Изобретение относится к обработке оптических изображений и прикладному телевидению и может быть использовано для создания систем технического зрения (СТЗ) роботизированных комплексов, работающих в оптическом диапазоне длин волн.
Целью изобретения является повышение точности способа.
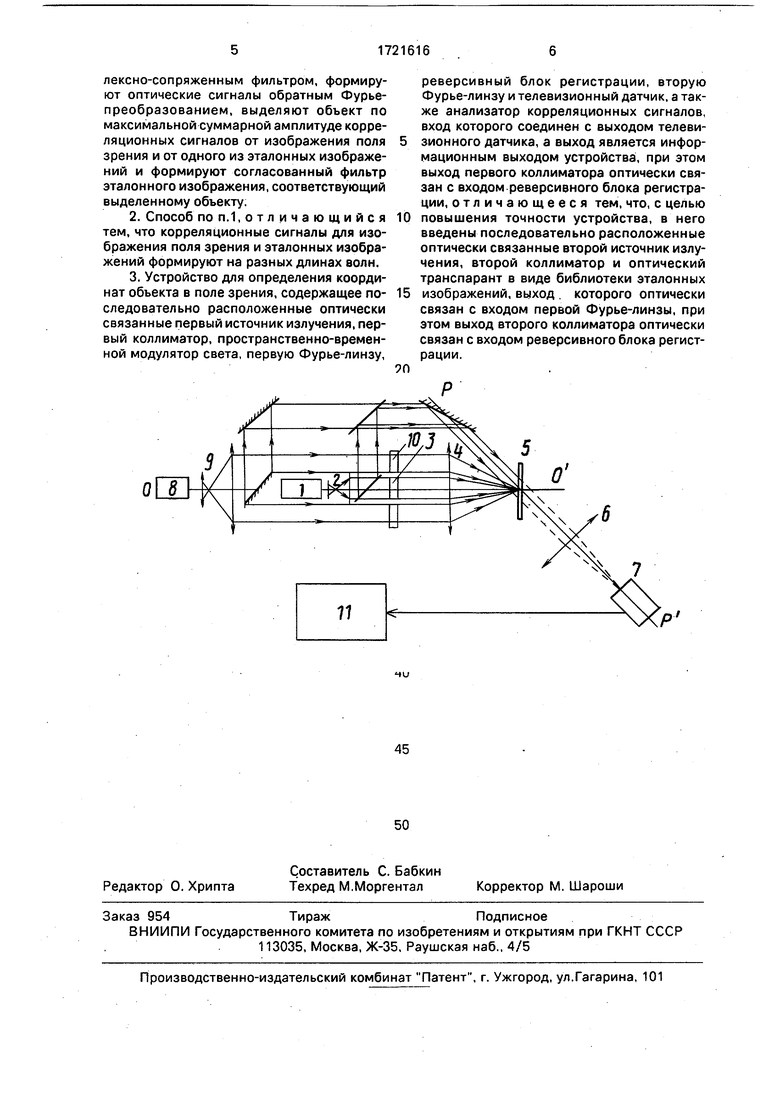
На чертеже представлена оптическая схема устройства, реализующего способ определения координат.
Устройство содержит первый источник 1 когерентного излучения, коллиматор 2, формирующий плоский фронт когерентного излучения, пространственно-временной
модулятор 3 света, осуществляющий модуляцию излучения изображениями поля зрения, Фурье-линзу 4, осуществляющую прямое преобразование Фурье, реверсивный блок 5 регистрации, Фурье-линзу 6, осуществляющую обратное преобразование Фурье, телевизионный датчик 7, второй источник 8 когерентного излучения, второй коллиматор 9, формирующий плоский фронт излучения, транспарант 10, содержащий эталонные изображения, анализатор 11 корреляционных сигналов. Второй источник излучения установлен соосно с первым. Транспарант 10 установлен соосно с модулятором 3 света и характеризуется кольце ч4 Ю
CN С
вым расположением эталонных изображений. Модулированные фронты излучений источников 1 и 8 распространяются соосно и пространственно разделены, а апертура Фурье-линзы не ограничивает апертуры фронтов излучений. Длины волн излучений источников 1 и 8 в общем случае не совпадают.
Устройство, реализующее способ определения координат, работает следующим образом.
Коллиматор 2 формирует плоский фронт излучения источника 1. Излучение делится амплитудно на предметный и опорный пучки. Предметный модулируется модулятором 3 исходным изображением поля зрения и из данного пучка формируется Фурье-линзой 4 спектр, который интерферирует с опорным пучком. Результат интерференции регистрируется блоком 5 регистрации, образуя со- гласованный фильтр. Одновременно формируется плоский фронт дополнительного излучения коллиматором 9, из которого пространственным делением (центральная часть) формируются дополни- тельный опорный и предметный кольцевой пучки. Предметный пучок модулируется транспарантом 10, Фурье-преобразующей линзой 4 формируется Фурье-спектр эталонов, который пространственно совмещает- ся с зарегистрированным фильтром,
На модуляторе 3 формируется последующий кадр изображения поля зрения системы, им модулируется основной предметный пучок и формируется Фурье-спектр линзой 4, который пространственно совмещается с зарегистрированным блоком 5 фильтром. Таким образом осуществляется корреляционное сравнение двух спектров с фильтром, результатом которого является формиро- вание двух корреляционных сигналов - основного, с максимальной амплитудой, опознавания всего поля зрения, и дополнительного, с меньшей амплитудой, опознавания одним эталоном объекта .в исходном поле зрения системы. При равенстве длин волн источников направления распространения основного и дополнительного корреляционных сигналов совпадают, так как восстанавливается основной опорный пу- чок. При разных длинах волн угол распространения пучков корреляционных сигналов определяется их разностью и положением опознающего эталона в пространстве по отношению к оптической оси.
Поел е выполнения обратного Фурье-преобразования Фурье-линзой 6 в ее фокальной плоскости формируются корреляционные сигналы, считываемые телевизионным датчиком 7. Анализатор 11
сигналов корреляционной плоскости определяет наличие сигналов корреляции по трем последовательно применяемым признакам: поиск сигналов с максимальной амплитудой; поиск слабого сигнала в области, радиус которой определен разностью длин волн основного и дополнительного источников; определение координаты сигнала с максимальной амплитудой на данном радиусе. Определение полярной координаты дополнительного сигнала однозначно определяет опознающий эталон, так как оптические оси основного и дополнительного пучков совпадают и основной корреляционный сигнал находится на этой оси. После выделения опознающего эталона выделяется часть дополнительного пучка, его содержащая, стирается существующий на реверсивной среде фильтр, формируется Фурье-спектр эталона линзой 4, который интерферирует с ранее сформированным дополнительным опорным пучком и результат интерференции вновь регистрируется. Полученный фильтр пространственно совмещается с существующим спектром последующего кадра поля зрения системы. Результат корреляционного сравнения Фурье преобразуется линзой 6 и корреляционный сигнал считывается датчиком 7, а анализатор 11 определяет координаты объекта в поле зрения СТЗ во втором кадре.
Предлагаемый способ и устройство для его реализации позволяют повысить достоверность получаемых результатов (точность определения координат) за счет увеличения отношения сигнал/помеха в корреляционной плоскости. Использование пространственно-временного разнесения сигналов корреляции также повышает достоверность определяемых координат.
Формула-изобретения 1. Способ определения координат объекта в поле зрения, заключающийся в Фурье-преобразовании оптического сигнала объекта в поле зрения, модуляции преобразованного сигнала согласованным фильтром эталонного изображения, обратном Фурье-преобразовании промодулирован- ного сигнала и определение координат объекта по положению максимума корреляционного сигнала, отличающийся тем, что, с целью повышения точности способа, предварительно формируют комплексно- сопряженный фильтр изображения поля зрения, формируют оптические сигналы объекта в поле зрения и эталонных изображений объектов, формируют спектры оптических сигналов их Фурье-преобразованием, модулируют спектральные составляющие оптических сигналов комплексно-сопряженным фильтром, формируют оптические сигналы обратным Фурье- преобразованием, выделяют объект по максимальной суммарной амплитуде корреляционных сигналов от изображения поля зрения и от одного из эталонных изображений и формируют согласованный фильтр эталонного изображения, соответствующий выделенному объекту.
2.Способ по п.1,отличающийся тем, что корреляционные сигналы для изображения поля зрения и эталонных изображений формируют на разных длинах волн.
3.Устройство для определения координат объекта в поле зрения, содержащее последовательно расположенные оптически связанные первый источник излучения, первый коллиматор, пространственно-временной модулятор света, первую Фурье-линзу,
0
5
П
реверсивный блок регистрации, вторую Фурье-линзу и телевизионный датчик, а также анализатор корреляционных сигналов, вход которого соединен с выходом телевизионного датчика, а выход является информационным выходом устройства, при этом выход первого коллиматора оптически связан с входом реверсивного блока регистрации, отличающееся тем, что, с целью повышения точности устройства, в него введены последовательно расположенные оптически связанные второй источник излучения, второй коллиматор и оптический транспарант в виде библиотеки эталонных изображений, выход . которого оптически связан с входом первой Фурье-линзы, при этом выход второго коллиматора оптически связан с входом реверсивного блока регистрации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения наличия вершины взаимодействия заряженных частиц и ее координат в объеме трекового детектора | 1986 |
|
SU1388819A1 |
| ОПТИЧЕСКИЙ КОРРЕЛЯТОР | 2002 |
|
RU2212054C1 |
| ДИНАМИЧЕСКИЙ ОПТИЧЕСКИЙ КОРРЕЛЯТОР | 1991 |
|
RU2022326C1 |
| Устройство корреляционного зрения робота | 1990 |
|
SU1770120A1 |
| Способ автоматической сортировки продукции по морфологическим признакам | 1979 |
|
SU971520A1 |
| Устройство для центрирования изображений | 1976 |
|
SU669182A2 |
| Устройство для многоканальной обработки двумерных сигналов | 1972 |
|
SU529734A1 |
| Способ определения пространственного смещения распознаваемого изображения и устройство для его осуществления | 1987 |
|
SU1597887A1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ПО ЧАСТОТЕ | 2015 |
|
RU2583128C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЦЕЛЕЙ НА ОСНОВЕ РЕГИСТРАЦИИ И ОБРАБОТКИ ХОДА ЛУЧЕЙ ОТ ОБЪЕКТОВ В НАБЛЮДАЕМОМ ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2760845C1 |
Изобретение относится к обработке оптических изображений и прикладному телевидению и может быть использовано для создания систем технического зрения роботизированных комплексов. Цель изобретения - повышение точности способа определения координат объекта в поле зрения. Предлагаемый способ основан на реализации последовательности действий при корреляционном сравнении эталонных изображений с изображением поля зрения и отличается регистрацией комплексно-сопряженного фильтра изображения поля зрения и одновременным сравнением с ним следующего кадра поля зрения системы и эталонных изображений объектов корреляционными методами, причем сравнение может осуществляеться на различных длинах волн. Устройство для реализации способа состоит из первого источника излучения, первого коллиматора, пространственного модулятора света, первой Фурье-линзы, реверсивного блока регистрации, второй Фурье-линзы, телевизионного датчика, второго источника излучения, второго коллиматора, транспаранта, содержащего эталонные изображения, и анализатора корреляционных сигналов. 2 с. и 1 з.п.ф-лы, 1 ил. со С
А
/гтпЗё
г
| Василенко Г.И., Цибулькин Л.М | |||
| Голо- графические распознающие устройства | |||
| - М.: Радио и связь, 1985, с.291-300. |
