Изобретение относится к устройствам обработки сигналов звуковой частоты и служит для преобразования спектра исходного сигнала в соответствии с заданными психоакустическими требованиями. Эквалайзер предназначен для применения в системах звукоусиления, включая воспроизведение и усиление сигналограмм, а также в системах записи звуковых сигналов.
Известно устройство, содержащее n полосовых фильтров, n усилителей с переменным коэффициентом усиления, усилитель с постоянным коэффициентом усиления и сумматор на (n+1) входов, выход которого является выходом устройства, входом которого служат объединенные входы n полосовых фильтров и усилителя с постоянным коэффициентом усиления, выходы n полосовых фильтров подключены к входам соответствующих n усилителей с переменным коэффициентом усиления, выходы которых подключены к соответствующим n входам сумматора, (n+1)-й вход которого соединен с выходом усилителя с постоянным коэффициентом усиления [Кисель В.А. Аналоговые и цифровые корректоры: Справочник. М.: Радио и связь, 1986, стр.81, рис.4.14а].
Устройство представляет собой n-полосный эквалайзер, позволяющий корректировать амплитудно-частотную характеристику тракта прохождения сигнала, влияя таким образом на спектр выходного сигнала. При этом эквалайзер не учитывает спектральные особенности входных сигналов. В результате сигналы с отличающимися спектрами подвергаются одной и той же частотной коррекции, что не позволяет рассматривать эквалайзер как автоматическое устройство, выполняющее эквализацию сигналов с различными спектральными свойствами, что является его существенным недостатком.
Наиболее близким по своей технической сущности и достигаемому эффекту к заявляемому устройству является психоакустический процессор (максимайзер), содержащий управляемый темброблок, фильтр высоких частот (ФВЧ), полосовой фильтр (ПФ) и блок управления, выход которого соединен с управляющим входом темброблока, выход которого является выходом процессора, входом которого служат объединенные входы ФВЧ, ПФ и темброблока, выходы ФВЧ и ПФ подключены к информационным входам блока управления [Чернецкий М. Психоакустические процессоры. - Звукорежиссер, 2002, №4, стр.4].
Принятый в качестве прототипа психоакустический процессор самостоятельно анализирует спектр входного сигнала и в зависимости от соотношения энергий в высокочастотной и среднечастотной областях спектра усиливает либо ослабляет высокочастотные составляющие. Таким образом, удается в автоматическом режиме поддерживать в определенном соотношении баланс между среднечастотной и высокочастотной частями диапазона выходного сигнала независимо от спектральных свойств входного сигнала.
Недостатком прототипа являются ограниченные функциональные возможности, состоящие в адаптированной автоматической подстройке лишь высокочастотной части спектра корректируемого сигнала.
Технический результат, достигаемый при использовании настоящего изобретения, состоит в обеспечении возможности автоматической частотной коррекции по всей ширине спектра входного сигнала в соответствии с произвольно заданными требованиями.
По первому варианту технический результат достигается тем, что в адаптивный эквалайзер, содержащий управляемый темброблок и блок управления, управляющий выход которого соединен с управляющим входом управляемого темброблока, вход и выход которого являются соответственно входом и выходом эквалайзера, согласно изобретению введен спектроанализатор, управляемый темброблок выполнен n-полосным, блок управления предназначен для управления каждой из n полос темброблока, информационный вход блока управления соединен с выходом спектроанализатора, вход которого объединен с входом управляемого темброблока, эталонный вход блока управления является эталонным входом процессора, служащим для задания формы спектра выходного сигнала.
По второму варианту технический результат достигается тем, что в адаптивный эквалайзер, содержащий управляемый темброблок и блок управления, управляющий выход которого соединен с управляющим входом управляемого темброблока, вход и выход которого являются соответственно входом и выходом эквалайзера, согласно изобретению введен спектроанализатор, управляемый темброблок выполнен n-полосным, блок управления предназначен для управления каждой из n полос темброблока, информационный вход блока управления соединен с выходом спектроанализатора, вход которого подключен к выходу управляемого темброблока, эталонный вход блока управления является эталонным входом процессора, служащим для задания формы спектра выходного сигнала.
Сущность изобретения иллюстрируется чертежами.
На фиг.1 приведены графики, поясняющие принцип адаптивной частотной коррекции; на фиг.2 - функциональная схема адаптивного эквалайзера по первому варианту; на фиг.3 - функциональная схема адаптивного эквалайзера по второму варианту; на фиг.4 - функциональная схема одного из возможных вариантов реализации блока 3 управления.
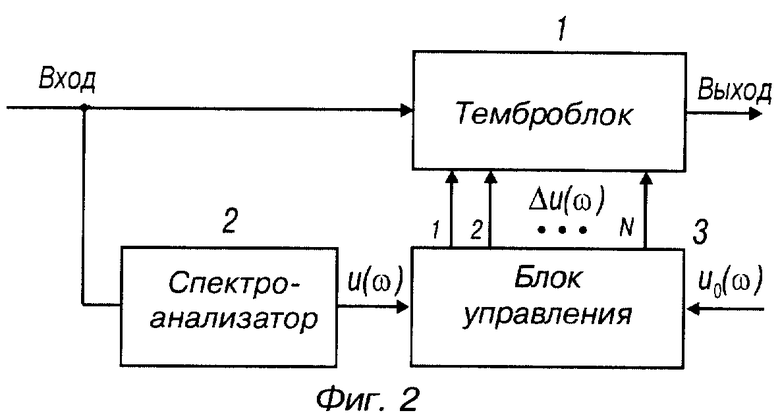
Графики по фиг.1 содержат:
- спектр |S(ω)| входного сигнала, представленный в качестве примера в виде десяти отсчетов u(ω) (фиг.1а);
- эталонные отсчеты u0(ω), представляющие собой значения спектра в назначенных десяти опорных точках (фиг.1б);
- разность отсчетов Δu(ω)=u(ω)-u0(ω) (фиг.1в).
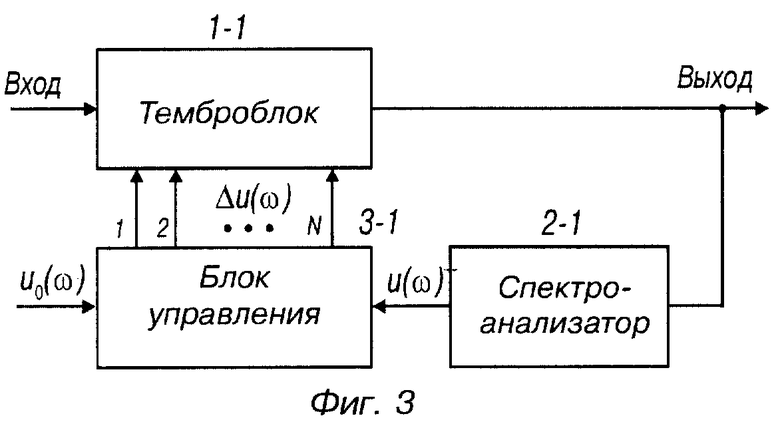
Функциональная схема по фиг.2 содержит управляемый темброблок 1, спектроанализатор 2 и блок 3 управления. Входом адаптивного эквалайзера являются объединенные входы темброблока 1 и спектроанализатора 2, выход которого подключен к информационному входу u(ω) блока 2 управления, N управляющих выходов Δu(ω) которого подключены к соответствующим N управляющим входам управляемого темброблока 1, эталонный вход u0(ω) блока 3 управления выполняет функции эталонного входа процессора, выход темброблока является выходом адаптивного эквалайзера.
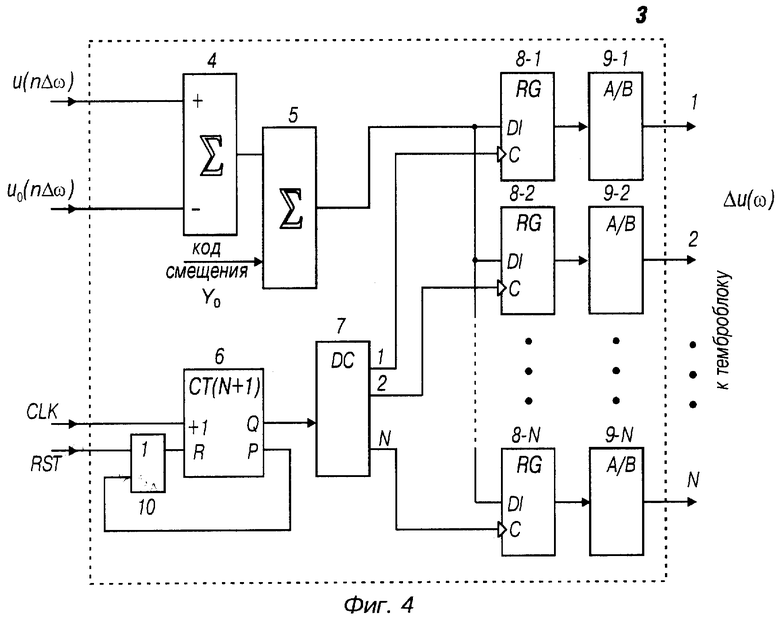
Функциональная схема по фиг.3 содержит управляемый темброблок 1-1, спектроанализатор 2-1 и блок 3-1 управления. Входом адаптивного эквалайзера является вход темброблока 1-1, к выходу которого подключен вход спектроанализатора 2-1, выход которого подключен к информационному входу u(ω) блока 3-1 управления, N управляющих выходов Δu(ω) которого подключены к соответствующим N управляющим входам управляемого темброблока 1-1, эталонный вход u0(ω) блока 3-1 управления выполняет функции эталонного входа процессора, выход темброблока является выходом адаптивного эквалайзера.
Функциональная схема по фиг.4 содержит блок 4 вычитания, сумматор 5, адресный счетчик 6, дешифратор 7 адреса, группу 8 регистров 8-1÷8-N, группу 9 преобразователей 9-1÷9-N и элемент 10 ИЛИ. Первый вход блока 4 вычитания является информационным входом u(nΔω) блока 3, второй вход блока 4 вычитания служит эталонным входом u0(nΔω) блока, выход блока 4 вычитания соединен с первым входом сумматора 5, второй вход которого является входом кода смещения Y0, выход сумматора 5 соединен с объединенными информационными входами DI регистров группы 8, выходы которых подключены к входам соответствующих преобразователей группы 9 (выход n-го регистра ко входу n-го преобразователя), тактовые входы С регистров группы 8 подключены к соответствующим N выходам дешифратора 7, вход которого соединен с разрядным выходом Q счетчика 6, выход переноса Р которого соединен с первым входом элемента 10 ИЛИ, второй вход которого является входом RST обнуления (начальной установки) блока 3 управления, тактовый вход счетчика 6 является синхровходом CLK блока 3 управления, выходом которого служат выходы N преобразователей группы 9, предназначенные для соединения с управляемым темброблоком.
В основе функционирования заявляемого устройства лежит метод адаптивной частотной коррекции, состоящий в следующем.
В опорных точках по всему диапазону частот [ωН; ωВ] (ωН и ωВ - нижняя и верхняя границы частотного диапазона соответственно) обрабатываемого сигнала вычисляют значения величины u(ωn), несущей информацию об энергетических свойствах сигнала в узкой полосе частот Δω с центром в опорной точке ωn (n=1, 2,...N). Указанной информативной величиной может быть, например, средневыпрямленное значение сигнала в данной полосе или в случае применения дискретного преобразования Фурье, под u(ωn) следует считать амплитуды гармоник. Полученные N опорных значений (в нашем примере N=10), распределенных с интервалом Δω по оси частот ω (фиг.1а), описывают огибающую спектра u(ω) средневыпрямленных значений (амплитуд гармоник) исходного сигнала. После чего оценку спектра исходного сигнала, вычисленную аппаратным путем, сравнивают в N опорных точках со спектром, заданным извне как эталонным u0(ω) (фиг.1б), форма которого и должна определить форму спектра выходного сигнала. Результатом сравнения будем считать разность Δu(ω)=u(ω)-u0(ω) (фиг.1в), вычисленную для N опорных точек, то есть Δu(ωn). Далее для приведения огибающей u(ω) к эталонному виду u0(ω) из значений u(ωn) вычитают разность Δu(ωn).
Таким образом, при частотной коррекции исходного сигнала учитываются не только эталонные требования, но еще и форма спектра корректируемого сигнала, что и обеспечивает возможность адаптивного управления процессом, который по своему характеру является процессом стабилизации формы спектра выходного сигнала.
Адаптивный эквалайзер (фиг.2), реализующий описанный метод, работает следующим образом.
Корректируемый сигнал подается на вход управляемого темброблока 1 и одновременно на вход спектроанализатора 2. Данные анализа спектра входного сигнала в N точках ω1, ω2,...ωN поступают на информационный вход u(ωn) блока 3 управления, где сравниваются по заранее определенному критерию с эталонными значениями, задаваемыми по входу u0(ω) блока 3 (фиг.1б). Результат сравнения, представляющий собой N-мерный вектор управляющих воздействий ΔU, является разностью вектора полосовых сигналов
U={u(ω1), u(ω2),...u(ωN)}
и N-мерного вектора эталонных значений
U0={u0(ω1), u0(ω2),...u0(ωN)},
то есть ΔU=U-U0={Δu(ω1),Δu(ω2),...Δu(ωN)}.
Последние N сигналов Δu(ωn) с выхода Δu(ω) блока 3 управления поступают на управляющий вход управляемого темброблока 1, воздействуя на коэффициенты передачи в спектральных областях Δωn, таким образом, что результат сравнения ΔU стремится к нулю. Для этого в общем случае коэффициент передачи в области Δωn должен увеличиваться, если Δu(ωn)<0, и уменьшаться, если Δu(ωn)>0: на графике (фиг.1в), иллюстрирующем картину управления коэффициентами передачи, показаны две области - усиления и ослабления.
Из представленной структуры - первого варианта адаптивного эквалайзера (фиг.2) видно, что она является разомкнутой системой автоматического управления, где управляющий сигнал вырабатывается без учета значений результата управления, а только под действием входного сигнала, сравниваемого с эталонным. Схема по фиг.3 (второй вариант) напротив представляет собой замкнутую систему с обратной связью, которой присущи все достоинства систем с обратными связями.
Применение первого варианта адаптивного эквалайзера позволяет функционально упростить процесс управления по сравнению с системами, замкнутыми цепью обратной связи, за счет формирования управляющих сигналов, не зависящих от выходных состояний управляемых активных цепей (в нашем примере темброблока 1). При этом появляется возможность введения в активные управляемые цепи дополнительных регулировок, не влияющих на процесс выработки управляющих воздействий и расширяющих возможности процессора в целом. Например, в темброблок 2 может быть введена еще и ручная регулировка усиления, позволяющая звукорежиссеру субъективно проводить дополнительную коррекцию параллельно с автоматической.
Рассмотрим далее один из возможных вариантов построения блока 3 управления, предназначенного для работы с цифровыми отсчетами, полученными в предположении, что спектроанализатор 2 цифровой и на входы u(ω) и u0(ω) поступает последовательность отсчетов - значений амплитуд гармоник u(nΔω) и u0(nΔω) соответственно и вычисленных методом дискретного преобразования Фурье при условии, что n=1, 2...N (N - общее число гармоник), а Δω - шаг расположения отсчетов по оси частот. В частном случае от гармоники с нулевой частотой можно и отказаться.
Будем считать, что отсчеты u(nΔω) и u0(nΔω) в двух каналах во времени появляются одновременно, сопровождаются синхроимпульсами CLK и, кроме того, смена отсчетов в каждом из каналов происходит с тактовой частотой CLK. В предлагаемой схеме (фиг.4) блока 3 данные сравниваются путем вычисления их разности u(nΔω)-u0(nΔω) в блоке 4. Далее в сумматоре 5 добавляется постоянная Y0 и затем N полученных величин
Δu(nΔω)=u(nΔω)-u0(nΔω)+Y0
распределяются по N регистрам группы 8. Занесенные в регистры 8-1÷8-N двоичные коды N величин Δu(nΔω) преобразуются в преобразователях группы 9 в сигналы управления темброблоком 1. В случае аналогового темброблока 1, управляемого напряжениями, значения которых определяют коэффициент передачи в заданных спектральных окнах, в качестве преобразователей группы 9 можно использовать низкоскоростные цифроаналоговые преобразователи. Код смещения Y0 необходим для задания необходимого постоянного напряжения смещения, управляющего темброблоком 1. Значение его выбирают исходя из диапазона изменений величины Δu(nΔω), диапазона требуемых регулировок и параметров управляющих цепей темброблока 1. Значение кода Y0 должно быть таким, чтобы при u(nΔω)-u0(nΔω)=0 напряжение смещения, подаваемое на каждый из управляющих входов темброблока 1, соответствовало бы режиму пропускания сигнала без изменений его амплитуды.
Управляет поочередной записью кодов Δu(nΔω) в регистры 8 узел, состоящий из адресного счетчика 6 и дешифратора 7. Модуль пересчета счетчика 6 выбирают на единицу больше количества отсчетов N. Это позволяет использовать обнуленное состояние счетчика как исходное и запрещающее запись данных в регистры 8. С появлением первого синхроимпульса CLK счетчик 6 устанавливает на выходе Q код единицы и активизирует, таким образом, выход дешифратора 7 с порядковым номером "1" (нумерация выходов дешифратора 7 начинается с нуля; нулевой выход не используется). Поскольку данный процесс протекает скачкообразно, то положительный перепад напряжений на выходе "1" дешифратора 7 разрешает синхронную запись информации о первом отсчете Δu(Δω) в первый регистр 8-1. Далее с приходом второго синхроимпульса, сопровождающего следующий отсчет Δu(2Δω) счетчик 6 переходит в состояние, соответствующее числу "2", и логический перепад формируется уже на втором выходе дешифратора 7, разрешая, таким образом, запись в регистр 8-2. Указанным путем потактно производится запись и в другие регистры 8. После того как в группу 8 будет записан последний отсчет, счетчик 6 обнулится и на этом цикл первой записи данных закончится. Все последующие циклы аналогичны первому и служат для обновления информации в регистрах 8. Вход RST предназначен для первоначального обнуления блока управления.
Для реализации импульсного режима введения корректирующих воздействий синхроимпульсы следует подавать не непрерывно, а по мере необходимости в виде пакетов импульсов.
Изобретение относится к устройствам обработки сигналов звуковой частоты и служит для преобразования спектра входного сигнала в соответствии с заданными психоакустическими требованиями. Эквалайзер предназначен для применения в системах звукоусиления, включая воспроизведение и усиление сигналограмм, а также в системах записи звуковых сигналов. Эквалайзер содержит управляемый темброблок, спектроанализатор и блок управления. Принцип действия устройства состоит в сравнении спектра обрабатываемого сигнала с эталонными значениями, определяющими требуемую форму спектра на выходе, формировании управляющих воздействий и передаче этих воздействий на управляемые цепи темброблока. Технический результат состоит в обеспечении возможности автоматической частотной коррекции по всей ширине спектра входного сигнала в соответствии с произвольно заданными требованиями. 4 н. и 7 з.п. ф-лы, 4 ил.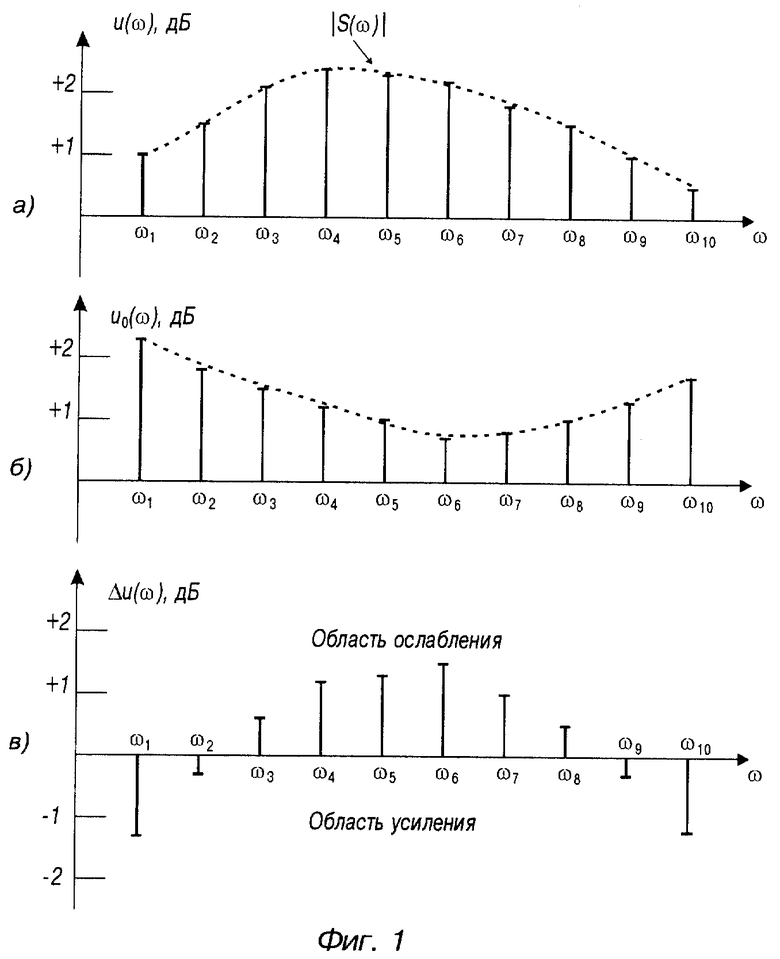
| ДЕКОДЕР ЦИФРОВОГО ТЕЛЕВИЗИОННОГО СИГНАЛА С НЕСКОЛЬКИМИ НЕСУЩИМИ | 1994 |
|
RU2125346C1 |
| ПРОСТРАНСТВЕННАЯ ЗВУКОВОСПРОИЗВОДЯЩАЯ СИСТЕМА | 1993 |
|
RU2038704C1 |
| US 5450253 А, 12.09.1995 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Цифровой адаптивный корректор сигнала с парциальным откликом | 1982 |
|
SU1073890A1 |

