Область техники, к которой относится изобретение
Изобретение относится к крылу воздушного судна, в частности крылу самолета, и к воздушному судну, снабженному этим крылом.
Уровень техники
Крылья воздушного судна обычно содержат отсек кессона и множество закрылков, таких как посадочные закрылки, которые размещаются на кессоне. При взлете и посадке воздушного судна закрылки выпускаются для того, чтобы увеличить аэродинамическую подъемную силу воздушного судна, поскольку в выпущенном состоянии закрылки увеличивают эффективную кривизну и поверхность крыла.
Предпочтительно, чтобы закрылки прикреплялись к двум опорам и перемещались в требуемое положение посредством механизма перемещения. В качестве примера опоры могут устанавливаться в соответствующем держателе, который прикрепляется к кессону так, чтобы опоры могли поворачиваться относительно оси вращения закрылка относительно кессона. Во время выпуска закрылка механизм перемещения вращает опору, тем самым закрылок относительно этой оси вращения. Воздушное судно имеет измерительное устройство для определения положения закрылка относительно кессона.
Если закрылок прикреплен к множеству опор, то все опоры в целом перемещаются синхронно с соответственным механизмом перемещения. Если один из механизмов неисправен или полностью вышел из строя, то существует риск того, что во время перемещения закрылок может наклониться или искривиться. Это может привести к повреждению закрылка или кессона или к потере закрылка.
В отличие от этого опоры для закрылков воздушного судна, описанные в ЕР 0922633 В1, имеют каретку закрылка, которую во время втягивания и выпуска закрылка механизм перемещения перемещает по дорожке закрылка. Для того чтобы определить положение закрылка по отношению к кессону, этот вариант применения (воздушное судно) имеет измерительное устройство с датчиком (измерительным преобразователем) вращения, которое преобразует поступательное перемещение каретки закрылка во вращательное перемещение датчика вращения.
Раскрытие изобретения
Одна задача изобретения заключается в создании крыла и закрылка, который установлен на кессоне с возможностью поворота относительно оси вращения закрылка таким образом, чтобы положение закрылка по отношению к кессону могло быть определено с помощью относительно простых средств.
Дополнительная задача изобретения заключается в том, чтобы создать такие предварительные условия для воздушного судна, чтобы обеспечить надежное определение любой неисправности механизма перемещения посадочного закрылка.
Задача изобретения решается с помощью крыла воздушного судна, содержащего кессон; опору, установленную по отношению к кессону с возможностью поворота относительно оси вращения закрылка; закрылок, прикрепленный к опоре с возможностью поворота относительно оси вращения закрылка при повороте опоры относительно кессона; механизм перемещения, связанный с опорой, для задания углового положения закрылка относительно кессона; и измерительное устройство для определения углового положения закрылка, причем измерительное устройство имеет датчик вращения, установленный на опоре, и четырехэлементную соединительную передачу, которая связывает датчик поворота с механизмом перемещения.
Механизм перемещения связан с опорой и поворачивает ее по мере необходимости вокруг оси вращения закрылка. Это вызывает поворот закрылка, который прикреплен к опоре и представляет собой, например, посадочный закрылок. Механизм перемещения создает, таким образом, возможность перемещения закрылка в различные положения по отношению к кессону. Эти положения характеризуются различными угловыми положениями относительно кессона, а отдельные угловые положения определяются датчиком вращения измерительного устройства, который прикреплен к опоре. Измерительное устройство также имеет четырехэлементную соединительную передачу, которая связывает датчик вращения с механизмом перемещения, иначе говоря, четырехэлементная соединительная передача, с одной стороны присоединена к датчику вращения, а с другой стороны - к механизму перемещения. Поскольку датчик вращения через четырехэлементную соединительную передачу связан с механизмом перемещения, то механизм перемещения во время перемещения опоры перемещает также датчик вращения таким образом, что его выходной сигнал является мерой углового положения закрылка относительно кессона.
В соответствии с одним вариантом осуществления крыла, соответствующего изобретению, механизм перемещения содержит шпиндель, гайку шпинделя, которая связана с опорой, и привод, который вращает шпиндель вокруг его продольной оси с целью задания углового положения закрылка таким образом, что гайка шпинделя перемещается вдоль продольной оси шпинделя, тем самым поворачивая опору вокруг оси вращения закрылка. Четырехэлементный соединительный элемент связан также с гайкой шпинделя. В качестве примера привод представляет собой гидравлический или электрический привод. Гайка шпинделя связана с четырехэлементной соединительной передачей, посредством чего перемещение гайки шпинделя для вращения закрылка вводится через соединительную передачу в датчик вращения. Датчик вращения может, таким образом, выдавать выходной сигнал, который соответствует угловому положению закрылка.
В соответствии с одним предпочтительным вариантом осуществления крыла, соответствующего изобретению, четырехэлементная соединительная передача содержит первый рычаг и второй рычаг, который шарнирным образом присоединен к первому рычагу, причем первый рычаг дополнительно соединен с датчиком вращения в точке вращения датчика, а второй рычаг присоединен шарнирным образом к механизму перемещения, в особенности к универсальному шарниру гайки шпинделя в точке соединения. При необходимости опора прикрепляется к универсальному шарниру гайки шпинделя, в частности, с возможностью поворота относительно оси вращения. Для того чтобы прикрепить опору к гайке шпинделя с возможностью вращения, гайка шпинделя имеет, в частности, подвеску с универсальным шарниром.
Четырехэлементная соединительная передача в одном варианте крыла, соответствующего изобретению, образует четырехугольник, стороны которого образованы первым и вторым рычагами, а также соединительными путями между точкой вращения датчика и осью вращения и точкой соединения и осью вращения. Для того чтобы получить передачу поворотного движения закрылка на датчик вращения с соотношением 1:1, предпочтительно, чтобы четырехугольник представлял собой параллелограмм.
По дополнительному варианту осуществления крыла, соответствующего изобретению, крыло содержит дополнительную опору, к которой прикреплен закрылок и которая установлена по отношению к оси вращения закрылка с возможностью поворота относительно кессона; дополнительный механизм перемещения, который связан с дополнительной опорой для регулирования углового положения закрылка; и дополнительное измерительное устройство для определения углового положения закрылка, причем дополнительное измерительное устройство имеет дополнительный датчик вращения, который установлен на дополнительной опоре, и дополнительную четырехэлементную соединительную передачу, которая связана с дополнительным механизмом перемещения. В частности, два механизма перемещения являются физически идентичными.
Дополнительная задача изобретения решается с помощью воздушного судна, имеющего, по меньшей мере, одно крыло, соответствующее изобретению, которое, в частности, содержит устройство оценки, подключенное к двум датчикам вращения с целью оценки сигналов, поступающих от датчиков вращения. Если крыло, соответствующее изобретению, имеет закрылок, который присоединен к двум опорам, то во время перемещения закрылка два механизма перемещения приводятся в движение синхронно. Неисправность одного из двух механизмов перемещения может привести к искривлению или наклону закрылка во время его перемещения. В случае если такой наклон или искривление закрылка не будет своевременно установлено и его перемещение будет продолжаться, закрылок может быть поврежден или даже потерян. В соответствии с изобретением устройство оценки для воздушного судна разработано, в частности, таким образом, что оно может оценивать сигналы от двух датчиков вращения и на основании оценки определять неправильное рабочее состояние закрылка и/или, по меньшей мере, одного из двух механизмов перемещения. Неправильным рабочим состоянием, среди прочего, является искривление или наклон закрылка, его несинхронное перемещение или же повреждение механизма перемещения.
Если измерительные устройства физически идентичны и две опоры перемещаются синхронно, то выходные сигналы от двух датчиков вращения обычно одинаковы. Если два выходных сигнала отличаются существенно, то это может указывать на неисправность, такую как наклон закрылка или даже отказ одного из механизмов перемещения.
Следовательно, дифференциальный (разностный) сигнал, формирующийся от двух выходных сигналов при синхронном перемещении, относительно невелик, так что заключение о неисправности перемещения закрылка может быть сделано тогда, когда дифференциальный сигнал превышает заранее заданное предельное значение.
Если два механизма перемещения приводятся в движение двумя независимыми приводами, то сравнение двух выходных сигналов от датчиков вращения может быть использовано также и для синхронного регулирования приводов по разомкнутому контуру или по замкнутому контуру.
Крыло, соответствующее изобретению, и воздушное судно, соответствующее изобретению, позволяют, среди прочего, надежно устанавливать отказ одного из механизмов перемещения. В частности, можно надежно установить поломку универсального шарнира, к которому прикрепляется опора закрылка, и при необходимости проинформировать об этом пилота воздушного судна.
Краткое описание чертежей
Один пример осуществления изобретения проиллюстрирован со ссылкой на прилагаемые схематические чертежи, где:
Фиг.1 показывает воздушное судно с крылом,
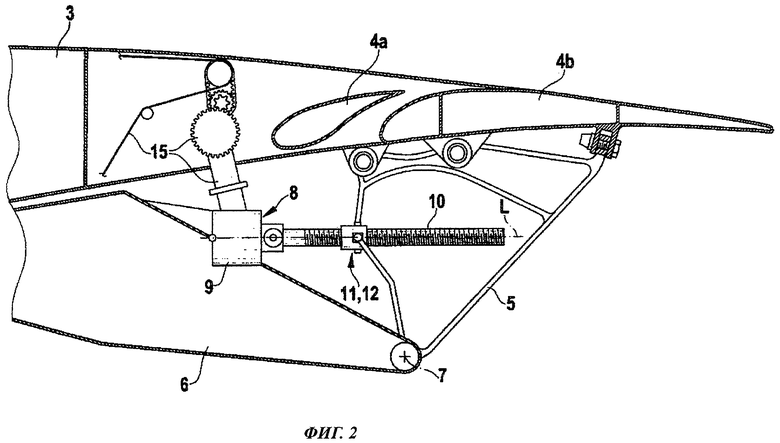
Фиг.2 показывает сечение крыла воздушного судна по фигуре 1.
Фиг.3 и 4 показывают различные положения посадочного закрылка на крыле,
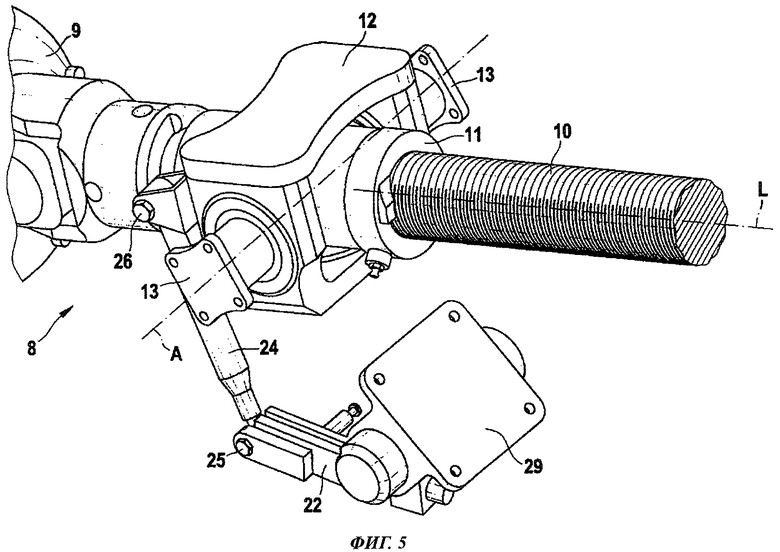
Фиг.5 показывает части механизма перемещения посадочного закрылка на крыле;
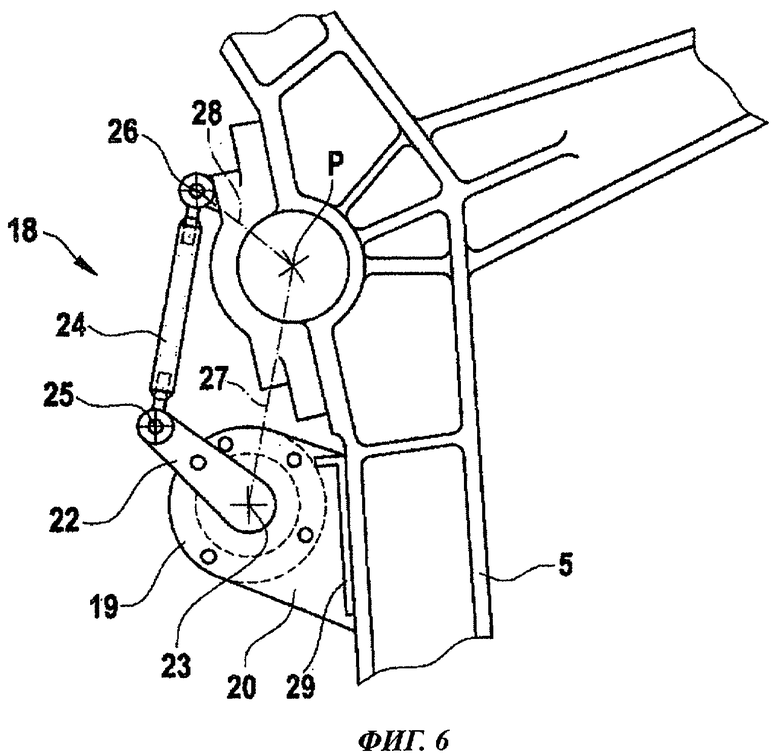
Фиг.6 показывает детальное изображение измерительного устройства для определения положения посадочного закрылка.
Осуществление изобретения
Фиг.1 показывает воздушное судно 1 с крылом 2. Крыло 2 имеет кессон 3 и множество посадочных закрылков 4, которые более подробно проиллюстрированы на фиг.2-4. В настоящем примере осуществления каждый из посадочных закрылков 4, включая и посадочный закрылок 4, который проиллюстрирован на фиг.2-4, имеет первый элемент 4а посадочного закрылка и второй элемент 4b посадочного закрылка, которые вместе прикрепляются к двум, по существу, идентичным опорам 5. На фиг.2-4 проиллюстрирована только одна из двух опор 5.
Каждая из двух опор 5 устанавливается на держателе 6, который прикрепляется к кессону 3 так, что опора могла поворачиваться относительно оси вращения 7 закрылка, которая проходит под прямым углом к плоскости фиг.2-4. Таким образом, посадочный закрылок 4 установлен при помощи двух опор 5 с возможностью вращения по отношению к оси вращения 7 закрылка относительно кессона 3.
Посадочные закрылки 4 предназначены для работы в различных положениях относительно кессона 3 при эксплуатации воздушного судна 1. Во время обычного полета посадочные закрылки 4 находятся во втянутом положении относительно кессона, как это показано на фиг.2 и 3. Для того чтобы увеличить аэродинамическую подъемную силу воздушного судна 1, в частности, во время взлета и посадки, посадочные закрылки 4 могут быть выпущены в положение относительно кессона, показанное на фиг.4. Во время перемещения между втянутым положением, показанным на фиг.3, и выпущенным положением, показанным на фиг.4, посадочные закрылки 4 поворачиваются вокруг оси вращения 7 закрылка.
Чтобы переместить посадочные закрылки 4 между втянутым положением и выпущенным положением, крыло 2 имеет механизмы перемещения 8, каждый из которых присоединен к одной из опор 5 и во время работы механизма перемещения 8 поворачивает ее вокруг оси вращения 7 закрылка. Один из механизмов перемещения 8 проиллюстрирован на фиг.2 вместе со своими деталями, которые более подробно проиллюстрированы на фиг.5.
Механизм перемещения 8 имеет головку 9 шпинделя, которая прикрепляется к соответствующему держателю 6, шпиндель 10, который подвешивается на универсальном шарнире на головке 9, имеет продольную ось L шпинделя и проиллюстрирован на фиг.5 лишь частично, а также гайку 11 шпинделя с универсальным шарниром 12. В случае настоящего примера осуществления универсальный шарнир 12 представлен в форме соединяемого с помощью универсального шарнира кольца, на котором на двух соответствующих зажимных устройствах 13 универсального шарнира 12 устанавливается соответствующая опора 5 таким образом, чтобы она могла поворачиваться относительно оси А.
Для того чтобы переместить посадочные закрылки 4, шпиндели 10 механизма перемещения 8 вращают посредством подходящего привода вдоль продольной оси L шпинделя. Таким образом, гайка 11 шпинделя вместе с ее универсальным шарниром 12 перемещается вдоль продольной оси L шпинделя 10, в результате чего опоры 5, тем самым и посадочные закрылки 4, поворачиваются по отношению к оси вращения 7 закрылка относительно кессона 3. В зависимости от положения универсального шарнира 12 относительно шпинделя 10, посадочный закрылок 4 и опора 5 принимают соответствующее угловое положение по отношению к кессону 3.
Шпиндели 10 механизмов перемещения 8 могут приводиться в движение, например, с помощью центрального гидравлического или электрического привода, который не проиллюстрирован на фигурах более подробно, посредством вращения вала, как это хорошо известно, например, из документа ЕР 0922633 В1, на который была сделана ссылка. Отдельные шпиндели 10 механизмов перемещения 8 приводятся в движение центральным приводом синхронно.
Однако в случае настоящего примера осуществления каждый из отдельных механизмов перемещения 8 имеет свой собственный привод 14, который приводит в действие соответствующие шпиндели 10. Как схематически проиллюстрировано на фиг.1, приводы 14 располагаются в кессоне 3 и представляют собой, например, электрические или гидравлические приводы. Соответствующие приводы 14 присоединяются к соответствующим шпинделям 10 посредством блока передач 15 для механизмов перемещения 8, часть которого проиллюстрирована на фиг.2.
Как описано ранее, каждый из посадочных закрылков 4 прикрепляется в каждом случае к двум, по существу, идентичным опорам 5. Каждая из опор 5 приводится в движение своим собственным механизмом перемещения 8 с помощью своего собственного привода 14. Чтобы не допустить наклона посадочных закрылков 4, две соответствующие опоры 5 перемещаются синхронно. С этой целью приводы 14 подключены посредством электрических линий 21 к компьютеру 17, который расположен в фюзеляже 16 воздушного судна 1 и активирует приводы 14 надлежащим образом. Компьютер 17, в свою очередь, подключается (способом, который не проиллюстрирован) к приборной доске кабины экипажа воздушного судна 1, так чтобы пилот мог перемещать посадочные закрылки 4.
Измерительное устройство 18, которое проиллюстрировано на фиг.3, 4 и 6, связано с каждой опорой 5 для определения углового положения соответствующего посадочного закрылка 4 или соответствующей опоры 5 по отношению к кессону 3.
Измерительное устройство 18 имеет в принципе хорошо известный датчик вращения 19, который размещается в корпусе 20 датчика. Корпус 20 датчика плотно прикручивается к опоре 5 через соединительную подошву 29 датчика, которая более подробно проиллюстрирована на фиг.5. Вал, который на фигурах скрыт рычагом 22 датчика, выходит из корпуса 20 датчика и плотно присоединяется к одному концу рычага 22 датчика. Продольная ось вала датчика вращения 19 ориентирована под прямым углом к плоскости фиг.6. Соединительная точка между рычагом 22 датчика и валом датчика вращения 19 образует точку вращения 23 датчика, так чтобы вал датчика вращения 19 мог вращаться относительно корпуса 20 датчика с помощью рычага 22 датчика. Датчик вращения 19 выдает соответствующий выходной сигнал на основании положения вала датчика вращения 19 относительно корпуса 20 датчика, и этот сигнал подается на компьютер 17 посредством электрической линии, которая для лучшего чтения чертежа условно не показана. В свою очередь, на компьютере 17 запускается программа, которая рассчитывает положение соответствующей опоры 5 относительно кессона 3 на основании выходного сигнала, который подается датчиком вращения 19.
Измерительное устройство 18 имеет соединительную тягу 24. Один конец соединительной тяги 24 присоединяется шарнирным образом через первую точку соединения 25 к тому концу рычага 22 датчика, который не соединен с датчиком вращения 19. Другой конец соединительной тяги 24 присоединяется шарнирным образом через вторую соединительную точку 26 к универсальному шарниру 12.
Рычаг 22 датчика и соединительная тяга 24, по существу, показаны на фигуре 6 в плоскости чертежа. Ось, относительно которой устанавливается опора 5, так чтобы она могла поворачиваться на универсальном шарнире 12, пересекает плоскость чертежа в точке Р. Соединительный путь между точкой Р и точкой вращения 23 датчика обозначен номером 27. Соединительный путь между точкой Р и второй точкой 26 соединения обозначен номером 28.
Рычаг 22 датчика, соединительная тяга 24 и два соединительных пути 27, 28 образуют четырехугольник, который представляет собой четырехэлементную соединительную передачу, которая связывает универсальный шарнир 12 с датчиком вращения 19 или с валом датчика вращения 19. Таким образом, эта четырехэлементная соединительная передача перемещает датчик вращения 19 при повороте соответствующей опоры вокруг оси вращения 7 датчика. Это можно видеть на фиг.3 и 4, поскольку когда посадочный закрылок 4 и опора 5 находятся в различных положениях по отношению к кессону 3, рычаг 22 датчика в каждом случае посредством соединительной тяги 24 принимает два разных положения по отношению к опоре 5, в результате чего рычаг 22 датчика перемещает вал датчика вращения 19 относительно корпуса 20 датчика.
Кроме того, в настоящем примере осуществления длины рычага 22 датчика, соединительной тяги 24 соединительных путей 27, 28 рассчитываются таким образом, что эти компоненты образуют параллелограмм. Это создает в результате передаточное отношение 1:1 для вращательного движения опоры 5 относительно оси вращения 7 закрылка и перемещения датчика вращения 19.
В настоящем примере осуществления измерительное устройство 18 прикреплено к каждой опоре 5 крыла 2 и измеряет соответствующее угловое положение опоры 5. Выходные сигналы от датчиков вращения 19, соответствующие угловым положениям, подаются на компьютер 17 по электрическим линиям, которые не показаны. Как уже было описано ранее, посадочные закрылки 4 должны перемещаться синхронно. В частности, две опоры 5 для одного конкретного посадочного закрылка 4 должны перемещаться синхронно с тем, чтобы не допускать наклона или искривления посадочного закрылка 4.
В настоящем примере осуществления на компьютере 17 запускается программа, которая оценивает выходные сигналы от датчиков вращения 19 и управляет приводами 14 на основании этой оценки таким образом, что две опоры 5 посадочного закрылка 4 перемещаются синхронно. В частности, компьютер 17 формирует дифференциальный сигнал из двух выходных сигналов от двух датчиков вращения 19, которые связаны с одним посадочным закрылком 4. До тех пор пока соответствующие опоры 5 перемещаются, амплитуда сигнала относительно невелика. Если, в отличие от этого, амплитуда дифференциального сигнала превышает некоторое верхнее предельное значение, то можно сделать вывод о том, что две опоры 5 перемещаются несинхронно, и, кроме того, можно сделать вывод, например, о том, что универсальный шарнир 12 сломан. В настоящем примере осуществления в момент, когда амплитуда дифференциального сигнала превышает предельное значение, компьютер 17 прерывает дальнейшее перемещение опор 5 и посылает соответствующее предупреждающее сообщение на приборную доску кабины экипажа воздушного судна 1.
Перечень ссылочных обозначений
1 - воздушное судно; 2 - крыло; 3 - кессон; 4 - посадочный закрылок; 4а, 4b - элемент посадочного закрылка; 5 - опора; 6 - держатель; 7 - ось вращения закрылка; 8 - механизм перемещения; 9 - головка шпинделя; 10 - шпиндель; 11 - гайка шпинделя; 12 - универсальный шарнир (кольцо, соединяемое с помощью универсального шарнира); 13 - зажимные устройства; 14 - привод; 15 - блок передач; 16 - фюзеляж воздушного судна; 17 - компьютер; 18 - измерительное устройство; 19 - датчик вращения; 20 - корпус датчика; 21 - электрические линии; 22 - рычаг датчика; 23 - точка вращения датчика; 24 - соединительная тяга; 25 - точка соединения; 26 - точка соединения; 27, 28 - соединительный путь; 29 - соединительная подошва датчика; А - ось; L - продольная ось шпинделя; Р - точка.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРЫЛО ВОЗДУШНОГО ИЛИ КОСМИЧЕСКОГО СУДНА, СОДЕРЖАЩЕЕ ПОДВИЖНОЕ ОБТЕКАЕМОЕ ТЕЛО | 2010 |
|
RU2505455C2 |
| Устройство управления закрылками крыла самолёта | 2021 |
|
RU2764335C1 |
| КРЫЛО САМОЛЕТА | 2014 |
|
RU2557638C1 |
| КРЫЛО ШИРОКОФЮЗЕЛЯЖНОГО ДАЛЬНЕМАГИСТРАЛЬНОГО САМОЛЕТА | 2024 |
|
RU2838859C1 |
| КРЫЛО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2786894C1 |
| ПОВЕРХНОСТЬ УПРАВЛЕНИЯ ЗАДНЕЙ КРОМКОЙ КРЫЛА САМОЛЕТА | 2006 |
|
RU2405715C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ЗАКРЫЛКОВ ВЕЕРНОГО ТИПА КРЫЛА САМОЛЕТА | 2014 |
|
RU2539018C1 |
| УЗЕЛ ОТКЛОНЯЕМОГО НОСКА КРЫЛА | 1996 |
|
RU2181332C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЭЛЕМЕНТОМ МЕХАНИЗАЦИИ КРЫЛА | 2002 |
|
RU2238219C2 |
| СИСТЕМА НАВЕСКИ ЗАКРЫЛКОВ КРЫЛА САМОЛЕТА | 2023 |
|
RU2819458C1 |


Изобретения относятся к крылу воздушного судна, в частности крылу самолета, и к вариантам воздушного судна, снабженным таким крылом. Крыло воздушного судна содержит кессон; опору, установленную по отношению к кессону с возможностью поворота относительно оси вращения закрылка; закрылок, прикрепленный к опоре с возможностью поворота относительно оси вращения закрылка при повороте опоры относительно кессона; механизм перемещения, связанный с опорой, для задания углового положения закрылка относительно кессона; и измерительное устройство для определения углового положения закрылка. Измерительное устройство имеет датчик вращения, установленный на опоре, и четырехэлементную соединительную передачу, которая связывает датчик поворота с механизмом перемещения. Согласно первого варианта воздушное судно включает в себя, по крайней мере, одно такое крыло, а согласно второму варианту еще и устройство оценки, подключенное к двум датчикам вращения для оценки сигналов, поступающих от датчиков вращения. Достигается повышение надежности воздушного судна. 3 н. и 9 з.п. ф-лы, 6 ил.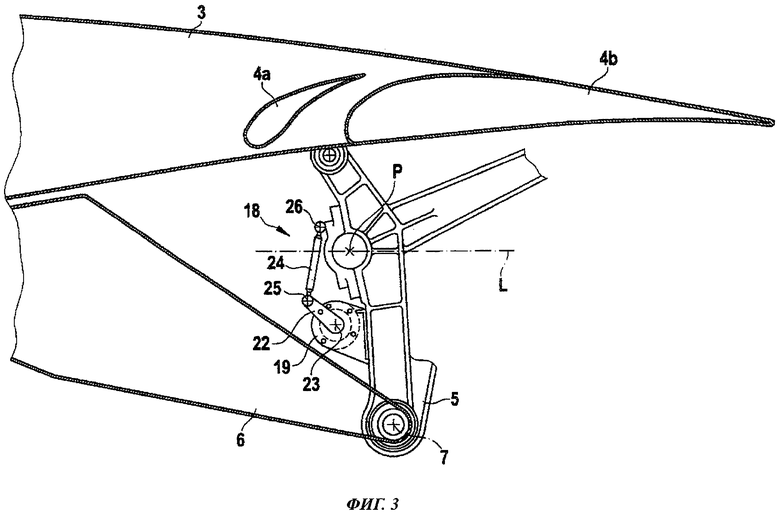
1. Крыло воздушного судна (1), содержащее кессон (3); опору (5), установленную по отношению к кессону (3) с возможностью поворота относительно оси вращения (7) закрылка; закрылок (4), прикрепленный к опоре (5) с возможностью поворота относительно оси вращения (7) закрылка при повороте опоры (5) относительно кессона (3); механизм перемещения (8), связанный с опорой (5), для задания углового положения закрылка (4) относительно кессона (3); и измерительное устройство (18) для определения углового положения закрылка (4), причем измерительное устройство (18) имеет датчик вращения (19), установленный на опоре (5), и четырехэлементную соединительную передачу (22, 24, 27, 28), которая связывает датчик поворота (19) с механизмом перемещения (8).
2. Крыло по п.1, отличающееся тем, что механизм перемещения (8) содержит шпиндель (10), гайку (11) шпинделя, связанную с опорой (5), и привод (14), причем четырехэлементная соединительная передача (22, 24, 27, 28) связана с гайкой (11) шпинделя, а привод (14) вращает шпиндель (10) вокруг его продольной оси (L) для задания углового положения закрылка (4) таким образом, что гайка (11) шпинделя перемещается вдоль продольной оси (L) шпинделя (10), тем самым поворачивая опору (5) вокруг оси вращения (7) закрылка.
3. Крыло по п.1, отличающееся тем, что четырехэлементная соединительная передача (22, 24, 27, 28) содержит первый рычаг (22) и второй рычаг (24), который шарнирным образом присоединен к первому рычагу (22), причем первый рычаг (22) дополнительно соединен с датчиком вращения (19) в точке вращения (23) датчика, а второй рычаг (24) присоединен шарнирным образом к механизму перемещения (8) в точке соединения (26).
4. Крыло по п.3, отличающееся тем, что второй рычаг (24) присоединен шарнирным образом к гайке (11) шпинделя в точке соединения (26).
5. Крыло по п.4, отличающееся тем, что гайка (11) шпинделя содержит универсальный шарнир (12), посредством которого второй рычаг (24) закреплен шарнирным образом в точке соединения (26), и к которому прикреплена опора (5) с возможностью поворота относительно оси вращения (А).
6. Крыло по п.5, отличающееся тем, что четырехэлементная соединительная передача (22, 24, 27, 28) образует четырехугольник, стороны которого образованы первым и вторым рычагами (22, 24), а также соединительными путями (27, 28) между точкой вращения (23) датчика и осью вращения (А), и точкой соединения (26) и осью вращения (А).
7. Крыло по п.6, отличающееся тем, что четырехугольник (22, 24, 27, 28) представляет собой параллелограмм.
8. Крыло по одному из пп.1-7, отличающееся тем, что закрылок представляет собой посадочный закрылок (4).
9. Крыло по одному из пп.1-7, отличающееся тем, что содержит дополнительную опору, к которой прикреплен закрылок (4), и которая установлена по отношению к оси вращения (7) закрылка с возможностью поворота относительно кессона (3); дополнительный механизм перемещения, который связан с дополнительной опорой для регулирования углового положения закрылка (4); и дополнительное измерительное устройство для определения углового положения закрылка (4), причем дополнительное измерительное устройство имеет дополнительный датчик вращения, который установлен на дополнительной опоре, и дополнительную четырехэлементную соединительную передачу, которая связана с дополнительным механизмом перемещения.
10. Воздушное судно, содержащее, по меньшей мере, одно крыло (2), охарактеризованное в одном из пп.1-9.
11. Воздушное судно, содержащее, по меньшей мере, одно крыло (2), охарактеризованное в п.9, и устройство оценки (17), подключенное к двум датчикам вращения (19), для оценки сигналов, поступающих от датчиков вращения (19).
12. Воздушное судно по п.11, отличающееся тем, что устройство оценки (17) формирует дифференциальный сигнал из двух сигналов от датчиков вращения (19) и выполнено с возможностью определения, в случае превышения дифференциальным сигналом или не достижения им предельного значения, неправильного рабочего состояния закрылка (4) и/или, по меньшей мере, одного из двух механизмов перемещения (8).
| Фотоэлектрическое устройство для измерения плотности текстильных материалов | 1980 |
|
SU922633A1 |
| US 4789119 А1, 04.11.1986 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАКРЫЛКОМ САМОЛЕТА | 1988 |
|
SU1804039A1 |
| УСТРОЙСТВО ДЛЯ ВЫДВИЖЕНИЯ ЗАКРЫЛКА | 2001 |
|
RU2214347C2 |
| US 3874617 А1, 01.04.1975. | |||

