Предлагаемая автоматизированная система управления вооружением (АСУВ) относится к военной технике, а более конкретно к АСУВ, устанавливаемых на подвижных объектах: танках, БМП, БТР, судах, вертолетах и др. Подобные АСУВ позволяют автоматизировать процессы учета условий стрельбы, определения углов прицеливания и бокового упреждения, а также введения поправок в положение вооружения в момент выстрела.
Кроме того, применение АСУВ позволяет существенно улучшить условия работы личного состава при оружии, например при стрельбе, за счет облегчения выполнения ими ряда функций: переброс вооружения в новом направлении, расчет значения поправок на отклонение условий стрельбы от нормальных и др. От эффективности АСУВ зависит эффективность вооружения в целом.
Известна система вооружения танков Т-34 (см., например, “Руководство по материальной части и эксплуатации танка Т-34-85”. М.: Воениздат, 1963, 12-200 с.). Она состоит из пульта управления, орудия, электропривода наведения орудия по горизонтали с блоком его включения, ручного привода наведения орудия по вертикали и прицела. Эта система имеет существенные недостатки. Достаточно эффективная стрельба с помощью этой системы управления возможна только с места. При этом наведение орудия по вертикали с помощью лишь ручного привода наведения требовало больших затрат времени и мышечной энергии. Вероятность попадания при стрельбе с ходу не превышала 3-5%.
Известна АСУВ танков первого послевоенного поколения Т-55 и Т-62 (см., например, “Руководство по материальной части и эксплуатации танка Т-55”. М.: Воениздат, 1965 г.). Каждая из АСУВ этих танков содержит пульт управления, орудие, автоматизированные приводы наведения орудия в вертикальной и горизонтальной плоскостях с блоком их включения и стабилизатором вооружения. Эффективность этих систем существенно возросла. Она обеспечивается введением автоматизированных приводов наведения и стабилизаторов в двух плоскостях. Значительно возросла точность стрельбы Достигаемая вероятность попадания при этом не ниже 50%. Возросло быстродействие вооружения и удобство его наведения за счет автоматизации наведения и исключения в этом режиме ручного труда. Благодаря этому улучшились эргономические условия на рабочих местах экипажа, прежде всего наводчика. Однако для этих систем также характерны недостатки. Переход с ручного режима наведения орудия на автоматизированный сложен для наводчика. Он требует значительных усилий и хороших навыков, а также умения точно определять время выхода на режим гироскопов. В случае нарушения последовательности переключения или раннего перехода с ручного режима на автоматизированный, срывается управление орудием, возможны поломки привода и травмы наводчика. В стрессовых ситуациях частость ошибок наводчика возрастает, так как в состоянии эмоциональной напряженности в значительной степени нарушается чувство времени (см., например, Ахутин В.М, Зараковский Г.М и др. Инженерная психология в военном деле. М: Воениздат, 1983. - с.82). При увеличении скорости движения танка точность стрельбы существенно снижается. Это объясняется тем, что совмещение с целью зависимой линии прицеливания, связанной с вооружением, приводит к тому, что ошибки слежения за целью определяются возмущениями, действующими на вооружение, которые велики (в горизонтальной плоскости ошибки при стрельбе с ходу достигают 2 т.д.).
Следует также отметить, что измерение дальности в этих АСУВ до цели производится с помощью дальномерных шкал, что обусловливает большую погрешность (более 10% от измеренной дальности) ее измерения, а, следовательно, и погрешность в определении угла прицеливания. Поэтому при стрельбе из танков Т-55 и Т-62 вероятность попадания, как правило, не превышает 50%, а дальность эффективного огня составляет всего лишь 1400-1600 м.
Известна также автоматизированная система управления вооружением танка Т-80Б (см., например, Танк Т-80Б. ТО и ИЭ. Кн.1. М.: Воениздат, 1984, с. 46-95). Эта система по технической сути и существенным признакам является наиболее близкой к заявляемой и принята за ее прототип. Одновременно она является базовым объектом предлагаемой системы и содержит пульт управления, орудие, ручной и автоматизированный приводы наведения орудия и кинематически связанный с орудием прицел с установленными в нем первым индикатором, блоком включения автоматизированного наведения орудия и последовательно соединенными ручным приводом арретира, арретиром, стабилизатором линии прицеливания и оптической формирующей системой, при этом второй выход арретира связан с первым индикатором, второй вход стабилизатора линии прицеливания соединен с выходом блока включения автоматизированного наведения орудия, третий - с выходом пульта управления, а второй выход - через автоматизированный привод наведения орудия соединен с орудием.
Эффективность этой системы по сравнению с предшествующей существенно возросла. Дальность эффективной стрельбы увеличилась до 2200-2500 м. Скорость движения танка при стрельбе также увеличилась и составляет 25-30 км/ч. Повышение эффективности достигнуто, прежде всего, за счет реализации в этих системах независимой линии прицеливания и автоматического ввода поправок. Это потребовало введения в систему управления ряда дополнительных элементов, например стабилизатора линии прицеливания, блока разрешения выстрела и др., что существенно повысило плотность компоновки вооружения и обеспечивающих его систем, увеличило количество органов управления, что усложнило деятельность наводчика при вооружении. Например, наводчику трудно дотянуться со своего рабочего места до рукоятки ручного привода арретира, а при надетом зимнем комбинезоне и движении танка - практически невозможно. Опыт показывает, что, пытаясь перевести эту рукоятку из одного положения в другое для снятия со стопора (арретира) или постановки на стопор стабилизатора линии прицеливания наводчики в условиях тесноты и отсутствия визуальной видимости незаметно для себя ошибочно переключают другие органы управления (например, лазерным дальномером), что в ряде случаев либо исключает выполнение огневой задачи, либо существенно увеличивает время на ее выполнение. Несовершенные, с точки зрения эргономики, органы переключения режимов наведения (ручной или автоматизированный) в условиях плотной компоновки существенно затягивают процессы включения и выключения АСУВ, а в стрессовых ситуациях могут быть причиной невыполнения поставленной задачи. Кроме того, переключение режимов, как и в предыдущей системе, требует сноровки, умения, значительных физических усилий и умения определять время готовности стабилизатора линии прицеливания.
Целью настоящего изобретения является устранение вышеперечисленных недостатков, повышение быстродействия и надежности автоматизированной системы управления вооружением танка, а также улучшение эргономических условий работы наводчика.
Указанная цель достигается тем, что известная автоматизированная система управления вооружением, содержащая пульт управления, ручной и автоматизированный приводы наведения орудия и кинематически связанный с орудием прицел с установленными в нем первым индикатором, блоком включения автоматизированного наведения орудия и последовательно соединенными ручным приводом арретира, арретиром, стабилизатором линии прицеливания и оптической формирующей системой, при этом второй выход арретира связан с первым индикатором, второй вход стабилизатора линии прицеливания соединен с выходом блока включения автоматизированного наведения орудия, третий - с выходом пульта управления, а второй выход - с автоматизированным приводом наведения орудия, снабжена вторым и третьим индикаторами, реле времени, электромагнитным приводом арретира и электромагнитной муфтой, первый вход которой кинематически соединен с ручным приводом наведения орудия, второй и третий - электрически соединены с выходами соответственно блока включения автоматического наведения орудия и арретира, первый выход кинематически соединен с орудием, а второй электрически соединен со вторым входом автоматизированного привода наведения орудия, вход реле времени подключен к выходу блока включения автоматизированного привода наведения, выход электромагнитного привода арретира соединен со вторым входом арретира, при этом вход второго индикатора соединен со вторым выходом реле времени, а выход оптически сопряжен с полем зрения оптической формирующей системы, вход третьего индикатора соединен с третьим выходом реле времени, а его выход подключен к наушникам шлемофона наводчика, ведущие элементы электромагнитной муфты установлены на выходном валу ручного привода наведения орудия, а ведомые - через вал и закрепленную на нем шестерню постоянно соединены с зубчатым сектором орудия, корпус электромагнитного привода арретира установлен в прицеле, а якорь соединен с подвижной муфтой стопора арретира, при этом третий выход реле времени соединен со входом электромагнитного привода арретира.
Введение новых элементов и связей позволяет осуществить прежде всего дистанционное управление автоматизированной системой управления вооружением, которое освобождает наводчика от необходимости прикладывать значительные физические усилия, протискиваться к органам управления, кроме того, количество органов управления, на которые воздействует наводчик, уменьшилось до одного (блока включения автоматизированного наведения). Это обеспечивает повышение быстродействия и надежности включения и выключения АСУВ.
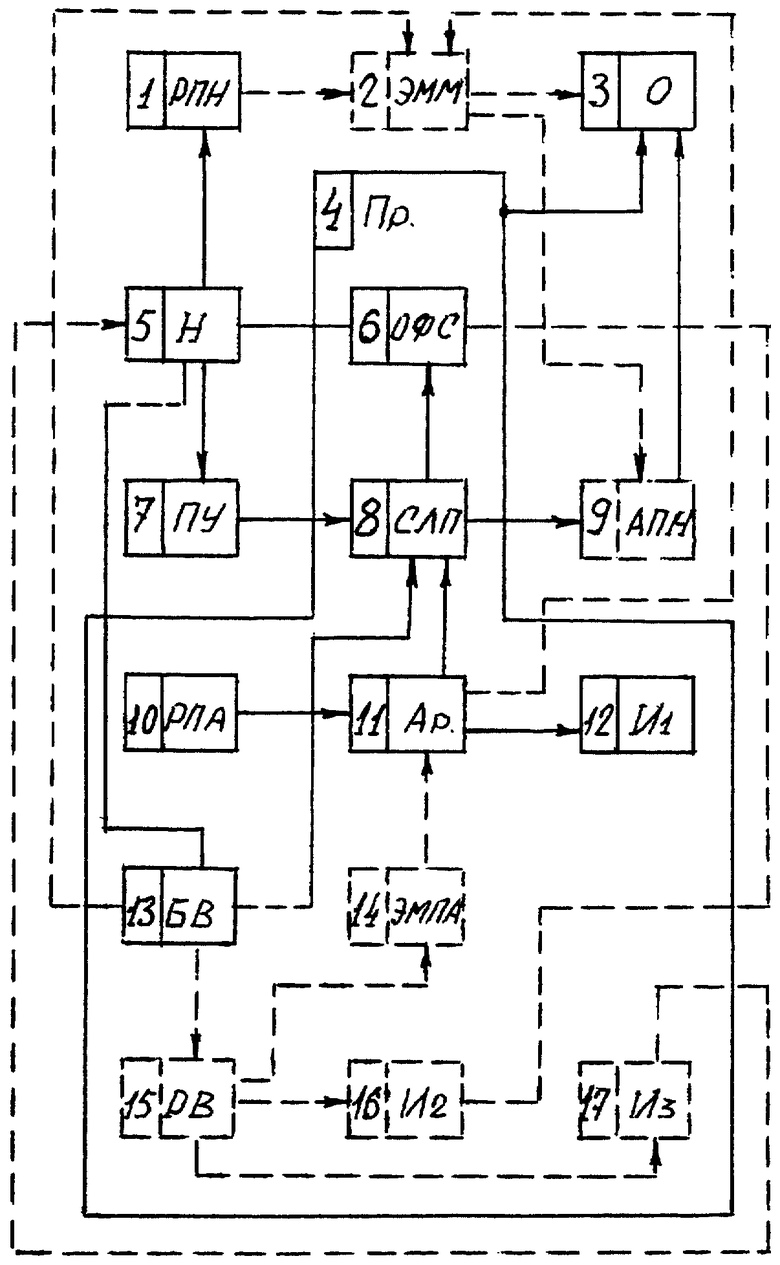
Изобретение поясняется чертежом, на котором показаны взаимное расположение и связи элементов предлагаемой автоматизированной системы управления вооружением и приняты следующие обозначения (предлагаемые элементы и связи на чертеже показаны пунктиром, а сплошными линиями изображены элементы и связи прототипа):
1 - ручной привод наведения орудия (РПН),
2 - электромагнитная муфта (ЭММ),
3 - орудие (О),
4 - прицел (Пр.),
5 - наводчик (Н),
6 - оптическая формирующая система (ОФС),
7 - пульт управления (ПУ),
8 - стабилизатор линии прицеливания (СЛП),
9 - автоматизированный привод наведения орудия (АПН),
10 - ручной привод арретира (РПА).
11 - арретир (Ар.),
12 - первый индикатор (И1),
13 - блок включения автоматизированного наведения (БВ),
14 - электромагнитный привод арретира (ЭМПА),
15 - реле времени (РВ),
16 - второй индикатор (И2),
17 - третий индикатор (И3).
Введенные элементы широко используются в оборонной промышленности и не вызывают затруднений при изготовлении предложенной АСУВ.
Работа предложенной АСУВ происходит следующим образом.
При включении бортсети танка и блока включения 13 напряжение от преобразователя напряжения (не показан) подается на стабилизатор линии прицеливания 8. Гироскоп (или гироскопы) начинают разгоняться. Одновременно от блока включения 13 подается сигнал и на электромагнитную муфту 2, запитывая ее и подготавливая к включению, и на реле времени 15, которое через некоторое время, необходимое на разгон гироскопов (в прототипе 1,5-2 мин), подает сигнал на второй 16 и третий 17 индикаторы. Второй индикатор представляет собой световой датчик и благодаря связи с полем зрения оптической формирующей системы сигнализирует наводчику о том, что гироскопы вышли на режим, а третий индикатор 17 ту же информацию представляет наводчику в звуковой форме (в наушники шлемофона). Через некоторое время (5-10 с) сигнал с реле времени подается на электромагнитный привод арретира, по которому он запитывается от бортсети танка и, срабатывая, снимает с арретира 11 стабилизатор линии прицеливания 8 и отключает с помощью электромагнитной муфты 2 от орудия 3 его ручной привод наведения 1. Стабилизатор 8 обеспечивает стабилизацию зеркала (зеркал) оптической формирующей системы 6, а электромагнитная муфта 2 - включение автоматизированного привода наведения 9 (в частности, его исполнительного двигателя), благодаря чему исключаются удары орудия 3 об упоры при его отключениях от ручного привода наведения 1.
Наводчик, наблюдая через оптическую формирующую систему поле боя, выбирает цель и, воздействуя с помощью пульта управления 7 на стабилизатор линии прицеливания 8, наводит на нее прицельную марку прицела. После этого производит выстрел (элементы АСУВ и орудия, обеспечивающие производство выстрела, на чертеже не показаны). Одновременно с перемещением прицельной марки перемещается и орудие по сигналам с выхода стабилизатора линии прицеливания 8, которые соответствуют угловым рассогласованиям между орудием 3 и СЛП 8 (это рассогласование измеряется СЛП 8 благодаря кинематической связи прицела 4 с орудием 3). При переносе огня с одной цели на другую, перезаряжении и производстве выстрелов различными типами снарядов предлагаемая система работает так же, как и система-прототип.
Для выключения предлагаемой АСУВ наводчику достаточно выключить блок включения 13. При этом отключается питание от электромагнитной муфты 2 и она обеспечивает отключение от оружия автоматизированного привода наведения 9 и подключение ручного привода наведения 1. Отключается питание от стабилизатора линии прицеливания 8, в связи с чем гироскоп (гироскопы) уменьшает(ют) скорость своего вращения и с электромагнитного привода арретира 14 (без задержки времени на блоке 15), благодаря чему арретир стопорит стабилизатор поля зрения 8, снимает сигналы с электромагнитной муфты 2 и индикатора 12, свидетельствующего о включении (или выключении) стабилизатора линии прицеливания 8 и переходе с ручного привода наведения орудия 1 на автоматизированный - 9 (или наоборот).
В случае невозможности включения блоков 2 и (или) 14 (например, из-за неисправной электрической цепи) предлагаемая система обеспечивает их работу как в известной системе, то есть при снятии стабилизатора линии прицеливания с арретира наводчик пользуется штатным ручным приводом арретира 10, а если необходимо отключить ручной привод наведения 1 от орудия 3, то пользуется штатным расцепляющим механизмом, имеющимся в ручном приводе наведения (см. прототип).
Таким образом, введение в автоматизированную систему управления вооружением реле времени, электромагнитного привода арретира, индикаторов и др., а также новых связей позволяет повысить быстродействие и надежность АСУВ в периоды переключения режимов работы, в периоды включения и выключения системы управления. Практические измерения, выполненные на известной системе, показывают, что на включение системы тратится от 130 до 150 с, а на ее выключение - от 10 до 55 с, то есть потери составляют 10-45 с. В предлагаемой системе этих потерь можно избежать. Помимо этого в предлагаемой системе улучшены эргономические условия работы наводчика. Вместо нескольких переключений в прототипе производится лишь одно (включение или выключение блока 13). Кроме того, наводчик освобожден от необходимости прикладывать значительные физические усилия, определять в уме временные интервалы, дотягиваться и протискиваться к далеко расположенным органам управления из-за возможности дистанционного включения всех элементов АСУВ.
Повышение эффективности функционирования АСУВ составило 10%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2005 |
|
RU2298759C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2006 |
|
RU2324134C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2004 |
|
RU2275581C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2003 |
|
RU2235270C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2002 |
|
RU2207488C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2002 |
|
RU2210715C1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ ОРУДИЯ УПРАВЛЯЕМЫМ СНАРЯДОМ | 2007 |
|
RU2338145C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2436030C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2009 |
|
RU2429439C2 |
| СПОСОБ УПРАВЛЕНИЯ СТРЕЛЬБОЙ ИЗ ОРУДИЯ УПРАВЛЯЕМЫМ СНАРЯДОМ ИЛИ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2007 |
|
RU2345310C1 |
Изобретение относится к автоматизированным системам управления вооружением. Технический результат - повышение эффективности функционирования. Система содержит пульт управления, орудие, ручной и автоматизированный приводы наведения орудия, прицел с первым индикатором, блоком включения автоматизированного наведения орудия и последовательно соединенными ручным приводом арретира, арретиром, стабилизатором линии прицеливания и оптической формирующей системой, а также соответствующие связи, обеспечивающие их совместную работу. Изобретение отличается тем, что введены второй и третий индикаторы, электромагнитная муфта, реле времени и электромагнитный привод арретира, а также связи, обеспечивающие соединение введенных и известных элементов между собой и их совместную работу. Введение в автоматизированную систему управления вооружением реле времени, электромагнитного привода арретира, индикаторов и др., а также новых связей позволяет повысить быстродействие и надежность системы в периоды переключения режимов работы, включения и выключения системы управления. Практические измерения, выполненные на известной и предложенной системах, показывают, что на включении и выключении систем экономится от 10 до 45 с. Кроме того, в предлагаемой системе улучшены эргономические условия работы наводчика, он освобожден от необходимости прикладывать значительные физические усилия, определять в уме временные интервалы, дотягиваться и протискиваться к далеко расположенным органам управления. Повышение эффективности функционирования составило 10%. 1 ил.
Автоматизированная система управления вооружением, содержащая пульт управления, ручной и автоматизированный приводы наведения орудия и кинематически связанный с орудием прицел с установленными в нем первым индикатором, блоком включения автоматизированного наведения орудия и последовательно соединенными ручным приводом арретира, арретиром, стабилизатором линии прицеливания и оптической формирующей системой, при этом второй выход арретира связан с первым индикатором, второй вход стабилизатора линии прицеливания соединен с выходом блока включения автоматизированного наведения орудия, третий - с выходом пульта управления, а второй выход - с автоматизированным приводом наведения орудия, отличающаяся тем, что она снабжена вторым и третьим индикаторами, реле времени, электромагнитным приводом арретира и электромагнитной муфтой, первый вход которой кинематически соединен с ручным приводом наведения орудия, второй и третий электрически соединены с выходами соответственно блока включения автоматизированного наведения орудия и арретира, первый выход кинематически соединен с орудием, а второй электрически соединен со вторым входом автоматизированного привода наведения орудия, вход реле времени подключен к выходу блока включения автоматизированного привода наведения, выход электромагнитного привода арретира соединен со вторым входом арретира, при этом вход второго индикатора соединен со вторым выходом реле времени, а выход оптически сопряжен с полем зрения оптической формирующей системы, вход третьего индикатора соединен с третьим выходом реле времени, а его выход подключен к наушникам шлемофона наводчика, ведущие элементы электромагнитной муфты установлены на выходном валу ручного привода наведения орудия, а ведомые через вал и закрепленную на нем шестерню постоянно соединены с зубчатым сектором орудия, корпус электромагнитного привода арретира установлен в прицеле, а якорь соединен с подвижной муфтой стопора арретира, при этом третий выход реле времени соединен со входом электромагнитного привода арретира.
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| - М.: Военное издательство, 1984, с.46-95 | |||
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2002 |
|
RU2207488C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| US 4326340 А, 27.04.1982 | |||
| СПОСОБ ЛЕЧЕНИЯ ДЕФОРМАЦИЙ ПРОКСИМАЛЬНОГО ОТДЕЛА БЕДРА | 2013 |
|
RU2528964C1 |

