Перекрестная ссылка на связанные заявки на патент
Эта заявка на патент представляет собой частичное продолжение заявки на патент США №09/326362, зарегистрированной в Патентном ведомстве США 4 июня 1999 г.
Область техники
Настоящее изобретение в общем относится к обработке оптических изображений и, в частности, к описанию изображений оптическим путем таким образом, что их можно кодировать, хранить, искать, извлекать и/или сравнивать с другими изображениями.
Существующий уровень техники
В мире существуют сотни миллионов, возможно, миллиардов творческих произведений, которые выполнены в виде визуальных изображений или которые могут быть преобразованы в визуальные изображения. Такие творческие произведения могут включать, например, рисунки и картины художников, коммерческое искусство, чертежи, фотографии, кинокартины, записанные в цифровой форме фото- и видеоизображения, радиолокационные изображения, карты, изображения, созданные на компьютере, литературные работы, код компьютерной графики, звукозаписи и многое другое. Такие творческие произведения хранятся в библиотеках, базах данных, публичных и частных коллекциях и других местах по всему миру, и существует множество причин, по которым люди хотят их найти. Однако изображение гораздо труднее, чем, например, текст, описать объективным образом, независимо от видения и субъективной оценки человека. Следовательно, создание обширной базы данных для хранения и поиска большого количества изображений становится трудной задачей, и результаты находят ограниченное применение, даже если для облегчения работы используется компьютеризированные индексирование и поиск. Например, машина визуального поиска, разработанная компанией ditto.com (бывшая Arriba Soft Corp.), использует компьютерную программу "crawler" для путешествия по всемирной паутине (WWW), посещения web-сайтов в поиске изображений и копирования изображений вместе с любым связанным с ними текстом. Данные изображения затем уменьшаются в размере, индексируются текстом в соответствии с определенной тематической категорией, содержанием, характеристикой или тому подобным, сортируются и/или отбираются людьми ("человеческие фильтры") и вводятся в базу данных. Последующий доступ или поиск в базе данных производится путем ввода ключевого слова или фразы, которые должны представлять собой одно из ряда ключевых слов или фраз, выбранных создателем или оператором машины поиска для описания изображения в каталоге машины поиска. Например, человек, осуществляющий поиск, может ввести слово "бабочка" и, если машина поиска в базе данных располагает изображениями, индексированными словом "бабочка", машина поиска выведет эти изображения. Если поиск по условию "бабочка" дает слишком много результатов, например более трех тысяч изображений, то для сужения поля поиска можно добавлять другое слово, например "монарх", но только в том случае, если у создателя или оператора базы данных имеются изображения, индексированные словом "монарх". Слова "бабочка монарх" могут сузить поле поиска до, например, нескольких сотен изображений. А дальше уже дело за человеком - просмотреть все изображения, внесенные в каталог под словами "монарх" и "бабочка", для выяснения, имеется ли что-либо, представляющее интерес.
В конечном счете, поисковые возможности такой машины поиска ограничиваются: (i) словом (словами), которое создатель или оператор базы данных выбрал для описания изображения; (ii) ограниченным временем, которое у реальных людей имеется для просмотра изображений, присвоения ключевых слов для индексирования и ввода изображения с выбранными индексными словами в базу данных, насчитывающую в обычном случае до нескольких миллионов изображений; (iii) ограниченным количеством изображений, из имеющихся сотен миллионов или миллиардов, которое оператор решает проиндексировать и внести в базу данных; (iv) тем, что пользователь должен лично просмотреть представленные изображения; и (v) если пользователь хочет найти источник или местонахождение изображения, для которого в распоряжении пользователя имеется эталонное изображение, то ему приходится надеяться, что оператор машины поиска не исключил требуемое изображение, и пользователь должен сравнить изображения, предоставленные машиной поиска, с эталонным изображением.
Принадлежащая заявителю одновременно рассматриваемая заявка на патент США №09/326362, зарегистрированная 4 июня 1999 года, описывает, как можно находить изображения в различных базах данных, на различных серверах, web-сайтах и т.п., которые доступны при помощи или через сеть Интернет, и сравнивать их с эталонным изображением, используя способ оптической корреляции. Однако необходимость в проведении поиска во всех доступных источниках каждый раз, когда ищется совпадение для конкретного эталонного изображения, является не слишком желательным и эффективным. Однако все изображения, найденные во всех подобных доступных источниках, можно поместить в отдельную или центральную базу данных, чтобы затем осуществлять в этой базе данных каждый поиск совпадения с эталонным изображением. Такая схема могла бы устранить необходимость осуществления каждого поиска во всех доступных источниках. Однако многие изображения требуют сотен или тысяч килобайт данных, поэтому потребовался бы огромный объем памяти для хранения данных, чтобы собрать и хранить сотни миллионов или миллиардов изображений в одной базе данных, и просмотр всех таких изображений для каждого эталонного изображения был бы по-прежнему неэффективным даже в случае, если все изображения находятся в единой базе данных. Кроме того, попытки ограничить время поиска и потребности в ресурсах путем введения произвольных категорий, хотя, возможно, и выгодны в определенной степени, накладывают по меньшей мере несколько ограничений и вызывают неудобства, описанные выше применительно к устройствам поиска изображений типа предлагаемых ditto.corn. Находящаяся на одновременном рассмотрении и принадлежащая заявителю заявка на патент №09/326362 не рассматривают проблему, как изображения, найденные в указанных выше различных базах данных, на различных серверах, web-сайтах и т.п., могут быть описаны с использованием способа, требующего минимального количества данных или байт информации для легкого и управляемого хранения в базе данных, быстрого поиска и быстрого извлечения для сопоставления с эталоном.
Существует потребность в устройствах, имеющих более высокую степень автоматизации и высокую скорость, и способе описания изображений таким образом, чтобы эти изображения можно было хранить, искать, извлекать и сравнивать с эталонным изображением при минимальном, если таковое вообще имеется, человеческом вмешательстве или участии.
Сущность изобретения
Задача настоящего изобретения заключается в обеспечении усовершенствованного устройства и способа для описания изображений при помощи информации, которая является уникальной для каждого изображения и пригодна для кодирования, хранения и поиска в базе данных.
Более конкретной задачей настоящего изобретения является обеспечение способа осуществления быстрого описания форм, имеющихся в изображении, и кодирования таких характеристик, связанных с формами, с использованием минимального объема данных, в результате чего хранение, поиск и извлечение данных могут осуществляться быстро и без чрезмерных затрат вычислительной мощности и объема памяти компьютера.
Другой задачей данного изобретения является обеспечение автоматизированного поиска и извлечение изображения из базы данных, содержащей изображение, на основе эталонного изображения.
Эти и другие задачи, преимущества и обладающие новизной отличительные признаки данного изобретения частично изложены в приведенном ниже описании, а частично станут очевидны специалистам в данной области техники при изучении этого описания или могут быть поняты при реализации данного изобретения на практике. Упомянутые задачи и преимущества могут быть реализованы и достигнуты при помощи средств и в сочетаниях, конкретно указанных в пунктах приложенной Формулы изобретения.
Для решения указанных выше и других задач и в соответствии с целями настоящего изобретения, которые сформулированы и подробно здесь описаны, соответствующий данному изобретению способ содержит этап описания изображения с точки зрения его геометрии путем формирования оптического спектра преобразования Фурье для изображения с использованием светового излучения; пространственную фильтрацию светового излучения, исходящего от спектра преобразования Фурье с использованием поворота щели для формирования фильтрованного спектра светового излучения; измерения интенсивностей светового излучения при их распределении в фильтрованном спектре при дискретных угловых положениях упомянутой щели; и сохранения упомянутых интенсивностей светового излучения, измеренных в пространственном спектре, вместе с дискретным угловым положением щели, при котором эти интенсивности светового излучения измерены. Данное изобретение также содержит этап расщепления светового излучения, распределенного в фильтрованном спектре, на два луча для измерения двумя отдельными детекторными матрицами, имеющими разное положение относительно фильтрованного спектра для предотвращения потери интенсивностей светового излучения в пятнах или зонах этого излучения, которые пересекают границы между двумя или более отдельными фоточувствительными элементами в детекторной матрице. Упомянутые интенсивности могут измеряться относительно порогового уровня и сохраняться в базе данных только в случае, если они по меньшей мере достигают этого порогового уровня. К информации о повороте и интенсивности, хранящейся в массиве данных, может добавляться флаг, например, указывающий один или более уровней нелинейного искажения.
Для достижения указанных выше задач соответствующее данному изобретению устройство включает описатель геометрии оптического изображения, содержащий линзу Фурье формирования спектра преобразования Фурье для светового излучения, исходящего от изображения, в фокальной плоскости линзы; фильтр пространственных частот с вращающейся щелью, расположенный в фокальной плоскости упомянутой линзы для пропускания из спектра преобразования Фурье только светового излучения, соответствующего угловым положениям упомянутой щели; фотодетектор, установленный для измерения излучения, пропускаемого упомянутым фильтром пространственных частот; и пространственный модулятор света со связанным с ним источником когерентного излучения. Упомянутый пространственный модулятор света может управляться таким образом, чтобы формировать изображение с когерентным излучением от связанного с ним источника когерентного излучения и проецировать данное изображение с когерентным излучением через линзу Фурье. Упомянутый фотодетектор предпочтительно содержит две детекторных матрицы из отдельных фоточувствительных элементов, при этом расщепитель луча проецирует часть упомянутого фильтрованного спектра на одну из детекторных матриц, а другую часть - на другую детекторную матрицу. Упомянутые детекторные матрицы имеют разное положение относительно упомянутого фильтрованного спектра. Блок сравнения (или программное обеспечение, выполняющее функцию блока сравнения) выбирает интенсивность из измеренных в отдельном фоточувствительном элементе одной из упомянутых матриц и в кластере частично наложенных фоточувствительных элементов другой упомянутой матрицы. Таблица RIX-элементов базы данных используется для хранения интенсивностей вместе со значением поворота и, возможно, вместе с анализируемым флагом, таким как коэффициент нелинейного искажения.
Краткое описание чертежей
Сопровождающие чертежи, которые включены в данное описание и являются его частью, иллюстрируют предпочтительные варианты реализации настоящего изобретения и вместе с описанием служат для объяснения принципов данного изобретения.
На Фиг.1 представлена принципиальная схема блока описания оптического изображения, соответствующего настоящему изобретению;
на Фиг.2а-с показана взаимосвязь между вертикальным положением щели в фильтре пространственных частот (Фиг.2а) относительно форм, имеющихся в изображении (Фиг.2b), и результирующим фильтрованным спектром светового излучения (Фиг.2с);
Фиг.3а-с аналогична Фиг.2а-с, но угловое положение щели составляет приблизительно 50 градусов от вертикали;
Фиг.4а-с также аналогичны Фиг.2а-с, но щель повернута в горизонтальное положение;
на Фиг.5 представлено схематическое изображение имеющих разное положение наложенных детекторных матриц, соответствующих настоящему изобретению, которые используются для обнаружения фильтрованного спектра светового излучения;
на Фиг.6 показана увеличенная часть наложенных детекторных матриц, иллюстрирующая обнаружение пятен или областей светового излучения, которые пересекают границы между соседними фоточувствительными элементами;
на Фиг.7 представлена функциональная схема, иллюстрирующая сбор данных по идентификации изображения, а также данных поворота и интенсивности RIX для таблицы RIX-элементов;
на Фиг.8 представлено схематичное изображение блока сравнения сигналов интенсивности, предназначенной для выбора интенсивности из измеренных фоточувствительным элементом одной детекторной матрицы и четырьмя частично наложенными фоточувствительными элементами другой детекторной матрицы с целью включения в таблицу RIX-данных;
на Фиг.9а-b изображена часть таблицы RIX-данных, ячейки которой заполнены информацией о повороте, интенсивности и нелинейном искажении, предназначенной для точного поиска, и дополнительные ячейки которой заполнены флагами различных значений нелинейного искажения, предназначенными для менее точного поиска.
Предпочтительный вариант реализации изобретения
На Фиг.1 схематично показан блок 10 описания оптического изображения, предназначенный для описания, хранения и поиска оптических изображений по совокупности геометрических форм. Этот блок 10 описания оптического изображения описывает изображение в соответствии с формами, которые формируют изображение, и данное описание будет уникальным для изображения. Другие характеристики изображения, например цвет и/или текстура, созданные другим оптическим устройством, не являющимся частью данного изобретения, могут использоваться вместе с характеристиками формы, полученными в соответствии с данным изобретением для более полного описания и поиска изображения. Однако данное описание будет сосредоточено, в первую очередь, на описании формы изображения согласно настоящему изобретению.
Если говорить по существу, образец 12 изображения, который может быть получен из любого источника (например, сеть Интернет, электронная база данных, web-сайт, библиотека, сканер, фотография, кинопленка, радиолокационное изображение, электронная фото- или видеокамера и другие источники) вводится в блок 10 описания оптического изображения, что более подробно описано ниже. На Фиг.1 показано произвольное количество n других образцов 14,…, n изображения, ожидающих ввода в блок 10 описания оптического изображения в последовательности, указанной стрелками 16, 18. Ввод произвольного количества n таких последовательных изображений 12, 14,..., n может быть осуществлен вручную или, что предпочтительно, автоматическим путем, например, с использованием механического диаскопа, генератора изображений на основе компьютера, кинопроектора, фото- или видеокамеры или тому подобного. Прямоугольник 20 на Фиг.1 схематично представляет любое устройство, способное формировать очередь и перемещать изображение 12, 14,..., n в блок 10 описания оптического изображения. В последующем описании для удобства и простоты используется ссылка, по большей части, только на первое изображение 12, но при этом подразумевается, что оно применимо также к любому из изображений 12, 14,..., n.
Кроме того, несколько образцов 12, 14,..., n изображений вводятся в блок 10 описания оптического изображения в плоскости, которая перпендикулярна световому лучу 22, исходящему от облучателя 21 изображения, т.е. перпендикулярна плоскости Фиг.1. Однако для облегчения объяснения, иллюстрирования и понимания данного изобретения изображения 12, 14,..., n показаны спроецированными на плоскость, параллельную плоскости Фиг.1, т.е. параллельную плоскости бумаги. Эта же условность используется также при проецировании изображения 12’, спектра 32 преобразования Фурье, фильтра 54 пространственных частот, фильтрованного спектра 60 и детекторных матриц 82а, 82b из их соответствующих плоскостей, перпендикулярных световым лучам, на плоскость бумаги в целях объяснения, иллюстрирования и понимания. Эти компоненты и их функции в данном изобретении более подробно объяснены ниже.
Изображение 12, введенное в блок 10 описания оптического изображения, в оптическом виде проходит через ряд оптических элементов, которые более подробно описаны ниже. При этом изображение 12 будет подвергаться значительной трансформации при прохождении через тонкую собирающую линзу 30, также называемую фурье-преобразующей линзой или линзой Фурье. Преобразование Фурье, осуществляемое для образца 12’ изображения, реорганизует световое излучение изображения 12’ в спектр 32 преобразования Фурье, который возникает на фокальном расстоянии F линзы 30 (т.е. в фокальной плоскости), как показано на Фиг.1, и который уникален для изображения 12’ даже несмотря на то что он не воспринимается подобно изображению 12’ человеческим глазом. Световое излучение в области Фурье, т.е. в фокальной плоскости, может быть описано интенсивностями, т.е. амплитудами излучения, имеющегося в спектре 32 преобразования Фурье в различных пространственных положениях. Общее распределение амплитуд светового излучения 34 в спектре 32 представляет собой преобразование Фурье для общего распределения света в изображении 12’, которое является оптической копией изображения 12 в монохроматическом, предпочтительно когерентном световом излучении, что более подробно описано ниже. Концентрации сильного светового излучения в спектре 32 преобразования Фурье в основном соответствуют пространственным частотам изображения 12’, т.е. тому, как расположенные близко или на большом расстоянии элементы изображения 12’ сменяют друг друга или остаются неизменными. Например, рубашка из ткани "шотландка" (не показана), т.е. имеющая много небольших квадратов в изображении, находящемся в пространственной области, будет характеризоваться более высокой пространственной частотой, т.е. изменениями на единицу расстояния, чем гладкая одноцветная рубашка (не показана) в изображении, находящемся в пространственной области. Кроме того, части изображения, такие как детали 35 бампера и гриля автомобиля (облицовочная часть решетки), содержащиеся в изображении 12’, находящемся в пространственной области, будут характеризоваться более высокой пространственной частотой, чем зона крыла 36 изображения 12’ автомобиля, так как детали 35 бампера и гриля содержат много небольших элементов с различными краями, кривыми линиями и другими сложными переходами в пределах небольшого расстояния, в то время как крыло 36 является довольно гладким и ровным на большом расстоянии. Световое излучение от более мелких деталей изображения в пространственной области, например от более сложных деталей 35 бампера и гриля в изображении 12’, находящемся в пространственной области, будет распределяться при дисперсии дальше в радиальном направлении от оптического центра или оси 40 изображения, прошедшего преобразование Фурье, т.е. в области Фурье, чем световое излучение от более плавных или более плоских деталей изображения, например, крыла 36 в изображении 12’, находящемся в пространственной области. Амплитуда светового излучения 34, распределенного при дисперсии по радиусу в спектре 32 преобразования Фурье (в области Фурье), зависит от светового излучения соответствующих зон изображения 12’, находящегося в пространственной области, от которых такое световое излучение исходит, и, кроме того, такое световое излучение концентрируется в областях или в полосах 34 в плоскости спектра 32 преобразования Фурье после того как упомянутые зоны преломляются линзой 30 Фурье, т.е. в полосы сильного светового излучения, разделенные полосами слабого излучения или полосами с отсутствием излучения. Если зоны изображения 12’ с высокой пространственной частотой, например зона 35 бампера и гриля, являются яркими, то интенсивность или амплитуда светового излучения от этих зон изображения 12’ с высокой пространственной частотой, которые при преломлении линзой 30 Фурье формируют более удаленные в радиальном направлении полосы светового излучения 34 в спектре 32 преобразования Фурье, будет выше, т.е. излучение будет ярче. С другой стороны, если зоны изображения 12’ с высокой пространственной частотой являются темными, то интенсивность или амплитуда светового излучения от этих зон изображения 12’ с высокой пространственной частотой, которые при преломлении линзой 30 Фурье формируют более удаленные в радиальном направлении полосы светового излучения 34 в спектре 32 преобразования Фурье, будет ниже, т.е. излучение будет менее ярким. Подобным же образом, если зоны изображения 12’ с низкой пространственной частотой, например зона 36 крыла, являются яркими, то интенсивность или амплитуда светового излучения от этих зон изображения 12’ с низкой пространственной частотой, которые при преломлении линзой 30 Фурье формируют менее удаленные в радиальном направлении полосы светового излучения 34 в спектре 32 преобразования Фурье (т.е. расположенные ближе к оптической оси 40), будет выше, т.е. излучение будет ярче. Однако если зоны изображения 12’ с низкой пространственной частотой являются темными, то интенсивность или амплитуда светового излучения от этих зон изображения 12’ с низкой пространственной частотой, которые при преломлении линзой 30 Фурье формируют менее удаленные в радиальном направлении полосы светового излучения 34 в спектре’ 32 преобразования Фурье, будет ниже, т.е. излучение будет менее ярким.
В итоге спектр 32 преобразования Фурье для излучения, исходящего от изображения 12’: (i) уникален для изображения 12’, (ii) содержит области или полосы концентрированного светового излучения 34, распределенного при дисперсии в радиальном направлении от центра или оптической оси 40, которые представляют пространственные частоты, т.е. мелкость деталей, в изображении 12’, (iii) интенсивность или амплитуда светового излучения 34 в каждой области или полосе пространственной частоты в спектре 32 преобразования Фурье соответствует яркости или интенсивности светового излучения, исходящего от соответствующих мелких или крупных элементов изображения 12’, и (iv) для такого светового излучения 34 в областях или полосах спектра 32 преобразования Фурье можно измерить интенсивность и определить пространственное местоположение.
Однако, так как блок 10 описания характеристик оптического изображения, соответствующий настоящему изобретению, создан для описания изображения 12 по формам, которые составляют это изображение, то для обнаружения и фиксирования светового излучения, исходящего от более мелких деталей или частей этих более мелких деталей изображения 12’, которые имеют одинаковую линейную ориентацию при различных конкретных углах наклона, используется дополнительная пространственная фильтрация спектра 32 светового излучения, получаемого при преобразовании Фурье. Такая пространственная фильтрация может выполняться несколькими различными путями, что более подробно описано ниже, но примерный фильтр 50 пространственных частот, предназначенный для выполнения этой функции, конструктивно представляет собой удлиненную щель 52 в непрозрачном роторе 54, который размещен в фокальной плоскости линзы 30 Фурье (т.е. в области Фурье) и может вращаться вокруг оптической оси 40. Привод вращения, схематично изображенный на Фиг.1 как мотор 56 с приводным ремнем 58, установленным на роторе 54 фильтра пространственных частот, вращает этот ротор и, таким образом, щель 52 вокруг оптической оси 40, как показано стрелкой 59. На практике наряду с использованием привода, состоящего из мотора 56 и ремня 58, может также применяться и другое, более эффективное роторное устройство, например пневматический привод и воздушные подшипники (не показаны).
Через фильтр 50 пространственных частот могут проходить только порции светового излучения 34 из спектра 32 Фурье, которые лежат в плоскости щели 52. Такие порции светового излучения 34, которые проходят через фильтр 50 пространственных частот, представляют, т.е. исходят большей частью от деталей или элементов изображения 12’ (например, прямые линии и короткие сегменты кривых линий), линейная ориентация которых совпадает с угловым положением щели 52, что более подробно описано ниже. При распространении светового излучения 34, которое проходит через фильтр 50 пространственных частот, расположенный в области Фурье (т.е. в фокальной плоскости), обратно в пространственную область (например, расположенную на фокальном расстоянии F от фокальной плоскости), как показано на Фиг.1, результатом является фильтрованный спектр 60 из полос 62 светового излучения, который представляет уникальную комбинацию элементов или линий изображения 12’, которые имеют линейную ориентацию, как у щели 52 фильтра 50 пространственных частот.
Разумеется, по мере поворота щели 52 вокруг оптической оси 40, как показано стрелкой 59, щель 52 будет принимать положение, совпадающее с линейной ориентацией элементов или линий изображения 12’, расположенных под различными углами. Таким образом, полосы 62 преломленного светового излучения в фильтрованном спектре 60 будут изменяться вместе с поворотом щели 52 для отображения различных элементов, деталей или линий изображения 12’, расположенных в различных угловых положениях, сложность или мелкость, а также яркость, что более подробно рассмотрено ниже.
Прошедшее пространственную фильтрацию световое излучение в полосах 62 фильтрованного спектра 60 может измеряться одним или более фотодетекторами 80а, 80b в любом из различных угловых положений щели 52 и подаваться в электронной форме в компьютер 100 или другой микропроцессор для обработки и кодирования, что более подробно описано ниже. Согласно одной существенной, но не являющейся обязательной, отличительной особенности данное изобретение включает использование двух детекторных матриц 82а, 82b, состоящих соответственно из отдельных фоточувствительных преобразователей энергии 84а, 84b, но при этом одна из упомянутых матриц 82а, 82b смещена по сравнению с другой относительно оптической оси 40. Эта особенность облегчает обнаружение и запись всех подробностей фильтрованных спектров 60, и это происходит быстрее и с меньшими требующимися для обработки данных памятью или производительностью, чем в случае использования одной фотодетекторной матрицы, что более подробно рассмотрено ниже. Прошедший пространственную фильтрацию световой луч 61 расщепляется расщепителем 64 луча для посылки луча 61 на оба фотодетектора 80а, 80b, в результате чего фильтрованные спектры 60 обнаруживаются обеими детекторными матрицами 82а, 82b.
При вводе в компьютер 100 оптической информации о фильтрованных спектрах 60, т.е. распределения интенсивности (I) светового излучения от одной или двух детекторных матриц 82а, 82b вместе с информацией от устройства 20 обработки изображений об изображении 12 (например, идентификационного номера, указателя источника и т.п.) и информацией от фильтра 50 пространственных частот об угловом положении (R) щели 52, этот компьютер 100 может быть запрограммирован для кодирования характеристик изображения 12, относящихся к формах этого изображения. Одним из удобных форматов для кодирования такой информации является попиксельное кодирование фильтрованного изображения 60, включая информацию, касающуюся координат х, у каждого пикселя, поворота (т.е. углового положения щели 52 и, таким образом, линейных элементов изображения 12, ориентация которых совпадает с таким угловым положением) и интенсивности (т.е. амплитуды светового излучения от фильтрованного спектра 60), которая измеряется в каждом пикселе при угловом положении R. Может также вводиться анализируемый флаг, например коэффициент нелинейного искажения X, что более подробно рассмотрено ниже. Такая комбинация углового положения или поворота R, интенсивности I светового излучения для каждого пикселя и коэффициента нелинейного искажения Х может быть названа для краткости "RIX-элементом". Каждый RIX-элемент затем может быть связан с некоторым идентификатором изображения 12, из которого он получен (например, номером, названием или тому подобным), с местонахождением источника изображения 12 (например, URL-адресом Интернет, файлом базы данных, названием книги, владельцем изображения 12 и т.п.) и с любой другой требуемой информацией об изображении, такой как формат, разрешение, цвет, текстура или тому подобное. Некоторая из этой другой информации, например цвет и/или текстура, может представлять собой информацию, введенную из другой базы данных или даже из другого оптического описателя, который автоматически описывает то же изображение 12 в отношении цвета, текстуры или тому подобного - любого, что может оказаться полезным при поиске и нахождении изображения 12 или при сравнении изображения 12 с другими изображениями.
Некоторые, все или дополнительные комбинации такой информации о каждом изображении 12, 14,..., n, описанном с точки зрения его формы и закодированном, как изложено выше, могут посылаться компьютером 100 в одну или более баз 102 данных. Несколько примерных таблиц 104, 106, 108 базы данных для хранения RIX-информации о каждом изображении 12, 14,..., n показаны на Фиг.1, но также может использоваться и множество других структур и комбинаций информации.
В блоке 10 описания оптического изображения, изображенном на Фиг.1, изображение 12 воссоздается с использованием монохроматического, предпочтительно когерентного светового излучения, например как изображение 12’. Такое воссоздание изображения 12 в виде монохроматического оптического изображения 12’ может осуществляться с использованием пространственного модулятора 26 света, облучаемого лучом 24 когерентного излучения от лазерного источника 23, например лазерного диода или газотрона. Эта отличительная особенность данного изобретения может также быть реализована с использованием дневного света, хотя в этом случае получающиеся в результате спектр преобразования Фурье и спектр, прошедший пространственную фильтрацию, будут более нечеткими, чем при использовании монохроматического излучения. Таким образом, несмотря на то что дальнейшее описание изобретения основано на использовании монохроматического, предпочтительно когерентного излучения, необходимо понимать, что дневной свет является подходящей, хотя и не предпочтительной, заменой. Пространственный модулятор 26 света может быть оптически управляемым, таким как показанный на Фиг.1, или он может быть электрически управляемым и управляться, например, видеокамерой (не показана) или компьютером (не показан). Как известно специалистам в данной области техники, пространственный модулятор света может "записывать" изображение в поляризованный световой луч 25 путем вращения плоскости поляризации излучения в пространстве перпендикулярно лучу 25 для либо поглощения, либо пропускания поляризованного излучения или для частичного поглощения, либо частичного пропускания поляризованного излучения, в зависимости от того, что требуется для формирования изображения 12’ в монохроматическом излучении. В оптически управляемом пространственном модуляторе 26 света плоскость изображения формируется в пространстве световым излучением, падающим на полупроводниковый материал, расположенный в непосредственной близости от материала с вращением плоскости поляризации (обычно жидкого кристалла), в то время как в электрически управляемом пространственном модуляторе света (не показан) изображение формируется в жидкокристаллическом материале с вращением плоскости поляризации электрическим путем на попиксельной основе. В любом случае порции когерентного излучения, формирующего поляризованный луч 25, либо поглощаются, либо пропускаются жидкокристаллическим материалом, содержащимся в пространственном модуляторе 26 света. В некоторых пространственных модуляторах света, таких как оптически управляемый пространственный модулятор 26 света, показанный на Фиг.1, плоскость поляризации пропускаемых порций поляризованного излучения поворачивается на 45 градусов после однократного прохождения этого излучения через жидкокристаллический материал, после чего это излучение отражается и снова проходит через жидкий кристалл для поворота на следующие 45 градусов. Таким образом, свет в поляризованном луче 25, который не поглощается в пространственном модуляторе 26 света, отражается и выходит из этого модулятора по тому же оптическому пути 27, но в виде изображения 12’ и с плоскостью поляризации, повернутой на 90 градусов. Некоторые электрически управляемые пространственные модуляторы света функционируют почти таким же образом, т.е. пропуская поляризованное излучение дважды через жидкий кристалл с отражением в промежутке между этими двумя проходами, в то время как другие просто пропускают поляризованное излучение через жидкий кристалл один раз в одном направлении.
В варианте реализации настоящего изобретения, показанном на Фиг.1, луч 24 когерентного излучения от лазерного источника 23 проходит сначала через поляризатор 28 для формирования поляризованного луча 25, излучение в котором поляризовано в одной плоскости, например, но не подразумевая под этим ограничения, в плоскости s, как показано обозначением 25(s). Этот s-поляризованный луч затем проходит через фильтр 110 пространственных частот, в состав которого входят, по существу, точечная диафрагма 112 и линза 114, предназначенная для фокусировки луча 25 (s) в точечной диафрагме 112. Фильтр 110 пространственных частот предназначен, главным образом, для приведения луча 25 (s) в определенное состояние, для получения соответствующего Гауссовского волнового фронта и, если необходимо, ограничить силу луча 25 (s). Затем линза 114а формирует луч цилиндрической формы.
Луч 25 (s) затем проходит через поляризующий расщепитель 116 луча, который отражает излучение, поляризованное в одном направлении, на плоскости 118 и пропускает излучение, поляризованное в перпендикулярном направлении. В настоящем примере поляризующий расщепитель 116 луча отражает s-поляризованное излучение и пропускает р-поляризованное излучение и ориентирован таким образом, чтобы отражать s-поляризованный луч 25 (s) в направлении оптически управляемого пространственного модулятора 26 света.
В то же время световой луч 22 от излучателя 21, например лазерного диода или газового лазера, облучает изображение 12. Как упомянуто выше, существует много других способов считывания изображения 12 в блоке 10 описания оптического изображения, например, с использованием электронно-лучевой трубки, видеомонитора на основе пространственного модулятора света, механического диапроектора, кинопроектора и многих других устройство, что очевидно специалистам в данной области техники. Для получения изображение 12 показано на Фиг.1 нанесенным на диапозитив или пленку 120 и размещенным на опоре 122 на пути луча 22. Для достижения равномерного облучения изображения 12 перед пленкой 120 может устанавливаться пластина 124 рассеивателя света, например, изготовленная из матированного или травленого стекла. Луч 22, несущий изображение 12, затем проецируется (фокусируется) на оптически управляемый пространственный модулятор 26 света при помощи линзы 126. Возможна установка спектрального зеркала 128. Оно используется здесь для отклонения луча 22 с целью размещения формирующей оптики в более компактной конструкции.
Когда изображение 12 сфокусировано на пространственном модуляторе 26 света, этот модулятор переводит или "записывает" изображение 12 в луч 25 (s) монохроматического излучения, который испускается пространственным модулятором 26 света, как описано выше, с плоскостью поляризации луча, повернутой на 90 градусов. Таким образом, испускаемый луч 27 (р) когерентного излучения, несущий изображение 12’, является р-поляризованным, а не s-поляризованным. Затем луч 27 (р) монохроматического излучения с изображением 12’ вместо его отражения пропускается поляризующим расщепителем 116 луча в направлении линзы 30 Фурье.
Собирающая линза 30 Фурье, как рассмотрено выше, перераспределяет монохроматическое световое излучение изображения 12’ в спектр 32 преобразования Фурье, который возникает в фокальной плоскости линзы 30 Фурье. Следовательно, фильтр 50 пространственных частот с вращающейся щелью 52 должен размещаться в фокальной плоскости линзы 30 Фурье, как показано фокальным расстоянием F на Фиг.1. Как также рассмотрено выше, общее распределение амплитуды светового излучения 34 в спектре 32 преобразования Фурье в фокальной плоскости линзы 30 Фурье представляет собой преобразование Фурье для общего распределения амплитуды в изображении 12’. В спектре 32 преобразования Фурье все световое излучение изображения 12’ распределено симметричным образом в зависимости от пространственных частот в изображении 12’, при этом интенсивность светового излучения в полосах 34 распределения различных пространственных частот зависит от светового излучения в соответствующих зонах изображения 12’, где эти соответствующие пространственные частоты возникают. Спектр 32, как упомянуто выше, симметричен в направлениях сверху - вниз и слева - направо, в результате чего световое излучение в полукругах спектра 32 преобразования Фурье имеет строго одинаковые распределение и интенсивность. Световое излучение от зон изображения 12’ с более низкими пространственными частотами распределяется ближе к центру или оптической оси 40 спектра 32 преобразования Фурье, в то время как световое излучение от зон изображения 12’ с более высокими пространственными частотами распределяется дальше от оптической оси 40, по направлению к внешнему краю спектра 32. Световое излучение от элементов изображения 12’, которые распределены в вертикальном направлении и создают упомянутые различные пространственные частоты, подобным же образом распределено вертикально в спектре 32 преобразования Фурье. В то же время световое излучение от элементов изображения 12’, которые распределены в горизонтальном направлении и создают упомянутые различные пространственные частоты, подобным же образом распределено горизонтально в спектре 32 преобразования Фурье. Таким образом, в общем, световое излучение от элементов изображения 12’, которые расположены под любым углом относительно оптической оси 40 и создают различные пространственные частоты в изображении 12’, т.е. в пространственной области, также распределено под теми же самыми углами в спектре 32 преобразования Фурье, т.е. в области Фурье. Следовательно, при измерении только светового излучения, распределенного под конкретным углом относительно оптической оси 40 в спектре 32 преобразования Фурье, это измерение представляет собой характеристику элементов или деталей изображения 12’, которые линейно ориентированы под такими конкретными углами. Радиальные распределения такого обнаруженного светового излучения в области Фурье под каждым таким конкретным углом показывают сложность или четкость таких линейных элементов или деталей изображения 12’, находящегося в пространственной области, в то время как интенсивность такого обнаруженного светового излучения в области Фурье показывает яркость таких элементов или деталей в изображении 12’, находящемся в пространственной области.
Таким образом, комбинация измерений светового излучения при всех угловых положениях щели 52 в спектре 32 преобразования Фурье дает общую запись всех форм, т.е. угловых положений и сложности или четкости линейных элементов, которые составляют изображение 12’. Однако для большинства практических потребностей, таких как кодирование геометрических характеристик изображений 12, 14,..., n с целью сохранения в базе данных, поиска и извлечения, нет необходимости записывать такие измерения светового излучения для всех угловых положений щели 52 в спектре 32 преобразования Фурье. Обычно достаточно измерить и записать такие распределения и интенсивности светового излучения только для некоторых угловых положений в спектре 32 преобразования Фурье для получения достаточного описания форм для сохранения в базе данных, поиска и извлечения конкретных изображений 12, 14,..., n. Для рассмотрения принципов настоящего изобретения, но не подразумевая под этим ограничение, используются угловые приращения в 11,25 градуса, так как в 180 градусах поворота имеется шестнадцать (16) 11,25-градусных приращений, что обеспечивает определенные преимущества при обработке и хранении данных, как будет рассмотрено ниже. Однако могут также применяться и другие дискретные угловые приращения, включая постоянные или изменяющиеся. Разумеется, изменяющиеся приращения потребуют большей мощности компьютера и более сложного программного обеспечения для реализации функций обработки, хранения и поиска данных.
В предпочтительном варианте реализации настоящего изобретения фильтр 50 пространственных частот, имеющий щель 52, используется для того, чтобы позволить только световому излучению из заданных угловых положений в спектре 32 преобразования Фурье поступать в любой момент времени в детекторные матрицы 82а, 82b, расположенные на фокальном расстоянии F от фильтра 50 пространственных частот, что позволяет проецировать световое излучение 61, которое проходит через щель 52, находящуюся в области Фурье, обратно в пространственную область для выявления одним или обоими детекторами 80а, 80b части форм оптического изображения 12, содержащейся в таком световом излучении 61. Ротор 54 со щелью 52 вращается, как показано стрелкой 59, в результате чего детекторные матрицы 82а, 82b могут фиксировать распределение и интенсивность (I) светового излучения, исходящего от спектра 32 преобразования Фурье при любом угловом положении (R) щели 52. Эта функция для целей настоящего изобретения может также быть реализована рядом других способов. Например, в качестве фильтра 50 пространственных частот может быть использован электрический управляемый пространственный модулятор света (не показан), в этом случае включение и отключение ячеек пространственного модулятора света в определенной последовательности будет создавать фильтр пространственных частот, щель которого расположена под выбранными углами, что должно быть понятно специалистам в данной области техники.
Предпочтительная (но, однако, не являющаяся обязательной) форма щели 52 фильтра 50 пространственных частот - это узкий удлиненный прямоугольник, возможно с перекрытым центром 53, что описано ниже. Ширина щели 52 будет зависеть от имеющегося или требующегося светового излучения. Более широкая щель 52 позволит проходить большему количеству светового излучения 34, но при этом степень разрешения для линий или элементов изображений будет снижаться. Более узкая щель 52 будет обеспечивать лучшее линейное разрешение, но этому будет сопутствовать соответствующее повышение уровня геометрического обобщения и сложности для результирующего спектра. Таким образом, должен быть найден баланс между указанными функциями разрешающей способности и распознавания при выборе размера щели 52. Кроме того, чтобы зафиксировать формы, содержащиеся в изображении 12, отличные от линий, могут применяться щели других форм, например, овалы и т.п.
По мере поворота щели 52 компьютер 100 или какой-либо другой подходящий микропроцессор может записывать распределения и интенсивности светового излучения, выявленные детекторными матрицами 82а, 82b, в любой момент, когда щель 52 находится в угловом положении R, создаваемым выбранными приращениями. Например, 11,25-градусные приращения, задающие повороты 11,25°, 22,5°,..., 180°, будут эффективны при выявлении всех 11,25-градусных приращений углового положения в полном круге 360°. Хотя в этом и нет необходимости, может оказаться желательным перекрыть центр щели 52 поблизости от оптической оси 40, так как световое излучение в спектре 32 преобразования Фурье поблизости от центра 40 в обычном случае будет наиболее сильным, но не будет представлять линейные элементы или детали изображения 12’, характеризующие формы, содержащиеся в этом изображении. Таким образом, чтобы более полно использовать уровни чувствительности в детекторных матрицах 82a, 82b, которые необходимы для правильного и точного измерения более слабого светового излучения в распределенных при дисперсии на более удаленное в радиальном направлении от центра расстояние зонах спектра 32 преобразования Фурье, которые описывают формы, составляющие изображение 12’, может оказаться полезным маскировать или отфильтровывать более сильное световое излучение, имеющееся вблизи центра 40 спектра 32 преобразования Фурье.
Описанный выше процесс пространственной фильтрации при вращении изображен более подробно на Фиг.2а-с, 3а-с и 4а-с. Например, когда ротор 54 фильтра 50 пространственных частот вращается, как показано стрелкой 59, в результате чего щель 52 принимает вертикальное положение, показанное на Фиг.2а как 0°, щель 52 пропускает только часть светового излучения 54 в спектре.32 преобразования Фурье (см. Фиг.1 - на Фиг.2а этот спектр скрыт за ротором 54), лежащую в плоскости щели 52 на детекторные матрицы 82а, 82b (Фиг.1). Это световое излучение 34, которое при дисперсии в спектре 32 преобразования Фурье (Фиг.1) распределяется по вертикали, первоначально исходит от всех по существу вертикально ориентированных элементов или деталей изображения 12’ (и соответствует им), например от по существу вертикальных линий 66, 66’, показанных на Фиг.2b. Как рассмотрено выше, световое излучение 34 от более сложных или близко расположенных вертикальных частей или линий 66 (т.е., имеющих более высокую пространственную частоту), подобных находящимся в зоне 35 бампера и гриля на изображении 12’, при дисперсии распределяется в радиальном направлении дальше от оптического центра или оси 40, в то время как световое излучение 34 от менее сложных или дальше расположенных друг от друга вертикальных частей или линий (т.е., имеющих более низкую пространственную частоту), например от по существу вертикальных частей или линий 66’, находящихся в зонах багажника и заднего бампера на изображении 12’, показанном на Фиг.2b, при дисперсии распределяется не так далеко от оптического центра или оси 40. Интенсивность светового излучения 34 в этих полосах дисперсии, как рассмотрено выше, зависит от яркости соответствующих вертикальных элементов 66, 66’ изображения 12’. Снова заметим, что центральная часть 53 ротора 54 может быть закрыта, если требуется, так как световое излучение 34 в центре 40 спектра 32 преобразования Фурье или поблизости от этого центра (Фиг.1) исходит от элементов изображения 12’с очень низкими пространственными частотами (например, от общей яркости изображения), которые вносят очень небольшой вклад, если таковой вообще имеется, в формирование форм.
Как также кратко рассмотрено выше, световое излучение 34, которое проходит через щель 52 (и которое описывает вертикально ориентированные элементы, части или линии 66, 66’ изображения 12’), когда щель 52 ориентирована вертикально, как показано на Фиг.2а, распределяется щелью 52 в процессе дифракции и проецируется при помощи расщепителя 64 луча на две детекторных матрицы 82а, 82b, которые расположены на фокальном расстоянии F (определяемом фурье-преобразующей линзой 30) от фильтра 50 пространственных частот для обнаружения светового излучения, пропускаемого фильтром 50 пространственных частот после того, как это излучение проходит обратно в пространственную область. Дифракция светового излучения 34 щелью 52 перераспределяет световое излучение 34, проходящее через щель 52, в по существу вертикально ориентированные полосы 62 дифракционного спектра 60, как показано на Фиг.2с, в детекторных матрицах 82а, 82b (Фиг.1). При перераспределении светового излучения в полосы 62, как показано на Фиг.2с, оно по-прежнему уникальным образом характеризует совокупность форм, пропущенных фильтром 50 пространственных частот, которая содержится в изображении 12’. Таким образом, полосы 62 светового излучения, показанные на Фиг.2с, обнаруживаются детекторными матрицами 82а, 82b для записи характеристики изображения 12’ по вертикально ориентированным формам, что более подробно описано ниже.
Как упомянуто выше, щель 52 фильтра 50 пространственных частот поворачивается, как показано стрелкой 59. Угловое положение щели 52, показанной на Фиг.3а, составляет приблизительно 45 градусов от вертикали. При таком повернутом на 45 градусов угловом положении R световое излучение 34, проходящее через щель 52, соответствует всем элементам, частям или линиям 67 изображения 12’, которые расположены под углом приблизительно 45 градусов к вертикали, как показано на Фиг.3b. Участки криволинейных элементов, частей или линий 67’ изображения 12’, которые ориентированы под углом приблизительно 45 градусов к вертикали, также вносят свой вклад в формирование светового излучения 34, которое проходит через щель 52 при ее повороте на приблизительно 45 градусов от вертикали, как показано на Фиг.3а. Полосы 62 светового излучения в фильтрованном спектре 60, показанном на Фиг.3с, возникающие при 45-градусном угловом положении щели 52, показанном на Фиг.3а, также ориентированы под углом приблизительно 45 градусов к вертикали и характеризуют геометрические элементы 67, 67’ изображения 12’, ориентированные под углом приблизительно 45 градусов к вертикали. Таким образом, обнаружение полос 62 светового излучения, показанных на Фиг.3с, детекторными матрицами 82а, 82b облегчает кодирование и запись ориентированных под углом 45 градусов геометрических характеристик изображения 12’, что описано ниже.
Подобным же образом, когда щель 52 повернута в положение 90 градусов от вертикали, т.е. в горизонтальное положение, как показано на Фиг.4а, световое излучение 34, проходящее через щель 52, является характеристикой всех по существу горизонтальных элементов, частей и линий 68 изображения 12’, как показано на Фиг.4b. Участки криволинейных элементов, частей или линий 68’изображения 12’, которые являются по существу горизонтальными, также вносят свой вклад в создание светового излучения 34, проходящего через горизонтальную щель 52, показанную на Фиг.4а. Полосы 62 светового излучения в фильтрованном спектре 60, показанные на Фиг.4с, возникающие при горизонтальном положении щели 52, показанном на Фиг.4а, также ориентированы по существу горизонтально и характеризуют геометрические элементы 68, 68’ изображения 12’, которые ориентированы по существу горизонтально. Таким образом, обнаружение полос 62 светового излучения, показанных на Фиг.4с, детекторными матрицами 82а, 82b облегчает кодирование и запись горизонтальных геометрических характеристик изображения 12’, что описано ниже.
К данному моменту должно стать понятным, что любое конкретное угловое положение R щели 52 позволит обнаружить все формы изображения 12’, которые имеют по существу то же угловое положение R. Таким образом, общая характеристика формы изображения 12’ может быть получена путем обнаружения полос 62 фильтрованного спектра 60 при всех угловых положениях щели 52. Однако, как упомянуто выше, для большинства задач достаточно обнаружить некоторые, предпочтительно большую часть, но не обязательно все из характеристик формы изображения 12’ путем избирательного обнаружения полос 62 светового излучения в фильтрованном спектре 60 при определенных значениях поворота R, изменяющихся на величину выбранного приращения, т.е. при определенных угловых положениях щели 52. Очевидно, что чем больше приращения при изменении углового положения щели 52, при которых обнаруживаются полосы 62 светового излучения, тем менее точным будет определение характеристики формы изображения 12’. С другой стороны, чем меньше приращения при изменении углового положения, тем больше данных предстоит обработать. Таким образом, при выборе приращений для задания угловых положений щели 52, в которых будут обнаруживаться и записываться полосы 60 светового излучения может оказаться желательным нахождение определенного баланса между точностью требуемой или требуемой характеристикой формы и скоростью, а также эффективностью обработки и сохранения данных, требующихся для достижения такой точности. Например, но не подразумевая под этим ограничение, считается, что для большинства задач будет адекватным определение и запись характеристики формы при приращениях угла поворота щели 52, меняющихся в диапазоне приблизительно от 5 до 20 градусов, предпочтительно при приращении приблизительно 11,25 градуса.
Разумеется, необходимо обнаружить и записать только полосы 62 светового излучения при задаваемых выбранным приращением угловых положениях щели 52 в пределах 180 градусов, т.е. половины полного вращения, так как, как показано на Фиг.2а, 3а и 4а, щель 52 простирается по радиусу в противоположных направлениях от оптической оси 40. Следовательно, когда один конец щели 52 поворачивается от 0 до 180 градусов, противоположный конец щели 52 поворачивается от 180 до 360 градусов. Таким образом, при обнаружении полос 62 светового излучения для выбранных приращений поворота в пределах 180 градусов определяются все геометрические характеристики формы изображения 12’ для выбранных угловых положений, задаваемых выбранными приращениями поворота.
В предпочтительном варианте реализации данного изобретения ротор 54 со щелью 52 может вращаться непрерывно. Во время первой половины каждого оборота, т.е. в пределах 180 градусов, полосы 62 светового излучения обнаруживаются и записываются при каждом выбранном приращении или угловом положении, например при каждом приращении поворота, составляющем 11,25 градуса. Затем во время второй половины каждого оборота устройство 20 обработки изображений подает следующее изображение 14 в блоке 10 описания оптического изображения, как показано стрелкой 16 на Фиг.1. После чего по мере поворота щели 52 на половину оборота для изображения 14 выполняется описанный выше процесс определения и описания формы. Во время следующей половины оборота в блоке 10 описания оптического изображения подается следующее изображение, и этот процесс указанным образом может повторяться в цикле неопределенное время до тех пор, пока для описания, кодирования и записи имеются дополнительные изображения n.
Как упомянуто выше, обнаружение полос 62 светового излучения в фильтрованных изображениях 60 для каждого углового положения щели 62 может осуществляться с использованием любого фотодетектора, который имеет способность измерять и выводить электрические сигналы, характеризующие интенсивность светового излучения, в пространственной форме, например попиксельно. Например, могут быть использованы видеокамера или электронная фотокамера с прибором с зарядовой связью (CCD), что вполне понятно специалистам в данной области техники.
Тем не менее, другой отличительной особенностью настоящего изобретения является использование двух фотодетекторов 80а, 80b, показанных на Фиг.1, каждый из которых содержит небольшую матрицу 82а, 82b соответственно из фоточувствительных элементов или преобразователей 84а, 84b, которые образуют пиксели. Данные два фотодетектора 80а, 80b можно для удобства иногда в совокупности называть фотодетектором. Одна из фотодетекторных матриц 82b смещена по сравнению с другой фотодетекторной матрицей 82а относительно оптической оси 40 на половину пикселя по вертикали и на половину пикселя по горизонтали. Такое размещение двух небольших фотодетекторных матриц 82а, 82b в комбинации с соответствующим программным обеспечением повышает точность определения интенсивности и пространственного распределения светового излучения при минимальных требованиях по обработке данных.
Если обратиться теперь, в первую очередь, к Фиг.1, то в предпочтительном варианте реализации настоящего изобретения для измерения светового излучения 62 в фильтрованном спектре 60 используются две детекторных матрицы 82а, 82b, хотя может быть также использован один фотодетектор с матрицей из фотодетекторных элементов. Две детекторных матрицы 82а, 82b изображены на Фиг.1 как части двух отдельных фотодетекторов 80а, 80b, хотя в целом блок фотодетекторов 80а, 80b с соответствующими матрицами может представлять собой одно фотодетекторное устройство и иногда в совокупности называется в настоящем описании фотодетектором в общем смысле этого слова для одновременного обозначения как единичного, так и составного фотодетекторного устройства. Преимущество использования двух детекторных матриц 82а, 82b заключается в том, что при разном положении фоточувствительных элементов 84а, 84b матриц 82а, 82b относительно оптической оси 40 или фильтрованного спектра 60, а также при наличии довольно простого блока сравнения или простого по алгоритму программного обеспечения, интенсивность светового излучения 62 в различных местах фильтрованного спектра 60 может измеряться с достоверностью и точностью, достаточными для описания изображения в соответствии с настоящим изобретением, но при использовании объема данных меньшего, чем потребовался бы для обычно применяемой одной фотодетекторной матрицы.
Как рассмотрено выше, дифрагированный луч 61, несущий фильтрованный спектр 60, расщепляется расщепителем 64 луча, например полуотражающим зеркалом, таким образом, чтобы в предпочтительном случае (что не является обязательным) примерно половина светового излучения дифрагированного луча 61 передавалась как лучевой сегмент 61а в первую детекторную матрицу 82 а, а другая половина светового излучения фильтрованного луча 61 отражалась как лучевой сегмент 61b на вторую детекторную матрицу 82b. Оба лучевых сегмента 61а, 61b несут фильтрованный спектр 60, в котором световое излучение 62 в процессе фильтрации распределено в полосы, уникальные для изображения 12’, как рассмотрено выше. Если световое излучение в луче 61 не расщепляется пополам на лучевые сегменты 61а, 61b, то характеризующие интенсивность выходные сигналы фоточувствительных элементов 84а, 84b одной или другой из матриц 82a, 82b должны быть отрегулированы по уровню аппаратным или программным путем, чтобы позволить провести сравнение интенсивностей и выбрать интенсивности для сохранения в качестве данных, эти сравнение и выбор более подробно описаны ниже. Обе детекторных матрицы 82а, 82b размещены на одинаковом оптическом расстоянии F от фильтра 50 пространственных частот, в результате чего в обе эти матрицы поступают фактически идентичные распределения светового излучения 62 в пространственной области. Однако один из фотодетекторов 80а, 80b смещен по сравнению с другим относительно оптической оси 40. Например, как показано на Фиг.1, осевая линия 86а фотодетектора 80а совпадает с оптической осью 40 лучевого сегмента 61а, а осевая линия 86b фотодетектора 80b смещена относительно оптической оси 40 лучевого сегмента 61b, как показано стрелками 88, 89. Если говорить более конкретно, то, как изображено при помощи схематичного проецирования детекторных матриц 82а, 82b во взаимно наложенное состояние (при этом первая детекторная матрица 82а фактически перекрывает вторую фотодетекторную матрицу 82b в плоскости рисунка), вторая детекторная матрица 82b смещена по вертикали на расстояние, равное половине ширины фоточувствительного элемента 84а, 84b, как показано стрелкой 88, и дополнительно смещена по горизонтали на расстояние, равное половине высоты фоточувствительного элемента 84а, 84b, как показано стрелкой 89. Таким образом, отдельный фоточувствительный элемент 84а матрицы 82а фактически частично наложен на четыре (4) соседних фоточувствительных элемента 84b детекторной матрицы 82b.
Таким образом, как видно из увеличенного схематичного наложения детекторных матриц 82а, 82b, приведенного на Фиг.5 одновременно с изображением фильтрованного спектра 60, на соответствующие отдельные фоточувствительные элементы 84а, 84b соответствующих детекторных матриц 82а, 82b падает разное световое излучение 62. Например, когда в детекторные матрицы 82а, 82b поступает фильтрованный спектр 60, показанный на Фиг.3с (т.е. щель 52 на Фиг.3а повернута на 45 градусов), то, как показано на Фиг.5, световое излучение 62, падающее на фоточувствительный элемент 84а в столбце 7а и строке 6а детекторной матрицы 82а будет отличаться от светового излучения 62, падающего на соответствующий фоточувствительный элемент 84b в столбце 7b и строке 6b детекторной матрицы 82b. Фактически, как показано в примере на Фиг.5, световое излучение 62, падающее на фоточувствительный элемент 84а в столбце 7а и строке 6а детекторной матрицы 82а будет меньше светового излучения 62, падающего на соответствующий фоточувствительный элемент 84b в столбце 7b и строке 6b детекторной матрицы 82b. Разумеется, местоположение каждого фоточувствительного элемента 84а, 84b относительно падающего светового излучения будет меняться для различных фильтрованных спектров 60, полученных при различных угловых положениях щели 52 для одного и того же изображения 12’, и также будет меняться для различных фильтрованных спектров 60, полученных для различных оригинальных изображений 12, 14,..., n (Фиг.1), описанных при помощи блока 10 описания оптического изображения. Тем не менее различные интенсивности светового излучения, падающего на частично наложенные фоточувствительные элементы 84a, 84b соответствующих взаимно смещенных детекторных матриц 82а, 82b, используются, согласно настоящему изобретению, для кодирования и сохранения геометрических характеристик изображений 12, 14,..., n эффективным образом и с достаточным объемом данных, что более подробно описано ниже.
В целях разъяснения принципов настоящего изобретения, и не подразумевая под этим ограничение, в последующем описании использованы детекторные матрицы 82а, 82b, состоящие из 16 столбцов и 16 строк соответственно фоточувствительных элементов 84а, 84b для эффективного использования байтов информации и емкости базы данных. Фоточувствительные элементы 84а, 84b могут представлять собой фотодиоды, фотоэлементы или любое другое фоточувствительное устройство, которое формирует электрический сигнал, например сигнал напряжения, который характеризует интенсивность светового излучения, падающего на фоточувствительный элемент. Напряжение или другой параметр сигнала на выходе каждого фоточувствительного элемента 84а, 84b в каждой матрице считывается индивидуально, что хорошо известно специалистам в данной области техники, кроме того, блоки обработки электрических сигналов, предназначенные для считывания, обработки и записи таких сигналов, поступающих из матриц фоточувствительных элементов, также хорошо известны специалистам в данной области техники. Поэтому для описания или понимания настоящего изобретения нет необходимости в последующем рассмотрении фоточувствительных элементов или электрических схем для считывания, обработки и записи информации, поступающей от матриц фоточувствительных элементов.
Кроме того, в целях разъяснения принципов настоящего изобретения, но не подразумевая под этим ограничение, интенсивности светового излучения 62, поступающего в фоточувствительное устройство, могут (но не обязательно) записываться для 11,25-градусных угловых приращений поворота щели 52 фильтра 50 пространственных частот в пределах 180 градусов поворота, как описано выше. Использование 11,25-градусных угловых приращений является преимущественным для сбора достаточного количества данных, связанных с формой, для каждого изображения 12, 14,..., n, чтобы обеспечить быстрые, информативные и эффективные описания, хранения, поиск и извлечения изображений, при этом частным от деления 180 градусов на 11,25 градуса является 16, что позволяет эффективно использовать для работы с информацией битовую разрядность и байтовое сохранение данных. Однако в настоящем изобретении для более или менее точного описания формы могут, несомненно, использоваться и другие угловые приращения, а также другие размеры фоточувствительных матриц.
Смещенные друг относительно друга детекторные матрицы 82а, 82b повышают точность измерения светового излучения на поэлементной основе при относительно небольшом количестве больших фоточувствительных элементов 84а в детекторной матрице 82а, например только при 256 фоточувствительных элементах 84а в детекторной матрице 82а размером 16×16.
Согласно предпочтительному варианту реализации настоящего изобретения, для каждого углового положения щели 52 можно записать только интенсивности светового излучения для 256 зон, т.е. для матрицы 16×16. Так как количество фоточувствительных элементов 84а в детекторной матрице 82а размером 16×16 является относительно небольшим, то фрагмент поверхностной области фильтрованного спектра 60, в котором каждый фоточувствительный элемент 84а измеряет световое излучение 62, является относительно большим. Очевидным преимуществом меньшего количества фоточувствительных элементов 84а, каждый из которых измеряет световое излучение в относительно большем фрагменте фильтрованного спектра 60, по сравнению с традиционными измерениями фотоэффекта с использованием детекторных матриц с большим числом фоточувствительных элементов, например матриц CCD размером 256×256, является то, что формируется гораздо меньше данных и, таким образом, гораздо меньше данных предстоит обработать. Недостатком с точки зрения данного варианта применения, т.е. описания изображений по совокупности форм, является вероятность того, что некоторые небольшие по площади, но обладающие высокой интенсивностью участки или распределения светового излучения в фильтрованном спектре 60 могут поступать на небольшие участки или поверхностные области более чем одного фоточувствительного элемента 84а, что приведет к распределению сильного светового излучения по нескольким фоточувствительным элементам 84а вместо одного.
Такие пятна или зоны с высокой интенсивностью важно обнаружить, но когда световое излучение распределяется по нескольким фоточувствительным элементам 84а, приводя к делению сильного светового излучения между двумя или более фоточувствительными элементами 84а, характеризующие интенсивность выходные сигналы будут ниже, чем в случае, когда все световое излучение поступает в один фоточувствительный элемент. Поступления из нескольких фоточувствительных элементов 84а таких более низких результирующих выходных сигналов, характеризующих интенсивность, и являющаяся следствием этого невозможность зафиксировать и записать световое излучение высокой интенсивности, реально поступающее в детекторную матрицу, может привести к потере существенной информации о формах изображения 12’, т.е. ярких, четких деталей или линий изображения 12’.
Чтобы проиллюстрировать эту проблему и ее решение в соответствии с настоящим изобретением, обратимся в первую очередь к Фиг.6, которая представляет собой увеличенное изображение нескольких фоточувствительных элементов 84а детекторной матрицы 82а, фактически перекрывающих несколько смещенных фоточувствительных элементов 84b детекторной матрицы 82b, как описано выше. При рассмотрении Фиг.6 будут сделаны некоторые дополнительные ссылки на компоненты или особенности, изображенные на Фиг.1-5 и описанные ранее, поэтому обращение к этим фигурам также будет полезным. На Фиг.6 в полосе 62 светового излучения имеется концентрация или зона 63 сильного светового излучения, которая пересекает границы 92, 94, 96, 98 между четырьмя отдельными фоточувствительными элементами 84а детекторной матрицы 82а, эти четыре фоточувствительных элемента 84а находятся в столбце 5а, строке 3а; столбце 6а, строке 3а; столбце 5а, строке 4а и столбце 6а, строке 4а. Эти четыре фоточувствительных элемента 84а обозначены для удобства как C5a-R3a, C6a-R3a, C5a-R4a и C6a-R4a, где С означает столбец и R означает строку. Таким образом, при очень небольшом количестве светового излучения, падающего на оставшуюся поверхность этих четырех фоточувствительных элементов, электрические сигналы, формируемые каждым из этих фоточувствительных элементов 84а, расположенных в C5a-R3a, C6a-R3a, C5a-R4a и C6a-R4a, будут показывать гораздо меньшую интенсивность светового излучения, чем реально приходится на это пятно или зону 63.
Однако, как было рассмотрено выше, только половина светового излучения, пропускаемого фильтром 50 пространственных частот в луче 61 (Фиг.1), проецируется в луч 61а, идущий к детекторной матрице 82а. Другая половина светового излучения в луче 61 проецируется расщепителем 64 луча в луч 61b, идущий к детекторной матрице 82b. Кроме того, как рассмотрено выше, детекторная матрица 82b смещена по вертикали и горизонтали на половину размера фоточувствительного элемента 84а, 84b, как показано на Фиг.1 вертикальным смещением 88 и горизонтальным смещением 89. Следовательно, как показано при помощи наложения частей соответствующих детекторных матриц 82а, 82b в увеличенном масштабе, соответствующее пятно или зона 63 сильного светового излучения в луче 61 попадает большей частью в границы одного фоточувствительного элемента 84b, который находится в столбце 5b, строке 3b (т.е. C5b-R3b) детекторной матрицы 82b. Поэтому электрический сигнал, поступающий из фоточувствительного элемента C5b-R3b детекторной матрицы 82b, будет в гораздо большей степени характеризовать высокую интенсивность светового излучения в пятне или зоне 63, чем электрические сигналы, созданные любым из четырех фоточувствительных элементов детекторной матрицы 82а, расположенных в C5a-R3a, C6a-R3a, C5a-R4a и C6a-R4a. Важно выявить и записать такое световое излучение с более высокой интенсивностью в пятне или зоне 63 фильтрованного спектра 60, так как такое световое излучение с более высокой интенсивностью представляет особенно яркий элемент, деталь или линию изображения 12’ (Фиг.1), линейная ориентация которой совпадает с угловым положением щели 52 (Фиг.2-4), когда световое излучение в пятне или зоне 63 обнаруживается детекторными матрицами 82а, 82b.
Согласно предпочтительному варианту реализации настоящего изобретения, что лучше всего видно из Фиг.7 при рассмотрении совместно с Фиг.5 и 6, база 130 данных (называемая здесь также таблицей RIX-элементом) имеет ту же конфигурацию, что и одна из детекторных матриц 82а, 82b. В целях рассмотрения принципов настоящего изобретения таблица RIX-элементов 130 для соответствия детекторной матрице 82а фоточувствительных элементов 84а, имеющей размер 16×16, представляет собой массив 16×16. Таким образом, имеется ячейка или позиция 131 RIX-элемента (иногда называемая приемником), которая соответствует каждому фоточувствительному элементу 84а детекторной матрицы 82а. Поэтому, например, интенсивность I, ассоциированная с фоточувствительным элементом 84а, расположенным в C7a-R5a детекторной матрицы 82а, будет записываться в соответствующую ячейку или приемник 131, расположенную в C7-R5 таблицы RIX-элементов 130. Предыдущее предложение относится к интенсивности I, "ассоциированной с" конкретным фоточувствительным элементом вместо "соответствующей" конкретному фоточувствительному элементу, так как интенсивность I, записанная в ячейку 131 таблицы RIX-элементов, не обязательно может представлять собой уровень сигнала, сформированного соответствующим фоточувствительным элементом 84а детекторной матрицы 82а. Это может быть уровень сигнала, сформированного одним из частично наложенных фоточувствительных элементов 84b детекторной матрицы 82b, если один или более из этих частично наложенных фоточувствительных элементов 84b формируют сигнал с уровнем более высоким, чем соответствующий фоточувствительный элемент 84а детекторной матрицы 82а.
При каждом выбранном угловом положении щели 52 только необходимое число ячеек или приемников 131 данных выделяется в таблице RIX-элементов 130 для приема сигналов интенсивности от того же числа фоточувствительных элементов 84а, которые имеются в одном массиве 82а. Однако чтобы получить информацию об излучении высокой интенсивности, которая в противном случае может быть потеряна, перед тем как величина электрического сигнала, поступающего из каждого фоточувствительного элемента 84а детекторной матрицы 82а, записывается на постоянной основе, она сравнивается с сигналами, созданными каждым из частично наложенных фоточувствительных элементов 84b детекторной матрицы 82b. Сигнал наивысшей интенсивности, найденный при этом сравнении, является сигналом, который выбирается для возможного постоянного хранения в таблице RIX-элементов 130. Например, пятно или зона 63 высокой интенсивности, изображенная на Фиг.6, будет приводить к созданию фоточувствительным элементом 84b, расположенным в C5-R3 детекторной матрицы 82b сигнала высокого уровня (интенсивности), в то время как каждый из четырех (4) фоточувствительных элементов 84а, расположенных в C5a-R3a, C6a-R3a, C5a-R4a и C6a-R4a детекторной матрицы 84а, будет создавать сигнал более низкого уровня (интенсивности). Таким образом, перед тем как сигнал, сформированный фоточувствительным элементом 84а, находящимся в C5a-R3a, выбирается для постоянного хранения в ячейке 131, расположенной в C5-R3 таблице RIX-элементов 130, он сравнивается с сигналами интенсивности, созданными каждым из четырех фоточувствительных элементов 84b массива 82b, которые частично наложены на элемент C5a-R3a, т.е. фоточувствительными элементами 84b массива 82b, которые находятся в C4b-R2b, C5b-2b, C4b-R3b и C5b-R3b. Из Фиг.6 можно видеть, что в этом примере сигналом интенсивности, который предполагается записать на постоянной основе в ячейку 131, расположенную в C5-R3 таблице 130 RIX-элементов, будет сигнал наивысшего уровня (интенсивности), поступающий из этих пяти фоточувствительных элементов (т.е. C5a-R3a, C4b-R2b, C5b-2b, C4b-R3b и C5b-R3b). На Фиг.6 также можно увидеть, что сигнал интенсивности I, который будет выбран для записи в этой ячейке 131, находящейся в C5-R3 таблице RIX-элементов, будет представлять собой сигнал, созданный не соответствующим фоточувствительным элементом 84b, находящимся в C5a-R3a детекторной матрицы 82а, а сигнал более высокого уровня (интенсивности), сформированный фоточувствительным элементом 84b, находящимся в C5b-R3b детекторной матрицы 82Ь. Причина того, что каждый из выбранных при таком сравнении сигналов интенсивности, такой как в приведенном выше примере сигнал, сформированный фоточувствительным элементом 84b, находящимся в C5b-R3b, только лишь предполагается записать на постоянной основе вместо автоматической записи, состоит в том, что только сигналы, соответствующие интенсивности, которая равна или превышает предварительно заданный пороговый уровень, выбираются для записи на постоянной основе при описании формы. Интенсивности, которые меньше порогового уровня, не характеризуют каких-либо существенных форм, содержащихся в изображении 12’, и поэтому не записываются, что более подробно рассмотрено ниже. В описанном выше примере, показанном на Фиг.6, сигнал интенсивности, поступающий от фоточувствительного элемента 84b, находящегося в C5b-R3b, наиболее вероятно, будет превышать такой порог и будет записан как интенсивность I в ячейку 131, расположенную в С5-R3 таблицу RIX-элементов 130 (соответствующую фоточувствительному элементу 84а, расположенному в C5a-R3a, C6a-R3a, C5a-R4a и C6a-R4a детекторной матрицы 82а), в качестве постоянной записи, описывающей формы изображения 12.
В примере, показанном на Фиг.6, каждый из оставшихся трех фоточувствительных элементов 84а матрицы 82а, в которые поступает световое излучение из пятна или зоны 63 (т.е. те, которые расположены в C6a-R3a, C5a-R4a и C6a-R4a), будет сравниваться с соответствующими фоточувствительными элементами 84b матрицы 82b, которые частично наложены на эти фоточувствительные элементы 84а. Таким образом, сигнал, поступающий из элемента 84а, расположенного в C6a-R3a, будет сравниваться с соответствующими выходными сигналами частично наложенных элементов 84b, расположенных в C5b-R2b, C6b-R2b, C5b-R3b и C6b-R3b; сигнал, поступающий из элемента 84а, расположенного в C5a-R4a, будет сравниваться с соответствующими выходными сигналами частично наложенных элементов 84b, расположенных в C4b-R3b, C5b-R3b, C4b-R4b и C5b-R4b, и сигнал, поступающий из элемента 84а, расположенного в C6a-R4a, будет сравниваться с соответствующими выходными сигналами частично наложенных элементов 84b, расположенных в C5b-R3b, C6b-R3b, C5b-R4b и C6b-R4b. При всех таких сравнениях, выполненных для примера, показанного на Фиг.6, сигнал интенсивности, созданный фоточувствительным элементом 84b, расположенным в C5b-R3b, будет наивысшим. Поэтому этот сигнал высокого уровня (интенсивности) будет использоваться для позиций 131 в базе 130 таблицы RIX-элементов, соответствующих не только фоточувствительному элементу 84а, расположенному в C5a-R3a детекторной матрицы 82а, как описано выше, но также и фоточувствительным элементам 84а, расположенным в C6a-R3a, C5a-R4a и C6a-R4a детекторной матрицы 82а.
С другой стороны, сравнение сигнала интенсивности, поступающего из фоточувствительного элемента 84а, расположенного в C7a-R5a детекторной матрицы 82а на Фиг.6, с сигналами от четырех (4) частично наложенных фоточувствительных элементов 84Ь, расположенных C6b-R4b, С7b-R4b, C6b-R5b или C7b-R5b, не обнаружит сигнала более высокого уровня от любого из этих четырех (4) фоточувствительных элементов 84b. Следовательно, сигнал интенсивности, поступающий от фоточувствительного элемента 84а, расположенного в C7a-R5a, будет единственным сигналом, предназначенным для записи в ячейку 131, расположенную в С7-R5 базы 130 таблицы RIX-элементов, но не сигналы от любого из четырех (4) частично наложенных элементов 84b. Если этот выбранный сигнал интенсивности равен или больше порогового уровня, то он будет представлять собой интенсивность I, записанную в данную ячейку 131, расположенную в C7-R5 в RIX-массиве 130.
Таким образом, как можно видеть из приведенного выше описания, для измерения и записи описывающих форму данных, характеризующих излучение высокой интенсивности, может применяться небольшая матрица (например, 16×16), при этом используются две наложенных детекторных матрицы 82а, 82b, соответствующие фоточувствительные элементы 84а, 84b которых имеют разное положение относительно фильтрованного спектра 60. Такое размещение делает возможным безошибочное обнаружение пятен или зон 63 светового излучения высокой эффективности путем фиксирования излучения таких пятен или зон 63, пересекающих границы 92, 94, 96, 98 одного или более фоточувствительных элементов, расположенных в одной детекторной матрице 82а, одним или более частично наложенными фоточувствительными элементами 84b, расположенными в другой детекторной матрице 82b. Применение такого принципа смещения, частичного наложения двух детекторных матриц 82а, 82b делает возможным очень быстрое обнаружение светового излучения 62 высокой интенсивности, сконцентрированного в пятна или зоны 63 в отдельных местах фильтрованного спектра 60, даже в случае, когда фоточувствительные элементы 84а, 84b по площади больше, чем размеры пятна или зоны 63. Недостатки такого размещения включают невозможность различить очень близко расположенные пятна или зоны высокой интенсивности, невозможность определить точную форму таких пятен или зон 63 с высоким уровнем излучения, а также включают запись значений высокой интенсивности для таких пятен или зон в несколько ячеек 131 таблицы RIX-элементов 130, представляющих большие площади фильтрованного спектра 60, чем эти пятна или зоны 63 в действительности занимают, для случаев, когда они пересекают границы между фоточувствительными элементами 84а. Однако такие недостатки не являются существенными для данного варианта применения. Важно зафиксировать такие концентрации или распределения светового излучения, описывающего форму, и записать их вместе с информацией о местоположении таким образом, чтобы обеспечивались логичность, воспроизводимость и возможности анализа, при этом точная корреляция таких зон высокой интенсивности с реальной площадью, которую они занимают в фильтрованном спектре, является не столь важной.
В действительности настоящее изобретение можно использовать всего лишь с одной детекторной матрицей 82а, особенно в предпочтительном варианте реализации изобретения, показанном на Фиг.1, в котором спектр 32 преобразования Фурье фильтруется через щель 52, осуществляющую дифракцию фильтрованного излучения. Такая дифракция приводит к дисперсии светового излучения, а не к концентрации его в пятнах. Тем не менее, значительно большая точность достигается при использовании двух смещенных и наложенных детекторных матриц 82а, 82b с незначительной дополнительной обработкой, выполняемой для сравнения и выбора интенсивности I, как описано выше. В этом смысле еще большая точность может быть достигнута при применении более чем двух смещенных и наложенных детекторных матриц, например трех или четырех, особенно в случае использования еще меньших матриц, например матриц 8×8.
Выбор сигналов наивысшего уровня во время сравнения сигналов от частично наложенных фоточувствительных элементов 84а, 84b, как описано выше, может быть осуществлен несколькими способами, которые вполне очевидны специалистам в данной области техники, например путем пропускания сигналов, поступающих от каждого фоточувствительного элемента 84а, 84b, через сеть блоков сравнения напряжения или при помощи процессов сравнения и выбора, реализованных программно. Следовательно, подобные детали не являются необходимыми для описания или понимания данного изобретения. Однако для облегчения объяснения того, как выходные сигналы интенсивности используются в настоящем изобретении для описания изображения 12, 14,..., n по совокупности форм, обратимся к Фиг.1, на которой повторно в качестве примера, но не подразумевая под этим ограничение, показаны две детекторных матрицы 82а, 82b размером 16×16, предназначенные для измерения светового излучения при 11,25-градусных угловых приращениях 51 поворота щели 52. Как кратко упомянуто выше, компьютер 100 накапливает и упорядочивает сигналы интенсивности (I), которые характеризуют совокупность форм, содержащихся в изображении 12, при конкретных угловых приращениях 51 поворота (R) щели 52 по мере вращения ротора 54 вокруг его оси 57. Информация о повороте R и связанной с ним интенсивности I сводится вместе в таблице 130 RIX-элементов, что более подробно рассмотрено ниже. Для пересылки сигналов между компьютером 100 и устройством 20 обработки изображений используется находящийся между ними информационный канал 132. Например, компьютер 100 может послать сигнал устройству 20 обработки изображений вставить конкретное изображение 12, 14,..., n в оптический описатель 10. Сигналы от устройства 20 обработки изображений могут сообщать компьютеру 100 идентификатор изображения 12 и подтверждать, что оно вставлено. Идентификатором изображения может быть произвольный номер либо любой другой символ или информация, которые могут компьютером 100 быть поставлены в соответствие с таблицами 130 RIX-элементов и с информацией об изображении 12, касающейся, например, того, где его можно найти (URL-адрес, адрес базы данных, каталожный номер в библиотеке, владелец, музейная коллекция или тому подобное). Когда идентификация изображения 12 уже имеется в компьютере 100, по мере вращения ротора 54 кодер 134 определяет угловое положение щели 52 и посылает сигнал по коммуникационному каналу 136 в компьютер 100, этот сигнал несет информацию о конкретном значении R угла поворота щели 52.Кодер 134 может представлять собой, например, устройство, в котором фотоэлемент (не показан) обнаруживает излучение, поступающее от светоизлучающего диода (LED, light-emitting diode) или другого источника излучения (не показаны), которое проходит через отверстия 138 определения положения, расположенные на периферии ротора 54, что очевидно специалистам в данной области техники. Если отверстия 138 определения положения расположены друг от друга на расстоянии, соответствующем 11,25-градусным приращениям 51, то кодер 134 может посылать сигнал по коммуникационной линии 136 в каждый момент времени, когда ротор 54 поворачивается на следующие 11,25 градуса. Компьютер 100 может использовать сигналы, поступающие от кодера 134, для инициирования считывания информации об интенсивности I, поступающей от детекторных матриц 82а, 82b или от отдельного блока 150 обработки сигналов интенсивности, размещенной между детекторными матрицами 82a, 82b и компьютером 100, а также для отслеживания угла поворота R щели 52 для каждого такого считывания интенсивности I. В ином случае может быть использован отдельный блок 140 обработки сигнала поворота R для вычисления значения R угла поворота щели 52 на основе поступающих от кодера 134 сигналов и вывода этой информации о значении R поворота щели 52 вместе с сигналом компьютеру 100 считать интенсивность I каждый раз, когда ротор 54 поворачивается на следующее 11,25-градусное угловое приращение или в принципе каждый раз, когда ротор 54 поворачивается на любое требуемое угловое приращение. Не обязательно, чтобы отверстия 138 определения положения соответствовали требуемым угловым приращениям поворота R, в которых компьютером 100 должна считываться интенсивность I. Либо компьютер 100, либо микропроцессор 140 могут быть запрограммированы таким образом, чтобы отслеживать скорость вращения, т.е. угловую скорость, и значение R поворота при любом расстоянии между отверстиями 138 определения положения и генерировать сигналы чтения интенсивности при любых требуемых угловых приращениях поворота R. Следовательно, в блоке 140 обработки сигнала или в компьютере 100 могут быть обеспечены устройства управления, предназначенные для варьирования значения угловых приращений поворота R щели 52, при которых считываются интенсивности I. Однако было бы удобно и просто разместить отверстия 138 определения положения в соответствии с требуемыми угловыми приращениями поворота R (например, для массового производства описателя 10 изображения) после того, как определено требуемое угловое приращение. Разумеется, чем меньше угловые приращения поворота R, при которых считываются интенсивности I, тем более точными являются данные, но при этом также потребуются большая производительность при обработке данных и большая емкость памяти для хранения. Снова повторимся, что для данного примера выбраны 11,25-градусные приращения поворота R, так как в 180-градусном повороте щели 52 содержится точно 16 приращений по 11,25 градуса. Таким образом, для каждого изображения 12 будут получены шестнадцать (16) таблиц 130 RIX-элементов для записи поворота R и интенсивностей I. Как упомянуто выше, для каждого изображения необходимы только 180 градусов поворота щели 52, так как два половинных фрагмента щели 52 вместе охватывают 360 градусов фильтрованного спектра 60 по мере того как ротор 54 поворачивается на 180 градусов. Разумеется, существует множество других известных специалистам в данной области техники способов отслеживания угла поворота ротора, которые бы могли быть использованы для реализации настоящего изобретения.
Как описано выше, фильтрованный луч 61, прошедший через щель 52 в фильтре 50 пространственных частот, проецируется на смещенные друг относительно друга детекторные матрицы 82а, 82b, в которых фиксируются распределения 62 светового излучения в режиме реального времени при помощи соответствующих отдельных фоточувствительных элементов 84а, 84b. Как также рассмотрено выше, интенсивность I для каждого RIX-элемента таблицы 130 при каждом приращении R угла поворота будет выбираться на основе сигнала наивысшего уровня (интенсивности), поступающего от соответствующего фоточувствительного элемента 84а детекторной матрицы 82а или от одного из четырех фоточувствительных элементов 84b детекторной матрицы 82b, которые частично наложены на этот соответствующий фоточувствительный элемент 84а.
Как кратко упомянуто выше, выбор интенсивности I, поступающей либо от фоточувствительного элемента 84а, либо от одного из четырех частично наложенных фоточувствительных элементов 84b, может быть осуществлен с использованием программного обеспечения, имеющегося в компьютере 100, но предпочтительно выполняется с использованием отдельного блока 150 обработки сигналов интенсивности I, размещенной между детекторными матрицами 82а, 82b и компьютером 100. Как также кратко упомянуто выше, блок 150 обработки сигналов интенсивности I изображения может быть при помощи фиксированной разводки соединен с матрицей блоков 152 сравнения напряжения, пример которой схематично изображен на Фиг.8, или с микропроцессором (не показан), что хорошо известно специалистам в данной области техники. Как показано на Фиг.8, интенсивность I, ассоциированная с примерным фоточувствительным элементом 84а, которая подается в компьютер 100 для ввода в соответствующую ячейку 131 RIX-элемента RIX-таблицы 130, представляет собой сигнал наивысшего уровня (интенсивности), сформированный конкретным фоточувствительным элементом 84а или любым из четырех частично наложенных фоточувствительных элементов 84b. В схеме на Фиг.5 в качестве примера использован тот же самый фоточувствительный элемент 84а, который был рассмотрен ранее, т.е. расположенный в столбце 7а, строке 5а (C7a-R5a) детекторной матрицы 82а (Фиг.5, 6 и 7). Как рассмотрено выше, перед использованием сигнала интенсивности, сформированного фоточувствительным элементом 84а (который обычно представляет собой уровень напряжения) для ввода в таблицу 130 RIX-элементов он сравнивается с сигналами четырех фоточувствительных элементов 84b детекторной матрицы 82b, которые частично наложены на C7a-R5a элемент 84а детекторной матрицы 82а. Как рассмотрено выше, эти четыре частично наложенных элемента 84b расположены в C6b-R4b, C7b-R4b, C6b-R5b и C7b-R5b детекторной матрицы 82b. Как показано на Фиг.8, выходные напряжения двух элементов 84b, расположенных в C6b-R4b и C7b-R4b, сравниваются блоком 152 сравнения, которая выводит наивысшее из этих двух напряжений, а выходные напряжения двух других элементов 84b, расположенных в C6b-R5b и C7b-R5b, сравниваются блоком 154 сравнения, которая выводит наивысшее из этих двух напряжений. Соответствующие выходные напряжения схем 152, 154 сравнения затем сравниваются блоком 156 сравнения, которая выводит наивысшее напряжение, сформированное четырьмя отдельными элементами 84b. Это наивысшее напряжение от элементов 84b затем сравнивается блоком 158 сравнения с выходным напряжением, сформированным элементом 84а (C7a-R5a). Наивысшее из напряжений, создаваемых одним фоточувствительным элементом 84а, расположенным в C7a-R5a, и объединенной в кластер группой частично наложенных фоточувствительных элементов 84b, расположенных в C6b-R4b, C7b-R4b, C6b-R5b и C7b-R5b, будет напряжением, которое подается в блоки 160 усилителя и аналого-цифрового преобразователя (АЦП) для обработки и посылки как интенсивность I через коммуникационный канал 162 в компьютер 100. Разумеется, в блоке 150 обработки сигналов содержатся и другие компоненты обработки и подготовки сигналов, что хорошо известно специалистам в данной области техники и не выходит за пределы их компетенции, поэтому эти компоненты нет необходимости рассматривать подробно в целях описания и понимания настоящего изобретения. Существуют также и другие последовательности размещения схем сравнения, которые дают те же результаты. Также должно возникнуть понимание того, что интенсивность I, ассоциированная с одним фоточувствительным элементом 84а, расположенным в C7a-R5a детекторной матрицы 82а, и определенная описанным выше образом, является единственной из интенсивностей I, поступающих из детекторной матрицы 82а размером 16×16, которая обрабатывается блоком 150 обработки сигналов, как описано выше, и посылается в компьютер 100 по коммуникационному каналу 162 в режиме реального времени.
Если продолжить рассмотрение данного изобретения со ссылкой, в первую очередь, на Фиг.8 и, во вторую очередь, на Фиг.7, то, когда в компьютер 100 поступает сигнал из кодера 134 и/или блока 140 обработки сигнала поворота R о достижении щелью 52 требуемого углового приращения поворота R, компьютер 100 считывает 256 интенсивностей I из блока 150 обработки сигналов, которые ассоциированы со всеми из 256 фоточувствительных элементов 84а детекторной матрицы 82а размером 16×16, и посылает их в соответствующие ячейки или приемники 131 таблицы 130 RIX-элементов. Например, интенсивность I, ассоциированная с фоточувствительным элементом 84а, изображенным на Фиг.8, т.е. расположенным в C7a-R5a детекторной матрицы 82а, отбирается компьютером 100 для размещения вместе с соответствующим углом поворота R в расположенной в столбце 1, строке 5 ячейке 131 RIX-элемента RIX-таблицы 130 размером 16×16. Подобным же образом оставшиеся из 256 интенсивностей I, ассоциированные с оставшимися из 256 фоточувствительных элементов 84а детекторной матрицы 82а размером 16×16 (подразумевается, что они не ниже порогового уровня, рассмотренного выше), отбираются компьютером 100 и посылаются вместе с поворотом R, относящимся к этим интенсивностям I, в соответствующие позиции или приемники 131 RIX-массива 130. Следовательно, для каждого выбранного приращения угла поворота R щели 52 существует 256 интенсивностей I, которые вместе с этим конкретным углом поворота R отбираются в таблицу 130 RIX-элементов. Снова повторимся, что при использовании 11,25-градусных приращений поворота R имеется шестнадцать (16) RIX-таблиц 130 для каждого изображения 12, и в каждой из шестнадцати (16) RIX-таблиц 130 содержится одно значение R поворота с 256 возможными интенсивностями I, ассоциированными с 256 фоточувствительными элементами 84а детекторной матрицы 82а.
Однако, как кратко упомянуто выше, чтобы избежать хранения и обработки ненужных данных, компьютер 100 сохраняет в RIX-таблице 130 только интенсивности I, достигающие определенного порогового уровня. Например, если обратиться к Фиг.5 и 7, в детекторной матрице 82а существуют фоточувствительные элементы 84а, в которые поступает небольшое количество светового излучения или оно не поступает вовсе, такие как элементы в строках 0а, 1а, 14а и 15а, которые расположены вне фильтрованного спектра 60. Кроме того, возможно, что в некоторые фоточувствительные элементы 84а, расположенные между полосами светового излучения 62, такие как элементы в C9a-R9a и C10a-R8a, не поступает световое излучение 62, существенное с точки зрения описания совокупности форм изображения 12. Поэтому нет необходимости сохранять такие интенсивности I или их отсутствие в RIX-таблицах 130. Следовательно, для интенсивностей I, ассоциированных с фоточувствительными элементами 84а детекторной матрицы 82а, значения которых ниже определенного порогового уровня интенсивности, в соответствующие позиции или приемники 131 RIX-элементов RIX-таблицы 130 не вводятся данные по R, I или X. Для интенсивностей I, превышающих упомянутый порог, в соответствии с предпочтительным вариантом реализации настоящего изобретения имеется четыре (4) уровня категоризации, т.е. 0, 1, 2 или 3. Таким образом, для записи каждой интенсивности I в RIX-таблицу 130 необходимы только два (2) бита, т.е. 00, 01, 10 или 11. Разумеется, использование большего или меньшего, чем четыре, числа уровней интенсивности I, несомненно, не выходит за пределы настоящего изобретения. Однако большее число уровней интенсивности I потребует большего числа бит. Например, восемь (8) уровней интенсивности I потребует три (3) бита для записи, а шестнадцать (16) уровней интенсивности I потребуют четыре (4) бита.
Поле данных "X" в каждом RIX-элементе используется для коэффициента нелинейного искажения с целью содействия в поиске и нахождении изображений с почти, но не в точности совпадающими характеристиками формы или помощи в нахождении изображений, которые имеют одинаковые характеристики форм, но могут быть слегка смещены в поле зрения, что более подробно описано ниже. Однако поле данных "X" может также представлять собой флаг, используемый для некоторых других целей при поиске в базе данных или используемый для более высокой точности определения поворота R или интенсивности I. В предпочтительном, но не обязательном варианте реализации настоящего изобретения "X" может принимать до четырех (4) значений - 0, 1, 2, 3, поэтому он может сохраняться с использованием двух (2) бит информации.
В предпочтительном варианте реализации настоящего изобретения поле R в RIX-элементе содержит четыре (4) бита для кодирования поворота R, что достаточно для 16 приращений поворота R по 11,25 градуса каждое при 180 градусах поворота. Два (2) бита используются для кодирования интенсивности I, как рассмотрено выше, и два (2) бита используются для кодирования коэффициента нелинейного искажения Х или другого флага, как также рассмотрено выше. Следовательно, каждый RIX-элемент содержит только восемь (8) бит, т.е. один (1) байт информации. Если продолжать далее, то в каждой RIX-таблице 130 содержатся 256 RIX-элементов, т.е. 256 возможных байт информации, и существует одна (1) RIX-таблица 130 для каждого из шестнадцати (16) 11,25-градусных приращений поворота R для каждого изображения 12. Следовательно, согласно предпочтительному, но не обязательному варианту реализации настоящего изобретения для описания одного изображения 12 по совокупности форм требуется максимум 4096 байт, когда используются детекторные матрицы 82а, 82b размером 16×16, 11,25-градусные приращения поворота R щели 52 и RIX-таблицы 130 размером 16×16.
Как кратко упомянуто выше, поле "X" в RIX-элементе предпочтительно используется как коэффициент нелинейного искажения, который может быть присвоен RIX-таблицы RIX-массива 130, которые в противном случае не используются или не заполняются из-за интенсивности I ниже порогового уровня, чтобы обеспечить несколько различных уровней анализа нелинейного искажения в анализируемых данных. Таким образом, если выполняющий поиск человек имеет изображение, для которого он хочет найти совпадение, но при поиске в базе данных не может найти совпадающее изображение в RIX-информации, хранящейся для изображений 12, 14,..., n в этой базе данных, при использовании точной RIX-информации, то этот человек может расширить поиск для просмотра неточных совпадений путем задания отличающегося значения Х в RIX-элементах.
Для иллюстрации этой отличительной особенности обратимся, в первую очередь, к Фиг.9а и 9b и, во вторую очередь, к Фиг.7 и 8. На Фиг.9а изображена часть RIX-таблицы 130, содержащая, для начала, столбцы 0-8 и строки 9-15 с примерными значениями R, I и Х в нескольких позициях или ячейках RIX-элементов RIX-таблицы 130. В этом примере некоторые позиции или ячейки RIX-элементов в таблице 130 являются пустыми, так как интенсивности I, ассоциированные с соответствующими фоточувствительными элементами 84а детекторной матрицы 82а, ниже минимального порогового уровня. Другими словами, в эти соответствующие фоточувствительные элементы 84а или любые из частично наложенных фоточувствительных элементов 84b детекторной матрицы 82b поступает небольшое количество светового излучения или его не поступает вовсе. Поэтому компьютер 100 первоначально не производит ввода RIX-данных в эти ячейки или позиции таблицы 130, оставляя все столбцы 0, 1, 2, 8 в строках 9, 10, 11, 12, 13, 14, 15; столбец 3 строк 9, 10, 11, 14, 15; столбец 4 строк 9, 10, 13, 14, 15; столбец 5 строк 9, 12, 13, 14, 15; столбец 6 строк 11, 12, 13, 14, 15 и столбец 7 строк 10, 11, 12, 13, 14, 15 пустыми. Теперь, если рассматривать более подробно те примерные ячейки или позиции RIX-элементов в RIX-таблице 130, для которых интенсивности I достаточно высоки, чтобы быть записанными, т.е. по меньшей мере равны пороговому уровню, то в каждую такую ячейку RIX-элемента введены значения R, I и X. В данном примере во всех заполненных ячейках R=4, так как интенсивности I для этой примерной RIX-таблицы 130 получены из полос 62 светового излучения в одном фильтрованном спектре 60, когда щель 52 находится под одним из дискретных углов R поворота, например в 45-градусном угловом положении, как показано на Фиг.7. Как рассмотрено выше, 45-градусное угловое положение - это четыре (4) 11,25-градусных угловых приращения от вертикального начального положения. Таким образом, R равняется 4 для каждого значения интенсивности I при этом 45-градусном положении щели 52, поэтому R=4 вводится в каждую ячейку 131 RIX-элемента, для которой существует записываемая интенсивность I. Когда щель 52 поворачивается на следующее 11,25-градусное приращение до 56,25 градуса, новая RIX-таблица 130 будет заполняться новыми значениями интенсивности I. Однако для примера на Фиг.9а положение щели 52 составляет 45 градусов, поэтому R=4 для каждого RIX-элемента, для которого интенсивность I является достаточно высокой, чтобы быть записанной.
Уровни I записанной интенсивности для примера на Фиг.9а и 9b произвольно показаны как меняющиеся от 1=0 до 1=3, т.е. в четырех (4) различных категориях интенсивности I. Все коэффициенты нелинейного искажения Х приведены как имеющие уровень наивысшей точности, т.е. Х=3, так как эти заполненные RIX-элементы базируются на точных интенсивностях I, полученных в фоточувствительных элементах 84а или 84b детекторных матриц 82а, 82b, как рассмотрено выше. Поэтому Х=3 указывает наивысший уровень точности, т.е. наименьшее нелинейное искажение.
Для понимания поставленной задачи рассмотрим, например, оригинальное изображение 12, описываемое с точки зрения совокупности форм согласно данному изобретению, как описано выше, и дополнительно - RIX-данные для такой совокупности форм, сохраняемые в RIX-таблице 130 по Фиг.9а. RIX-таблица 130 для поворота R=4 на Фиг.9а сохраняется в базе данных вместе с другими RIX-таблицами для поворотов R=1-3 и 5-16 для изображения 12, а также с уникальным идентификационным номером изображения (ID#), который может быть связан с адресом того источника, где изображение 12 может быть найдено. Учтем также, что пользователь имеет копию изображения 12, но хочет узнать, где находится оригинал. Однако копия содержит изображение, слегка смещенное вверх или вниз, либо вправо или влево в поле зрения. Тем не менее пользователь помещает копию изображения в описатель 10 оптического изображения, соответствующий настоящему изобретению, и получает RIX-данные, которые описывают совокупность форм копии. При смещении изображения копии в поле зрения RIX-информация для описанной совокупности форм копии должна быть той же самой или почти той же самой, что и RIX-информация для описанной совокупности форм оригинального изображения 12. Однако такое смещение изображения копии в поле зрения приводит к заполнению других ячеек 131 RIX-элементов RIX-таблицы 130 для данной копии, т.е., возможно, смещенных на одну или несколько ячеек RIX-элементов влево, вправо, вверх или вниз относительно RIX-элементов оригинального изображения 12, показанных на Фиг.9а. Таким образом, когда RIX-данные для совокупности форм копии (т.е. эталонного изображения) используются для поиска в базе данных на предмет точного совпадения с RIX-информацией, хранящейся в базе данных для оригинального изображения 12, т.е. поиск при уровне нелинейного искажения Х=3, то RIX-данные оригинального изображения 12 на Фиг.9а, будучи расположенными в слегка отличающихся столбцах и строках RIX-таблицы 130 по сравнению с соответствующей RIX-информацией копии изображения, могут не быть идентифицированы как совпадения при поиске.
Для решения указанной задачи, когда RIX-данные для оригинального изображения 12 загружены в RIX-таблицы 130, компьютер 100 может быть запрограммирован, чтобы также заполнять некоторые из ранее не заполненных ячеек 131 RIX-элементов в RIX-таблицах 130 теми же значениями поворота R и интенсивности I, что показаны на Фиг.9а, но с меньшими значениями X, т.е. большим нелинейным искажением. Обратимся, например, к Фиг.9b, где первоначально заполненные ячейки 131 RIX-элементов, то есть содержащие значения Х=3, выделены более жирными линиями, чтобы наглядно показать, где эти первоначально заполненные ячейки RIX-элементов расположены. Затем, как показано на Фиг.9b, компьютер 100 заполняет RIX-значениями R, I, X некоторые из ранее пустых ячеек 131 RIX-элементов в количестве трех ячеек 131 по горизонтали и трех ячеек 131 по вертикали в направлении от ближайших первоначально заполненных ячеек 131.
Если говорить более конкретно, как показано на Фиг.9b, в каждой вновь заполненной ячейке 131 RIX-элемента по-прежнему хранится тот же поворот R=4, в результате чего поиск новой RIX-информации по-прежнему производится при RIX-значениях для этого углового положения щели 52, т.е. для положения 45 градусов. Однако каждой дополнительной ячейке 131 RIX-элемента, отстоящей в вертикальном или горизонтальном направлении от первоначально заполненной ячейки 131, присваивается значение Х на шаг ниже, т.е. увеличивая нелинейное искажение по мере удаления ячейки 131 RIX-элемента от первоначально заполненной ячейки 131 RIX-элемента. Таким образом, если первоначально заполненные ячейки 131 RIX-элементов содержат значения нелинейного искажения Х=3, то вновь заполненные RIX-элементы, соседние по отношению к первоначально заполненной ячейке 131 RIX-элемента, содержат Х=2. Удаленные от первоначально заполненной ячейки 131 на одну ячейку 131 содержат Х=1, и удаленные на две ячейки 131 содержат Х=0. Значения интенсивности I, введенные в новые ячейки 131 RIX-элементов, содержащие отличающиеся значения нелинейного искажения Х=2, 1 или 0, в общем случае те же самые, что и расположенные в непосредственной близости первоначальные значения интенсивности I, хотя конкретные алгоритмы присвоения значений I при заполнении новых ячеек 131 RIX-элементов могут меняться. Смысл заключается в том, чтобы обеспечить возможности поиска и нахождения идентичных или почти идентичных распределений интенсивности I, содержащихся в RIX-элементах, для конкретного поворота R, даже если RIX-элементы, хранящие эти значения интенсивности I, расположены в RIX-таблице 130 с небольшим смещением. Таким образом, пользователь из приведенного выше примера, возможно, не нашедший совпадения для копии изображения при поиске более точных RIX-данных (т.е. RIX-элементов, в которых Х=3), может затем задать менее точный поиск. При таком менее точном поиске могут искаться совпадения при тех же значениях R и I, но при другом X, т.е. при значениях нелинейного искажения, например, с Х=2 или Х=1, или Х=0. Совпадение RIX-информации может быть найдено при описании совокупности геометрических форм копии с использованием Х=2 или Х=1, или Х=0, при том, что при использовании более точного Х=3 совпадений найдено не было, в результате пользователю по-прежнему предоставляется возможность доступа к информации об идентификации и местонахождении оригинального изображения 12.
Даже если полученная в результате сканирования копия оригинального изображения 12 не имеет смещения в поле зрения, вероятно, было бы нереальным ожидать, что все RIX-элементы оригинального изображения 12, хранящиеся в базе данных, могут совпасть. Поэтому выполняющему поиск человеку программой поиска может быть предоставлена возможность задать требуемые уровни совпадения RIX-элементов. Например, пользователь может искать совпадение, скажем, 70 процентов RIX-элементов и получить идентификационную информацию для всех оригинальных изображений 12, 14,..., n, для которых при поиске совпали 70 процентов RIX-элементов. Если поиск возвращает слишком много совпадений при уровне 70 процентов, то пользователь может осуществить другой поиск, задавая более высокий (или более точный) уровень совпадений, например, сообщив только идентификационную информацию изображений, для которых совпадают, скажем, 80 или 90 процентов RIX-элементов.
RIX-информация для изображения 12 может быть распределена компьютером 100 с созданием реляционной базы 102 данных по геометрии, имеющей любую из множества конфигураций и содержащей множество другой информации по любым направлениям, как показано на Фиг.1, в зависимости от того, какие критерии могут потребоваться пользователям для сохранения, поиска и извлечения информации об изображениях 12, 14,..., n. Например, одна таблица 104 базы данных может содержать RIX-данные, относящиеся к конкретному идентификатору изображения (например, к ID# изображения) вместе с информацией о местонахождении изображения (такой как URL-адрес изображения 12 в сети Интернет), информацией о формате и разрешении (такой как приращения поворота, размеры детекторных матриц и т.п.), информацией о цвете (которая может вводиться вручную или при помощи автоматического оптического описателя цвета (не является частью настоящего изобретения)), информацией о текстуре (которая также может быть получена из другого автоматизированного оптического описателя текстуры (например, заявка на патент США №09/326362)) и т.п. Другая таблица 106 может содержать идентификационные номера или обозначения всех изображений 12, 14,... n при помощи RIX-описаний совокупности геометрических форм.
Предыдущее описание рассматривается только как иллюстрирующее принципы данного изобретения. Более того, так как специалистам в данной области техники вполне очевидны многочисленные модификации и изменения, желательно не ограничивать данное изобретение точными устройством и способом, показанными и описанными выше. Соответственно, возможны все подходящие модификации и эквиваленты, которые не выходят за пределы объема данного изобретения, определенные пунктами приведенной ниже Формулы изобретения. Использование в этом описании слов "содержат", "содержит", "содержащий", "включают", "включает" и "включающий" направлено на указание наличия приведенных особенностей, функционально обособленных частей, компонентов или этапов, но при этом не исключается наличие или добавление одной или более других особенностей, функционально обособленных частей, компонентов, этапов или их групп.

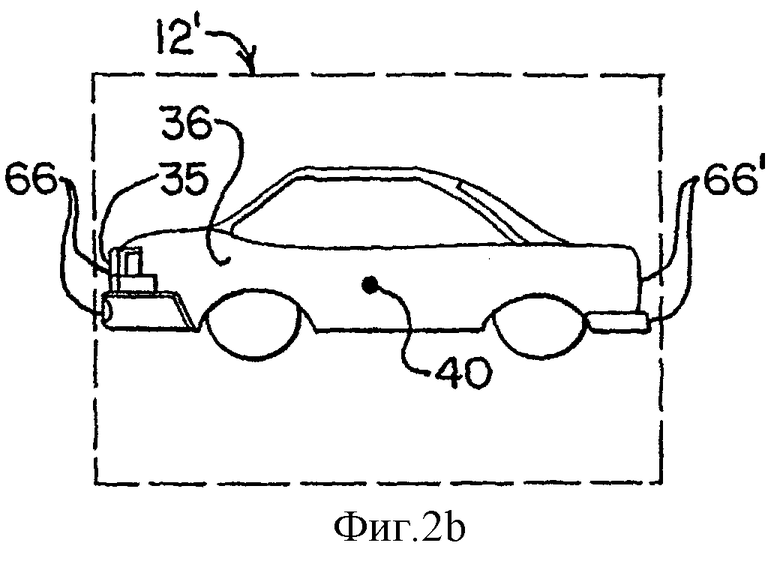
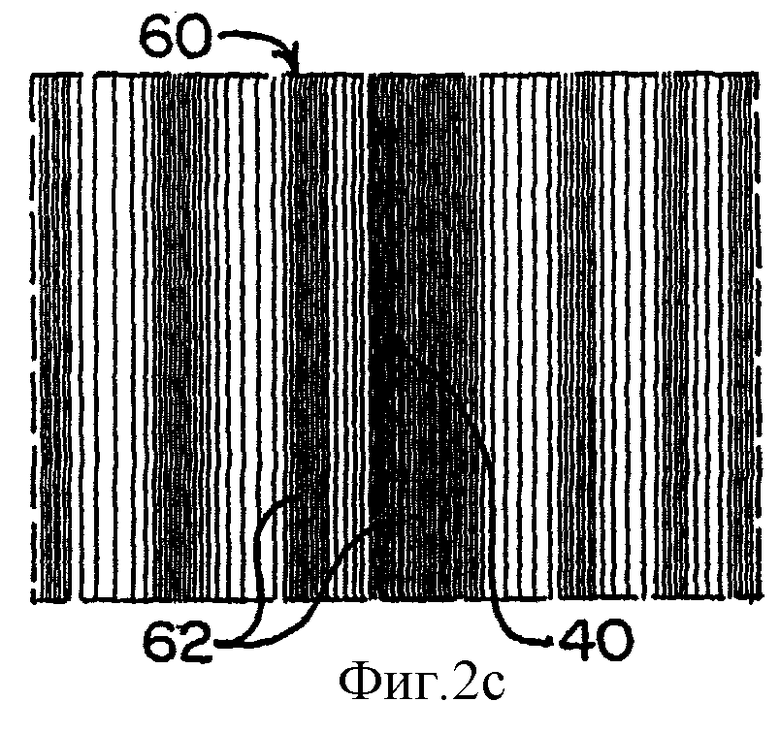

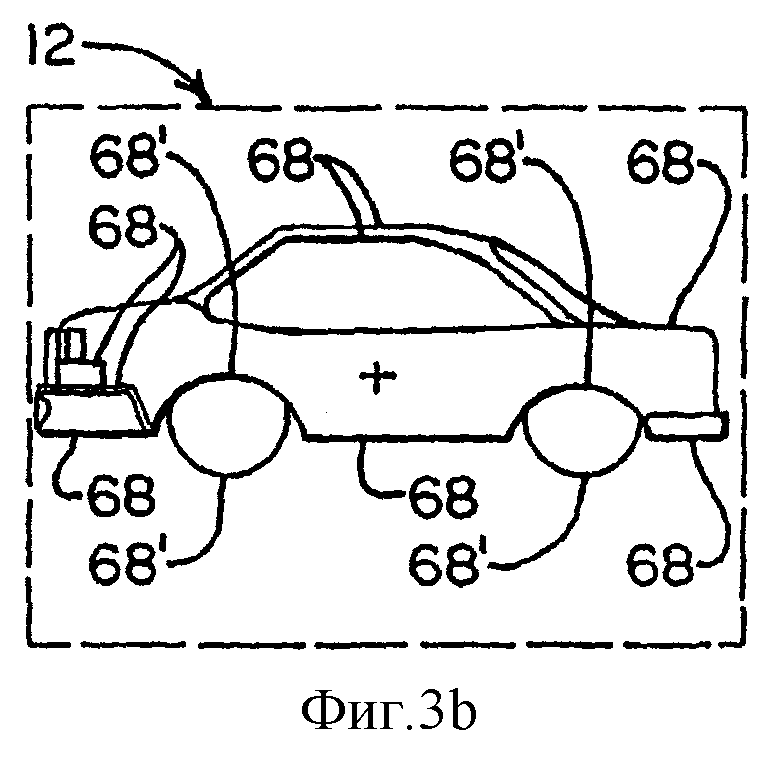


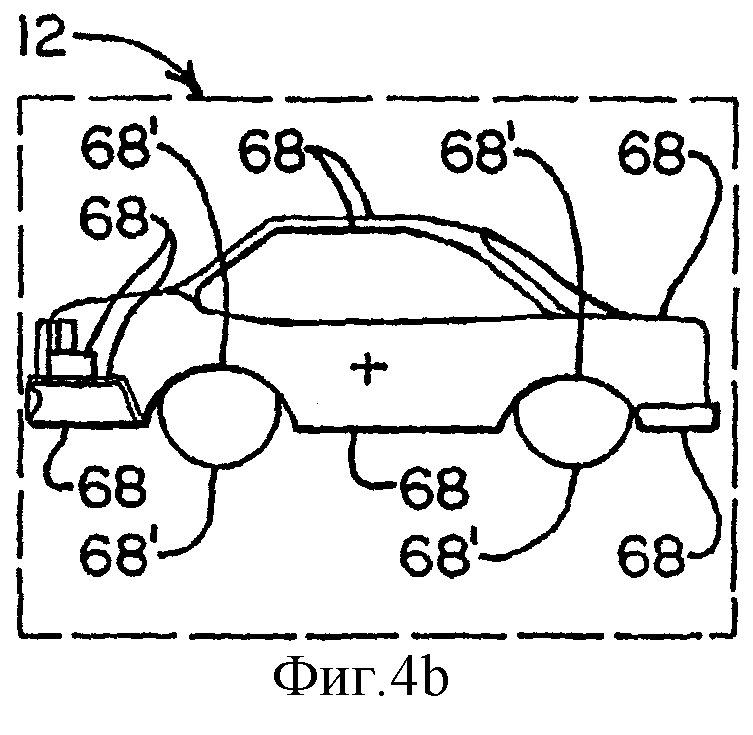


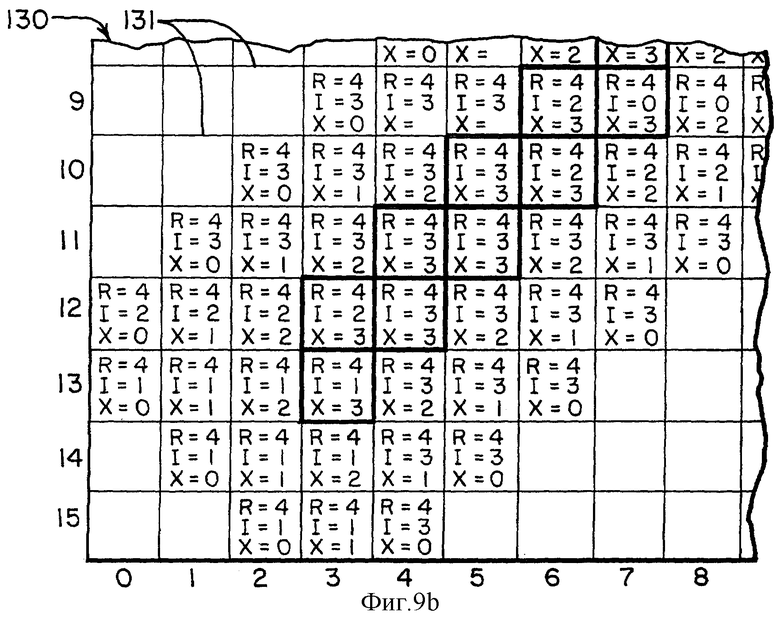
Изобретение относится к области распознавания и сравнения изображений. Его применение позволяет получить технический результат в виде обеспечение быстрого и нетребовательного к системным ресурсам распознавания и сравнения изображений. Этот результат достигается благодаря тому что блок описания оптического изображения измеряет световое излучение при дискретных угловых положениях щели, имеющейся во вращающемся фильтре пространственных частот, установленном в фокальной плоскости линзы Фурье, в плоскости которой формируется спектр преобразования Фурье для пространственных частот изображения. Измерение светового излучения при помощи небольшой фотодетекторной матрицы облегчается путем расщепления луча, содержащего фильтрованный спектр светового излучения, и проецирования расщепленного луча на две фотодетекторных матрицы, смещенных друг относительно друга и наложенных друг на друга. 5 н. и 38 з.п. ф-лы, 9 ил.

| US 3771124, 06.11.1973 | |||
| Способ определения координат объекта в поле зрения и устройство для его осуществления | 1989 |
|
SU1721616A1 |
| Способ оптической обработки изображений и устройство для его осуществления | 1990 |
|
SU1811628A3 |
| US 3891968 A, 24.06.1975 | |||
| US 5815598 A, 29.09.1998. | |||

