для ее поражения. Да и перехват воздушной цели будет происходить в основном с нижних полусфер. Нет смысла окрашивать верхнюю часть самолета под фон земной поверхности. Космическая и воздушная разведка дронами будут обнаруживать летательные аппараты на бетонных аэродромах. Космический электронный «глаз» сможет приближать, менять контрастность и насыщенность изображения неподвижных целей, поэтому нет особого смысла делать верхнюю окраску под поверхность земли. На земле от такого «глаза» использовать маскировочные сети. Тогда при больших кренах летательный аппарат не будет резко терять визуальную незаметность из-за разного цвета окраски верхней и нижней частей летательного аппарата. Поскольку космический электронный «глаз» не может видеть объемное изображение, то закрепленные на земле полотнища вырезанные по периметру боевых целей, и расстеленные на земле в любое время года смогут хорошо имитировать ложные цели для ракетной атаки противником. Это позволит сократить расходы на надувные ложные цели самолетов, вертолетов, танков и т.д.
B. Управление углами стреловидности крыльев за счет скоростного напора воздуха. (П.3 Формулы) Варианты:
1) Шестеренчато-тяговая система стабилизации. (Фиг.35-36).
Силы трения (Х) задних крыльев больше, чем передних, поэтому крылья (13) начинают раскрываться. Киль полностью (15) поворотный находится во флюгерном положении до достижения заданного угла стреловидности, потом управляемый режим. Усилия от задних крыльев синхронизируются и передаются за счет шестеренчатого и тягового механизмов (10а,12б,14,10) передним крыльям в соответствии с соотношением плеч поворота (а,б), чтобы обеспечить опережающий поворот задних крыльев, нормальный полет на всех эксплуатационных режимах.
2) Ременно-тяговая система стабилизации. (Фиг.37-41)
Силы трения (Х) и аэродинамические (Zво, Zк) от киля и руля направления создают крутящие моменты (Мкрво, Мкрк) на киль и крылья. Зубчатые ремни на шкифах (12а) синхронизируют и передают усилия скоростного напора через систему рычагов (14) от поворота задних крыльев по ветру на изменение стреловидности передних крыльев против ветра, используя разность плечь рычагов, как передаточное отношение угловых перемещений и крутящих моментов. Один ремень прямо соединяет вал вращения и шкиф, другой соединяет с перекруткой на 180 градусов для обеспечения синхронности с защитным устройством от перетирания. Имеются датчики углов стреловидности крыльев.
3) Тяговая система (Фиг.42).
Силы трения (Х) задних крыльев больше, чем передних, поэтому крылья (13) начинают раскрываться. Киль полностью (15) поворотный находится во флюгерном положении, управляется рулем направления и механизмом фиксации угла поворота киля. По достижению заданного угла стреловидности, рули направления, поворачивают кили до заданного угла разворота, где они фиксируются. Возникшая аэродинамическая боковая сила от возникшего угла атаки, помогает изменять стреловидность крыла, увеличивая Мкр. Усилия от задних крыльев синхронизируются и передаются за счет тягового механизмов (14,) передним крыльям в соответствии с соотношением плеч поворота (а,б), чтобы обеспечить опережающий поворот задних крыльев, нормальный полет на всех эксплуатационных режимах. Где поворот крыльев фиксируется на заданных углах стреловидности, кили переходят в флюгерный режим, где они разворачиваются вдоль продольной оси летательного аппарата, где снова фиксируются.
C. Летательные аппараты вертикального взлета и посадки.
Известны двигатели современной военной авиации с соосными винтами от Ка-52, Ту-95, двигатели с отклоняемыми векторами тяги КБ «Миг» и «Су», которые с небольшими доработками вполне смогут быть применены в данной концепции. (Фиг.20-25, 28, 30-32) На режимах взлета, висения и посадки у летательных аппаратов будет отмечаться неустойчивость по крену и тангажу, снижение управляемости, поэтому энергичный взлет, быстрое удаление от земли на безопасную дистанцию, уменьшит аварийность. Поэтому эта рекомендация включена в п.6 Формулы изобретения. Вертолетоносцы после переоборудования трюма и палубы смогут подавать на верхнюю палубу упомянутые летательные аппараты вертикального взлета и посадки, специальными зажимами отпускать их в энергичный отрыв от земли, только после достижения ими взлетной мощности двигателей под заданными углами наклона их взлетных траекторий, учитывающих силу ветра, что предотвратит снос ветром из зоны безопасного старта, и даст уже на высоте время пилоту, (либо оператору БПЛА) выровнять летательный аппарат. При невозможности использовать специальные зажимы, силу ветра компенсировать величиной взлетного угла против ветра летательными аппаратами с соосными винтами, а для аппаратов с отклоняемым вектором тяги использовать взлет против ветра с углами наклона тяги двигателей, компенсирующих снос ветром. Для подобных летательных аппаратов шасси можно заменить опорными стойками (24) и транспортными тележками (17) для их перевозки по твердой поверхности. Возможно использование таких летательных аппаратов для экстренной эвакуации раненых и терпящих бедствие, путем прикрепления к ним спасательных и санитарных модулей.
1) Летательные аппараты с отклоняемым вектором тяги. (Фиг. 20-23, 25)
Для палубной авиации использована схема летающее крыло с фиксированной или переменной стреловидностью. В данной концепции положение центра тяжести (ЦТ) и фокуса самолета (F) при некоторых углах стреловидности может выйти за границы контура летательного аппарата,(Фиг.18,19,23), поэтому можно разместить отклоненную вниз тягу двигателя близко к расположению центра тяжести. (Фиг.21-23,25) Необходимо в транспортном положении обеспечить равновесие при транспортировке использованием наземной тележки (17) Фиг.15. Предложенная концепция позволяет так же использовать многопланы коробчатого типа изменяемой или фиксированной стреловидности. (Фиг.25) Даже коробчатого типа крылья могут изменять свою стреловидность с помощью набегающего потока воздуха, электрических или гидравлических приводов. Быстрое изменение вектора тяги в продольной и поперечной оси летательного аппарата позволит компенсировать неустойчивость летательного аппарата в режимах взлета, посадки и висения. Расположение соплового аппарата двигателя в отклоненном положении выше центра тяжести летательного аппарата увеличит его устойчивость на взлете, посадке и висении, при этом центр тяжести должен находится между шасси или опорными стойками.
2) Летательные аппараты с соосным двигателем и жестким винтом вертолетного типа. (Фиг.28, 30-32).
На (Фиг.52) изображены векторные эпюры воздушных потоков на висении. Источник (см. Л.19). Для обеспечения максимальной эффективности элевонам, килям и рулям направления диаметр винтов должен быть больше размаха крыльев, чтобы эти рули управления находились в зоне самого интенсивного обдува винтов на висении. (П. 6 Формулы изобретения.) Применение крыла и винта летательного аппарата большого удлинения, увеличат тягу и КПД двигателя, и аэродинамическое качество упомянутого аппарата, что повысит практический потолок и дальность полета, уменьшит расход топлива, предоставит эффективность рулям управления летательного аппарата при малых скоростях полета. Использование многопланов коробчатого типа увеличит прочность конструкции и уменьшит угловые размеры летательного аппарата при незначительном ухудшении летных характеристик. (Фиг.30-32) Размещение киля и руля направления на концах стреловидного крыла, в зоне интенсивного обдува воздушным потоком от соосных винтов, обеспечит достаточную управляемость на взлете и посадке даже без использования «автомата перекоса». Летательный аппарат моно и многоплана с соосным жестким винтом использует свойства летающего крыла большого удлинения, позволяющие взлетать, садиться и зависать по вертолетному, а летать по самолетному. Жесткость винтов позволит ослабить их вредную интерференцию, взаимовлияние. Создание небольшого отрицательного угла стреловидности винтов (Λв) увеличит устойчивость летательного аппарата по углам атаки и скольжения. (Фиг.52) Так подъемную силу винтов (Yв) на левом и правом секторе окружности от вращения винтов можно разделить на 2 вектора (Y1, Y2). При наличии встречного скоростного потока воздуха (V) и случайно возникшего скольжения, изменятся углы наклона подъемной силы (Yв) левого и правого секторов, соответственно изменятся и проекции векторов (Y2) обоих секторов, которые создадут восстанавливающий крутящий момент относительно центра тяжести (Цт). Аналогично будет работать и устойчивость по углу атаки. Загнутые вперед законцовки винтов (64), так же повышают упомянутые устойчивости и снижают индуктивное сопротивление винтов за счет уменьшения перетекания воздуха с из под нижних поверхностей на верхнюю, аналогично крыльям самолета. (Обоснование п.6 Формулы.) Для дешевых электрических БПЛА соосные винты могут не иметь автомата перекоса, механизма изменения шага винта и редуктора, уравнивающие угловые крутящие моменты. Тогда электрический мотор будет с вращающимся ротором и статором, раскручивая оба винта в разные стороны, а выравнивание угловых крутящих моментов будет достигаться равенством реактивных моментов, точная настройка осуществляется периодической регулировкой установочных углов шага винтов на земле вручную. После запуска двигателя на земле следует отследить неуравновешенный крутящий момент. Для выравнивания крутящих моментов необходимо изменить шаг передних или задних винтов. Заход на посадку можно осуществлять по самолетному (59 Фиг.51). Выравнивание (перевод аппарата в вертикальное взлетно-посадочное положение) тоже по самолетному. Выравнивание закончить на высоте выдерживания, (61) (гашение горизонтальной составляющей скорости на высоте от 1 до 10 метров в зависимости от условий. После гашения горизонтальной скорости, («выравнивания»), подбора угла сноса, осуществить посадку. Взлет энергичный (61) с учетом необходимого наклона корпуса в сторону ветра. После взлета выровнять аппарат аэродинамическими рулями управления, начать разгон с уменьшением угла тангажа до заданного полетным заданием. Предложенная концепция допускает взлет и посадку таких аппаратов на водную поверхность при частичном погружении в воду, заданной плавучести, и обеспечения остойчивости на воде, например для спасения терпящих бедствие или для пеленгации подводных лодок противника. Здесь потребуется удлиненная втулка винтов и герметизация корпуса летательного аппарата.
Недостатки.
Проблема вибрации соосных винтов успешно решена на Ка-50 и Ту-95.
Неустойчивость и снижение управляемости на посадке летательных аппаратов с соосными жесткими винтами и с отклоняемым вектором тяги.
Меры противодействия:
Указанные недостатки можно компенсировать, применением п.7 формулы, увеличением площади рулей в зоне обдува, использованием предкрылков, создающих пикирующий момент, натренированностью пилотов, (операторов БПЛА) либо использовать автоматизированные системы взлета и посадки.
3) Недостатки аналогов и преимущества предлагаемой концепции.
Палубным самолетам с реактивными двигателями требуется ВПП для разгона и посадки, самолеты вертикального взлета типа Як 40, имеют малый радиус действия и боевую нагрузку. Вертолеты имеют малую скорость и высоту полетов по отношению с самолетами и невысокую боевую нагрузку. Данная концепция реализует лучшие характеристики самолетов и вертолетов.
D. Основное преимущество летательных аппаратов с изменяемой стреловидностью крыльев крыла это высокие аэродинамический качества, большой диапазон скоростей и высот, компактность при хранении и транспортировке. Одноразовые летательные аппараты военного назначения с изменяемой стреловидностью крыла будут иметь дополнительные преимущества при их транспортировке контейнерами, сократят время их предполетной подготовки перед боевым применением в зоне боевых действий, обеспечат большую дальность боевых действий по сравнению с существующими аналогами
E. Крылатые ракеты с разделяемыми боевыми частями (Фиг.3-5, 6-10) и с неразделяемыми (Фиг.35-39, 40).
Крылатые ракеты доставляются и устанавливаются на пусковые установки со сложенными крыльями. На месте старта крылья раздвигают до заданной стреловидности крыла.
Наземный или морской старт (Фиг.3) может осуществляться с минимальными углами стреловидности крыльев в целях обеспечения максимального угла набора высоты. Перед отделением от разгонного ракетного блока у 2-х боевых частей нужно увеличить стреловидность крыльев за счет набегающего скоростного потока, чтобы обеспечить устойчивость и управляемость в новом режиме. (Фиг.4) После подхода к заданной цели можно использовать избыток высоты и увеличение стреловидности крыла для разгона скорости при атаке на цель в зоне сильной ПВО. (Фиг.5).
Воздушный старт отличается тем, что только после отделения от самолета крылья за счет воздушного потока уменьшают свою стреловидность до заданной. После стабилизации положения в пространстве запускаются ракетные разгонные блоки для увеличения скорости, высоты и дальности полета. Дальнейший полет аналогичен полету с наземного старта.
F. Управляемы бомбы. (Фиг.1,6,7,11-13).
Управляемые бомбы в виде сложенных крыльев сбрасываются с летательных аппаратов преимущественно с больших высот, вне зоны поражения, чтоб обеспечить максимальную дальность планирования УАБ. Заднее расположение килей обеспечит устойчивость их после отделения. (Фиг.6). Затем за счет скоростного напора крылья уменьшают свою стреловидность до заданных значений и планируют на цель. При наличии возможности используют высоту и уменьшение стреловидности для увеличения скорости и устойчивости по углам атаки и скольжения на боевом курсе, чем обеспечит более точное наведение на цель.
G. БПЛА разведчики, бомбардировщики, истребители, транспортники.(Фиг.24,26-28,30-32)
Изготавливаются по технологии многоразового использования из композиционных материалов, могут иметь постоянную и изменяемую стреловидность. БПЛА- способны нести авиационные бомбы, ракеты класса Воздух-воздух инфракрасного наведения.
1) БПЛА-истребители используют подвешенные на внешнюю подвеску ракеты «Воздух-воздух» против летательных аппаратов противника, либо сами становятся ракетами при запуске дополнительных разгонных двигателей, если они изготовлены по технологии летательных аппаратов одноразового использования. Наводятся на воздушные цели радиотехническими модулями до захвата целей головками самонаведения, либо свободной охотой в заданном районе воздушного пространства.
2) БПЛА разведчики (Фиг.52) выявляют и передают сведения на радиотехнические модули о колонах и складах снабжения, сосредоточении техники и личного состава противника, состоянии промышленной инфраструктуры в оперативной и стратегической глубине. Монопланы (Фиг.52) с большими удлинениями крыла БПЛА разведчиков будут более экономичными за счет повышения аэродинамического качества, использование аппаратов вертикального взлета и посадки с соосными винтами еще увеличит КПД винтов, за счет их большого удлинения.
3) БПЛА бомбардировщики преимущественно с большими площадями крыльев по целеуказанию радиотехнических модулей находят, захватываю цели, бомбардируют простыми и управляемыми бомбами колонны и склады боеприпасов и топлива, самолеты на аэродромах противника в оперативной и стратегической глубине. Сброс авиабомб осуществляется синхронно по заданным схемам, чтобы не нарушить центровку, устойчивость и управляемость бомбардировщика.
H. БПЛА транспортные вертикального взлета и посадки вывозят раненых, терпящих бедствий, катапультирующихся, перевозят грузы. Управляются программами полета, радиотехническими модулями, операторами, «Глонасс» и радиомаяками, обеспечивающих автоматическую посадку, на выбранную площадку. Оператор по видеосвязи с использованием ретрансляторов радиотехнических модулей осуществляет посадку БПЛА в ручном режиме. Возможен вариант управления оператором на месте посадки. В автоматическом режиме радиотехнический модуль, Глонасс, и инерционная система навигации выводит БПЛА в заданный район, где уже по радиокомпасу от радиомаяка он летит к месту посадки до захвата аппаратурой посадочного узконаправленного радиолуча или лазерного от радиомаяка для посадки.
I. Барражирующий боеприпас (Фиг.29, 34)
Изготовленный по технологии моно или многоплана одноразового использования с постоянным углом стреловидности обеспечит увеличение полезной нагрузки за счет применение взрывчатого вещества как силового элемента; сократит время изготовления и удешевит производство за счет литья в пресс-формах под давлением. Такой боеприпас может оснащаться существующими дешевыми электрическим, поршневым, ТРД или реактивным двигателем, взлетать, как с ВПП, так и со стартовой установки. Управляется наземным оператором, а в стратегической глубине радиотехническими модулями, спутниковыми, GSM системами наведения по тактическим и стратегическим объектам (мостам, электростанциям, воинским эшелонам….) У барражирующего боеприпаса, взлетающего с аэродромов практически нет ограничений по размерам изготовления, следовательно и по весу взрывчатого вещества. «Монолитной технологией» можно изготовить многотонный боеприпас, достаточный для разрушения любого наземного объекта, сооружения, таких как авианосец, мост, электростанция или оборонное предприятие.
Недостатки ЛА:
Используемая схема «летающего крыла» монопланного и многопланового типа не позволяет успешно летать с крыльями малых стреловидности, потому что тогда положение центра масс (ЦТ) и фокуса (F) сместится сильно вперед, уменьшив запас устойчивости по перегрузке.
За счет только набегающего воздушного потока невозможно установить около нулевую стреловидность крыла.
В транспортном положении с убранными крыльями центр тяжести (ЦТ) сместиться назад (Фиг.14, 15) нарушая условия равновесия, кроме случаев использование разгонных блоков для 2-х боевых частей (Фиг.3-5), а так же крылатой ракеты схемы утка (Фиг.35-39).
Меры противодействия:
Не использовать малые углы стреловидности крыла, либо автопилот должен обеспечить удовлетворительную устойчивость по перегрузке.
В транспортном положении с убранными крыльями на земле, в целях обеспечения условий равновесия, закреплять в хвостовой части дополнительную тележку с колесами или опору.
1) Изменение углов стреловидности за счет набегающего воздушного потока будет занимать продолжительное время без маневренного полета летательного аппарата при около нулевой перегрузке. (Фиг.35-39), чтобы исключить неуравновешенные крутящие моменты от изменения фокуса и создания подъемной силы, индуктивного сопротивления. Обоснование п.3 Формулы.
Меры противодействия:
Использовать полностью управляемые килевые устройства, либо для изменения стреловидности крыла использовать гидравлические или электрические системы. Для сложенных задних крыльев крылатых ракет воздушного пуска, их кили вертикального оперения должны находится во флюгерном режиме с момента взлета и до уменьшения углов стреловидности до заданных за счет только лобового сопротивления. (Фиг.39)
2) Из космоса, визуально с земли, с самолета перехватчика в светлое время суток и хорошую погоду можно обнаружить и навести стрелковое оружие против подобных летательных аппаратов. В темное время противник может попытаться осветить прожекторами и сбить стрелковым оружием, если успеет прицелится.
Меры противодействия:
Скорость пикирования на цель следует увеличить до максимально возможной, чтобы снизить возможности ПВО противника в прицеливании. Технология применения должна использовать темное время суток, как исключение, заход на цель со стороны солнца, либо в погодные условия с плохой видимостью. Скорость поражения на конечном участке должна подбираться из условий ПВО объекта увеличением угла пикирования. Окраска должна усиливать незаметность от визуального обнаружения сверху и снизу под каждые из условий применения.
3) При сильном разгоне летательных аппаратов на сверхзвуковых скоростях, как следствие тепловом нагреве выступающих частей летательного аппарата повысится инфракрасная заметность летательного аппарата, может начать оплавляться взрывчатое вещество на упомянутых участках.
Меры противодействия:
Для скоростных моделей из-за перегревания некоторых передних частей крыла и фюзеляжа, обшивка должна быть более прочная и содержать слой теплоизоляции, обеспечивая прочность конструкции на всех эксплуатационных режимах. Запуск летательных аппаратов, БПЛА, крылатых и баллистических ракет должен осуществляться в зависимости от скорости под заданным углом тангажа, чтобы не допустить перегрева конструкции от излишнего разгона скорости, и использовать режим максимальной скороподъемности.
4) Невозможность использовать массивные металлические осколочного действия боеприпасы, потому что они могут быть обнаружены радиолокационными средствами ПВО. Компенсировать поражающий фактор можно увеличением массы взрывчатого вещества, зажигательными и объемно детонирующими зарядами.
J. Боевые части средств поражения: Неуправляемые реактивные снаряды, бомбы фугасного, фугасно-зажигательного действия, противотанковые, баллистические и крылатые ракеты, гранаты для гранатометов, мины для минометов. (П.1 Формулы.)
Корпус боевой части заливается по «Монолитной технологии» взрывчатыми веществами. Внутреннюю часть корпуса можно заполнить зажигательной смесью или взрывчатым веществом, вкрутить заглушку. В боевую часть перед пуском по нарезанной резьбе в корпус из взрывчатого вещества вкручивается взрыватель. При производстве ракет, мин для минометов использовать при заливке защитные металлические, деревянные или пластиковые втулки большего диаметра, чем боевая часть, небольшой длинны, чтобы они скользили по направляющим и задерживали исходящие газы от просачивания к боевой части. К примеру, задняя часть пластиковой втулки начнет плавится и спрессовываться с передней частью, уменьшая зазоры в направляющей трубе, увеличивая скорость разгона, сохраняя направляющие от износа, а деревянная сохранит от перегрева боевой части и сохранит стволы от износа. Размер и материал втулок должен обеспечить, высокие стартовые ускорения сохранность боевой части, в том числе от преждевременной детонации, и ламинарное обтекание после пуска, малый износ стволов направляющих. Использование подобных втулок боевой части снарядов снизит износ артиллерийских, минометных, гранатометных стволов …. После выхода из направляющей будет срыв пламени, и охлаждение боевой части воздушным потоком.
Возможно, добавление к фугасной части ракеты зажигательных и объемно детонирующих смесей. В виду возможного перегрева и оплавления головной части ракеты при сверхзвуковых скоростях следует дополнительно установить съемный передний гладкий обтекатель из теплоизоляционного материала, который должен обеспечить достаточную прочность конструкции ракеты до момента поражения цели во всем эксплуатационном диапазоне температур, скоростей и времени полета.
Гранаты гранатометов должны содержать достаточно взрывчатого вещества, для поражения фугасом оборонительных сооружений, любого танка с динамической защитой, гарантировано и со всех ракурсов, вывода из строя солдат противника от воздействия перепада давления взрывной волны. Преимущество этих боеприпасов перед аналогами дешевизна производства и снижение производственных затрат человеко-часов, возможность быстрого наращивания производства, при незначительном снижении боевых свойств.
K. Электрический двигатель для летательных аппаратов с соосными винтами и радиотехнических модулей. (Лист 15, Фиг.49,50) (П.9,10 Формулы.)
Конструктивно состоит из корпуса (51) с закрепленным на нем сердечниками генератора постоянного и переменного тока (51а), сердечниками с обмоткой роторов генераторов переменного и постоянного тока, (52а,53а). Возможна замена обмоток возбуждения ротора сильными магнитами. Двух роторов (52а,53а) с размещенной на них сердечниками с обмотками возбуждения, якорными (52б,53б), которые создают магнитные поля, заставляющие вращаться роторы с их воздушными винтами (52с,53с) в разные стороны, отталкиваясь друг от друга. Поскольку роторы отталкиваются друг от друга, то их крутящие моменты не передаются корпусу двигателя, то сильных крутящих моментов, воздействующих на летательный аппарат не будет. А возникающие крутящие моменты от сил трения в подшипниках можно отрегулировать изменением установочного шага винта либо изменением напряжения электрического тока в обмотках роторов. Особенно это качество ценно для радиотехнических модулей.
Осевые биения соосных лопастей будут парироваться пружиной (56), механизма гашения колебаний (57). Шайба, втулка связанная с осью шага винта при воздушном ударе от лопасти (52с), другая лопасть (53с) кратковременно перемещается по продольной оси вращения, натягивая пружину (56), гася импульс, вибрацию, передающуюся на корпус двигателя через первый внутренний вал ротора (52).
Поскольку роторы отталкиваются друг от друга, то угловые скорости винтов относительно воздушного потока будут в 2 раза ниже угловых скоростей вращения относительно друг друга. Есть возможность в случае необходимости установить механизм изменения шага винта, и аппарат перекоса, использовать другие способы гашения колебаний воздушного винта. Скорость и мощность вращения лопастей, количество фаз устанавливаются мощностью аккумулятора, сердечниками, обмотками, системой управления, качеством материалов, использованных на их производство в зависимости от диаметра винтов и величины необходимой подъемной силы. Есть возможность использовать наземный источник электропитания по проводу к аппарату, с устройством самостоятельного отцепления на заданном расстоянии для выполнения взлета, тренировки курсантами, пилотами, наземными операторами висения, взлета и посадки.
Этим обуславливается преимущество такого двигателя: Вместо двух двигателей и редукторов, используется один, без редукторов и коллекторов, с незначительным уровнем вибраций и крутящих моментов на креплениях двигателя. Это экономичнее, легче, прочнее и надежнее.
L. Радиотехнические системы и модули. (П.1 Формулы.)
1) Подъем радиотехнической системы.
Модули воздушные и радиотехнические изготавливают по единым стандартам значений подъемной силы и веса. Каждый шар должен поднимать только часть нагрузки, (вес радиотехнического модуля, части троса и электропровода), подвешенной к нему, все то, что закреплено на его участке (50) основного троса до следующего шара. Такая распределенная нагрузка уменьшит усилия на трос и силовые элементы модулей, наземного оборудования, за счет этого можно значительно увеличить высоту расположения радиотехнических модулей. В случае необходимости особо тяжелые нестандартные радиотехнические модули подвешиваются на нескольких стандартных шарах воздушных модулей, закрепленных на основном тросе последовательно, разнесенных на расстояние по высоте, обеспечивая исключение попадание 2 шаров в зону разлета осколков боевых средств поражения противника. Внутренний трос шара воздушного модуля нужно помещать воздухонепроницаемый чехол для герметизации и исключения повреждения оболочки шара. Тогда хомут (28) зажмет и загерметизирует Гелий в оболочке шара. Такой способ ускоряет ремонт и замену шара, обеспечит достаточную герметизацию. Наземный модуль зацепляется трос к одному или нескольким шарам воздушного модуля (30) посредством быстросъемного хомута крепления. Нижние части основного троса должны быть более прочными, чем верхние, из-за возросшей нагрузки. Из баллона через сосок (29) гелий закачивается в воздушный модуль для создания подъемной силы. Такая конструкция модуля воздушного шара позволит использовать двойную оболочку (30,30а) шара, (Фиг.46) что увеличит надежность и ремонтопригодность таких модулей. Через заданную длину троса, по отметкам на тросе, аналогично двумя хомутами зацепляется радиотехнический модуль. Потом через заданную длину троса, где имеется отметка, снова закрепляется воздушный модуль, затем радиотехнический итд.
2) Спуск радиотехнической системы.
Лебедкой наземного модуля подтягивается радиотехнический модуль, опускается и отцепляется быстросъемным хомутом. Далее подтягивается шар воздушного модуля, из которого компрессором из соска (29) выкачивается гелий в наземные баллоны, после отцепляется от основного троса. Далее подтягивается следующий радиотехнический модуль. И технология спуска повторяется.
3) Работа модулей радиопеленгаторного, радиосвязного и постановщика активных помех. (П.8,9,10 Формулы.)
На высоте 10 км и выше подается питание на двигатели верхних и нижних антенных систем радиопеленгаторного модуля. Две сбалансированные антенные системы, верхняя и нижняя, состоящих из нескольких параболических, фазовых или иных антенн, раскручиваются электродвигателем в разных направлениях вращения, уравновешивая возникающие крутящиеся моменты напряжением в обмотках, по команде соответствующих датчиков. Электродвигатель имеет два вращающихся ротора, обеспечивающих разнонаправленное вращение антенн, равенство крутящих моментов, не передачу их корпусу двигателя. В случае необходимости можно использовать дополнительно рули направления позади модуля. Для облегчения корректировки модулей в пространстве, центры тяжести модулей должны располагаться в нижней части вертикальной оси симметрии. Полученная информация от БПЛА разведчиков, радиотехнических модулей уточняется с учетом триангуляции от других радиопеленгаторных модулей на фоне карты местности, привязанных с помощью характерных радиолокационных ориентиров и передается по узконаправленным антеннам в он-лайн режиме на командные пункты, и на другие модули для ретрансляции.
Информация о подвижных (колоннах и поездах снабжения…) и неподвижные целях, складах, командных пунктов, узлов радиосвязи стартовых площадках, реактивных, артиллерийских и систем ПВО, местах взлета и посадки летательных аппаратов, направлении ракетных атака передается на КП. От туда дается команда на их поражение БПЛА бомбардировщиками и перехватчиками, наземными средствами ПВО.
Отдельно выделяются воздушные цели, вычисляется их курс и высота, вычисляется место старта и примерная зона поражения для ракет. В целях организации быстрого реагирования, БПЛА перехватчики для захвата головками самонаведении, наводятся на воздушные цели радиотехническим модулями в автоматическом режиме на нужном ракурсе, на основе расчетов по возможности такого перехвата. БПЛА разведчики в стратегической глубине управляются «Глонасс», радиотехническими модулями. Летательным аппаратам противника модули постановщики помех в автоматическом или ручном режиме ставят активные помехи узконаправленными антеннами системам целенаведения, и GPS. Использование узконаправленных антенн и переключение передачи информации на другие модули, зона сильной ПВО, ограничивают возможности ракетных атак самих радиотехнических модулей. Обмен информации командных пунктов и заданных радиосвязных модулей осуществляются узконаправленными антеннам по заданным азимутам и углам наклона антенн в вертикальной плоскости с системой автоматической подстройки, с возможностью быстрого переключения на другие радиосвязные модули, запороленными сжатыми файлами информации
4) Недостатки аналогов и преимущества радиотехнической системы.
a) Самолеты ДРЛО. Существующие аналоги дороги в производстве, трудно ремонтируемы, тяжелы, массивны, поэтому пока достигли высоты всего в 5 км. Самолеты ДРЛО уязвимы и дороги в обслуживании; время полета ограничено; требует дозаправки в воздухе, исключающую одновременный контроль всего воздушного пространства.
b) Аэростаты ограничены высотой до 5 км. Наземное их оборудование требует больших энергозатрат и массивности. Повреждение оболочки аэростата приведет к скоростному падению и повреждению оборудования. Использование аэростатов с закрепленными на них радиотехническими модулями, из-за наличия подъемной силы будут совершать колебательные движения. Скорости вращения существующих антенн обзорных радиопеленгаторов имеют ограничения, поэтому имеют сложности в обнаружении высокоскоростных воздушных и низколетящих целей. Использование самолетов ДРЛО, способных обнаруживать и ставить помехи дорого. Шары воздушных модулей, предлагаемой концепции, чуть больше будут создавать сопротивление движению воздуха, но без создания углов атаки, поэтому колебаний будет меньше, а радиотехнические модули растянутые тросами между шарами, подвергаться колебаниям будут еще в меньшей степени, чем шары, большая высота увеличит дальность действия, даст большую возможность обнаружении высокоскоростных воздушных и низколетящих целей.
c) Радиопеленгаторный модуль можно поднять на высоту 10 км и выше за счет использования промежуточных шаров воздушных модулей, которые будут компенсировать нагрузку радиотехнического модуля и вес троса до него. Это позволит отказаться от обеспечения особой прочности воздушных и наземных деталей и механизмов, уменьшит их массы. Чем больше воздушных модулей используется, тем меньше нагрузка на троса и оси радиотехнических модулей. В случае повреждения оболочки шара воздушного модуля, спуск будет плавным, за счет оставшихся шаров. Модульная унифицированная конструкция и быстросъемные хомуты позволит быстро поднимать, опускать, менять типы модулей и ремонтировать радиотехнические системы. Типы модулей: Обзорного радиопеленгатора пассивного и активного действия, активных помех, радиосвязного и ретрансляционного, навигационного, целенаведения, телеметрического, метеорологического… назначения.
Использование антенных систем с несколькими антеннами в блоке на больших высотах увеличит возможности обнаружения низколетящих и высокоскоростных целей за счет более частого сканирования и без увеличения скоростей вращения антенн на больших дальностях. (П.10 Формулы.) Расположение радиотехнических модулей по периметру зоны боевых действий, в том числе и в государствах, не участвующих в конфликте, позволит создать систему постоянного тотального контроля воздушного и наземного пространства противника, точную системы обнаружения и наведения на цели за счет триангуляции. (П.1 Формулы.)
Ветер не будет раскачивать антенны радиотехнических и воздушных модулей за счет применения шарообразных, элипсоидных форм, которые не будут иметь частоту собственных колебаний в отличии от аэродинамических форм, имеющих подъемную силу, углы скольжения и срыв потока. Система изменения углов крена и тангажа обеспечит стабильность и заданные углы сканирования пространства.
5. Техническая задача.
Достижением технического результата следует считать:
1) Удешевление производства летательных аппаратов; улучшение их аэродинамических и боевых характеристик; снижении боевых потерь при завоевании господства в воздухе и на земле при ведении дистанционных боевых действий в оперативной и стратегической глубине обороны;
2) Удешевление обучения курсантов, натренированности пилотов и наземных операторов висению, вертикальным взлету и посадке, использующих вышеупомянутый электродвигатель.
3) Обеспечение радиотехническими средствами ведения дистанционных боевых действий в целях получения господства в воздухе, на море и на земле в тактической и стратегической глубине обороны противника.
6. Технический результат достигается:
1) Ведением боевых действий преимущественно бесконтактным способом, управлением радиотехническими модулями войсками и БПЛА;
2) Массовым производством и применением летательных аппаратов малой заметности, преимущественно летающего крыла большого удлинения с килями на концах крыльев, в том числе, использующих многопланы и вертолетный способ взлета, посадки и полета самолетным способом; большого удлинения винтов и крыльев, имеющих разные углы стреловидности и «V» крыла, способных изменять свою стреловидность, используя силу набегающего скоростного напора, изготовленных относительно дешевым и быстрым монолитным способом под давлением, из материалов способных поглотить и пропустить через себя радиоволны радиопеленгаторов.
3) Использования взрывчатых веществ в качестве связующего монолитного способа изготовления одноразовых летательных аппаратов с распределенной нагрузкой по крылу, уменьшающих изгибающие моменты на части конструкции в целях увеличения их норм боевой нагрузки.
4) Использованием БПЛА разведчиков, бомбардировщиков, перехватчиков, транспортных, эвакуационных, барражирующих боеприпасов, крылатых ракет, в том числе и с отделяемыми боевыми частями, гранатометов, минометов, противотанковых ракет, реактивных снарядов…в тактической и стратегической глубине обороны противника.
5) Созданием учебно-тренировочного летательного аппарата на основе предлагаемого электродвигателя для летных частей и училищ. Реализация п.7 формулы изобретения, уменьшит требования к способностям пилотов, и ускорит их обучение и переучивание на новые типа летательных аппаратов..
6) Изготовление воздушных и радиотехнических модулей осуществляют по единым стандартом, конвейерным способом. Использование двух оболочных воздушных шаров увеличит их надежность. Применение быстросъемных хомутов ускорит запуск, демонтаж, замену и ремонт модулей.
7) Размещением по периметру государства противника в зоне сильной ПВО, на своей территории и союзных государств различных радиотехнических модулей поднятых модулями воздушных шаров тросом на высоты 10 км и выше за счет использования распределенной нагрузки позволит вести массированные, бесконтактные боевые действия на территории противника в тактической и стратегической глубине обороны.
8) Использованием стандартных радиотехнических модулей, в зависимости от спецификации для: Контроля воздушного, наземного, радиолокационного, пеленгаторного, радионавигационного, радиосвязного, метеорологического, визуального, инфракрасного пространства;
осуществления точечной радиокомпасной, радиопеленгаторной навигации узконаправленными антеннами для наведения на цель, определения местоположения;
выявления точного расположения целей, КП, мест старта летательных аппаратов, их направление движения, примерную зону возможного поражения за счет триангуляции систем радиотехнических модулей, воздушной и космических разведок, быстрой реализации полученных сведений;
оперативное наведение средств поражения из состава резерва на только что выявленные воздушные и наземные цели, средства ПВО;
обеспечения оперативной защищенной связью узконаправленными антеннами, имеющих систему автоматической настройки на заданную радиостанцию для приема-передачи информации КП войсковых частей,
сопровождение летательных аппаратов противника и постановка активных радиопомех воздушным и наземным целям, использующих радиоволны:
применения нескольких антенн в каждом радиопеленгаторном устройстве, увеличивающих частоту сканирования в целях обнаружения полета высокоскоростных летательных аппаратов, летящих в том числе и на малых высотах.
9) Оперативному централизованному управлению в том числе автоматически радиотехническими модулями различного вида БПЛА разведчиками, бомбардировщиками, перехватчиками, крылатыми ракетами, барражирующими боеприпасами для поражения летательных аппаратов, колон и поездов снабжения, средств ПВО, морских кораблей, артиллерийских и ракетных систем, аэродромов, мостов, электростанций, военных заводов, мест сосредоточения войск в тактической и стратегической глубине противника. У одноразовых БПЛА аэродромного взлета нет ограничений по массе взрывчатых веществ, а дешевая и быстрая технология их изготовления, малая заметность, особенно в условиях плохой видимости и ночью позволят осуществить массовое и точечное их применение по крайней мере год или два.
7. Источники сведений и и литература.
Л1. ПРОМЫШЛЕННЫЕ ВЗРЫВЧАТЫЕ ВЕЩЕСТВА Тулепов М.И.
Учебное пособие Алматы, 2015 Промышленные взpывчaтыe вeщecтвa. – Aлмaты: Қaзaқ унивepcитeті, 2015. – 124 c.
https://mipt.ru/upload/medialibrary/831/lagarkov_pogosyan.pdf
Л2. ФУНДАМЕНТАЛЬНЫЕ И ПРИКЛАДНЫЕ ПРОБЛЕМЫ СТЕЛС-ТЕХНОЛОГИЙ А.Н.
Лагарьков, М.А. Погосян Лагарьков Андрей Николаевич - чл.-корр. РАН, директор Института теоретической и прикладной электродинамики Объединенного института высоких температур РАН. Погосян Михаил Асланович - чл.-корр. РАН, директор ГУП авиационно-промышленного комплекса "Сухой". https://mipt.ru/upload/medialibrary/831/lagarkov_pogosyan.pdf
Один из технологических приемов, позволяющих снизить заметность самолета, - использование крупногабаритных панелей сложной формы в качестве элементов конструкции фюзеляжа (рис. 9). Установив такую панель, можно существенно сократить число стыков обшивок на поверхности самолета и количество заклепочных и болтовых соединений, которые являются элементами отражения в переднюю полусферу при различных ракурсах.
Л3. Карпович Елена Анатольевна. Автореферат диссертации на соискание ученой
степени кандидата технических наук Москва, 2020. Разработка научно-методического обеспечения для формирования облика и оценки характеристик легкого самолета с крылом коробчатой схемы на ранних этапах проектирования
https://mai.ru/upload/iblock/b19/Avtoreferat-Karpovich.pdf
Л4. Патент № 1841147А1 на изобретение «Взрывчатый состав «ВТО-5 для
формирования бескорпусных изделий» заявка от 980846, 17.02.1967 https://patenton.ru/patent/SU1841147A1.pdf
Л5. Заявка на изобретение №2021104565А от 24.02.2021 «КОРОБЧАТАЯ
МОНОЛИТНАЯ КОНСТРУКЦИЯ ИЗ КОМПОЗИЦИОННОГО МАТЕРИАЛА ДЛЯ ФЮЗЕЛЯЖЕЙ И КРЫЛЬЕВ ЛЕТАТЕЛЬНОГО АППАРАТА И СПОСОБ ИЗГОТОВЛЕНИЯ УКАЗАННОЙ КОНСТРУКЦИИ» https://new.fips.ru/publication-web/publications/document?type=doc&tab=IZPM&id=35994B3E-2133-4AA0-8C8D-D6C183CD5130
Л.6. Статья А.С.Колобкова «ПОЛИМЕРНЫЕ КОМПОЗИЦИОННЫЕ МАТЕРИАЛЫ ДЛЯ
РАЗЛИЧНЫХ КОНСТРУКЦИЙ АВИАЦИОННОЙ ТЕХНИКИ» в Научно-техническом журнале "ТРУДЫ ВИАМ" №6-7 за 2020 год. http://viam-works.ru/ru/articles?art_id=1563
Л.7. Статья Ростеха от 14.04.2022 года «Видимо-невидимо история Стелс технологии»
https://rostec.ru/news/vidimo-nevidimo-istoriya-stels-tekhnologiy/
Л.8. Книга Пётра Уфимцева «Метод краевых волн в физической теории дифракции» 1962 года в издательстве «Советское радио» тираж в 6500 экземпляров.
Л.9. Учебное пособие И. В. Чепурных «ПРОЧНОСТЬ КОНСТРУКЦИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ» УДК 629.7.015.4(07) ББК 39.52-016я7 Ч-446 Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Комсомольский-на-Амуре государственный технический университет» (ФГБОУ ВПО «КнАГТУ») Комсомольск-на-Амуре 2013 год https://knastu.ru/media/files/page_files/page_421/posobiya_2013/_Chepurnykh_Prochnost_konstruktsy_letatelnykh_apparatov.pdf
https://lektsii.net/3-73288.html
Л.10. Видео из интернета https://www.youtube.com/watch?app=desktop&v=yug0uUMswA0
Л.11. БПЛА вертикального взлета и посадки. Патент №RU2015130267 от 25.01.2017 г. Прототип. https://new.fips.ru/publication-web/publications/document?type=doc&tab=IZPM&id=5AA0A517-FAD3-4F55-A8FB-2E52E27445A9
Л.12. Прототип. Многооболечечный аэростат. Заявка 2013133249/11 от 16.07.2013 https://www1.fips.ru/Archive/PAT/2014FULL/2014.06.10/DOC/RUNWU1/000/000/000/141/704/DOCUMENT.PDF
Л.13. Аэростатная система наблюдения. Патент № 2761326от 07.12.2021 Прототип. https://new.fips.ru/publication-web/publications/document?type=doc&tab=IZPM&id=E478EC0D-1A3E-4D39-AB0C-887747EFED7F
Л.14. Привязой аэростат. Заявка: №2018111116 от 28.03.2018 Прототип. https://new.fips.ru/publication-web/publications/document?type=doc&tab=IZPM&id=374A0E70-42E4-4E88-AE60-B6D177955F68
Л.15. Беспилотный самолет. Прототип самолета вертикального взлета и посадки. RU2613629 от 21.03.2017 года. https://new.fips.ru/publication-web/publications/document?type=doc&tab=IZPM&id=16CBE4AE-8C03-43DC-87F5-7EA9C522861E
Л.16. Тейлситер. Патент №2775027 С1 от 27.06.2022 года, главный прототип летательных аппаратов вертикального взлета и посадки.
https://new.fips.ru/publication-web/publications/document?type=doc&tab=IZPM&id=31584EED-7128-46C7-992D-906394DBC050
Л.17. Самолет. Патент № RU2316449 C2 от 20.05.2007 года. Прототип самолета изменяемой стреловидности крыльев.
https://www1.fips.ru/Archive/PAT/2008FULL/2008.02.10/DOC/RUNWC2/000/000/002/316/449/DOCUMENT.PDF
Л.18. Статья «Полимеры в авиастроении» Автор: Каргин В.А., академик АН СССР Источник: Энциклопедия полимеров, под редакцией В.А. Каргина Дата в источнике: 1972 г. https://mplast.by/encyklopedia/polimeryi-v-aviastroenii/
Л.19 Патент RU201664 U1 от 28.12.2020 года «Узконаправленная волновая антенна радиолокационной системы обзора.» В диапазоне частот 9000-9450МГц, диаграмма направленности по ширине 0,35 градуса в горизонтальной плоскости и 11 градусов в вертикальной плоскости. https://yandex.ru/patents/doc/RU201664U1_20201228
Л.20 «Динамика полета вертолета» https://dcs-docs.lordvesel.win/ru/mi8/03.dynamic/
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
| УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2020 |
|
RU2743262C1 |
| АВИАЦИОННЫЙ УДАРНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2019 |
|
RU2722520C1 |
| ПРОТИВОКОРАБЕЛЬНЫЙ АВИАЦИОННО-УДАРНЫЙ КОМПЛЕКС | 2020 |
|
RU2749162C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ | 2019 |
|
RU2708782C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
| ЛЕТАЮЩИЙ РОБОТ-НОСИТЕЛЬ РАКЕТ КОРАБЕЛЬНОГО И ВОЗДУШНОГО БАЗИРОВАНИЯ | 2018 |
|
RU2711430C2 |
| АВИАЦИОННО-РАКЕТНАЯ УДАРНАЯ СИСТЕМА | 2019 |
|
RU2721803C1 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |



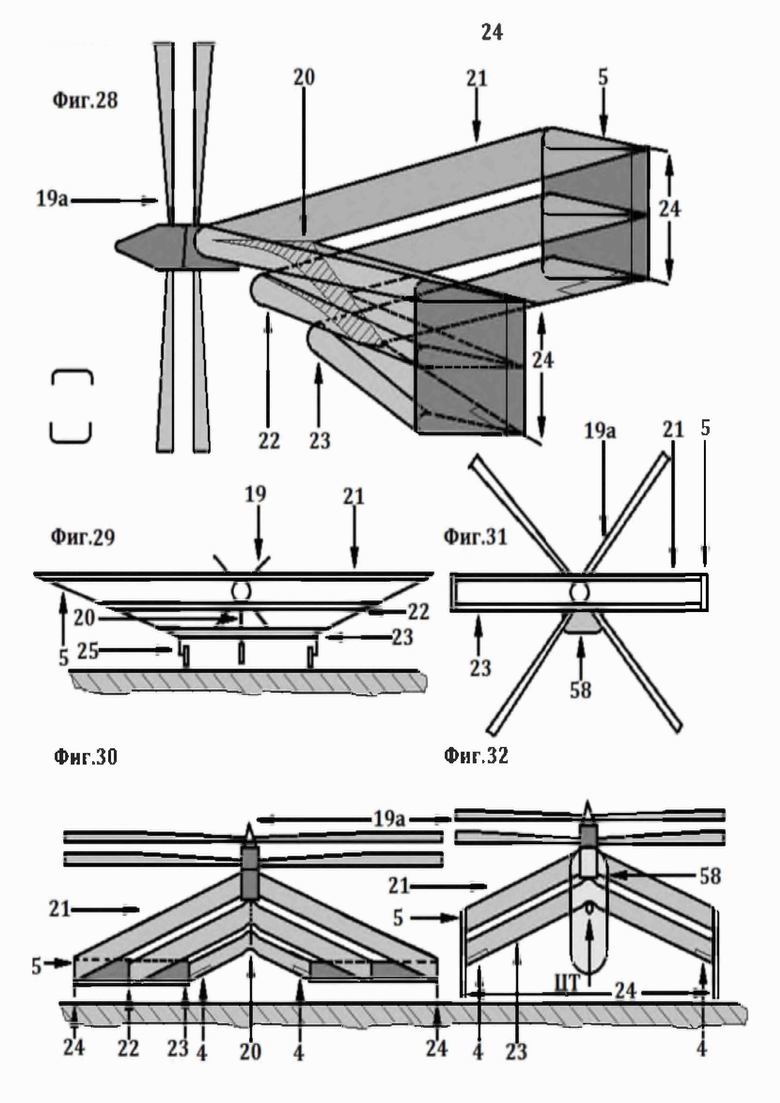




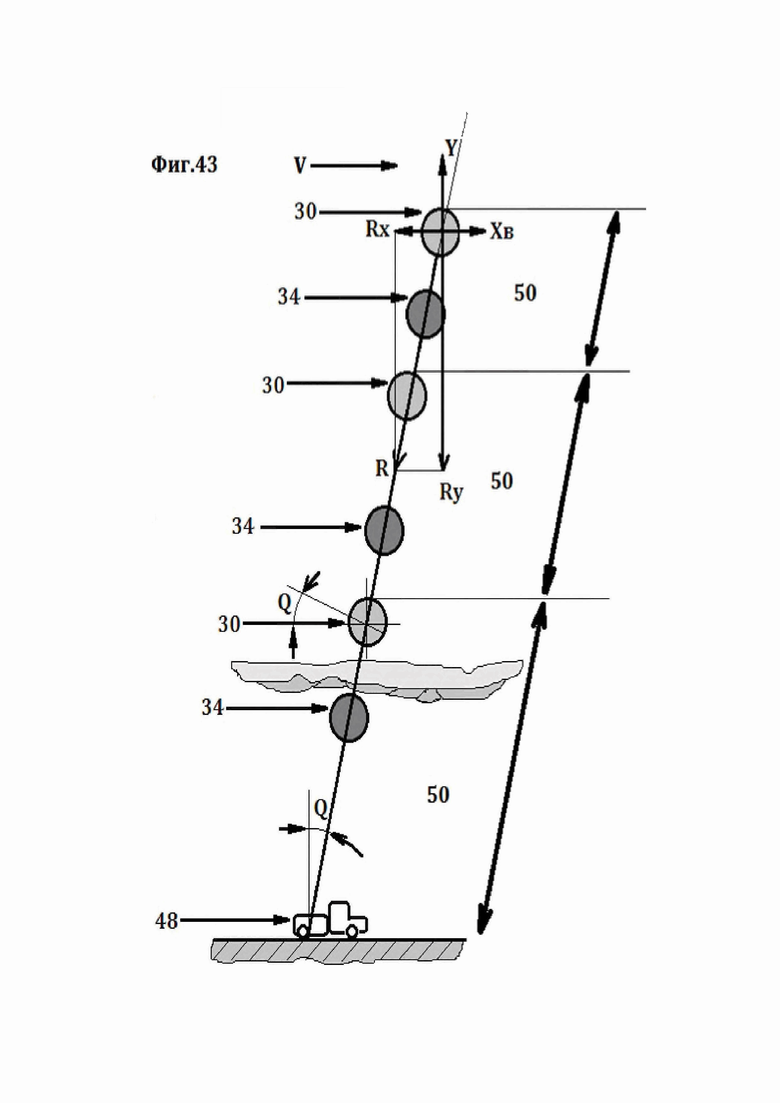
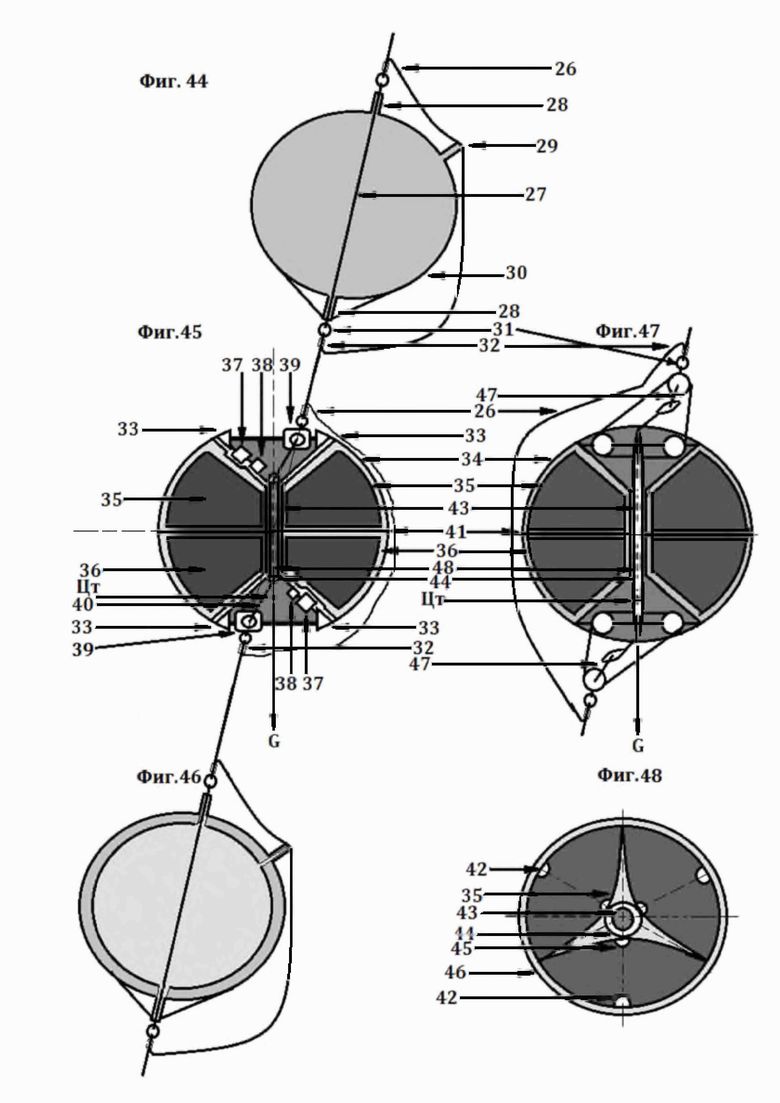

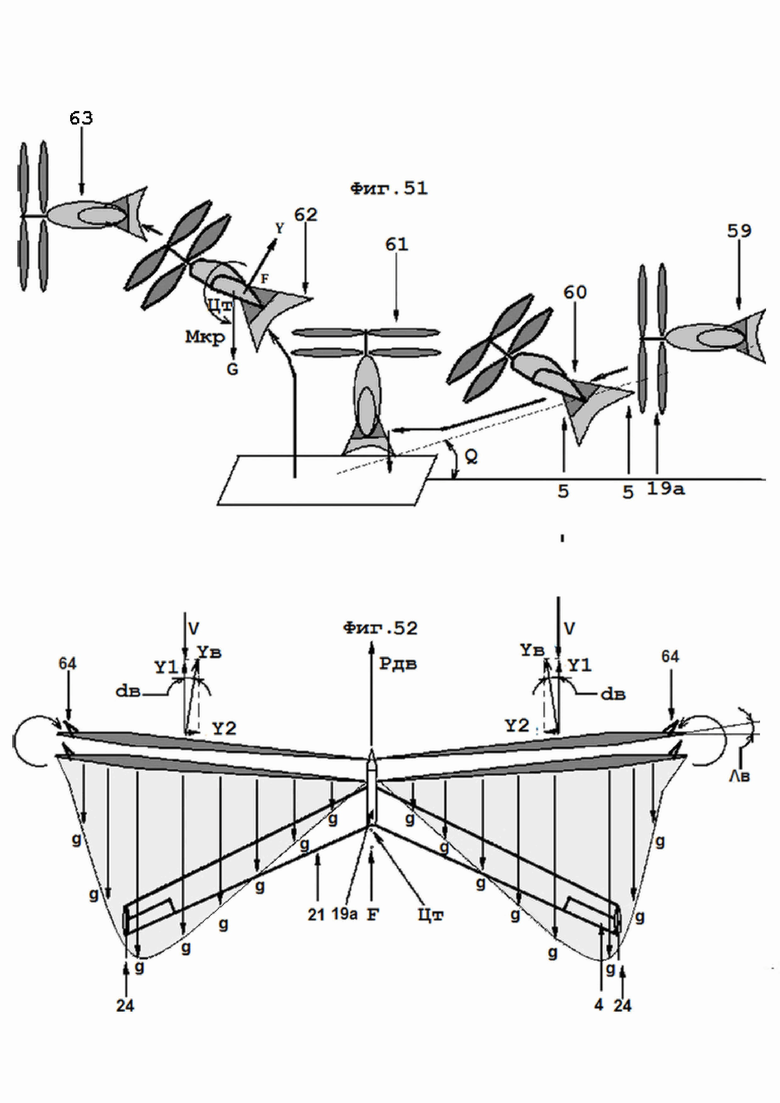
Изобретение относится к подготовке дистанционных боевых действий. Способ подготовки дистанционных боевых действий, заключающийся в том, что изготавливают одноразовые и многоразовые летательные аппараты с поперечным V-образным крылом разных углов стреловидности, средства поражения с боевыми частями и системы радиотехнических модулей, закрепленные к основному тросу и поднятые на высоту шарами воздушных модулей. Одноразовые и многоразовые летательные аппараты изготавливают в виде монопланов, многопланов, многопланов коробчатого типа с крыльями большого удлинения, фиксированной или изменяемой стреловидности, с килями, элевонами и рулями направления преимущественно на концах крыльев. Изготавливают беспилотные летательные аппараты, содержащие армированную обрешетку из неметаллической арматуры и силовые элементы, при этом связующее изготавливают литьем из композиционных материалов, находящихся во временном жидком состоянии, в пресс-формы под давлением, с предварительно нагруженными и установленными там упомянутыми армированной обрешеткой и силовыми элементами, при этом в одноразовых вариантах исполнения упомянутых аппаратов, а также в боевых частях средств поражения в качестве связующего используют при изготовлении расплавленное взрывчатое вещество. Системы радиотехнических модулей размещают по периметру боевых действий, при этом воздушные и радиотехнические модули устанавливают на разных высотах, электрические кабели подвешивают быстросъемными хомутами на основной трос таким образом, чтобы подъемная сила каждого воздушного модуля незначительно превышала суммарную весовую нагрузку на участке троса до следующего воздушного модуля. В результате за счет обеспечения малозаметности летательных аппаратов и сокращения времени их нахождения в зоне поражения средств ПВО повышается эффективность ведения боевых действий. 9 з.п. ф-лы, 52 ил.
1. Способ подготовки дистанционных боевых действий, заключающийся в том, что изготавливают
одноразовые и многоразовые летательные аппараты с поперечным V-образным крылом разных углов стреловидности,
средства поражения с боевыми частями и системы радиотехнических модулей, закрепленные к основному тросу и поднятые на высоту шарами воздушных модулей;
отличающийся тем, что
одноразовые и многоразовые летательные аппараты изготавливают в виде монопланов, многопланов, многопланов коробчатого типа с крыльями большого удлинения, фиксированной или изменяемой стреловидности, с килями, элевонами и рулями направления преимущественно на концах крыльев,
изготавливают беспилотные летательные аппараты, содержащие армированную обрешетку из неметаллической арматуры и силовые элементы, при этом связующее изготавливают литьем из композиционных материалов, находящихся во временном жидком состоянии, в пресс-формы под давлением, с предварительно нагруженными и установленными там упомянутыми армированной обрешеткой и силовыми элементами, при этом в одноразовых вариантах исполнения упомянутых аппаратов, а также в боевых частях средств поражения в качестве связующего используют при изготовлении расплавленное взрывчатое вещество,
системы радиотехнических модулей размещают по периметру боевых действий, при этом воздушные и радиотехнические модули устанавливают на разных высотах, электрические кабели подвешивают быстросъемными хомутами на основной трос таким образом, чтобы подъемная сила каждого воздушного модуля незначительно превышала суммарную весовую нагрузку на участке троса до следующего воздушного модуля.
2. Способ по п.1, отличающийся тем, что в связующее вещество при изготовлении летательных аппаратов добавляют материалы, способные поглотить и пропустить через себя радиоволны радиостанций.
3. Способ по п.1, отличающийся тем, что стреловидность крыльев летательных аппаратов, в том числе и коробчатого типа многопланов, меняют поворотными килями, рулями направления, расположенными на концах крыльев, используя силу набегающего воздушного потока при около нулевой перегрузке.
4. Способ по п.3, отличающийся тем, что в качестве средств поражения используют крылатые ракеты наземного, корабельного и воздушного запуска, которые используют разделяющиеся боевые части с крыльями изменяемой и фиксированной стреловидности.
5. Способ по п.1, отличающийся тем, что для повышения устойчивости по крену и скольжению летательных аппаратов используют отрицательные углы установки стреловидности винтов, загнутые вперед законцовки винтов.
6. Способ по п.1, отличающийся тем, что летательные аппараты монопланы и многопланы вертикального взлета и посадки осуществляют быстрый отрыв от земли с учетом силы ветра, преимущественно после выхода двигателей на взлетный режим, при этом используют жесткий, соосный, большого удлинения, винт с диаметром, большим, чем размах крыльев, где элевоны, кили и рули направления попадают в зону самого интенсивного обдува воздушными потоками от винтов, а упомянутые аппараты с реактивными двигателями на взлете и посадке используют отклоняемые сопла для управления векторами тяги двигателей вблизи центра тяжести летательного аппарата.
7. Способ по п. 1, отличающийся тем, что система управления для всех летательных аппаратов имеет единый стандарт, когда изменение величин угловых скоростей движения имеет одинаковую зависимость от размеров отклонений ручек управления, независимо от скоростей и высот полета, при этом максимальные отклонения ручек управления не должны приводить к превышению эксплуатационных диапазонов углов атак и скольжений.
8. Способ по п.1, отличающийся тем, что радиостанции летательных аппаратов и наземные, радиосвязные модули радиотехнических систем используют узконаправленные антенны, ведущие ретрансляцию и взаимный обмен информации преимущественно сжатыми пакетами в заданных пределах вертикальных, курсовых и азимутальных углов, и имеют систему автоматического или ручного изменения направления точной подстройки приемо-передающих антенн на заданные азимутальные и вертикальные углы направлений на радиостанции, с одновременным изменением частоты приема-передачи радиоволн.
9. Способ по п.1, отличающийся тем, что электродвигатели соосных винтов летательных аппаратов, радиотехнических модулей используют два ротора, которые создают крутящие моменты относительно друг друга для передачи их лопастям и антенным системам, за счет передачи энергии от статорной генераторной обмотки, обмоткам упомянутых роторов в виде переменного или постоянного электрического тока.
10. Способ по п.8, отличающийся тем, что обзорный пеленгаторный модуль имеет две системы из нескольких антенн, вращающихся в разные стороны, разделенных перегородкой.
| Способ противодействия выполнению задач беспилотному летательному аппарату | 2018 |
|
RU2679377C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| Торпеда (варианты) | 2014 |
|
RU2606267C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ АЭРОДИНАМИЧЕСКАЯ РАСПРЕДЕЛЁННАЯ СИСТЕМА | 2018 |
|
RU2742495C2 |
| ИЗОЛЯЦИОННАЯ ПАНЕЛЬ НА ОСНОВЕ МЕХАНИЧЕСКИ УСИЛЕННОГО ПЕНОМАТЕРИАЛА И СПОСОБЫ ЕЕ ИЗГОТОВЛЕНИЯ | 2017 |
|
RU2741573C2 |
| JP H03139498 A, 13.06.1991. | |||

