Настоящее изобретение относится к механизму управления элементом механизации крыла, в частности закрылком, предназначенному для регулирования положения установленных на крыле убираемых и выпускаемых элементов его механизации.
Под элементами механизации крыла в контексте настоящего изобретения подразумеваются щитки, закрылки или иные аналогичные элементы на пилотируемом или беспилотном самолете, которые за счет их конструкции оказывают влияние на подъемную силу. Подобные элементы механизации крыла могут представлять собой элементы, создающие большой прирост подъемной силы, такие, например, как предкрылки или закрылки транспортного или пассажирского самолета, или же триммеры, аэродинамические тормоза или рулевые поверхности любого типа.
Подобный механизм управления элементом механизации крыла известен по его применению на самолете типа "Airbus A340". В таком механизме каждый из закрепленных на крыле держателей элемента механизации крыла снабжен дорожкой качения или направляющей, обеспечивающей квазипрямолинейное направленное перемещение элемента механизации крыла при регулировании его положения и восприятие основной нагрузки, воздействующей на этот элемент механизации крыла. С этой целью на элементе механизации крыла закреплены роликовые каретки со стальными роликами, каждый из которых перемещается по соответствующей дорожке качения, ограниченной направляющей полкой или планкой. Для изменения или регулирования углового положения элемента механизации крыла в зависимости от положения роликовой каретки на некотором расстоянии от нее предусмотрен шарнирный рычаг, который на некотором расстоянии от этой роликовой каретки соединяет элемент механизации крыла с одним из его держателей. При этом положение элемента механизации крыла регулируется вращательным сервоприводом, который приводными рычагами соединен с этим элементом механизации крыла.
Недостаток подобного механизма управления элементом механизации крыла состоит в том, что направляющие полки или планки воспринимают исключительно высокую нагрузку, передаваемую на них со стороны стальных роликов, и в результате работают на изгиб, и поэтому их приходится изготавливать достаточно большой толщины. При этом, как очевидно, увеличение толщины тех или иных элементов конструкции неизбежно ведет и к увеличению массы всей конструкции крыла, что нежелательно для крыльев прежде всего очень больших размеров.
Исходя из вышеизложенного в основу настоящего изобретения была положена задача разработать механизм управления элементом механизации крыла, который обеспечивал бы квазипрямолинейное направленное перемещение элемента механизации крыла при одновременном снижении его массы.
Указанная задача решается с помощью отличительных признаков, представленных в п.1 формулы изобретения. Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы.
В предлагаемом в изобретении механизме управления элементом механизации крыла для восприятия нагрузок и для обеспечения направленного перемещения элемента механизации крыла по заданной кинематической схеме предусмотрены основной соединительный механизм и расположенный на некотором расстоянии от него, если смотреть в направлении потока, вспомогательный соединительный механизм в виде направляющего рычага, шарнирно соединенного с элементом механизации крыла и держателем элемента механизации крыла, при этом основной соединительный механизм имеет рычажную систему по меньшей мере с одним поворотным рычагом, который имеет первый шарнир и второй шарнир, причем указанный по меньшей мере один поворотный рычаг соединен с держателем элемента механизации крыла маятниковым или качающимся рычагом, присоединенным к первому шарниру поворотного рычага, а второй шарнир поворотного рычага имеет возможность направленного перемещения таким образом, чтобы определенному угловому положению по меньшей мере одного поворотного рычага соответствовали однозначно или строго определенные положения шарнира основного соединительного механизма и шарнира вспомогательного соединительного механизма. Направленное перемещение второго шарнира поворотного рычага можно обеспечить различными путями в соответствии с различными предлагаемыми в изобретении вариантами его осуществления.
Преимущество предлагаемого в изобретении механизма управления элементом механизации крыла состоит в возможности по существу полностью отказаться от применения роликов для передачи основных нагрузок, что позволяет уменьшить массу такого механизма управления элементом механизации крыла по сравнению с известными из уровня техники механизмами.
Еще одно преимущество изобретения состоит в возможности придать траектории перемещения элемента механизации крыла при его выпуске или уборке любую из множества возможных форм.
Ниже изобретение более подробно рассмотрено со ссылкой на прилагаемые чертежи, на которых показано:
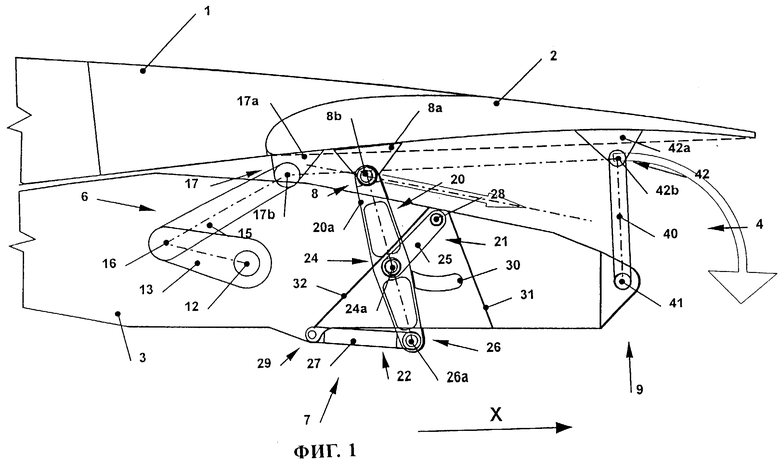
на фиг.1 - продольный разрез задней, если смотреть в направлении потока, части крыла с закрылком и предлагаемым в изобретении механизмом управления им, выполненным по первому варианту, с первым вариантом выполнения рычажной системы, при этом закрылок показан в убранном положении,
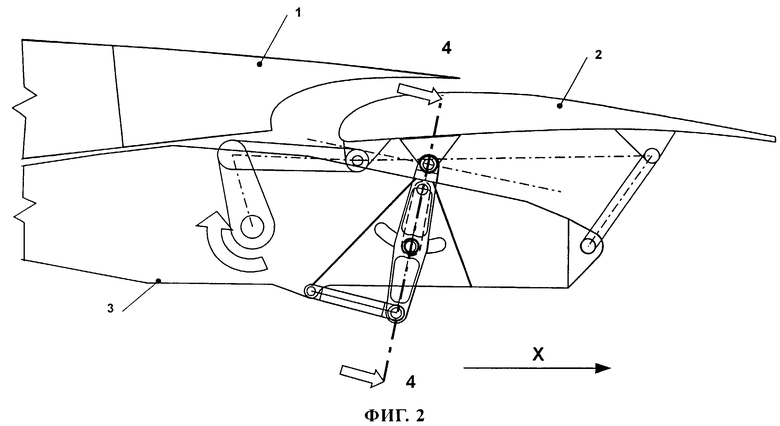
на фиг.2 - продольный разрез показанной на фиг.1 задней части крыла, при этом закрылок находится в промежуточном или частично выпущенном положении,
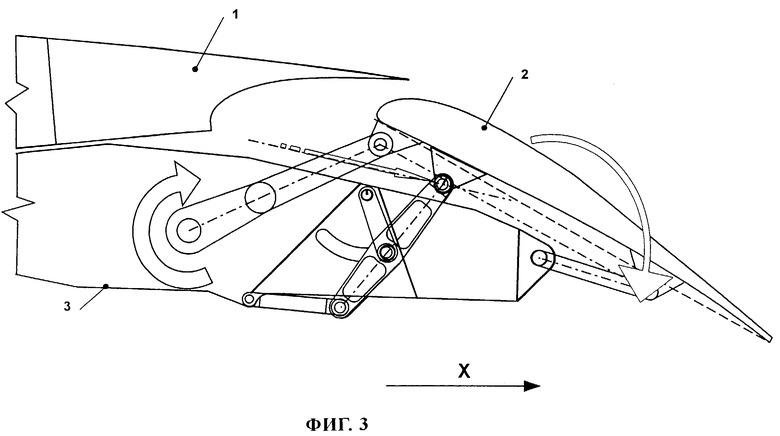
на фиг.3 - продольный разрез показанной на фиг.1 задней части крыла, при этом закрылок находится в полностью выпущенном положении,
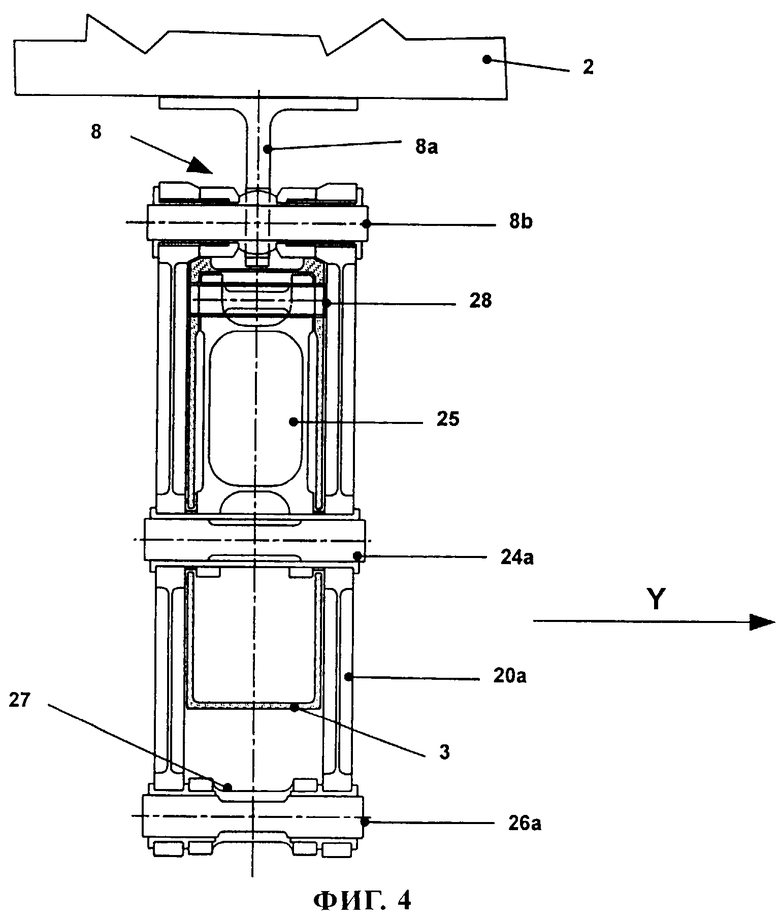
на фиг.4 - сечение плоскостью 4-4 по фиг.2,
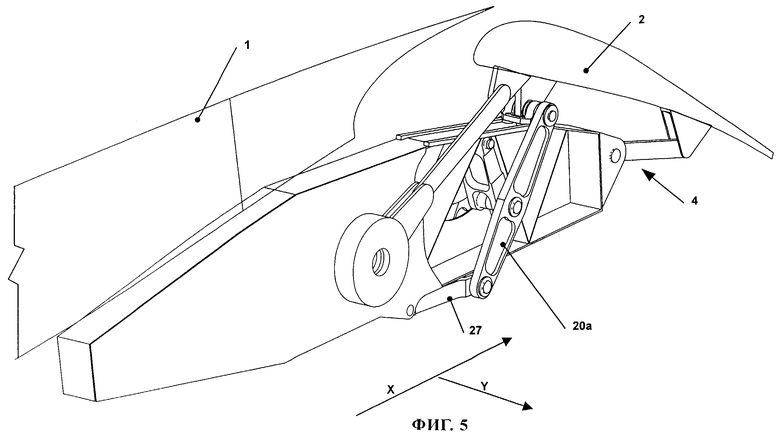
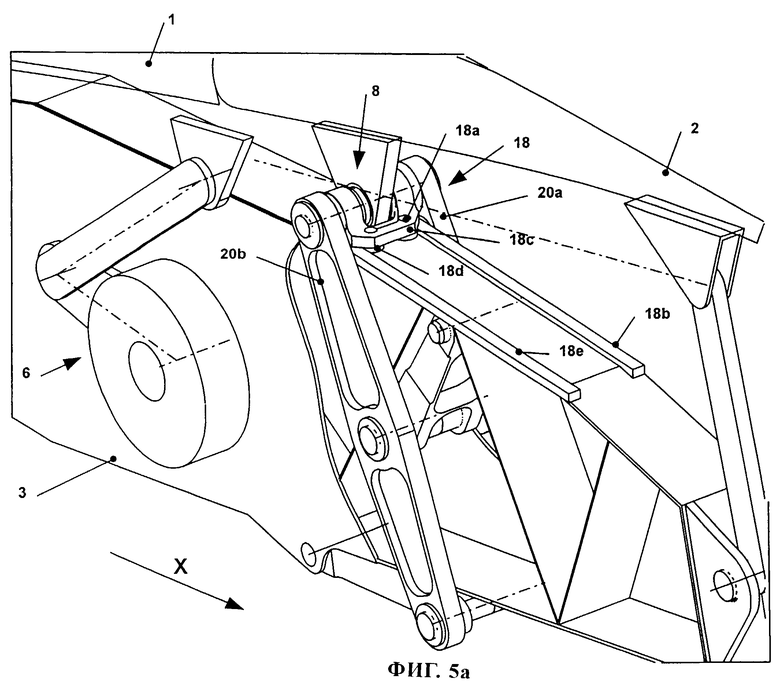
на фиг.5 и 5а - общий вид в перспективе предлагаемого в изобретении механизма управления закрылком, показанного на фиг.3,
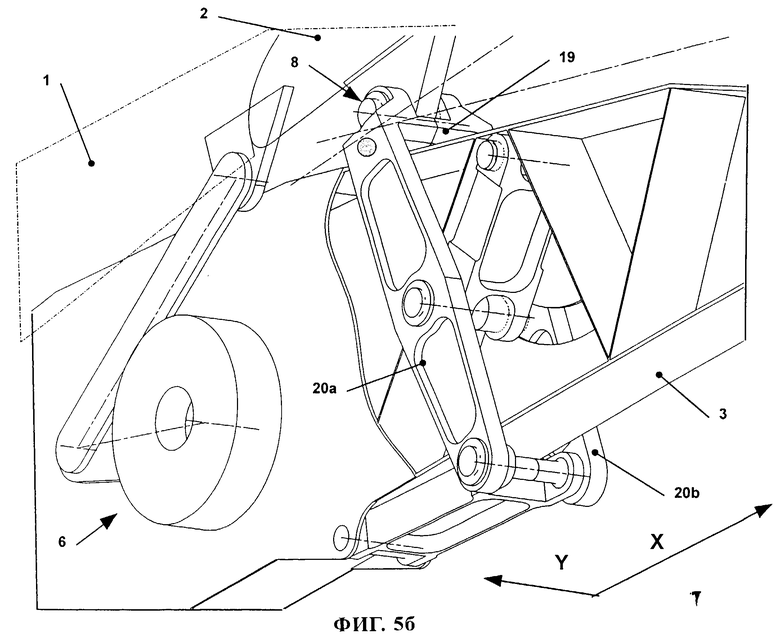
на фиг.5 - общий вид в перспективе показанного на фиг.1 предлагаемого в изобретении механизма управления закрылком со вторым вариантом выполнения рычажной системы, при этом закрылок изображен в убранном положении,
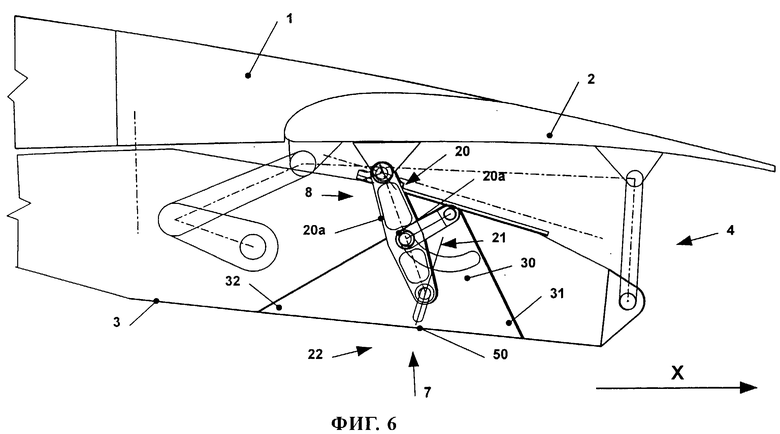
на фиг.6 - продольный разрез задней, если смотреть в направлении потока, части крыла с закрылком и предлагаемым в изобретении механизма управления им, выполненным по другому варианту, с первым вариантом выполнения рычажной системы, при этом закрылок показан в убранном положении,
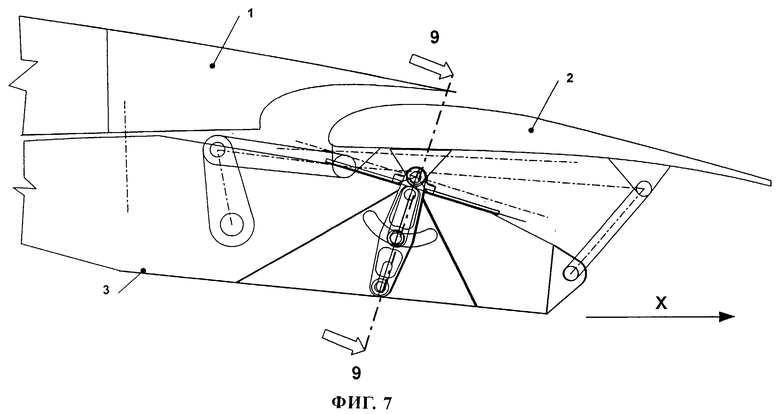
на фиг.7 - продольный разрез показанной на фиг.6 задней части крыла, закрылок которого показан в промежуточном или частично выпущенном положении,
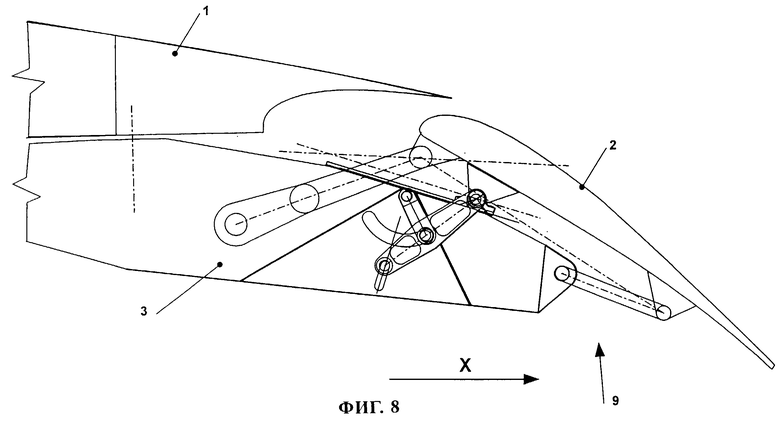
на фиг.8 - продольный разрез показанной на фиг.6 задней части крыла, закрылок которого показан в полностью выпущенном положении,
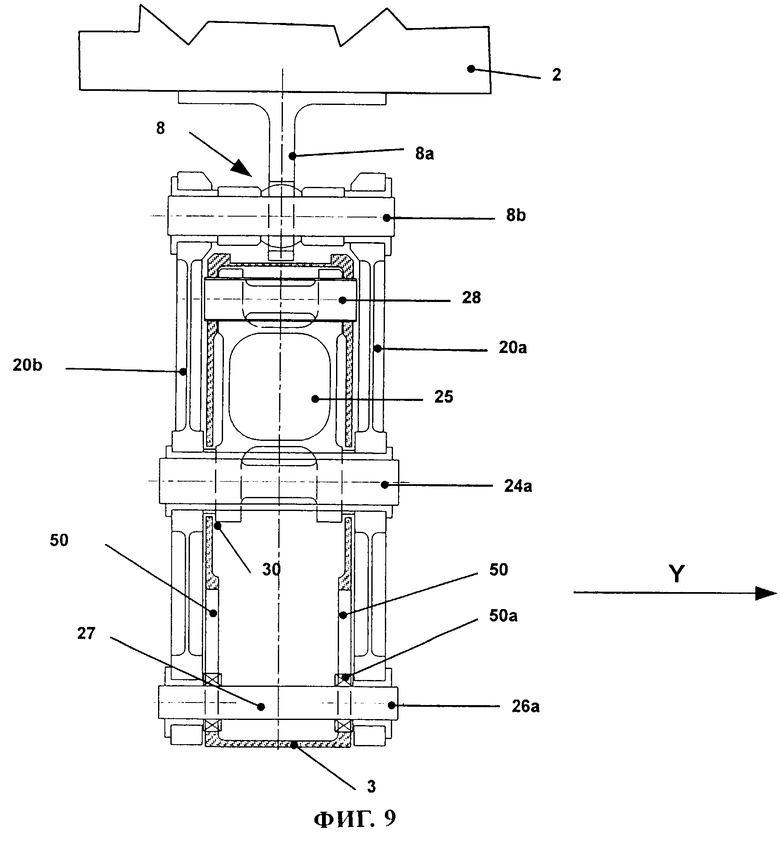
на фиг.9 - сечение плоскостью 9-9 по фиг.7,
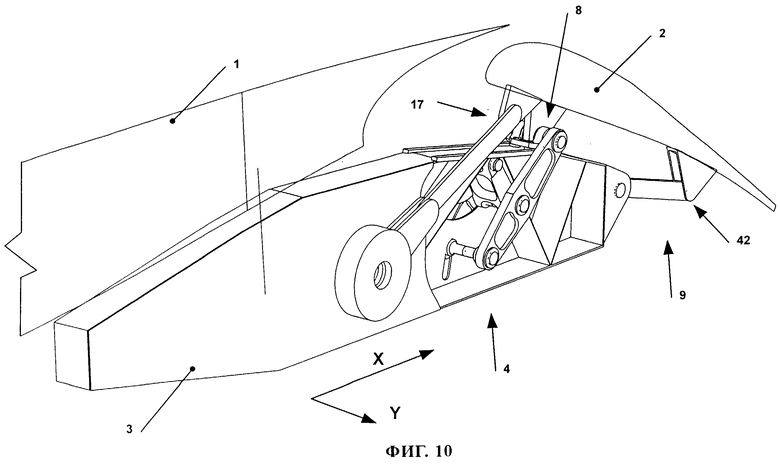
на фиг.10 - вид в перспективе предлагаемого в изобретении механизма управления закрылка, показанного на фиг.6,
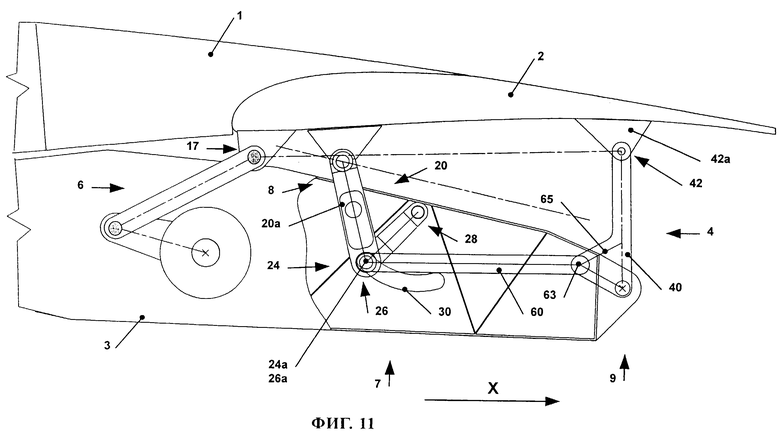
на фиг.11 - продольный разрез задней, если смотреть в направлении потока, части крыла с показанным в убранном положении закрылком и предлагаемым в изобретении механизмом управления им, выполненным по третьему варианту,
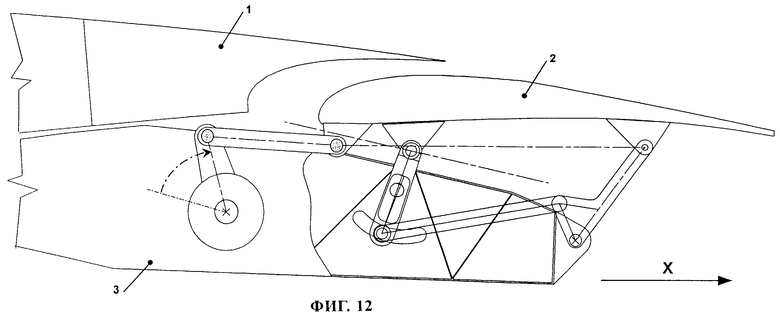
на фиг.12 - продольный разрез показанной на фиг.11 задней части крыла, закрылок которого находится в промежуточном или частично выпущенном положении,
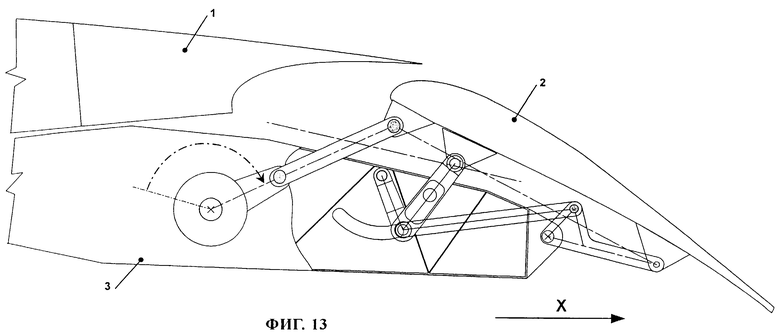
на фиг.13 - продольный разрез показанной на фиг.11 задней части крыла, закрылок которого находится в полностью выпущенном положении, и
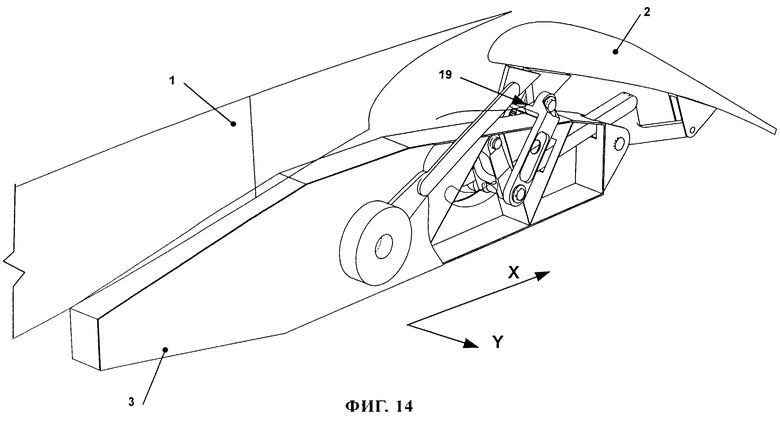
на фиг.14 - вид в перспективе показанного на фиг.11 предлагаемого в изобретении механизма управления закрылком.
В последующем описании все элементы, выполняющие одинаковую функцию, названы одинаковыми терминами и обозначены на чертежах одинаковыми позициями.
На чертежах показана задняя, если смотреть в направлении потока Х (фиг.1), часть крыла или каркаса 1 крыла самолета с закрылком 2, который является примером элемента механизации крыла и положение которого регулируется с помощью по меньшей мере одного смонтированного на его держателе 3 механизма 4 управления закрылком. С этой целью на держателе 3 закрылка (или в более общем случае на держателе элемента механизации крыла) смонтирована также приводная система 6, предназначенная для создания перестановочных усилий, передаваемых на элемент механизации крыла, т.е. в данном случае на закрылок 2. В состав предлагаемого в изобретении механизма 4 управления закрылком или в более общем случае управления элементом механизации крыла входит также основной соединительный механизм 7 и задний соединительный механизм 9, при этом основной соединительный механизм 7 служит для восприятия основных весовых нагрузок и действующих на закрылок 2 аэродинамических нагрузок, а задний соединительный механизм 9 во взаимодействии с основным соединительным механизмом 7 служит для направленного перемещения закрылка 2 по заданной кинематической схеме.
Обычно крыло, для применения в котором предназначено предлагаемое в изобретении решение, имеет несколько последовательно расположенных, если смотреть в направлении Y его размаха, держателей 3 закрылка, каждый из которых предпочтительно снабжен предлагаемым в изобретении механизмом 4 управления закрылком. Однако в любом случае крыло снабжено по меньшей мере одним держателем 3 закрылка, оснащенным предлагаемым в изобретении механизмом 4 управления закрылком. Такой механизм 4 управления закрылком можно также использовать в сочетании с другими известными из уровня техники механизмами управления элементами механизации крыла и, в частности, закрылками. В предпочтительном варианте осуществления изобретения крыло оснащают по меньшей мере двумя держателями 3 закрылка, каждый из которых снабжен предлагаемым в изобретении механизмом 4 управления закрылком.
Согласно еще одному предпочтительному варианту осуществления изобретения для крепления и регулирования положения элемента механизации крыла можно также использовать только один расположенный на его держателе предлагаемый в изобретении механизм управления, при этом для крепления элемента механизации крыла в другой точке можно дополнительно использовать еще один, известный из уровня техники механизм управления или же использовать поворотный узел крепления со сферическим шарниром.
Ниже изобретение более подробно рассмотрено на примере одного из предпочтительно нескольких держателей 3 закрылка. При этом сначала рассмотрен первый вариант осуществления изобретения, показанный на фиг.1-5.
Приводная система 6, которая предпочтительно расположена в передней, если смотреть в направлении потока Х или в продольном направлении крыла, части закрылка 2 выполнена в соответствии с уровнем техники и может иметь различное конструктивное исполнение. В одном из предпочтительных вариантов эта приводная система образована вращательным сервоприводом 11 с приводной или ведущей осью 12, а также приводимой в движение этой ведущей осью комбинацией из приводного коромысла 13 и приводного шатуна 15, которые соединены между собой вращательным шарниром 16. Приводное усилие передается от приводного шатуна 15 через шарнир 17 приводной системы и через относящуюся к нему ось 17b приводной системы на предусмотренную у закрылка 2 проушину 17а, которая предпочтительно расположена в передней его части. При срабатывании сервопривода 11 его приводное усилие, развиваемое на его ведущей оси 12, передается от нее через приводное коромысло 13 и приводной шатун 15 на приводную проушину 17а, что сопровождается перемещением закрылка 2 или изменением его положения.
В показанных на фиг.1-14 вариантах основной соединительный механизм 7 расположен перед, если смотреть в направлении потока X, вспомогательным соединительным механизмом 9. Однако в принципе основной соединительный механизм 7 можно располагать и позади вспомогательного соединительного механизма 9. Приводное усилие, развиваемое основным соединительным механизмом 7, передается с помощью рычажной системы 20 на его шарнир 8 и далее на его проушину 8а на закрылке 2, взаимодействующую с основной осью 8b. В первом варианте выполнения, показанном на фиг.1-5, а также в показанном на фиг.6-10 варианте эта рычажная система состоит из двух качающихся или поворотных рычагов 20а, 20b (фиг.5). В первом варианте выполнения рычажной системы 20 ее поворотные рычаги 20а, 20b расположены по бокам держателя 3 закрылка, который (держатель) тем самым расположен между этими поворотными рычагами 20а, 20b. При этом поворотные рычаги 20а, 20b в каждой их паре соединены между собой проходящей между ними основной осью 8b, которая установлена в проушине 8а шарнира 8 основного соединительного механизма с опорой предпочтительно на сферическую опору. Вместе с тем эту опору можно также выполнить в виде цилиндрической (осевой) опоры. Помимо этого в рычажной системы 20 можно предусмотреть и более двух поворотных рычагов.
Альтернативно этому рычажная система 20 может быть также образована согласно второму варианту ее выполнения одним поворотным рычагом, который может располагаться в пространстве между боковыми сторонами держателя 3 закрылка или сбоку от этого держателя. В общем же случае в рычажной системе 20 предусмотрен по меньшей мере один такой поворотный рычаг.
Рычажная система 20 вне зависимости от того, образована ли она одним или же несколькими поворотными рычагами, может иметь для ее направленного перемещения вдоль держателя 3 закрылка направляющее устройство 18 (фиг.1-5, 5а, 6-10), расположенное в зоне шарнира основного соединительного механизма, либо может не иметь такого направляющего устройства на держателе 3 закрылка (фиг.5б, 11-14). В последнем случае при использовании двух или более поворотных рычагов 20а, 20b они соединены между собой скобой 19, расположенной с некоторым отступом от держателя 3 закрылка в зоне шарнира 8 основного соединительного механизма (фиг.5б, фиг.11-14). При этом поворотные рычаги могут быть выполнены за одно целое с этой скобой 19 либо могут быть соединены с ней соответствующим соединительным узлом.
Направляющее устройство 18 имеет выполненную на поворотном рычаге направляющую 18а и выполненную на держателе закрылка направляющую 18b и может служить опорой для рычажной системы 20 в направлении Х или же в направлении Y. Конкретное конструктивное исполнение направляющего устройства 18 соответствует известному из уровня техники, при этом выполненная на поворотном рычаге направляющая 18а выполнена предпочтительно в виде каретки 18с с одним или несколькими роликами 18d, взаимодействующими с планкой 18е, выполненной на держателе закрылка направляющей 18b.
Для направленного перемещения по меньшей мере одного имеющегося в рычажной системе 20 поворотного рычага предусмотрены расположенные сбоку держателя 3 закрылка первый 21 и второй 22 направляющие механизмы. Эти первый 21 и второй 22 направляющие механизмы в их взаимодействии обеспечивают при наклоне по меньшей мере одного поворотного рычага на определенный угол установку шарнира 8 основного соединительного механизма в строго определенное положение.
Первый направляющий 21 механизм поворотного рычага имеет первый шарнир 24, к которому присоединен маятниковый или качающийся рычаг 25, соединенный с держателем 3 закрылка. Второй направляющий 22 механизм поворотного рычага имеет второй шарнир 26, который расположен по меньшей мере в одном из поворотных рычагов. Шарниры 24, 26 имеются в каждом предусмотренном в рычажной системе поворотном рычаге, т.е. в данном случае в каждом из поворотных рычагов 20а, 20b. Первый шарнир 24 имеет ось или качающуюся ось 24а, которая при использовании в каждой рычажной системе 20 двух или более поворотных рычагов соединяет их между собой. Качающийся рычаг 25 крепится к держателю 3 закрылка с помощью шарнира 28. Тем самым этот качающийся рычаг 25 соединяет держатель 3 закрылка по меньшей мере с одним относящимся к рычажной системе 20 поворотным рычагом, вследствие чего первый шарнир 24, соответственно ось 24а перемещаются по круговой траектории.
Второй направляющий механизм 22 вместе с его вторым шарниром 26 может иметь различное конструктивное исполнение. В первом варианте его выполнения, показанном на фиг.1-5, второй шарнир 26 расположен по меньшей мере на одном поворотном рычаге 20а, 20b с некоторым отступом, если смотреть в продольном направлении по меньшей мере одного такого поворотного рычага, от первого шарнира 24. В этом варианте второй шарнир 26 распоркой 27, которая опирается на ось 26а во втором шарнире 26, соединен с расположенным на держателе 3 закрылка шарниром 29. Второй шарнир 26 в показанном на фиг.1-5 варианте расположен на противоположном шарниру 8 основного соединительного механизма конце рычажной системы. Распорка 27 в зависимости от требуемой траектории выпуска закрылка может быть шарнирно присоединена и в другом месте рычажной системы, в частности к первому шарниру 24.
Поскольку ось 24а первого шарнира 24, если каждая рычажная система состоит из двух или более поворотных рычагов, соединяет между собой несколько поворотных рычагов и проходит между ними, в держателе 3 закрылка при необходимости предусмотрено отверстие или прорезь 30, сквозь которое, соответственно сквозь которую, проходит эта качающаяся ось 24а. Такое отверстие не требуется в том случае, если качающаяся ось 24а расположена сбоку от соответствующего держателя 3 закрылка. Кроме того, держатель 3 закрылка может иметь одно или несколько ребер 31, 32 жесткости, которые позволяют придать этому держателю 3 закрылка оптимальную с точки зрения распределения весовой нагрузки, соответственно силового потока конструкцию.
Вспомогательный соединительный механизм 9 вместе с его шарниром 42 расположен на том участке закрылка 2, который находится позади, если смотреть в направлении потока X, шарнира 8 основного соединительного механизма на некотором расстоянии от этого шарнира. Шарнир 8 основного соединительного механизма может также располагаться, если смотреть в направлении потока X, перед или за шарниром 42 вспомогательного соединительного механизма. Благодаря взаимно согласованному перемещению звеньев основного соединительного механизма 7 и вспомогательного соединительного механизма 9 установка шарнира 17 приводной системы в определенное положение сопровождается установкой шарнира 42 вспомогательного соединительного механизма также в определенное, однозначно заданное положение.
Вспомогательный соединительный механизм 9 имеет направляющий рычаг 40, который, в свою очередь, с одного конца соединен с расположенным на держателе 3 закрылка направляющим или стационарным шарниром 41, а с другого конца соединен с расположенным на закрылке шарниром 42. Этот шарнир 42 вспомогательного соединительного механизма в предпочтительном варианте имеет ось 42b, вставленную в расположенную на закрылке 2 проушину 42а вспомогательного соединительного механизма. Шарнир 42 в зависимости от варианта выполнения механизма управления закрылком, соответственно в зависимости от требуемой подвижности закрылка 2, может быть выполнен в виде сферического шарнира либо в виде цилиндрического шарнира, имеющего возможность поворота только вокруг его продольной оси.
В показанных на чертежах вариантах вспомогательный соединительный механизм 9 располагается за, если смотреть в направлении потока X, основным соединительным механизмом 7. Однако согласно изобретению эти механизмы 7, 9 можно также располагать и в обратном порядке друг относительно друга.
Ниже со ссылкой на фиг.1-3 рассмотрен принцип работы предлагаемого в изобретении механизма 4 управления закрылком, выполненного в соответствии с вариантом, показанным на фиг.1-5. На фиг.1 закрылок 2, приводимый в действие механизмом 4 управления им, показан в убранном положении. Для перемещения закрылка 2 в выпущенное положение в действие приводится приводная система 6, развивающая необходимое усилие для перемещения закрылка в другое положение. Пространственная ориентация закрылка в каждом из его положений задается основным соединительным механизмом 7 и вспомогательным соединительным механизмом 9, которые за счет их предлагаемого в изобретении конструктивного исполнения можно взаимно согласовать таким образом, чтобы обеспечить согласно предпочтительному варианту квазипрямолинейное перемещение закрылка 2. Однако с помощью предлагаемого в изобретении механизма 4 управления закрылком можно реализовать его движение и по иным траекториям. Вспомогательный соединительный механизм 9 позволяет компенсировать создаваемый закрылком 2 момент тангажа, возникающий под действием силы тяжести закрылка, а также действующих на него внешних сил. На фиг.2 закрылок 2 показан в промежуточном, частично выпущенном положении, а на фиг.3 закрылок 2 изображен в полностью выпущенном положении.
Ниже со ссылкой на фиг.6-10 более подробно рассмотрен следующий - второй - вариант выполнения основного соединительного механизма 7, при этом вспомогательный соединительный механизм 9 конструктивно не отличается от показанного на фиг.1-5 механизма. Основной соединительный механизм 7 во втором варианте его выполнения имеет рычажную систему 20, образованную по меньшей мере одним поворотным рычагом. В показанном на фиг.6-10 варианте рычажная система 20 имеет два поворотных рычага 20а, 20b, которые по одному расположены с противоположных сторон держателя 3 закрылка. С учетом этого ось 24а, с которой шарнирно соединен качающийся рычаг 25, проходит через соответствующее отверстие 30, предусмотренное в держателе 3 закрылка. В отличие от первого варианта выполнения основного соединительного механизма 7 во втором варианте его выполнения в направляющем механизме 22 предусмотрена выполненная в держателе 3 закрылка направляющая прорезь 50, обеспечивающая направленное перемещение, предпочтительно с помощью роликов 50а, установленной во втором шарнире 26 оси 26а. Этой направляющей прорезью определяется кинематическая подвижность того конца рычажной системы 20, соответственно по меньшей мере одного поворотного рычага 20а, соответственно 20b, который расположен с противоположной шарниру 8 основного соединительного механизма стороны. Тем самым за счет взаимно согласованного перемещения звеньев первого 21 и второго 22 направляющих механизмов, управляющих перемещением поворотных рычагов, углом наклона или угловым положением рычажной системы 20 задается однозначно определенное положение шарнира 8 основного соединительного механизма.
Принцип работы предлагаемого в изобретении механизма 4 управления закрылком с выполненным по второму варианту основным соединительным механизмом 7 аналогичен принципу работы механизма управления закрылком с выполненным по первому варианту основным соединительным механизмом и проиллюстрирован на фиг.6-8, где закрылок 2 показан в трех различных его положениях. На фиг.6 механизм 4 управления закрылком 2 показан в состоянии, в котором последний находится в полностью убранном положении. На фиг.7 механизм 4 управления закрылком 2 показан в состоянии, соответствующем промежуточному, частично выпущенному положению этого закрылка, а на фиг.8 закрылок показан в полностью выпущенном положении.
Приводной системой 6 согласно изобретению задается положение ее шарнира 17, но не пространственная ориентация закрылка 2 в зависимости от установки его в то или иное выпущенное положение. Однако в другом варианте, альтернативном показанным на фиг.1-10 вариантам конструктивного исполнения приводной системы 6, развиваемые ею усилия можно также, например, непосредственно передавать на один или несколько качающихся или поворотных рычагов рычажной системы 20, т.е. на поворотные рычаги 20а, соответственно 20b, и в этом случае приводное коромысло 13 и приводной шатун 15 будут иметь несколько иное исполнение или будут взаимодействовать со звеньями основного или вспомогательного соединительных механизмов.
Вспомогательный соединительный механизм 9 не обязательно должен быть образован рычажным механизмом, как это показано на фиг.1-10. Вместо этого направленное перемещение закрылка можно также обеспечить и иным образом, например, с помощью направляющей.
В другом варианте осуществления изобретения, показанном на фиг.11-14, между основным соединительным механизмом 7 и вспомогательным соединительным механизмом 9 предусмотрена механическая связь, которая позволяет для определенного углового положения или ориентации рычажной системы 20 задавать однозначно определенное положение шарнира 8 основного соединительного механизма и шарнира 42 вспомогательного соединительного механизма.
В этом варианте ко второму шарниру 26 шарнирно присоединена соединительная распорка 60, которая механически соединяет рычажную систему 20, соответственно по меньшей мере один ее поворотный рычаг 20а, 20b с направляющим рычагом 40. С этой целью на направляющем рычаге 40 предусмотрен соединительный шарнир 63, обеспечивающий шарнирное крепление рычажной системы 20 к этому направляющему рычагу 40. Соединительная распорка 60 может быть присоединена по меньшей мере к одному поворотному рычагу и в другом его месте или к его продолжению либо может быть также присоединена к качающемуся рычагу 25. Точкой расположения опоры соединительной распорки или ее шарнирного соединения с рычажной системой определяется траектория перемещения закрылка при его выпуске, и поэтому варьированием места расположения опоры соединительной распорки или ее шарнирного соединения с рычажной системой, а также варьированием соотношения между размерами звеньев механизма управления закрылком траектории перемещения закрылка при его выпуске, соответственно уборке можно придать любую из множества возможных форм.
Положение соединительного шарнира 63 на направляющем рычаге 40, а также положение второго шарнира 26 по меньшей мере на одном поворотном рычаге 20а, 20b зависит от величин эффективной длины основного 7 и вспомогательного 9 соединительных механизмов, а также от требуемой траектории перемещения закрылка 2 при его выпуске или уборке. При этом на направляющем рычаге 40 можно также предусмотреть выступ или консольно вынесенное крепление 65 (см. фиг.11-14) с целью обеспечить требуемое воздействие на закрылок со стороны направляющего рычага 40 в зависимости от его углового положения. Аналогичное консольно вынесенное крепление с этой целью можно предусмотреть и по меньшей мере на одном поворотном рычаге 20а,20b.
Еще одна особенность показанного на фиг.11-14 варианта выполнения основного и вспомогательного соединительных механизмов состоит в том, что второй шарнир 26 расположен в том же самом месте, что и первый шарнир 24. Обеспечивается это за счет совмещения оси 24а первого шарнира 24 с осью 26а второго шарнира 26. Однако в более общем случае второй шарнир 26, к которому присоединена соединительная распорка 60, может располагаться на некотором расстоянии от первого шарнира 24.
Принцип работы рассмотренного выше варианта выполнения механизма управления закрылка аналогичен принципу работы механизма, описанному на примере показанного на фиг.1-5 варианта его выполнения.
Изобретение относится к элементам управления крыла. Механизм 4 управления элементом 2 механизации крыла предназначен для регулирования положения установленного на крыле 1 элемента 2 его механизации с помощью приводной системы 6. Механизм 4 содержит основной соединительный механизм 7 и вспомогательный соединительный механизм 9 в виде направляющего рычага 40, шарнирно соединенного с элементом 2 механизации крыла и держателем 3 элемента механизации крыла. Основной соединительный механизм 7 имеет рычажную систему (20) по меньшей мере с одним поворотным рычагом 20а, 20b, который имеет первый шарнир 24 и второй шарнир 26. Поворотный рычаг 20а, 20b соединен с держателем 3 элемента механизации крыла маятниковым или качающимся рычагом 25, присоединенным к первому шарниру 24 поворотного рычага. Второй шарнир 26 поворотного рычага имеет возможность направленного перемещения таким образом, чтобы определенному угловому положению по меньшей мере одного поворотного рычага 20а, 20b соответствовали определенные положения шарнира 8 основного соединительного механизма и шарнира 42 вспомогательного соединительного механизма. Технический результат – снижение массы. 2 с. и 11 з.п. ф-лы, 14 ил.
| Приспособление к ленточному прессу для предупреждения вращения глины | 1949 |
|
SU81610A1 |

