Изобретение относится к области механики и посвящено исследованию перехода гравитационной энергии массы тела в механическую энергию поступательного движения.
Считается общепринятым, что многие энергии при определенных условиях переходят в другие виды энергии, но среди энергий в литературе не упоминается переход гравитационной энергии в механическую энергию поступательного движения (Р.И.Грабовский, 1980; Я.И.Перельман, 1994).
Непризнание современной наукой возможности преобразования гравитационной энергии в механическую энергию поступательного движения опровергается естественной природой. Она свидетельствует о несостоятельности взглядов ученых и писателей по этой проблеме. Известно, что определяющими факторами в эволюции животного мира являются энергии света и силы земного притяжения, которые используются организмом, преобразуясь в структуры тела и в том числе в органы движения. Об этом свидетельствует и закон М.В. Ломоносова (1748) о сохранении материи и движения. В конечностях, на основе законов физики, сформировались структуры, осуществляющие преобразование энергии массы тела животного в механическую энергию поступательного самодвижения. Сами конечности стали выполнять роль не только органов передвижения, но и роль “механических” систем, обеспечивающих ритмическое, периодическое с каждым шагом поднятие центра тяжести животного. В этом и заключается сущность повторных “возможно до бесконечности” использований преобразуемых сил гравитации в моторику движения животных.
Ритмичность, повторяемость различных биологических процессов, связанных с переходом (преобразованием) электрической, химической и световой энергий гелий-неонового лазера в другие виды энергий, была показана в наших многочисленных исследованиях, выполненных новейшими методами фото-электроники, электронно-микроскопии, биофизическими и гистохимическими методами исследования (Н.В.Михайлов, 1985, А.Н.Михайлов, 1973 и др.)
Все эти данные, вместе взятые, привели нас к мысли о том, что гравитационная энергия массы тела животного с помощью известных физике законов, технических устройств и описанных нами “систем простых машин” в конечностях животных (систем винта, ворота, блоков, наклонных плоскостей, параллелограмма равнодействующих сил) преобразуется в механическую энергию движения, обеспечивающую вместе с силой мышечного сокращения преодоление силы тяжести животного при его поступательном движении.
А.О.Марей (1875) утверждал, что механические явления у животных решаются с удивительной простотой и легкостью. “Человек должен был построить множество механических машин, прежде чем понял принцип, которым управляется полезная работа в машинах и организме человека”. Системы простых машин животных, по мнению Губо и Баррие (1901), умеряют тяжесть тела. Грудина Я.И. (1911) считала, что для животных справедливы все законы механики. В.О.Ковалевский (1949) указал на редукцию пальцев и удлинение конечностей лошади в филогенезе как следствие выработки больших усилий и скорости ее движения. В авиации вредные колебания крыла самолетов в полете были устранены после того, как были обнаружены противофляторные устройства на крыльях стрекоз. Все это свидетельствует о том, что в организме животных содержится музей-банк данных о полезных машинах - преобразователей энергии, которые целесообразно переносить на технические модели.
В целом вопрос о преобразовании гравитационной энергии в механическую энергию бесконечного поступательного движения остается открытым.
Сущность изобретения состоит в том, что впервые доказано существование в природе и возможность технического воспроизведения-перехода гравитационной энергии тела в механическую энергию поступательного движения.
УРОВЕНЬ ТЕХНИКИ
Аналогом нашего изобретения, его прототипом, являются системы простых машин у животных (Н.В.Михайлов, 1961, 1987). В тазовых конечностях лошади и других животных нами обнаружены почти все системы простых машин, известных физике и технике: система винта, ворота, блока, наклонных плоскостей, параллелограмма равнодействующих сил, полиспаса.
Биомеханический анализ суставных поверхностей костей, точек приложения сил мышц, связок, костей и их взаимодействие в различные фазы движения конечностей показывает, что в заплюсневом и коленном суставах лошади сосредоточены биомеханические комплексы, благодаря которым происходит превращение силы тяжести - массы животного в механическую энергию поступательного движения. При этом в стадии опоры через поперечные связки сухожилий мышц и других образований происходит объединение усилий как разгибателей, так и сгибателей на разгибание всех суставов конечности лошади одномоментно, ибо работа их автоматизирована. В период выноса конечностей через фасциальные узлы фасций бедра и голени передают свое натяжение к сухожилию длинного разгибателя пальца. Таким путем, масса тела используется для ускорения и облегчения выноса конечности. В коленном суставе благодаря скошенности гребней блоков коленной чашки и бедренной кости, с одной стороны, и сухожилия подколенного мускула, с другой, осуществляется торможение сгибания коленного сустава под тяжестью тела. Такой механизм аналогичен тормозным колодкам колес железнодорожных вагонов. Наши данные подтверждают мнение биологов о том, что в заплюсне лошади локализован “источник движения”. П.Ф.Лесгафт (1939) утверждал, что движение в этом суставе совершается с большой силой. Губо и Боррие (1901) характеризовали заплюсну как одно из энергетических орудий по выработке импульса движения.
Они изумлялись, как сравнительно слабые мускулы голени могут побеждать сопротивление более чем в 100 кг. С установлением в заплюсне и коленном суставе систем "простых машин" становится понятен источник их движущей силы.
Источником движущей силы в суставах, по нашему заключению, является гравитационная энергия массы тела животного, преобразованная в "системах простых машин" в механическую энергию, которая совместно с энергией мышц осуществляет при каждом толчке конечностей лошади поднятие центра тяжести животного от почвы. В результате, с каждым шагом животного вновь и вновь увеличиваются размеры гравитационного поля, уменьшаемого каждый раз при опоре конечности о почву за счет сгибания суставов. Таким образом создаются условия для бесконечного повторного использования преобразованной энергии гравитационного поля для осуществления работы - поступательного движения животного с минимальной тратой энергии мышц. Проведенный в соответствии с законами физики анализ биофизических структур суставов показал, что заплюсневый и коленный суставы функционируют.
“Системы винта”. Винтовой блок таранной (заплюсневой большеберцовой) кости лошади. Его два гребня и желоб между ними представляют сектор винта, а соответствующая ему поверхность дистального конца большеберцовой кости - сектор "гайки" с двумя винтообразными желобами и гребнем посередине. Такая винтовая поверхность костей является видовой особенностью лошадей, к которым в процессе эволюции и доместикации предъявлялись требования в выработке силы, скорости движения с наименьшей затратой, при этом мышечной энергии. В биологической и ветеринарной анатомической литературе говорится о скошенном винтообразном блоке костей как органе, обеспечивающем лишь прочность соединения костей и отведения конечностей в сторону. Между тем угол наклона гребней костей у шаговых и рысистых лошадей различен. В каждом случае размер шага винта блоковых гребней находятся в соответствии с требованием силы или скорости движения животного.
При движении животного в заплюсне действующим началом служат мышцы заднебедренной группы, которые отводят проксимальный конец голени назад. При опоре большеберцовая кость заводится на более высокий медиальный блоковый гребень таранной кости. Преодолеваемой силой служит давление голени. Действие этого механизма, дающего выигрыш в силе, проявляется при разгибании загруженной конечности. Выигрыш в силе будет во столько раз больше (согласно закону равенства работ), во сколько длина окружности, описанной точкой приложения силы, больше шага винта.
“Система ворота”. Трехглавый мускул голени, оканчиваясь на пяточной кости, которая у лошади плотно сочленяется с таранной костью, образует вместе с другими костями заплюсны биомеханическую систему, напоминающую “ворот”. В этой системе пяточная кость является рычагом, а блок таранной кости - валом. Трехглавый мускул голени, действуя на пяточную кость при полусогнутом состоянии опирающейся конечности, как бы ввинчивает блок таранной кости в желоба большеберцовой кости и переводит ее на проксимальные дуги гребней блока. В результате такого движения голень приподнимается не только вследствие разгибания угла сустава, но и благодаря передвижению большеберцовой кости по гребням блока вверх. Блок таранной кости, таким образом, одновременно является и “винтом”, и “валом”, а пяточная кость - рычагом. Действующей силой служит трехглавый мускул голени, а преодолеваемой - давление голени. Указанные силы дают вращательные моменты противоположного направления. Подобное соотношение сил соответствует “системе ворота”. Эффект действия механизма проявляется в момент толчка конечности от почвы.
"Система ворота" заплюсны лошади так же, как и "система винта", дает выигрыш в силе, экономя, точнее усиливая, работу мышц, затрачиваемую на разгибание загруженной конечности.
"Система подвижного блока". Сухожилие глубокого сгибателя пальца, огибая держатель таранной кости, который выполняет роль блока, является точкой приложения действующей силы в момент опоры конечности о почву, оно противодействует тяжести тела. При отталкивании конечности оно толкает конечность вперед, разгибая заплюсневый сустав.
Эта система сил аналогична системе механизма подвижного блока, если рассматривать действие сухожилия глубокого пальцевого сгибателя в совокупности с суставами пальца как путовый сустав, в котором точкой приложения силы сухожилия мускула будет межсесамовидная связка. Эта система во многом напоминает механизм полиспаса, так как в отмеченных точках опоры проходят оси вращения суставов. Для перемещения заплюсневого и путового суставов из заднего положения, в котором они находятся при опоре конечности, в переднее, то есть для разгибания суставов, необходимо равенство моментов сил движущей и силы сопротивления относительно точек опоры как в заплюсневом, так и в путовом суставах. Движущей силой является сокращение мускула, а силой сопротивления - давление тяжести тела, передаваемое через большеберцовую кость в системе подвижного блока и третьей плюсневой кости - в системе полиспаса.
Следовательно, движущая сила перемещает точку своего приложения на расстояние вдвое больше, чем путь точки - место приложения сопротивления. В нашем примере глубокий сгибатель пальца должен укоротить свою длину в два раза больше по сравнению с расстоянием, на которое перемещается заплюсна.
“Параллелограмм” или “механизм тетивы”. В этой механической системе сила тяжести тела преобразуется в силу натяжения тетивы лука, представленной осухожиленной мышцей поверхностного сгибателя пальца, который при сгибании заплюсневого сустава оттягивается пяточной костью назад. Отрезки сухожилия мышцы, расположенные проксимально и дистально от точки приложения силы тяжести - пяточной кости, действуют на эту точку под углом друг к другу, что соответствует условиям параллелограмма сил. Назначение этой мышца заключается в противодействии, точнее в преобразовании силы гравитации, за счет эластического сопротивления сухожилия мускула при опоре и отбрасывания заплюсневого сустава вперед при толчке конечности от почвы.
Известие, что равнодействующая двух сил, действующих под углом на одну точку, изображается по величине и направлению диагональю параллелограмма сил, естественно, это сложение сил по закону параллелограмма не есть простое арифметическое сложение.
В этой системе параллелограмма одновременно с поверхностным сгибателем пальца участвует длинный разгибатель пальца. Его сухожилие в области заплюсны прижимается к ней тремя поперечными фасциальными связками, которые создают для него точку приложения силы, вызванной натяжением его сухожилия при сгибании коленного сустава. Таким образом, так называемый разгибатель в фазе выноса и в фазу опоры конечности также выполняет роль разгибателя за счет его механического натяжения. Этим примером показано, как одна и так же мышца при изменении биомеханических условий открытой или закрытой кинематической цепи участвует в разгибании суставов как в фазу выноса, так и опоры как за счет сокращения мышечных волокон, так и за счет механического натяжения ее сухожилия, вызванного действием массы тела животного.
“Тормозной механизм” коленного сустава лошади. Изучение биомеханических принципов построения коленного сустава лошади показало, что этот сустав в период опоры конечностей выполняет роль тормозного механизма, аналогичного тормозным плашкам колес железнодорожных вагонов. Тем самым сустав как бы противодействует, точнее преобразует силу давления - тяжести тела в силу для удержания коленного сустава в полусогнутом состоянии.
В тормозном механизме сустава участвуют: винтообразно скошенные блоки менисков бедренной кости, гребни блока для коленной чашки и сама коленная чаша, двояковогнутые латеральный и медиальный мениски, сухожилия малоберцового и длинного разгибателя пальцев и мощное сухожилие подколенного мускула. Буферная и тормозная роль менисков и других образований сустава в литературе не объяснены.
Обращаясь к механике, мы видим, что исходя из работы силы при подъеме груза по “наклонной плоскости” мыщелки бедра, смещая мениски назад, а не поднимаясь по ним, сами испытывают ответное усилие с их стороны. Сила ответного давления менисков на бедренную кость зависит от высоты их наклонных плоскостей, которые мыщелки бедра должны преодолеть при условии неподвижности менисков, а также связки, удерживающие мениски в неподвижном состоянии.
Из подобия двух равнобедренных треугольников с равными углами при вершине наклонная плоскость дает выигрыш в силе подъема груза во столько раз, во сколько раз длина наклонной плоскости больше ее высоты. На нашем примере сила ответного давления на бедро (тормозной эффект) будет в соответствующее число раз меньше силы давления бедра на мениски.
Строение и расположение подколенного мускула лошади свидетельствует не о его несгибательной функции, как принято считать, а, напротив, активно содействует разгибанию коленного сустава в фазу опоры конечности. Сильно развитое сухожилие мускула, располагаясь внутри сустава, как шкив охватывает задний край подвижного латерального мениска сустава и препятствует его смещению назад при давлении на мениск латерального мыщелка бедренной кости. В этом и заключается его тормозная роль.
С противоположного направления на блоковые гребни бедренной кости оказывает давление скошенный винтообразно в виде клина блок коленной чашки, фиксированный мощным связочным аппаратом, представляющего собой окончание четырехглавого мускула бедра. Блоковидные формы этих костей и движение бедра по винтовой поверхности коленной чашки может быть оценено как движение по наклонной плоскости. Система коленной чашки действует с латеральным мениском по общей окружности, но в противоположном направлении.
Кроме названных “систем простых машин”, в совместной работе грудных и тазовых конечностей функционирует так называемая система “колено”, которая используется в технике как механизм для подъема грузов, требующий минимальной затраты дополнительной силы в начале его работы.
Приведенный биомеханический анализ впервые описанных нами систем простых машин в тазовых конечностях лошади показал, каким образом происходит переход гравитационной энергии массы тела животного в механическую энергию поступательного движения животного. Эта энергия совместно с силой мышечного сокращения, направленная на разгибание суставов, загруженных при опоре конечностей, или содействуя выносу конечностей, осуществляет очень важную роль в поднятии центра тяжести животного при каждом его шаге.
Тем самым создаются условия для повторных использовании гравитационной энергии массы тела животного в его поступательном движении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Как было показано выше, преобразование гравитационной энергии массы тела животного в животном организме осуществляется на основе его взаимодействия с биологическими “системами простых машин”, а бесконечность движения достигалась за счет ритмически повторяемых с каждым шагом животного, включением и выключением из действия этих машин, то есть оно осуществлялось по физическому закону гармонических колебаний, естественно, с некоторым участием мышечной энергии.
В настоящем разделе описываются эксперименты, в которых изучалась возможность моделирования биологических систем простых машин, их совмещение в одном техническом устройстве. Целью исследования являлось техническое воспроизведение процесса преобразования гравитационной энергии тела в механическую энергию поступательного движения без использования дополнительных энергий, и на этой основе осуществление этого устройства стало возможным благодаря взаимствованию из живой природы схем и принципов действия “систем простых машин”, обеспечивающих переход энергии гравитации в механическую энергию поступательного движения.
В предложенном нами устройстве сочетается взаимодействие массы двухконусного тела с тремя системами простых машин: винта, наклонных плоскостей и параллелограмма сил. Благодаря этим системам гравитационная энергии массы тела, т.е. его потенциальная энергия, переходит в кинетическую-механическую энергию вращательного и одновременно поступательного движения. Это явление осуществляется в гравитационном пространстве-поле между центром тяжести тела и его точками опоры, наклонных плоскостей, т.е. Землей.
Согласно законам всемирного тяготения и закону сохранения и превращения энергий материальные точки - тела притягиваются друг к другу силой, пропорциональной их массе и обратно пропорциональной квадрату расстояния между ними.
Взаимодействие между телами осуществляется в гравитационном поле (в поле сил тяготения). При переходе из одного состояния (потенциального в кинетическую) тела совершают работу, как выражение изменения работы. Работа, совершенная телом при переходе одного состояния в другое, равна разности энергий, присущих системе в этих состояниях.
Из физики известно, что расчет работы перемещающегося тела, соответствующей максимальному сближению тел, показывает потенциальную энергию тяготения со знаком минус.
Знак минус обусловлен тем, что по мере самопроизвольного сближения тяготящихся тел их потенциальная энергия должна уменьшиться, переходя в кинетическую. Таким образом, работа перемещения тела между двумя точками гравитационного поля равна разности потенциальных энергий тела в этих точках.
Таким образом, работа в данном случае, равна произведению массы тела на разность потенциалов этих точек, взятых с обратным знаком. Если работа совершается внутренними силами самой системы, то и энергия системы убывает.
Согласно второму закону Ньютона (основного закона динамики поступательного движения) ускорение, приобретенное телом под действием силы, направлено так, как сила, пропорционально силе и обратно пропорционально массе тела.
Из закона действия и противодействия (3-го закона Ньютона) следует, что два взаимодействующих тела действуют друг на друга с силами, равными по значению и противоположными по направлению.
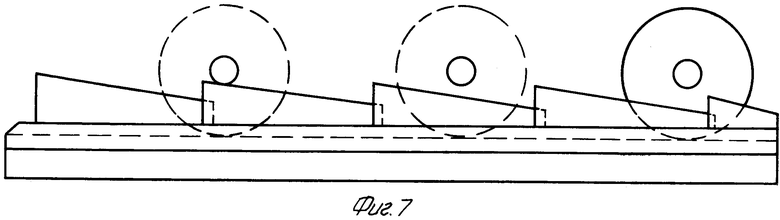
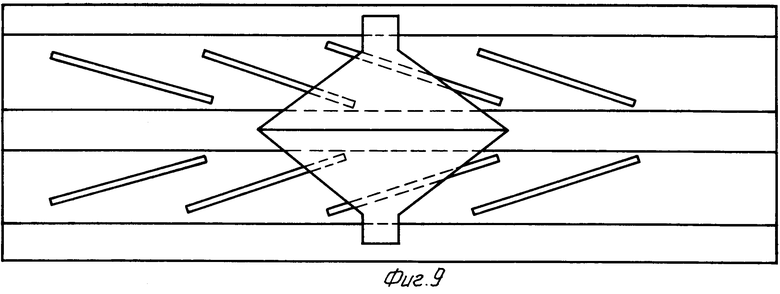
В предложенной нами моделе двухконусное тело осуществляет взаимодействие с тремя наклонными плоскостями. При этом две наклонные плоскости расположены под углом друг к другу, то есть являются расходящимися плоскостями, по которым двухконусное тело и совершает вращательное, переходящее одновременно в поступательное движение (фиг.7, 8, 9) по криволинейной и прямолинейной троекториям.
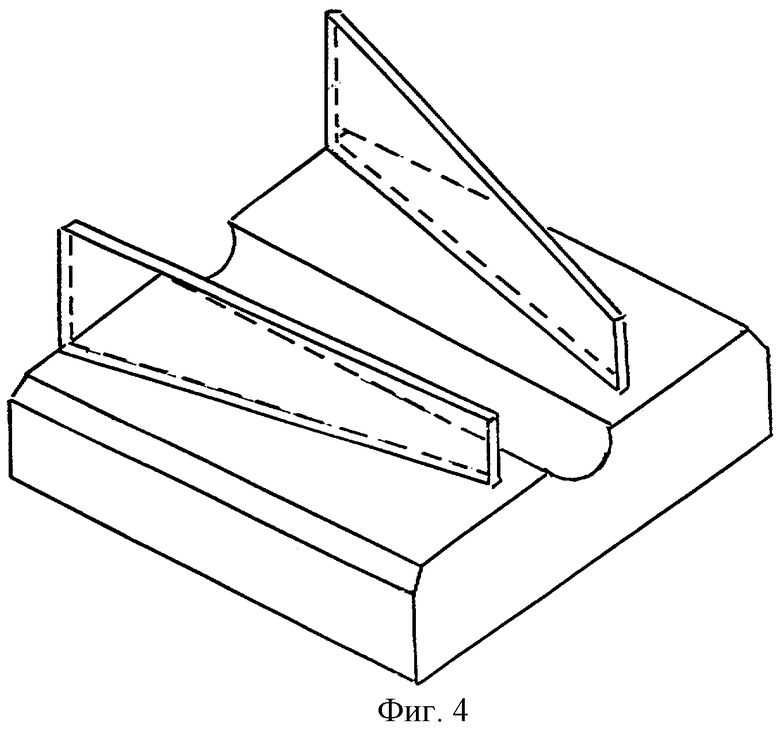
Согласно фиг.4 наклонные плоскости, расположенные под углом друг к другу, могут рассматриваться как противоположные векторы.
Действия над векторами осуществляются согласно правилам векторного исчисления. Сложение векторов производится по правилу параллелограмма.
Векторы можно сложить и другим способом, совмещая начало одного вектора с концом второго, что мы и сделали в нашей моделе (фиг.7, 9). Вектор, соединяющий начало первого вектора с концом второго, также представляет искомую величину. Этот способ, называющийся "правилом треугольника", особенно удобен при сложении нескольких векторов, что также имеет место в нашей моделе.
Система координат многозвеньевых наклонных плоскостей в нашем устройстве, относительно которых рассматривается движение тела, может служить системой координат, связанной с точкой земной поверхности.
Тогда положение тела - точка в любой момент времени определяется координатами, которые обозначают траекторию - путь, описываемый движущейся точкой. Конусообразное тело, двигаясь по наклонным плоскостям, совершает вращательно-винтовое движение, которое одновременно смещается и прямолинейно. Точки опоры конусовидного тела смещаются от основания конусов в начале движения к их вершинам в конце сегмента, описывая спиральный путь. Очевидно, что прямолинейное движение и криволинейный путь совпадают.
Из приведенных примеров видно, что движение тела двойной конусовидной формы по двум расходящимся наклонным плоскостям укладывается в законы элементарной механики.
Что же касается длительного самодвижения тела, то для достижения этой цели мы применили в нашем устройстве физический принцип колебательного движения, который свойственен не только физическим явлениям, но и широко распространен в биологических процессах: биение сердца, дыхание, движение конечностей животных и т.д.
При колебательных движениях происходит многократное возвращение тела к своему первоначальному состоянию. Гармонические колебания сводятся к совокупности простейших периодических колебаний. Гармонические колебания вызываются силой, которая пропорциональна смещению и направлена против смещения.
Гармоническое колебание в нашей моделе достигается за счет повторения энное количество раз процессов, происходящих при движении конусовидного тела по звеньям наклонных плоскостей, в которых гравитационная энергия тела преобразуется во вращательное и поступательное движение одновременно.
Движение тела, будучи ограниченным длиной оси тела и наклонных плоскостей, мы проводили за счет соединения отдельных звеньев устройства в последовательно соединенную цепь. Тем самым мы достигли повторяемости явления движения тела в каждом последующем звене с начальных исходных позиций расположения точек опоры тела в области основания его конусов.
К концу же движения в каждом звене точки его опоры смещаются к вершинам конусов. При этом размер гравитационного поля уменьшается до минимальных размеров и движение тела должно остановиться. Но в этот момент основание конусов вновь становится на наклонные плоскости последующего звена и оно в новом звене продолжает свое движение по восходящим наклонным, расходящимся плоскостям.
ПЕРЕЧЕНЬ ФИГУР ЧЕРТЕЖЕЙ
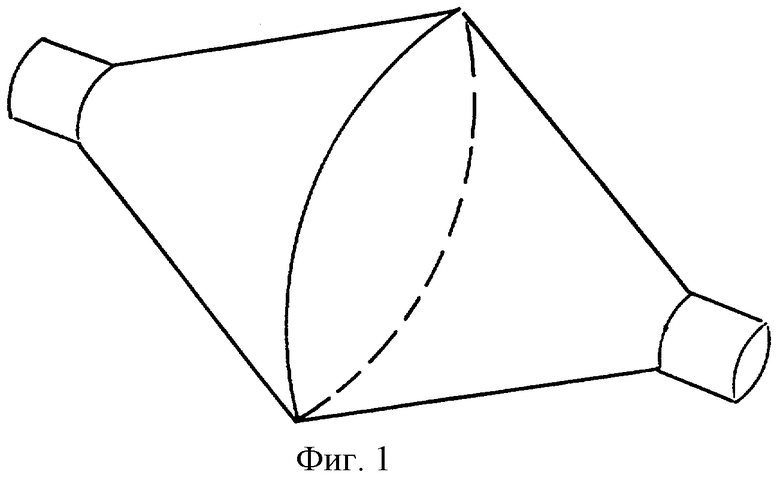
Фиг.1. Двухконусное тело в изометрии.
Фиг.2. Двухконусное тело в поперечном изображении.
Фиг.3. Двухконусное тело в продольном изображении.
Фиг.4. Звено платформы с парными наклонно-расходящимися плоскостями в изометрии.
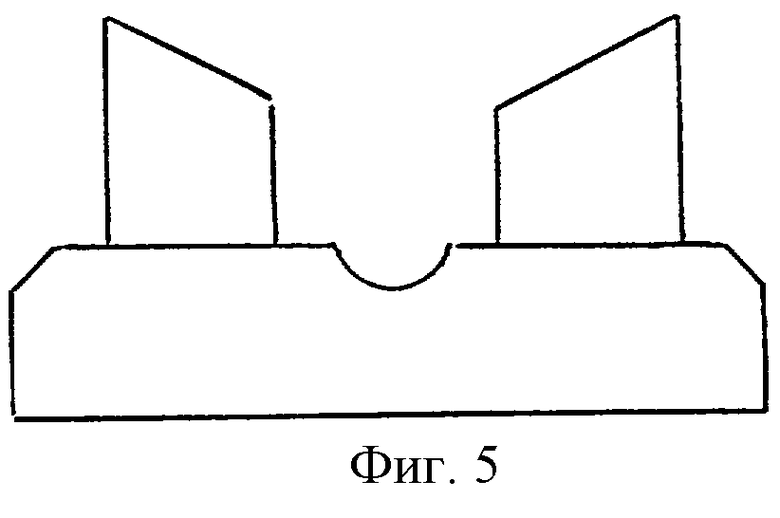
Фиг.5. Звено платформы с наклонно-расходящимися плоскостями в поперечном изображении.
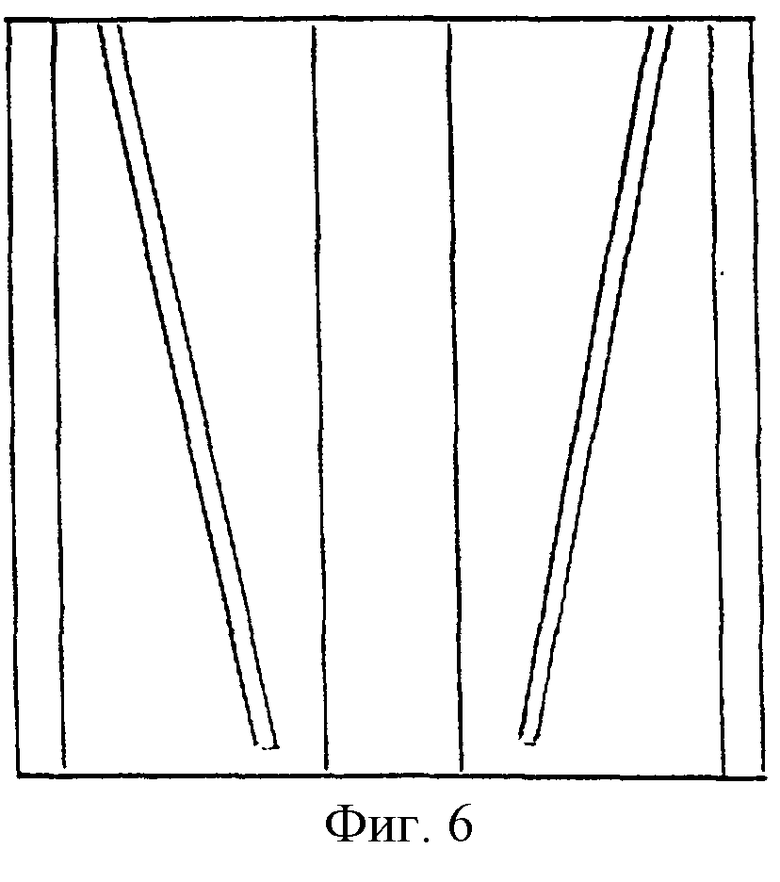
Фиг.6. Звено наклонно-расходящихся плоскостей, вид сверху.
Фиг.7. Многозвеньевая платформа с наклонно-расходящимися плоскостями и с двухконусным телом на них, вид сбоку.
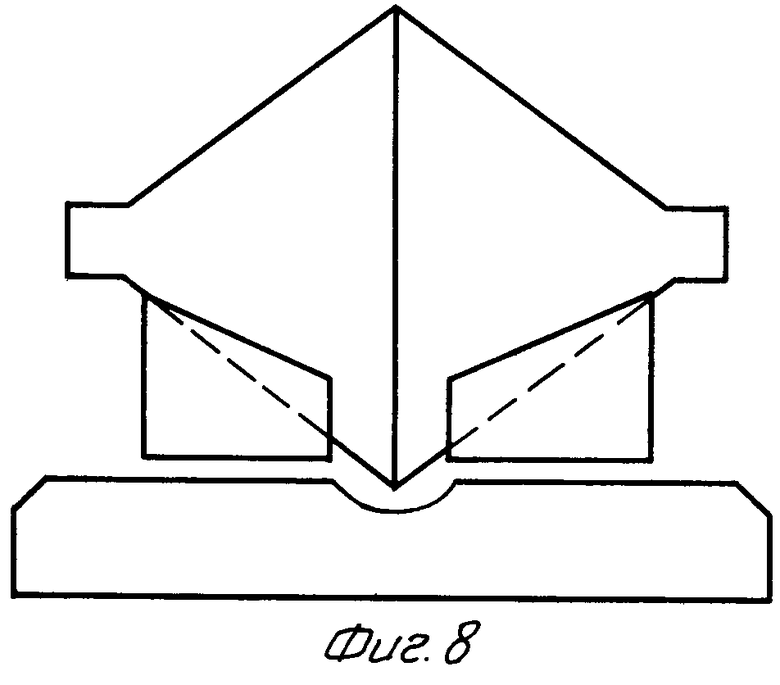
Фиг.8. Двухконусное тело на наклонно-расходящихся плоскостях, в поперечном изображении.
Фиг.9. Двухконусное тело на многозвеньевой платформе.
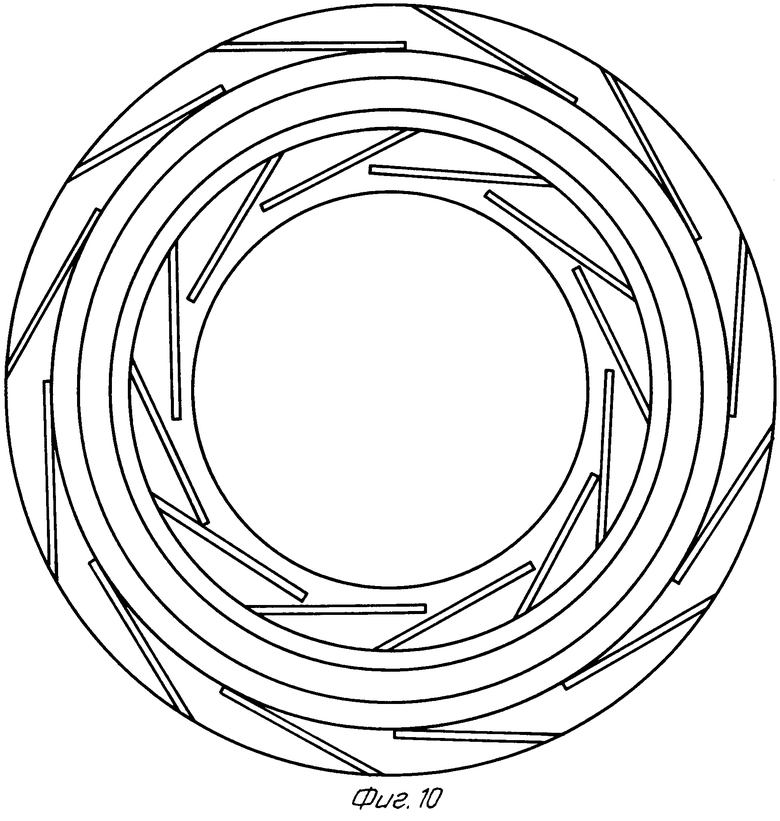
Фиг.10. Звенья наклонно-расходящихся плоскостей на круговой платформе.
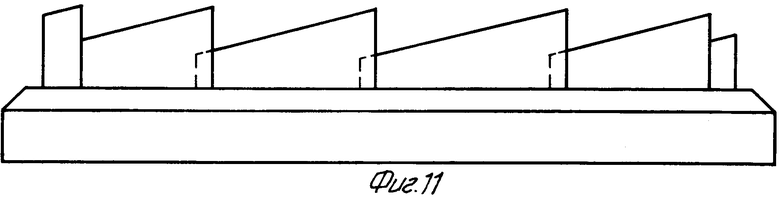
Фиг.11. Боковое изображение звеньев наклонно-расходящихся плоскостей на круговой платформе.
СВЕДЕНИЯ, ПОДТВЕРЖДАЮЩИЕ ВОЗМОЖНОСТЬ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В статическом состоянии конструкция заявленного нами устройства представляет собой композицию фигур: двухконусного тела (фиг.1, 2, 3) с горизонтальной платформой (фиг.4, 5, 6), на которой последовательно соединены одинаковые звенья парных наклонных расходящихся плоскостей (пластин) (фиг.8, 9, 10).
Такая конфигурация устройства по внешнему виду соответствует формам “систем простых машин”: наклонных плоскостей, параллелограмму равнодействующих сил и винта (фиг.1, 4, 1).
В динамическом состоянии устройство начинает функционировать с момента помещения двухконусного тела на начальный участок наклонных плоскостей у угла их расхождения (фиг.6).
С этого момента возникает расхождение (несовпадение) между вертикальными линиями, соединяющими центр тяжести тела с точкой его опоры, с одной стороны, и линией взаимодействия центра тяжести массы тела с массой Земли. При этом тело, помещенное на наклонную плоскость, выходит из состояния относительного покоя, возникает гравитационное поле - пространство и потенциальная гравитационная энергия массы тела переходит в кинетическую-механическую энергию его движения (фиг.7, 8, 9).
Устройство состоит из следующих фигур:
1. Двухконусное тело (фиг.1, 2, 3),
2. Платформа для поступательного прямолинейного движения (фиг.4, 5, 6).
3. Пластинки трапециевидной формы, вмонтированные в платформы, служат опорными плоскостями для движения по ним двухконусного тела.
Парные пластинки вмонтированы в платформы таким образом, что они представляют фигуру наклонных плоскостей с острым углом наклона в 15° и одновременно расходящимися по горизонтали под углом в 30°
Длина пластинок равна 7,5 см, на такую же длину удалены передние концы пластинок одна от другой, тогда как задние концы отстоят один от другого на расстоянии двух сантиметров.
Материал для пластин может состоять из любого твердого материала (металл, стекло, плотное дерево и пр.).
Платформы должны отвечать требованиям: плотности материала, устойчивости и строго горизонтального положения. Пластины должны быть вмонтированы в платформы неподвижно.
Двухконусное тело, в котором конуса соединены основаниями неподвижно, должно быть изготовлено из твердых тяжелых материалов: металл, цемент и др. с гладким покрытием поверхностей конусов. Размеры тела в нашей моделе составляют: высота конусов по 6 см, диаметр основания - 7,5 см, масса тела - 500 г.
Осуществление этих процессов или явлений стало возможным благодаря моделированию органов движения животных и на основе использования законов физики из области механики, в которой описываются системы простых машин, позволяющих получить выигрыш в силе или скорости движения.
В нашем устройстве преобразование гравитационной энергии массы двухконусного тела в механическую энергию поступательного движения осуществляется за счет композиции - сочетания трех систем простых машин: наклонных плоскостей, параллелограмма сил и системы винта, которые взаимодействуют с массой двухконусного тела.
Наше устройство отличается от аналогов из живой природы или тех технических устройств, которые используются в технике, тем, что в нем не затрачивается дополнительная энергия для поднятия центра тяжести тела на исходный уровень в каждом последующем звене нашей многозвеньевой системы. Но создание гравитационного поля, то есть создания пространства между телом и точками его опоры, является непременным условием повторности процессов преобразования гравитационной энергии в механическую энергию движения. Это условие нами соблюдается благодаря не снижению центра тяжести, а приближению к нему в каждом последующем звене опорных плоскостей. При этом гравитационная энергия массы тела используется многократно.
Таким образом, в нашем устройстве центр тяжести тела на всем пути его следования остается на постоянной высоте по отношению к земной поверхности. Поэтому в дополнительной энергии для его поднятия в каждом последующем звене устройства нет необходимости. Эту роль выполняют восходящие наклонные плоскости, заложенные в саму конструкцию устройства.
ТЕХНИЧЕСКИЕ РЕЗУЛЬТАТЫ
Достигнута цель - сконструировано устройство, в котором:
1) происходит преобразование гравитационной энергии массы тела в механическую энергию поступательного движения;
2) осуществлена казалось бы неосуществимой возможность самодвижения без затраты дополнительной энергии, фактически создано устройство, в котором может происходить бесконечное самодвижение.
Устройство послужит основой для моделирования устройств по использованию гравитационной энергии в технике, в частности для строительства гравитационных электростанций.
Список литературы
1. Гаубе и Баррие. Экстерьер лошади. Орел, 1901.
2. Грабовский Р.И. Курс физики. Изд. 5. М. "Высшая школа", 1980.
3. Грудина Я.М. Динамика животного организма. Изд. Екатеринбургского горного училища. B.I. 1911.
4. Дюрст У. Экстерьер лошади. С.-Х. Изд. Ленинград, 1936.
5. Иваницкий М.Ф. К изучению центра тяжести человеческого тела. Тр. IV Всесоюзного съезда зоологов и морфологов. Киев, 1930.
6. Касьяненко З.Г. Предплюсна лошади в сравнительно-анатомическом и функциональном освещении. Тр. Киевского ветеринарного института. Т.10. Киев, 1950.
7. Ковалевский В.О. Палеонтология лошади. Изд. Акад. Наук СССР, 1948.
8. Манзий С.Ф. О роли винтовых поверхностей в запястье копытных. Изд. Акад. Наук УССР. Киев, 1956.
9. Марей Э. Механика животного организма. С.-П, 1875.
10. Михайлов А.Н. Дис. Морфология экстраорганных вен костей запястья крупного рогатого скота, содержащегося в различных условиях двигательной активности. Казань, 1979.
11. Михайлов Н.В. Биомеханические комплексы заплюсны, коленного сустава и их роль в движении лошади. Уч. записки Казанского ветеринарного института. Т.80, Казань, 1961.
12. Михайлов Н.В. Роль фасций и кожи в динамике конечностей лошади. Уч. Записки Каз. вет. ин-та. Т.80, 1961.
13. Михайлов Н.В. Макро-микроморфология нервов и биомеханика грудной клетки домашних млекопитающих и птиц. Казань, 1964, 600 с.
14. Михайлов Н.В. Механизм лечебно-стимулирующего действия луча лазера на организм животных и повышение их продуктивности. Издание Казанского университета. Казань, 1985, 197 с.
15. Михайлов Н.В. Бионергетические основы строения организма продуктивных животных. Казань, 1987, 50 с.
16. Новопольский В. Анатомические и механические данные механизма стояния лошади. Архив вет. наук С.-П. 1878.
17. Перельман Я.И. Занимательная физика. Кн. I. Чебоксары, 1994.
18. Успенский Д.З. Структура и роль пружинных суставов в работе конечностей лошади. Тр. Саратовского зоовет. ин-та, т.4, 1954.
19. Ухтомский А.А. Физиология двигательного аппарата. Собр. соч. Т.11, Ленинград, 1951.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЕБАТЕЛЬНЫЙ ТРЕНИНГ ДЛЯ ГОЛЕНОСТОПНОГО СУСТАВА (МЕТОД НИКОЛАЯ МИХАЙЛОВА) | 2004 |
|
RU2282428C2 |
| СПОСОБ ЛЕЧЕНИЯ АРТРОЗА КОЛЕННОГО СУСТАВА | 1992 |
|
RU2069965C1 |
| Пассивное ортопедическое вспомогательное средство в виде закрепляемого на копыте ортеза | 2023 |
|
RU2811271C1 |
| ВЕТЕРИНАРНОЕ ГОМЕОПАТИЧЕСКОЕ СРЕДСТВО ДЛЯ НАРУЖНОГО ПРИМЕНЕНИЯ ПРИ ЗАБОЛЕВАНИЯХ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2447894C1 |
| СПОСОБ ЛЕЧЕНИЯ ПЕРЕДНЕЗАДНЕЙ НЕСТАБИЛЬНОСТИ КОЛЕННОГО СУСТАВА | 1992 |
|
RU2064782C1 |
| КОЛЕБАТЕЛЬНАЯ ГИМНАСТИКА ДЛЯ ПЛЕЧЕВОГО СУСТАВА (МЕТОД НИКОЛАЯ МИХАЙЛОВА) | 1994 |
|
RU2117469C1 |
| СПОСОБ РЕАБИЛИТАЦИИ КОЛЕННОГО СУСТАВА | 2012 |
|
RU2496462C1 |
| СПОСОБ ЛЕЧЕНИЯ ПОВРЕЖДЕНИЙ СУХОЖИЛЬНО-СВЯЗОЧНЫХ СТРУКТУР КОНЕЧНОСТЕЙ ЖИВОТНЫХ | 2010 |
|
RU2419442C1 |
| Способ пластики передней крестообразной связки коленного сустава | 2019 |
|
RU2717369C1 |
| Способ восстановления повреждения корня мениска | 2020 |
|
RU2760280C1 |
Изобретение относится к наглядным пособиям для обучения в области механики. Устройство содержит двухконусное тело и две наклонно расходящиеся плоскости, выполненные подобно блоковым гребням коленного сустава лошади и предназначенные для взаимодействия с двухконусным телом. Устройство имеет многозвеньевую конструкцию, выполненнную так, что гравитационная энергия тела преобразуется в механическую энергию его поступательного движения. Технический результат - расширение арсенала технических средств по использованию гравитационной энергии тела в технических целях. 11 ил.
Устройство, преобразующее гравитационную энергию массы тела в механическую энергию его поступательного движения, выполненное на основе взаимодействия массы двухконусного тела с двумя наклонно расходящимися плоскостями, подобными блоковым гребням коленного сустава лошади, отличающееся тем, что оно имеет многозвеньевую конструкцию, в которой гравитационная энергия тела преобразуется в механическую энергию его поступательного движения.
| МИХАЙЛОВ Н.В | |||
| Биоэнергетические основы строения организма продуктивных животных | |||
| - Казань, 1987, стр | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |

