Изобретение относится к устройствам обработки сигналов звуковой частоты и служит для преобразования спектра исходного сигнала в соответствии с заданными психоакустическими требованиями. Процессор предназначен для применения в системах звукоусиления, включая воспроизведение и усиление сигналограмм, а также в системах записи звуковых сигналов.
Известно устройство, содержащее n полосовых фильтров, n усилителей с переменным коэффициентом усиления, усилитель с постоянным коэффициентом усиления и сумматор на (n+1) входов, выход которого является выходом устройства, входом которого служат объединенные входы n полосовых фильтров и усилителя с постоянным коэффициентом усиления, выходы n полосовых фильтров подключены к входам соответствующих n усилителей с переменным коэффициентом усиления, выходы которых подключены к соответствующим n входам сумматора, (n+1)-й вход которого соединен с выходом усилителя с постоянным коэффициентом усиления [Кисель В.А. Аналоговые и цифровые корректоры. Справочник. М.: Радио и связь, 1986, стр.131, рис.4.14а].
Устройство представляет собой n-полосный эквалайзер, позволяющий корректировать амплитудно-частотную характеристику тракта прохождения сигнала, влияя таким образом на спектр выходного сигнала. При этом эквалайзер не учитывает спектральные особенности входных сигналов. В результате сигналы с отличающимися спектрами подвергаются одной и той же частотной коррекции, что не позволяет рассматривать эквалайзер как автоматическое устройство, выполняющее эквализацию сигналов с различными спектральными свойствами, что является его существенным недостатком.
Наиболее близким по своей технической сущности и достигаемому эффекту к заявляемому устройству является психоакустический процессор (максимайзер), содержащий управляемый темброблок, фильтр высоких частот (ФВЧ), полосовой фильтр (ПФ) и блок управления, выход которого соединен с управляющим входом темброблока, выход которого является выходом процессора, входом которого служат объединенные входы ФВЧ, ПФ и темброблока, выходы ФВЧ и ПФ подключены к информационным входам блока управления [Чернецкий М. Психоакустические процессоры. - Звукорежиссер, 2002, №4, стр.4].
Психоакустический процессор-прототип самостоятельно анализирует спектр входного сигнала и в зависимости от соотношения энергий в высокочастотной и среднечастотной областях спектра усиливает либо ослабляет высокочастотные составляющие. Таким образом, удается в автоматическом режиме поддерживать в определенном соотношении баланс между среднечастотной и высокочастотной частями диапазона выходного сигнала независимо от спектральных свойств входного сигнала.
Недостатком прототипа являются ограниченные функциональные возможности, состоящие в адаптированной автоматической подстройке лишь высокочастотной части спектра корректируемого сигнала.
Технический результат, достигаемый при использовании настоящего изобретения, состоит в обеспечении возможности автоматической частотной коррекции по всей ширине спектра входного сигнала в соответствии с произвольно заданными требованиями,
Технический результат достигается тем, что в известный психоакустический процессор, содержащий первый полосовой фильтр и блок управления, первый вход из группы информационных входов которого соединен с выходом первого полосового фильтра, вход которого является входом процессора, согласно изобретению в него дополнительно введены (n-1) полосовых фильтров, n усилителей с переменным коэффициентом передачи и сумматор, входы (n-1) полосовых фильтров подключены к входу процессора, а выходы n полосовых фильтров подключены к входам n соответствующих усилителей, выходы которых подключены к соответствующим n входам сумматора, выход которого является выходом процессора, (n-1) входов из группы информационных входов блока управления соединены с выходами соответствующих (n-1) полосовых фильтров, а n выходов группы управляющих выходов блока управления соединены с управляющими входами n соответствующих усилителей, группа n эталонных входов блока управления является n-полосным эталонным входом процессора, управляющим входом которого служит управляющий вход блока управления.
Сущность изобретения иллюстрируется графиками и функциональными схемами.
На фиг.1 приведены графики, поясняющие принцип адаптивной частотной коррекции; на фиг.2 - функциональная схема психоакустического процессора; на фиг.3 - функциональная схема блока 4 управления; на фиг.4 - функциональная схема блока 8 регуляторов; на фиг.5 - функциональная схема регулятора 9.
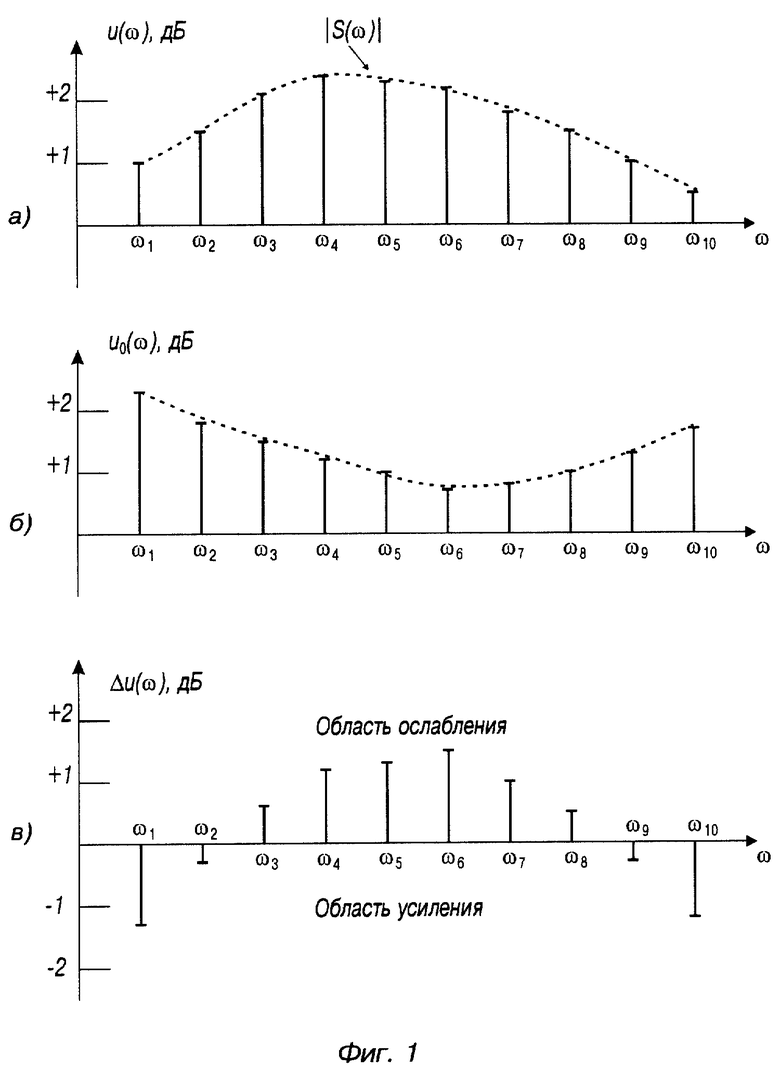
Графики по фиг.1 содержат:
- спектр S(ω) средневыпрямленных значений входного сигнала, представленный в качестве примера в виде десяти отсчетов u(ω) (фиг.1а);
- эталонные отсчеты uo(ω) - представляющие собой средневыпрямленные значения в назначенных десяти опорных точках (фиг.1б);
- разность отсчетов Δu(ω)=u(ω)-uо(ω) (фиг.1в).
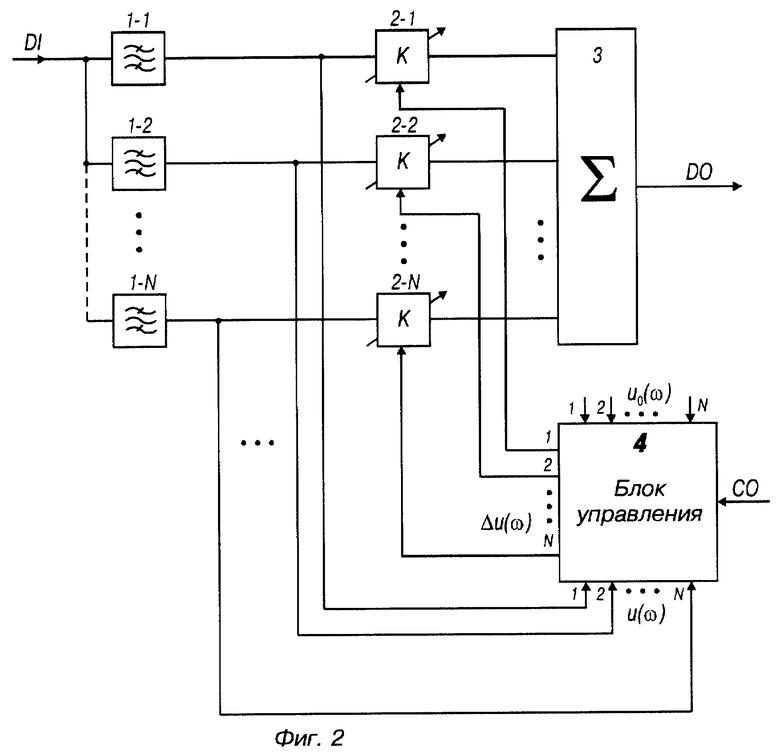
Функциональная схема (фиг.2) психоакустического процессора содержит группу 1 ПФ 1-1÷1-N, группу 2 усилителей с переменным коэффициентом передачи 2-1÷2-N, аналоговый сумматор 3 и блок 4 управления.
Входом DI психоакустического процессора являются объединенные входы NПФ 1, выходы которых подключены к входам соответствующих N усилителей 2, выходы которых подключены к N входам аналогового сумматора 3, выход которого является выходом DO процессора, управляющим входом СО которого служит управляющий вход блока 4 управления, управляющий выход Δu(ω) которого, состоящий из N каналов, подключен соответственно к N управляющим входам N усилителей 2, к N-канальному информационному входу u(ω) блока 4 управления подключены выходы N соответствующих ПФ 1, N-канальный эталонный вход uo(ω) блока 4 управления выполняет функции N-полосного эталонного входа процессора.
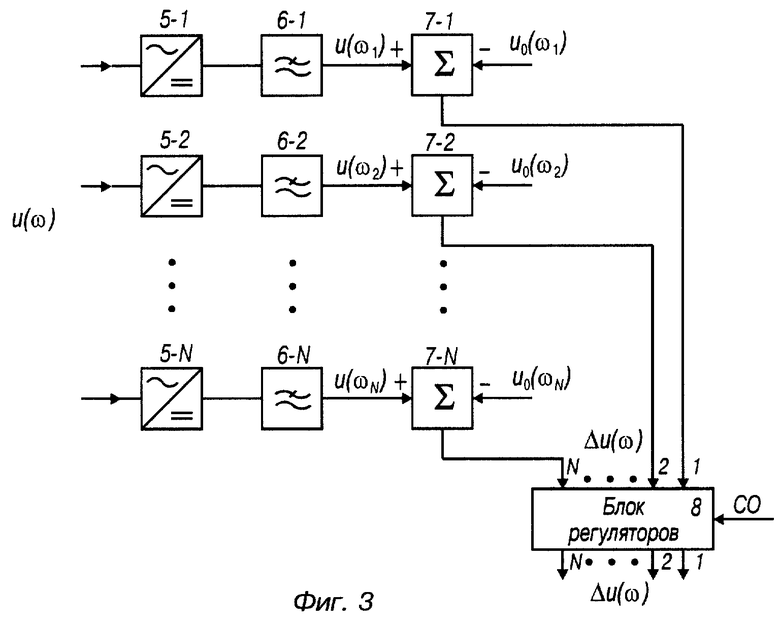
Функциональная схема (фиг.3) блока 4 управления содержит группу 5 детекторов, группу 6 фильтров низких частот (ФНЧ), группу 7 аналоговых сумматоров и блок 8 регуляторов. Выходы N детекторов группы 5 через соответствующие N ФНЧ 6 подключены к первым информационным входам соответствующих сумматоров 7, вторые информационные входы uo(ω) которых составляют N-канальный эталонный вход uо(ω) блока 4 управления, N-канальный информационный вход uо(ω) которого составляют соответствующие входы детекторов 5, выходы N сумматоров группы 7 подключены к соответствующим N входам Δu(ω) блока 8 регуляторов, выходы Δu(ωn) которого являются управляющим выходом Δu(ω) блока 4 управления, управляющим входом СО которого служит соответствующий вход блока 8 регуляторов.
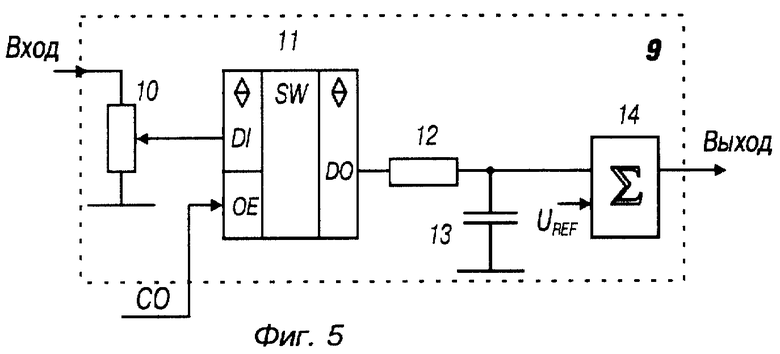
Блок 8 регуляторов (фиг.4) представляет собой линейку из N регуляторов 9, управляющие входы которых объединены и образуют единый управляющий вход СО блока 8, входами и выходами которого являются соответственно входы и выходы регуляторов 9. Каждый из регуляторов 9 может быть исполнен по функциональной схеме (фиг.5), содержащей потенциометр 10, аналоговый ключ 11, резистор 12, накопительный конденсатор 13 и аналоговый сумматор 14, выход которого является выходом регулятора, управляющим входом СО которого служит вход разрешения ОЕ ключа 11, информационный вход которого соединен со средним выводом потенциометра 10, один из крайних выводов которого является входом регулятора, а другой соединен с общей шиной, выход ключа 11 через резистор 12 подключен к первому входу сумматора 14, второй вход которого является входом напряжения UREF смещения регулятора, между первым входом сумматора 14 и общей шиной подключен накопительный конденсатор 13.
В основе функционирования заявляемого устройства лежит метод адаптивной частотной коррекции, состоящий в следующем.
В опорных точках по всему диапазону частот [ωн, ωв] (ωн и ωв - нижняя и верхняя границы частотного диапазона соответственно) обрабатываемого сигнала вычисляют значения величины u(ωn), несущей информацию об энергетических свойствах сигнала в узкой полосе частот Δω с центром в опорной точке ωn (n=1, 2, ... N). Указанной информативной величиной может быть, например, средневыпрямленное значение сигнала в данной полосе. Полученные N опорных значений (в нашем примере N=10), распределенные с интервалом Δω по оси частот ω (фиг.1а), описывают огибающую спектра u(ω) средневыпрямленных значений исходного сигнала. После чего оценку спектра исходного сигнала, вычисленную аппаратным путем, сравнивают в N опорных точках со спектром, заданным извне как эталонным uо(ω) (фиг.1б), форма которого и должна определить форму спектра выходного сигнала. Результатом сравнения будем считать разность Δu(ω)=u(ω)-uо(ω) (фиг.1в), вычисленную для N опорных точек, то есть Δu(ωn). Далее для приведения огибающей u(ω) к эталонному виду uо(ω) из значений u(ωn) вычитают разность Δu(ωn).
Таким образом, при частотной коррекции исходного сигнала учитываются не только эталонные требования, но еще и форма спектра корректируемого сигнала, что и обеспечивает возможность адаптивного управления процессом, который по своему характеру является процессом стабилизации формы спектра средневыпрямленных значений.
Психоакустический процессор (фиг.2), реализующий описанный метод, работает следующим образом.
Корректируемый сигнал подается на вход DI, откуда поступает на N ПФ1 для разбиения на N частотных полос с центрами ω1, ω2, ωN. На фиг.1а показан пример деления спектра входного сигнала на 10 полос, перекрывающих корректируемую часть спектра. Выделенные ПФ1 полосные сигналы поступают на соответствующие информационные входы u(ωn) блока 4 управления, где сравниваются по заранее определенным критериям с эталонными значениями, задаваемыми по многоканальному (многополосному) входу uо(ω) блока 4 (фиг.1б). Результат сравнения, представляющий собой N-мерный вектор управляющих воздействий ΔU, является разностью вектора полосовых сигналов
U={u(ω1), u(ω2), ... u(ωN)}
и N - мерного вектора эталонных значений
U0={u0(ω1), u0(ω2), ... u0(ωN)},
то есть ΔU=U-U0={Δu(ω1), Δu(ω2), ... Δu(ωN)}.
Последние N сигналов Δu(ωn) с выхода Δu(ω) блока 4 управления поступают на управляющие входы усилителей 2 с переменными коэффициентами передачи, воздействуя на коэффициенты передачи таким образом, что результат сравнения ΔU стремится к нулю. Для этого в общем случае коэффициент передачи n-го усилителя группы 2 должен увеличиваться, если Δu(ωn)<0 и уменьшаться, если Δu(ωn)>0: на графике (фиг.1в), иллюстрирующем картину управления коэффициентами передачи, показаны две области - усиления и ослабления.
Из представленной структуры (фиг.2) видно, что она является разомкнутой системой автоматического управления, где управляющий сигнал вырабатывается без учета значений результата управления, а только под действием входного сигнала, сравниваемого с эталонным. Такое решение позволяет функционально упростить процесс управления по сравнению с системами, замкнутыми цепью обратной связи, за счет формирования управляющих сигналов, не зависящих от выходных состояний управляемых активных цепей (в нашем примере усилителей 2). При этом появляется возможность введения в активные управляемые цепи дополнительных регулировок, не влияющих на процесс выработки управляющих воздействий и расширяющих возможности процессора в целом. Например, в усилители 2 может быть введена еще и ручная регулировка усиления, позволяющая звукорежиссеру субъективно проводить дополнительную коррекцию параллельно с автоматической.
Блок 4 управления (фиг.3) построен в предположении, что сигналы сравниваются по средневыпрямленным значениям. Следовательно, на N-полосный эталонный вход u0(ω) следует подавать предварительно вычисленные средневыпрямленные значения u0(ω1), u0(ω2), ... u0(ωN), описывающие требуемый характер эталонного спектра. Ответственным вопросом, касающимся блока 4 управления, является вопрос выбора постоянной времени ФНЧ 6, которая определяет, в свою очередь, длительность интервала усреднения полосовых сигналов. Заметим, что постоянные времени всех N фильтров 6 не обязательно должны быть равны друг другу, однако в нашем примере с целью упрощения изложения материала будем считать их равными.
Длительность интервала усреднения следует выбирать таким образом, чтобы, с одной стороны, не подавлялись информативные составляющие сигнала - значит, не быть достаточно малой, а с другой стороны, и не быть достаточно большой, поскольку необходимо обеспечить достаточную динамику управления. Причем, учитывая, что речь идет о психоакустическом восприятии информации, немалую роль будет играть субъективная составляющая оценки качества полученного звука. Кроме того, следует учитывать еще и особенности музыкального содержания сигнала. При обработке материала, отличающегося большой динамикой и богатой палитрой естественных, а не электронных звуков, на наш взгляд, интервал усреднения должен составлять примерно одну минуту. В случае же обработки достаточно простого и однородного материала, например поп-музыки, интервал усреднения без ущерба для восприятия может быть снижен до двух-трех десятков секунд. Отмеченное относится к случаю непрерывного регулирования, то есть непрерывной подачи управляющих воздействий на управляющие входы усилителей 2. Однако управление может быть еще и импульсным, характеризующееся тем, что управляющие сигналы вырабатываются непрерывно, а подаются в управляющие цепи только в определенные моменты времени. Для обеспечения такого режима управления, а также для изменения глубины коррекции в состав блока 4 управления введен блок 8 регуляторов (фиг.4).
Блок 8 регуляторов (фиг.4) состоит N из одинаковых регуляторов, пример схемотехнического исполнения которых показан на фиг.5. Блок 8 регуляторов управляет глубиной коррекции, включает и отключает коррекцию, а также запоминает значения Δu(ωn).
Для управления глубиной коррекции служит переменный резистор 10. Разрыв цепи коррекции происходит при СО=0 переводом ключа 11 в высокоимпедансное состояние на выходе. При этом на конденсаторе 13 сохраняется напряжение регулировки Δu(ωn), предшествовавшее моменту разрыва цепи. Сопротивление R 12 необходимо для защиты выходных каскадов ключа 11 от больших токов и должно выбираться по возможности небольшим, так как вместе с емкостью С конденсатора 13 оно образует постоянную времени RC, которую следует минимизировать до уровня, при котором образованная RC-цепъ не будет выполнять фильтрующих функций. Аналоговый сумматор 14 в регуляторе, как видно из схемы, служит для сложения управляющего напряжения Δu(ωn) с напряжением смещения UREF, которое определяет положение рабочей точки (точки покоя) регулировочной характеристики в отсутствие управляющих сигналов.
Под отключением коррекции, происходящем при СО=0, подразумевается отключение непрерывной коррекции и перевод процессора из непрерывного режима в импульсный, который реализуется подачей на вход СО импульсов, моменты появления которых задают моменты введения корректирующих воздействий. Длительности же указанных импульсов должны быть достаточными для отработки этих воздействий, подаваемых на управляющие входы усилителей 2. После прекращения действия управляющего импульса СО конденсатор 13 запоминает поступившие во время действия этого импульса управляющее напряжение Δu(ωn) и сохраняет его до поступления очередного импульса СО, а следовательно, и поддерживает коэффициент усиления n-го усилителя из группы 2 на заданном уровне. Разумеется, следует учитывать возможный разряд конденсатора через внешние цепи, поэтому в реальных схемах поддерживать коэффициент усиления на фиксированном уровне можно только на определенном временном интервале, на котором разрядом конденсатора можно пренебречь. Для полного отключения коррекции кроме выполнения условия СО=0 необходимо еще и первый вход (верхний по схеме) аналогового сумматора 14 соединить с общей шиной, полностью разряжая конденсатор 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПСИХОАКУСТИЧЕСКИЙ ПРОЦЕССОР (АДАПТИВНЫЙ ЭКВАЛАЙЗЕР БЕЗ ОБРАТНЫХ СВЯЗЕЙ) | 2003 |
|
RU2241305C1 |
| ПСИХОАКУСТИЧЕСКИЙ ПРОЦЕССОР (АДАПТИВНЫЙ ЭКВАЛАЙЗЕР) | 2002 |
|
RU2237964C2 |
| АДАПТИВНЫЙ ЭКВАЛАЙЗЕР (ВАРИАНТЫ) | 2004 |
|
RU2279758C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ АДАПТИВНОЙ ЧАСТОТНОЙ КОРРЕКЦИИ (ВАРИАНТЫ) | 2004 |
|
RU2284648C2 |
| ПСИХОАКУСТИЧЕСКИЙ ПРОЦЕССОР | 2004 |
|
RU2279759C2 |
| ОДНОКАНАЛЬНЫЙ СТОХАСТИЧЕСКИЙ ИЗМЕРИТЕЛЬ КОЭФФИЦИЕНТА УСИЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2235339C1 |
| СПОСОБ ОЦЕНКИ ЧАСТОТНЫХ ИСКАЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2308042C2 |
| ИЗМЕРИТЕЛЬ КОЭФФИЦИЕНТА УСИЛЕНИЯ | 2003 |
|
RU2242016C2 |
| СПОСОБ НАСТРОЙКИ ЗВУКОВОСПРОИЗВОДЯЩЕГО ТРАКТА | 2005 |
|
RU2297712C2 |
| СПОСОБ НАСТРОЙКИ ТРАКТА ВОСПРОИЗВЕДЕНИЯ СИГНАЛОГРАММЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2300171C2 |

Изобретение относится к устройствам автоматической частотной коррекции сигналов звуковой частоты. Его использование позволяет получить технический результат в виде возможности автоматической частотной коррекции по всей ширине спектра входного сигнала в соответствии с произвольно заданными требованиями. Технический результат достигается за счет того, что принцип действия процессора, содержащего полосовые фильтры, группы усилителей с переменным коэффициентом передачи, аналогового сумматора и блока управления, состоит в сравнении спектра исходного сигнала с эталонными значениями, определяющими требуемую форму спектра на выходе, формировании управляющих воздействий и прямой передаче этих воздействий на управляемые усилители, без образования контуров обратной связи. 5 ил.
Психоакустический процессор, содержащий первый полосовой фильтр и блок управления, первый вход из группы информационных входов которого соединен с выходом первого полосового фильтра, вход которого является входом процессора, отличающийся тем, что в него дополнительно введены (n-1) полосовых фильтров, n усилителей с переменным коэффициентом передачи и сумматор, входы (n-1) полосовых фильтров подключены к входу процессора, а выходы n полосовых фильтров подключены к входам n соответствующих усилителей, выходы которых подключены к соответствующим n входам сумматора, выход которого является выходом процессора, (n-1) входов из группы информационных входов блока управления соединены с выходами соответствующих (n-1) полосовых фильтров, а n выходов группы управляющих выходов блока управления соединены с управляющими входами n соответствующих усилителей, группа n эталонных входов блока управления является n-полосным эталонным входом процессора, управляющим входом которого служит управляющий вход блока управления.
| ЧЕРНЕЦКИЙ М | |||
| Психоакустические процессоры | |||
| Звукорежиссер, 2002, №4, с.4 | |||
| КИСЕЛЬ В.А | |||
| Аналоговые и цифровые корректоры | |||
| Справочник | |||
| - М.: Радио и связь, 1986, с.131 и 132, рис.4.14а | |||
| US 5450253 А, 12.09.1995 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Цифровой адаптивный корректор сигнала с парциальным откликом | 1982 |
|
SU1073890A1 |
