Изобретение относится к увеличивающим подъемную силу крыла системам для летательного аппарата в соответствии с ограничительной частью пункта 1 формулы изобретения.
Известно большое количество увеличивающих подъемную силу крыла систем для летательного аппарата. В сущности, они содержат увеличивающие подъемную силу закрылки, которые расположены на крыле летательного аппарата и выполнены с возможностью перемещения посредством исполнительного привода между убранным положением, в котором закрылок непрерывно дополняет форму крыла, в сущности без каких-либо зазоров, и несколькими выпущенными положениями, в которых между крылом и закрылком образуется щель заданной ширины, а закрылок расположен с заданным углом относительно профиля крыла. В общем случае выпуск закрылков происходит так, что перемещение, с одной стороны, включает перемещение закрылка относительно крыла назад, и, таким образом, увеличение (удлинение) эффективного профиля крыла, и с другой стороны - увеличение угла отклонения закрылка с увеличением кривизны профиля, приводящим к увеличению аэродинамической подъемной силы. Воздух с большой скоростью протекает через щель, образованную между крылом и закрылком в выдвинутом положении, от нижней поверхности крыла к верхней поверхности закрылка, способствуя, таким образом, увеличению подъемной силы.
С одной стороны, среди наиболее широко используемых в настоящее время увеличивающих подъемную силу крыла систем необходимо, в частности, упомянуть так называемые закрылки Фаулера. В случае закрылков Фаулера при выдвижении закрылок отводится назад в строну от крыла, образуя щель между крылом и закрылком, с накладывающимся на это перемещение увеличением угла отклонения закрылка, в частности при увеличении выдвижения закрылка. Это комбинированное перемещение также называется отклонением Фаулера.
С другой стороны, известно устройство, именуемое кинематикой поворотной пары (опускаемого шарнира) (dropped hinge kinematics), или кинематикой поворотного закрылка, в котором закрылок установлен на рычаге закрылка так, что он имеет возможность поворота вокруг предусмотренной под крылом точки вращения. Как подразумевает само название, во время выдвижения закрылок перемещается вокруг расположенной под крылом точки вращения по траектории в форме дуги окружности.
Цель изобретения заключается в разработке улучшенной увеличивающей подъемную силу крыла системы.
Эта цель достигнута посредством увеличивающей подъемную силу крыла системы с изложенными в пункте 1 формулы изобретения признаками.
Зависимые пункты формулы изобретения описывают преимущественные варианты осуществления и модификации изобретения.
Согласно изобретению предлагается увеличивающая подъемную силу крыла система для летательного аппарата, имеющая увеличивающий подъемную силу крыла закрылок, который расположен на крыле летательного аппарата, установлен с возможностью поворота вокруг одной или более точек вращения на крыле, или на каретке, или сопряженном с крылом рычаге и выполнен с возможностью перемещения посредством приводного устройства между убранным положением, в котором закрылок дополняет форму крыла, и несколькими выпущенными положениями, в которых между крылом и закрылком образована щель заданной ширины, и закрылок расположен с заданным углом относительно профиля крыла. Согласно изобретению точка вращения, вокруг которой закрылок имеет возможность поворота, расположена в изменяемом положении относительно крыла, или каретки, или сопряженного с крылом рычага.
Согласно одному варианту осуществления изобретения закрылок установлен на рычаге закрылка с возможностью поворота вокруг точки вращения, предусмотренной под крылом.
Закрылок расположен на рычаге закрылка в неподвижном положении и выполнен с возможностью поворота по круговой траектории вокруг точки вращения.
Согласно другому варианту осуществления изобретения точка вращения, вокруг которой закрылок имеет возможность поворота, образована посредством первого шарнира на каретке, которая имеет возможность перемещения по направляющей, простирающейся наклонно вниз к задней части крыла.
Точка вращения, вокруг которой закрылок имеет возможность поворота, выполнена посредством второго шарнира, который расположен дальше к задней части закрылка и сочленен с расположенным на крыле третьим шарниром через рычаг, посредством которого задняя часть закрылка вытягивается вниз для увеличения угла отклонения по мере увеличения выпуска.
Точка вращения, вокруг которой закрылок имеет возможность поворота, образована посредством третьего шарнира, который расположен на крыле и посредством которого расположенный в задней части закрылка второй шарнир сопряжен через рычаг, посредством которого задняя часть закрылка вытягивается вниз для увеличения угла отклонения по мере увеличения выпуска.
Согласно одному варианту осуществления изобретения закрылок установлен в неподвижном положении по отношению к рычагу закрылка и имеет возможность поворота по круговой траектории вокруг точки вращения.
Согласно одному варианту осуществления увеличивающей подъемную силу крыла системы точка вращения, вокруг которой закрылок имеет возможность поворота, расположена на кинематическом элементе, расположенном с возможностью перемещения относительно крыла, или каретки, или соединенного с крылом рычага, и положение этого элемента может быть изменено посредством приводного устройства. Кинематический элемент является, в сущности, устройством для перемещения или позиционирования точки вращения, которая может быть перемещена в зависимости от требований.
Кинематический элемент может быть образован посредством рычага или эксцентрика, установленным с возможностью поворота вокруг второй точки вращения на крыле, или каретке, или сочлененном с крылом рычаге, при этом первая точка вращения, вокруг которой закрылок установлен так, что он имеет возможность вращения, расположена на расстоянии от второй точки вращения, и при этом рычаг или эксцентрик имеет возможность перемещения относительно второй точки вращения посредством приводного устройства.
Вторая точка вращения может быть неподвижно закреплена в положении на крыле.
Согласно одному варианту осуществления увеличивающей подъемную силу крыла системы приводное устройство, посредством которого можно изменять положение кинематического элемента, может управляться независимо от исполнительного привода закрылка.
Согласно другому варианту осуществления увеличивающей подъемную силу крыла системы приводное устройство, посредством которого положение кинематического элемента может быть изменено, выполнено с возможностью приведения в действие жестко сочлененным с исполнительным приводом для увеличивающего подъемную силу закрылка.
Кинематический элемент выполнен с возможностью приведения в действие посредством электрического или гидравлического приводного устройства, сочлененного с кинематическим элементом.
Один примерный вариант осуществления изобретения предусматривает точку вращения, относительно которой закрылок установлен так, что он имеет возможность поворота, имеет возможность перемещения посредством приводного устройства так, что точка вращения принимает первое положение относительно продольного направления (х) летательного аппарата и вертикального направления (z) летательного аппарата при убранном положении закрылка, соответствующем положению крейсерского полета, при этом в первом положении закрылок непрерывно дополняет форму крыла, по существу без каких-либо зазоров, и принимает второе положение, расположенное под первым положением относительно вертикального направления (z) летательного аппарата, в первом выдвинутом положении закрылка, соответствующее положению взлета.
В этом случае возможно предусмотреть, что точка вращения, относительно которой закрылок установлен так, что он имеет возможность поворота, принимает второе положение, в котором закрылок находится в первом выдвинутом положении, соответствующем положению взлета, при этом второе положение также расположено перед первым положением, соответствующим положению крейсерского полета, относительно продольного направления (х) летательного аппарата.
Кроме того, существует возможность предусмотреть, что точка вращения, относительно которой закрылок установлен так, что он имеет возможность поворота, принимает третье положение, в котором закрылок находится во втором выдвинутом положении, соответствующем положению приземления, при этом третье положение расположено позади второго положения относительно продольного направления (х) летательного аппарата и над вторым положением, соответствующим положению взлета, относительно вертикального направления (z) летательного аппарата.
Согласно одному варианту осуществления увеличивающей подъемную силу крыла системы обеспечена возможность непрерывного перемещения между положениями точки вращения, которые соответствуют различным положениям закрылка, вокруг которых закрылок имеет возможность поворота по круговой траектории, центральная точка которой образует вторую точку вращения.
Далее изобретение описано со ссылкой на прилагаемые чертежи, на которых
приведены:
Фиг.1: схематическое изображение в поперечном разрезе увеличивающей подъемную силу крыла системы для летательного аппарата согласно одному примерному варианту осуществления изобретения;
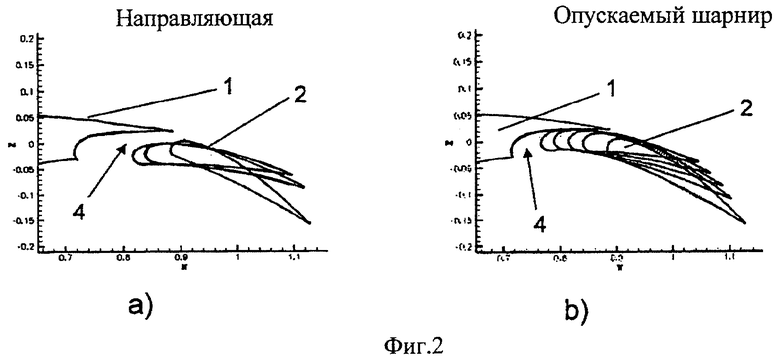
Фиг.2a: схематическое изображение разных фаз во время выпуска систем закрылка посредством кинематики направляющая - заднее звено;
Фиг.2b: схематическое изображение разных фаз при выдвижении систем закрылка посредством кинематики поворотной пары (опускаемого шарнира);
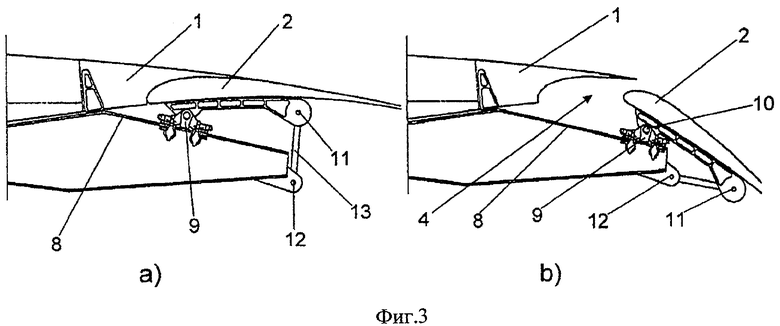
Фиг.3а и 3b: вид сбоку увеличивающей подъемную силу крыла системы летательного аппарата согласно другому примерному варианту осуществления изобретения, при этом на фиг.3а показан примерный вариант осуществления изобретения в убранном положении, а на фиг.3b изображен примерный вариант осуществления изобретения в выдвинутом положении, а также
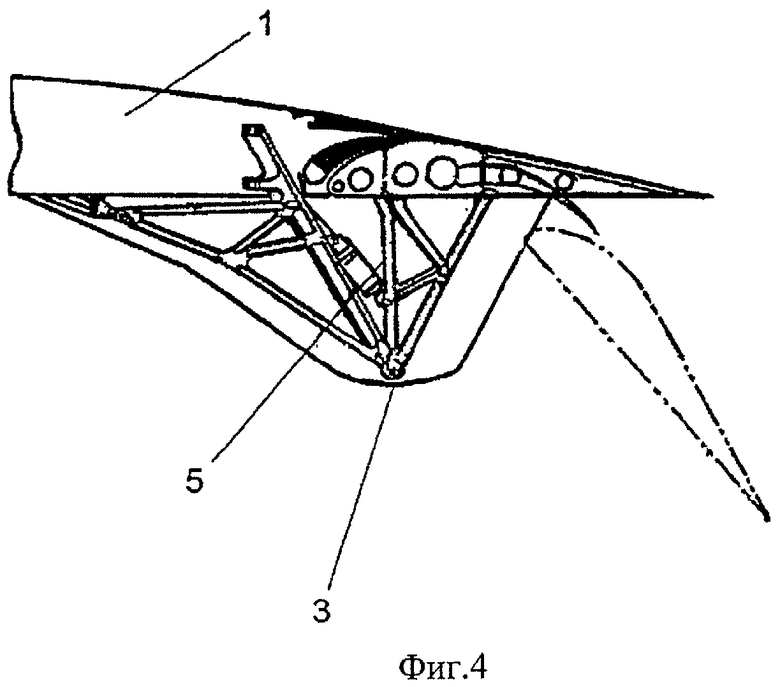
Фиг.4: схематическое изображение в поперечном разрезе увеличивающей подъемную силу крыла системы для летательного аппарата согласно одному примерному варианту изобретения.
На фиг.1 и 4 показана кинематика опускаемого шарнира закрылка, в которой увеличивающий подъемную силу закрылок 2, расположенный на крыле 1 летательного аппарата, установлен на поворотном плече или рычаге 5 закрылка так, что он имеет возможность поворота вокруг предусмотренной под крылом 1 точки 3 вращения. На фиг.4 показан закрылок 2 в убранном положении, в котором закрылок непрерывно продолжает профиль крыла, по существу без каких-либо щелей, и в полностью выдвинутом положении, соответствующем положению приземления, при этом рычаг 5 закрылка в последнем случае для улучшения понимания не показан. В качестве исполнительного привода может быть предусмотрен гидравлический исполнительный механизм, и он сочленен между рычагом 5 закрылка и точкой, расположенной в неподвижном положении относительно крыла 1. Как показано на фиг.2b, в случае кинематики опускаемого шарнира закрылка щель 4 между крылом 1 и закрылком 2 в начале выпуска открывается лишь медленно, так как закрылок 12 перемещается по дуге окружности.
На фиг.1 поворотное плечо или рычаг 5 закрылка, на котором закрылок 2 расположен и установлен с возможностью поворота закрылка вокруг выполненной под крылом 1 (опускаемый шарнир) точки 3 вращения, обозначен лишь простой линией.
В показанном на фиг.1 примерном варианте осуществления изобретения закрылок 2 представлен в трех разных положениях I, II, III. В убранном положении I, положении крейсерского полета, закрылок 2 непрерывно продолжает форму крыла 1, по существу без каких-либо щелей. В первом выдвинутом положении II и во втором выдвинутом положении III, образующих, соответственно, положение взлета и положение приземления, закрылок расположен с заданным углом относительно крыла 1, образуя щель 4 заданной ширины между крылом 1 и закрылком 2. Как показано на фиг.1, в положении приземления III закрылок 1 обычно имеет намного большее отклонение, чем в положении взлета II. В показанном на фиг.1 примерном варианте осуществления изобретения, закрылок 2, закрылок установлен в неподвижном положении на рычаге 5 закрылка, то есть он, можно сказать, жестко соединен с ним и поэтому во время выдвижения поворачивается по круговой траектории вокруг точки вращения 3, радиус которой регулируется длиной рычага 5 закрылка. Эти положения необходимо рассматривать исключительно в качестве иллюстративных, а кинематика, несомненно, может быть образована другим образом.
Точка 3 вращения, вокруг которой закрылок (2) имеет возможность поворота, расположена в изменяемом относительно крыла 1 положении заданным образом, прежде всего по существу в той же плоскости, что и поворотное перемещение закрылка 2, другими словами - на плоскости под прямыми углами к оси вращения, проходящей через точку вращения, вокруг которой закрылок (2) имеет возможность поворота посредством рычага 5 закрылка, и может, например, быть предусмотрена на кинематическом элементе 6, расположенном с возможностью перемещения относительно крыла 1, и положение которого может быть изменено посредством приводного устройства, не проиллюстрированного отдельно на фиг.1. В проиллюстрированном примерном варианте осуществления изобретения кинематический элемент 6 образован рычагом или эксцентриком, установленным с возможностью поворота вокруг второй точки 7 вращения, которая расположена в неподвижном положении относительно крыла 1. Первая точка 3 вращения, вокруг которой вращается или поворачивается поворотное плечо или рычаг 5 закрылка, отделена посредством предварительно заданного расстояния от второй точки 7 вращения. Рычаг или эксцентрик 6 выполнен с возможностью перемещения вокруг второй точки 7 вращения посредством приводного устройства, при этом первая точка 3 вращения описывает круговую траекторию вокруг второй точки 7 вращения, как показано на фиг.1.
Приводное устройство, посредством которого положение кинематического элемента 6 может быть изменено, может быть приведено в действие независимо от исполнительного привода, увеличивающего подъемную силу закрылка 2, или может быть приведено в действие совместно с исполнительным приводом закрылка 2 или с приводимым им элементом.
Точка 3 вращения, вокруг которой закрылок 2 имеет возможность поворота, может быть перемещена посредством приводного устройства так, что она принимает первое положение относительно продольного направления х летательного аппарата и вертикального направления 7 летательного аппарата при нахождении закрылка 2 в убранном положении I, соответствующем положению крейсерского полета, при этом в первом положении закрылок 2 непрерывно продолжает форму крыла 1, по существу без каких-либо щелей, как показано на фиг.1.
В первом выдвинутом положении II, как показано на фиг.1, соответствующем положению взлета, точка 3 вращения принимает второе положение, расположенное перед первым положением относительно продольного направления х летательного аппарата в проиллюстрированном примерном варианте осуществления, при этом в первом положении точка 3 вращения принимает положение крейсерского полета I. Иными словами, для положения взлета точка 3 вращения передвигается вперед и вниз относительно крыла 1, что приводит к увеличению щели 4 между крылом 1 и закрылком 2 и увеличению потока от нижней поверхности крыла 1 к верхней поверхности закрылка, и, таким образом, к увеличению подъемной силы.
В третьем положении III закрылка 2, показанном на фиг.1 и соответствующем положению приземления, кинематический элемент 6 повернут так, что точка 3 вращения, вокруг которой поворачивается поворотное плечо или рычаг 5 закрылка, принимает третье положение, которое в проиллюстрированном примерном варианте осуществления расположено к задней части относительно продольного направления х и выше относительно вертикального направления z летательного аппарата второго положения точки 3 вращения для положения II взлета.
В положении III приземления угол отклонения закрылка 2 относительно крыла 1 больше, то есть рычаг 5 закрылка был повернут на больший угол из положения I крейсерского полета, чем в случае положения II взлета. В положении III закрылок 2 был перемещен дальше назад и вверх относительно крыла 1, чем это было бы в случае, если закрылок 2 был бы повернут далее из положения взлета в положение приземления при неизменном положении точки 3 вращения. Это приводит к эффективному удлинению профиля крыла, при этом верхняя поверхность закрылка 2 меньше смещена вниз и вперед относительно верхней поверхности крыла 1.
Кинематический элемент 6 в виде рычага или эксцентрика выполнен с возможностью приведения в действие посредством электрического или гидравлического приводного устройства или прочего подходящего способа.
При выполнении кинематического элемента 6 в виде рычага или эксцентрика, положения точки 3 вращения, соответствующие различным положениям I, II, III закрылка 2 и вокруг которых закрылок 2 имеет возможность поворота на рычаге 5 закрылка, лежат на круговой траектории, центральная точка которой образована второй точкой 7 вращения кинематического элемента 6. Обеспечена возможность непрерывного перемещения между каждыми из положений точек 3 вращения, соответствующими различным положениям I, II, III закрылка 2, так что точка 3 вращения имеет возможность перемещения из положения, соответствующего положению 1 крейсерского полета (убранный закрылок) через положение, соответствующее положению II взлета (частично убранный закрылок) в положение, соответствующее положению III приземления (полностью убранный закрылок), и в обратном направлении. Таким образом, этот способ приведения в действие аналогичен известному способу для кинематики закрылка.
На фиг.3а и 3b показан механизм приведения в действие закрылка Фаулера в виде так называемой кинематики направляющая - заднее звено (track rear link kinematics) согласно другому примерному варианту осуществления изобретения. Направляющая 8, которая простирается под наклоном вниз к задней части крыла 1, предусмотрена на нижней поверхности крыла, а каретка 9 установлена так, что она имеет возможность перемещения по этой направляющей, при этом каретка 9 сопряжена с точкой вращения в передней / фронтальной области закрылка 2 посредством первого шарнира 10. Рычаг 13 (заднее звено (rear link)) расположен между вторым шарниром 11, который расположен далее к задней части закрылка 2, и третьим шарниром 12, расположенным на заднем конце направляющей 8, посредством чего задняя часть закрылка вытягивается вниз для увеличения угла отклонения по мере увеличения выпуска. На фиг.3 проиллюстрировано убранное положение закрылка 2, соответствующее положению крейсерского полета. На фиг.3b показано полностью выпущенное положение закрылка 2, соответствующее положению приземления. В случае закрылка Фаулера, подобного проиллюстрированному, это приводит к относительно быстрому открыванию щели 4, расположенной между крылом 1 и посадочным закрылком 2 за счет наклонного положения направляющей 8 относительно продольного направления х летательного аппарата, как показано на фиг.2а.
Один(-на) или более шарниров или точек 10, 11 и 12 вращения, вокруг которых закрылок 2 имеет возможность поворота, расположены, в свою очередь, в изменяемом положении, в особенности в случае точки 10 вращения, для обеспечения дополнительного относительного перемещения относительно направляющей 8 крыла 1 и, в случае точки 11 вращения, для обеспечения дополнительного относительного перемещения между закрылком 2 и рычагом 13. Это дополнительное относительное перемещение еще раз выполняется по существу на той же плоскости, что и поворот закрылка 2.
Шарнир или точка 10, 11, 12 вращения или по меньшей мере один из шарниров или одна из точек 10, 11, 12 вращения поворачиваются на соответствующем кинематическом элементе, который выполнен с возможностью перемещения и положение которого может быть изменено посредством приводного устройства. Аналогично проиллюстрированному в примерном варианте осуществления изобретения на фиг.1 способу кинематический элемент может быть образован, например, рычагом или эксцентриком, который, в зависимости от шарнира или точки 10, 11, 12 вращения, на которой он предусмотрен, установлен с возможностью поворота вокруг закрылка 12 и рычага 13 на каретке 9, на направляющей 8 или между ними. При вращении рычага или эксцентрика точка 10, 11, 12 вращения следует соответствующей круговой траектории.
Приводное устройство, посредством которого положение кинематического элемента может быть изменено, может, в свою очередь, быть приведено в действие независимо от исполнительного привода увеличивающего подъемную силу закрылка 2 или быть приведено в действие непосредственно сопряженным с исполнительным приводом закрылка 2 или с приводимым им элементом.
Поэтому изменяемость положения одного или более шарниров или точек 10, 11, 12 вращения может в каждом случае быть достигнута посредством дополнительного шарнира, сопряженного через рычаг или кривошип с соответствующими шарнирами или точками 10, 11, 12 вращения изменяемого положения, при этом рычаг или кривошип могут быть перемещены или повернуты посредством приводного устройства. Эта реализация может быть также предложена для показанных на фиг.1 и 4 вариантов.
Кроме того, если в соответствующем варианте осуществления предусмотрен подходящий первый шарнир, положение которого может быть изменено, на соответствующем первом шарнире с изменяемым положением вместо второго шарнира может быть предусмотрено направляющее устройство, посредством которого соответствующий первый шарнир может быть расположен, направлен посредством этого устройства. В этом случае первый шарнир перемещается посредством исполнительного привода к определенному заранее положению посредством приводного устройства, которое сопряжено с соответствующим шарниром с изменяемым положением или первым шарниром, так что возможно установить предварительно заданное положение для шарнира с переменным положением в виде функции от заданного положения перемещения закрылка 2. Направляющее устройство может иметь направляющую линию, с помощью которой или посредством которой соответствующий шарнир с изменяемым положением или первый шарнир направляется посредством приводного устройства для изменения или перемещения положения шарнира. Направляющая линия может быть линейной или изогнутой либо линейной или изогнутой в разных местах. В частности, по меньшей мере местами направляющая линия может обладать круговой траекторией. Однако направляющее устройство может также иметь устройство сопряжения, посредством которого соответствующий шарнир с изменяемым положением механически сопряжен с соотнесенным вторым шарниром, который направлен по линии перемещения, так что положения первого и второго шарнира жестко сопряжены. Это устройство сопряжения может быть выполнено в виде рычага, рычажного механизма или трансмиссии, установленных или положение которых направлено, в сочлененной форме по направляющей линии.
В частности, если в этих вариантах осуществления отсутствует механическое сопряжение между приводным устройством и вторым шарниром направляющего устройства, положение соответствующего шарнира с изменяемым положением может быть изменено посредством контрольного устройства с устройством управления, при этом контрольное устройство принимает информацию о соответствующем положении закрылка 2 в качестве вводимой переменной и использует ее для определения заданных положений для соответствующего первого шарнира и, исходя из этого, отсылает соответствующую команду к приводному устройству. Эта команда используется для управления приводным устройством и перемещения первого шарнира в подходящее положение посредством направляющего устройства. Кроме того, в этом случае может быть предусмотрен датчик, который определяет положение соответствующего первого шарнира и передает величину, соответствующую этому положению, контрольному устройству, которое сравнивает положение первого шарнира в данный момент с заданным положением посредством реализованной в нем функции контроля, и в случае какого-либо расхождения между этими положениями формирует команды для помещения соответствующего первого шарнира в его заданное положение.
Эти варианты осуществления изобретения с направляющим устройством с / без контрольного устройства могут быть предусмотрены на одном или более шарнирах в увеличивающей подъемную силу крыла системе.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВКИ УВЕЛИЧИВАЮЩЕГО ПОДЪЕМНУЮ СИЛУ КРЫЛА ЗАКРЫЛКА | 2007 |
|
RU2446987C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ЗАКРЫЛКОВ ВЕЕРНОГО ТИПА КРЫЛА САМОЛЕТА | 2014 |
|
RU2539018C1 |
| АВИАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2429163C2 |
| УСТРОЙСТВО УВЕЛИЧЕНИЯ ПОДЪЕМНОЙ СИЛЫ САМОЛЕТА КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2561886C2 |
| УСТРОЙСТВО ВЫДВИЖЕНИЯ ЗАКРЫЛКА | 2015 |
|
RU2583239C1 |
| СИСТЕМА НАВЕСКИ ЗАКРЫЛКОВ КРЫЛА САМОЛЕТА | 2023 |
|
RU2819458C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ЗАКРЫЛКОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2728236C2 |
| УСТРОЙСТВО ДЛЯ СЛОЖНОГО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2575913C2 |
| СПОСОБ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ФАЗЕ ЗАХОДА НА ПОСАДКУ | 2007 |
|
RU2389647C1 |
| ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ДОПОЛНИТЕЛЬНЫМ ВОДОРОДНЫМ МОДУЛЕМ | 2014 |
|
RU2571153C1 |
Группа изобретений относится к области авиации. Увеличивающая подъемную силу крыла система по первому варианту имеет увеличивающий подъемную силу крыла закрылок (2), который расположен на крыле (1) летательного аппарата с возможностью поворота вокруг точек вращения (3) на крыле (1), или на каретке, или сопряженном с крылом рычаге. Закрылок (2) имеет возможность перемещения посредством приводного устройства между убранным положением (I), в котором закрылок (2) дополняет форму крыла, и несколькими выпущенными положениями (II, III), в которых между крылом (1) и закрылком (2) образована щель (4). Закрылок (2) расположен с углом относительно профиля крыла. Точка вращения (3), вокруг которой закрылок (2) имеет возможность поворота, расположена в изменяемом положении относительно крыла (1), или каретки, или сопряженного с крылом рычага. По второму варианту системы шарнир предусмотрен на кинематическом элементе для обеспечения дополнительного сочленения между закрылком (2) и кареткой, первым концом рычага или вторым концом рычага. Кинематический элемент выполнен с возможностью перемещения посредством приводного устройства для изменения положения одного из шарниров. Группа изобретений направлена на увеличение подъемной силы. 2 н. и 10 з.п. ф-лы, 4 ил.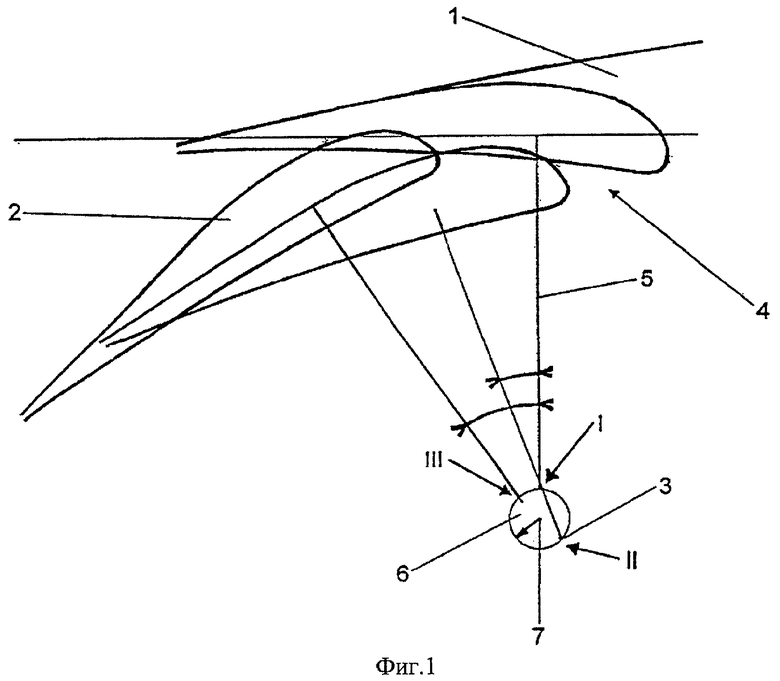
1. Увеличивающая подъемную силу крыла система для летательного аппарата, содержащая крыло (1) и увеличивающий подъемную силу крыла закрылок (2), который сопряжен с крылом (1) посредством механизма опускаемого шарнира для установки закрылка (2) в заданное положение по отношению к крылу и который выполнен с возможностью поворота посредством исполнительного привода между убранным положением (I), в котором закрылок (2) дополняет форму крыла, и несколькими выпущенными положениями (II, III), в которых между крылом (1) и закрылком (2) образована щель (4) заданной ширины,
при этом увеличивающая подъемную силу крыла система содержит приводимый в действие приводным устройством кинематический элемент (6), и при этом кинематический элемент (В) вращаемо сопряжен с крылом (1), обеспечивая вторую точку (7) вращения, которая неподвижно закреплена в заданном положении по отношению к крылу (1), при этом от второй точки (7) вращения посредством предварительно заданного расстояния отделена первая точка (3) вращения, отличающаяся тем, что
увеличивающая подъемную силу крыла система содержит рычаг (5) закрылка, который жестко соединен с закрылком (2), при этом второй конец рычага (5) закрылка вращаемо сопряжен с кинематическим элементом (6), обеспечивая первую точку (3) вращения,
рычаг (5) закрылка выполнен с возможностью поворота посредством исполнительного привода между убранным положением (I), в котором закрылок (2) дополняет форму крыла, и несколькими выпущенными положениями (II, III), в которых между крылом (1) и закрылком (2) образована щель (4) заданной ширины.
2. Увеличивающая подъемную силу крыла система по п.1, отличающаяся тем, что для регулирования закрылка (2) поворот рычага (5) закрылка и поворот кинематического элемента (6) увеличивающей подъемную силу крыла системы выполнены так, что
в убранном положении (2а) закрылка, соответствующем крейсерскому полету, первое положение закрылка (2) непрерывно дополняет форму крыла, первая точка (3) вращения принимает первое положение (I) относительно продольного направления (х) летательного аппарата и относительно вертикального направления (z) летательного аппарата,
в первом выдвинутом и соответствующем положению взлета положении (2b) закрылка (2) первая точка (3) вращения принимает второе положение (II), которое расположено под первым положением (I) относительно вертикального направления (z) летательного аппарата и перед первым положением (I) относительно продольного направления (х) летательного аппарата,
во втором выдвинутом и соответствующем положению приземления положении (2с) закрылка (2) первая точка (3) вращения принимает третье положение (III), которое расположено позади второго положения (II) относительно продольного направления (х) летательного аппарата и над вторым положением (II) относительно вертикального направления (z) летательного аппарата.
3. Увеличивающая подъемную силу крыла система по п.1, отличающаяся тем, что кинематический элемент (6) образован посредством рычага или эксцентрика.
4. Увеличивающая подъемную силу крыла система по п.1, отличающаяся тем, что приводное устройство и исполнительный привод выполнены с возможностью приведения в действие сочлененным образом.
5. Увеличивающая подъемную силу крыла система по п.1, отличающаяся тем, что приводное устройство и исполнительный привод выполнены с возможностью приведения в действие независимо.
6. Увеличивающая подъемную силу крыла система для летательного аппарата, содержащая крыло (1) и увеличивающий подъемную силу крыла закрылок (2), который сопряжен с крылом (1) посредством кинематики направляющая - заднее звено, содержащей каретку (9), с которой закрылок вращаемо сопряжен через первый шарнир (10), направляющую (8) для направления каретки (9), и рычаг (13), который первым концом соединен с закрылком (2), а вторым концом сопряжен с задним концом направляющей (8) через третий шарнир (12),
при этом закрылок (2) выполнен с возможностью перемещения посредством исполнительного привода между убранным положением (I), в котором закрылок (2) дополняет форму крыла, и несколькими выпущенными положениями (II, III), в которых между крылом (1) и закрылком (2) образована щель (4) заданной ширины, отличающаяся тем, что
по меньшей мере один из шарниров (10, 11, 12) предусмотрен на кинематическом элементе (6) для обеспечения дополнительного сочленения между закрылком (2) и кареткой (9), первым концом рычага (13) или вторым концом рычага (13), при этом кинематический элемент (6) выполнен с возможностью перемещения посредством приводного устройства для изменения положения по меньшей мере одного из шарниров (10, 11, 12).
7. Увеличивающая подъемную силу крыла система по п.6, отличающаяся тем, что рычаг (13) сопряжен первым концом с закрылком (2) через второй шарнир (11).
8. Увеличивающая подъемную силу крыла система по п.6, отличающаяся тем, что рычаг (13) первым концом жестко соединен с закрылком (2).
9. Увеличивающая подъемную силу крыла система по п.6, отличающаяся тем, что для регулирования закрылка (2) поворот рычага (5) закрылка и поворот кинематического элемента (6) увеличивающей подъемную силу крыла системы выполнены так, что
в убранном положении (2а) закрылка, соответствующем крейсерскому полету, первое положение закрылка (2) непрерывно дополняет форму крыла, по существу, без каких-либо зазоров, первая точка (3) вращения принимает первое положение (I) относительно продольного направления (х) летательного аппарата и относительно вертикального направления (z) летательного аппарата,
в первом выдвинутом и соответствующем положению взлета положении (2b) закрылка (2) первая точка (3) вращения принимает второе положение (II), которое расположено под первым положением (I) относительно вертикального направления (z) летательного аппарата и перед первым положением (I) относительно продольного направления (х) летательного аппарата,
во втором выдвинутом и соответствующем положению приземления положении (2с) закрылка (2) первая точка (3) вращения принимает третье положение (III), которое расположено позади второго положения (II) относительно продольного направления (х) летательного аппарата и над вторым положением (II) относительно вертикального направления (z) летательного аппарата.
10. Увеличивающая подъемную силу крыла система по п.6, отличающаяся тем, что кинематический элемент (6) образован посредством рычага или эксцентрика.
11. Увеличивающая подъемную силу крыла система по п.6, отличающаяся тем, что приводное устройство и исполнительный привод выполнены с возможностью приведения в действие сочлененным образом.
12. Увеличивающая подъемную силу крыла система по п.6, отличающаяся тем, что приводное устройство и исполнительный привод выполнены с возможностью приведения в действие независимо.
| WO 2005021375 A1, 10.03.2005 | |||
| СПОСОБ УБОРКИ ХЛОПКА И ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 1990 |
|
RU2038737C1 |
| АНТЕННЫЙ ШТАТИВ | 0 |
|
SU272396A1 |
| DE 10328540 A1, 10.02.2005 | |||
| GB1508389 A, 26.04.1978 | |||
| US4381093 A, 26.06.1983 | |||
| УСТРОЙСТВО ДЛЯ ВЫДВИЖЕНИЯ ЗАКРЫЛКА | 2001 |
|
RU2214347C2 |

