Изобретение относится к способу по созданию физической нагрузки прогрессивно-регрессивного типа для тренировки мышц при воздействии пользователем на исполнительные механизмы устройств для тренировки мышц, вызывающих поступательно-возвратное перемещение подвижного элемента и собственной его массы.
Известен способ по созданию физической нагрузки в устройстве для тренировки мышц, заключающийся в выполнении, посредством воздействия исполнительного механизма на поворотный элемент с осью вращения, связанного с одним концом троса трособлочной системы, другой конец которого связан с перемещаемой массой пользователя, цикла движения, включающего первый такт - работа мышц пользователя при выполнении поступательного движения по подъему собственной массы пользователя, второй такт - работа мышц пользователя при осуществлении остановки движения, третий такт - работа мышц пользователя при выполнении возвратно-поступательного движения по опусканию массы пользователя до исходного положения, четвертый такт - работа мышц пользователя в осуществлении остановки движения при достижении исходного положения (патент РФ №2046617, кл. А 63 В 21/068, 27.10.95 - аналог и прототип).
Недостатком известного способа по созданию физической нагрузки является низкая эффективность тренировки и неудобство в пользовании использованного устройства.
Техническим результатом данного предложения является повышение эффективности тренировки путем использования изменения величины физической нагрузки в циклах выполняемых движений в устройствах для тренировки мышц, создающих качественно новое прогрессивное (увеличение) или регрессивное (уменьшение) воздействие физической нагрузки на мышцы пользователя, расширяя функциональные их возможности и обеспечивая удобство в пользовании.
Достигается это тем, что для реализации способа по созданию физической нагрузки прогрессивно-регрессивного типа используют пассивный исполнительный механизм, воспринимающий воздействие силы пользователя и обеспечивающий перемещение элемента и массы пользователя и увеличение использования длины рычага, вызывающих увеличение величины момента силы на каждом отрезке длины рычага при перемещении элемента и массы пользователя, при уменьшении воздействия силы на исполнительный механизм, осуществляется возвратно-поступательное перемещение элемента и массы пользователя и сокращение использования длины рычага, вызывающих уменьшение величины момента силы на каждом отрезке длины рычага при перемещении элемента и массы пользователя.
Также это достигается тем, что для реализации способа по созданию физической нагрузки прогрессивно-регрессивного типа используют активный исполнительный механизм, связанный общей осью с телом фигурного накопителя, воспринимающий воздействие силы пользователя и осуществляющий поворот общей оси и фигурного накопителя с телом, осуществляющий намотку на тело фала трособлочной системы и перемещение по рычагу элемента и массы пользователя, увеличивая использование длины рычага и вызывая увеличение величины момента силы на каждом отрезке длины рычага при перемещении элемента и массы пользователя, при уменьшении величины силы, прилагаемой к исполнительному механизму, осуществляется поворот общей оси и фигурного накопителя с телом в обратном направлении, вызывающий сматывание с тела фала трособлочной системы и приводящий к возвратно-поступательному перемещению по рычагу элемента и массы пользователя, сокращающих использование длины рычага и вызывающих уменьшение величины момента силы на каждом отрезке длины рычага при перемещении элемента и массы пользователя.
При этом цикл движения выполняется в двух направлениях, обеспечивая изменения величины воздействия физической нагрузки прогрессивного (увеличение) и регрессивного (уменьшение) характера (типа) на мышцы пользователя.
Сущность изобретения поясняется чертежами.
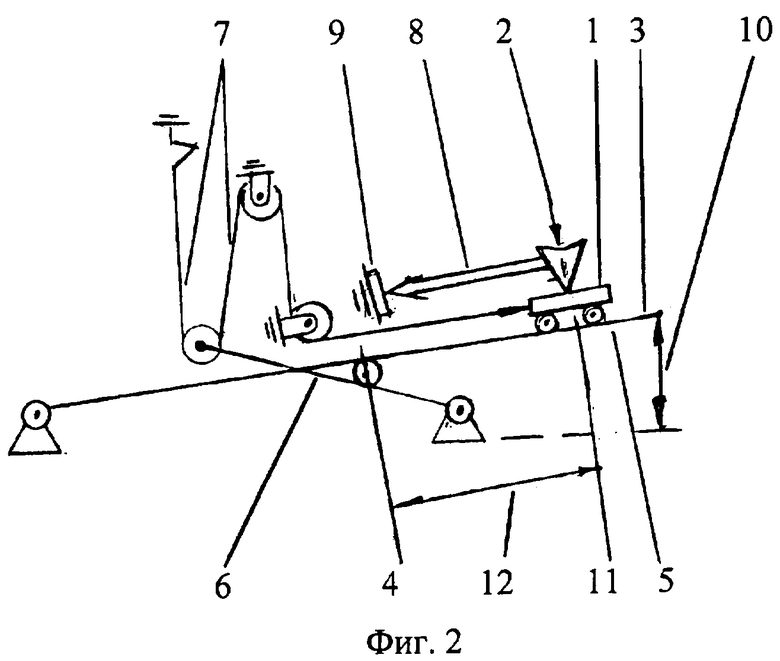
Фиг.1 - изображена кинематическая схема исходного расположения элемента 1 и массы 2 пользователя на рычаге 3 в точке 4 длины 5, которая служит точкой опоры и связью его с механизмом подъема 6 и трособлочной системы 7, осуществляющей взаимосвязь между всеми элементами в осуществлении сущности способа.
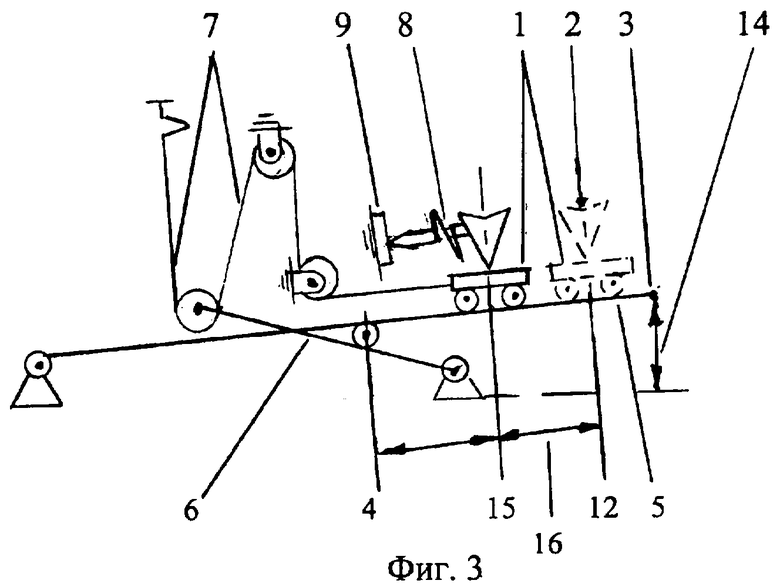
Фиг.2 - изображена кинематическая схема, поясняющая способ по созданию физической нагрузки прогрессивного типа, который реализуется при воздействии силы 8 пользователя на пассивный исполнительный механизм 9, вызывая изменения в трособлочной системе 7 и приводя в работу механизм подъема 6, поднимающий при этом рычаг 3 на высоту 10 и перемещающий элемент 1 и массу 2 пользователя до точки 11 на расстояние, равное 12 относительно длины 5 рычага 3, что приводит к увеличению момента силы, равного произведению расстояния 12 на массу 2.
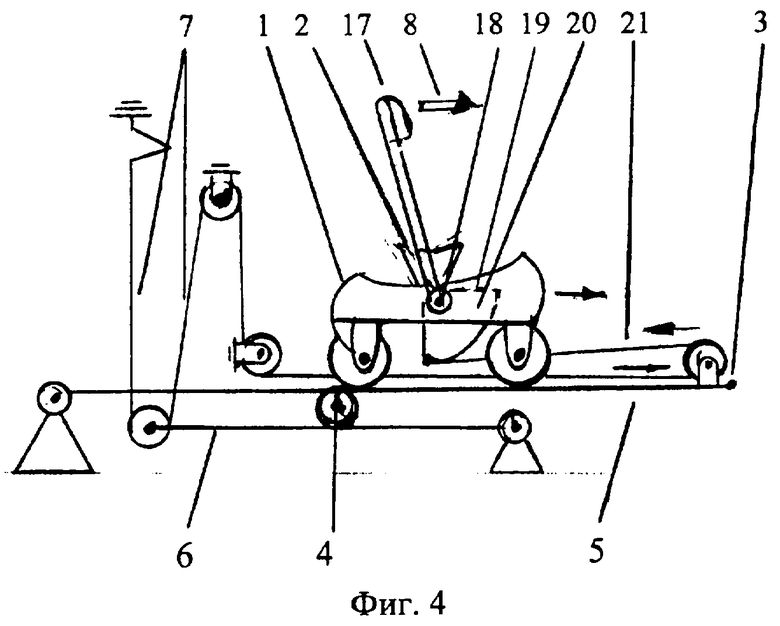
Фиг.3 - изображена кинематическая схема, поясняющая способ по созданию физической нагрузки регрессивного типа, который реализуется при уменьшении воздействия силы 8 пользователя на пассивной исполнительный механизм 9, вызывая изменения в трособлочной системе 7 и приводя в работу механизм подъема 6, опускающий при этом рычаг 3 на высоту 13 и перемещающий элемент 1 и массу 2 пользователя от точки 11 до точки 14 на расстояние, равное 15 относительно длины 5 рычага 3, что приводит к уменьшению момента силы, равного произведению расстояния 15 на массу 2.
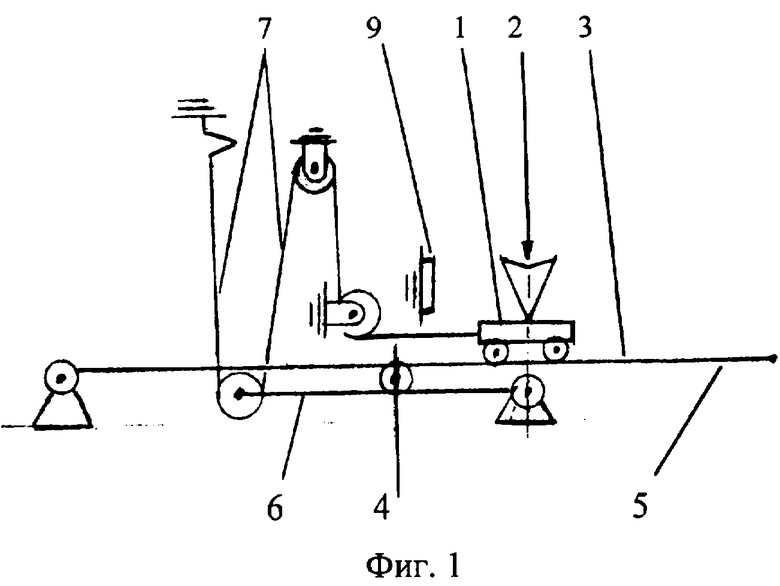
Фиг.4 - изображена кинематическая схема, поясняющая способ по созданию физической нагрузки прогрессивно-регрессивного типа при использовании активного исполнительного механизма 16, соединенного общей осью 17 с фигурным накопителем 18 с телом 19 и установленного на элементе 1, который реализуется в процессе воздействия силы 8, прилагаемой пользователем к активному исполнительному механизму 16, последний, воздействуя на общую ось 17, поворачивает фигурный накопитель 18, вызывая намотку трособлочной системы 7 на тело 19, что обеспечивает подъем механизма 6 и продольно-поступательное перемещение элемента 1 - далее схема работает аналогично описанной схеме на Фиг.2, при уменьшении величины прилагаемой пользователем силы 8 на исполнительный механизм 16 схема работает аналогично описанной схеме на Фиг. 3.
Способ по созданию физической нагрузки прогрессивно-регрессивного типа в устройствах для тренировки мышц осуществляется следующим образом.
В первом случае, для создания физической нагрузки прогрессивно-регрессивного типа используют пассивный исполнительный механизм 9, на который воздействует сила 8 пользователя, обеспечивающая перемещение элемента 1 и массы 2 пользователя по рычагу 3 на расстояние 12, вызывая изменения в трособлочной системе 7, что приводит в действие механизм подъема 6, поднимающий рычаг 3 на высоту 10. Перемещение по рычагу 3 элемента 1 и массы 2 пользователя приводит к увеличению момента силы на каждом отрезке длины рычага 3 их перемещения. Данную физическую нагрузку следует отнести к прогрессивному типу.
При уменьшении величины силы 8, прилагаемой пользователем на пассивный исполнительный механизм 9, вызывается возвратно-поступательное перемещение элемента 1 и массы 2 пользователя, кинематика схемы работает в обратной последовательности, при этом сокращается использование длины 12 рычага 3, что приводит к уменьшению момента силы на каждом отрезке длины рычага 3 их перемещения. Данную физическую нагрузку следует отнести к регрессивному типу.
Во втором случае, для создания физической нагрузки прогрессивно-регрессивного типа используют активный исполнительный механизм 16, связанный общей осью 17 с телом 20 фигурного накопителя 19. При воздействии силы 8 пользователя на исполнительный механизм 17 последний приводит к повороту оси 17 и тела 20, на которое при этом наматывается фал 21 трособлочной системы 7, приводящий к поступательному перемещению элемент 1 и массы 2 пользователя по рычагу 3, что вызывает увеличение момента силы на каждом отрезке длины рычага 3 их перемещения. Данную физическую нагрузку следует отнести к прогрессивному типу.
При уменьшении величины силы 8, прилагаемой пользователем на исполнительный механизм 16, последний приводит к повороту в обратном направлении оси 17 и тела 20, вызывая при этом сматывание с тела 20 фала 21 трособлочной системы 7, приводящее к возвратно-поступательному перемещению элемент 1 и массы 2 пользователя по рычагу 3, что вызывает уменьшение момента силы на каждом отрезке длины рычага 3 их перемещения. Данную физическую нагрузку следует отнести к регрессивному типу.
Таким образом, изобретение повышает эффективность тренировки.
Промышленная применимость.
Изобретение может быть использовано как способ по созданию физической нагрузки прогрессивно-регрессивного типа в устройствах для тренировки мышц.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПО СОЗДАНИЮ ФИЗИЧЕСКОЙ НАГРУЗКИ ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1998 |
|
RU2139747C1 |
| УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ ФИГУРНОГО ВОРОТА В УСТРОЙСТВАХ ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1998 |
|
RU2127141C1 |
| Способ по созданию силовой нагрузки в устройствах для тренировки мышц без блочно-тросовой системы | 2017 |
|
RU2664963C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ РУК | 2003 |
|
RU2239476C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1991 |
|
RU2046617C1 |
| Устройство силового привода тренажёра для тренировки мышц | 2021 |
|
RU2778862C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1992 |
|
RU2026699C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1996 |
|
RU2096058C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1995 |
|
RU2102094C1 |
| ТРЕНАЖЁР И СПОСОБ ВЫПОЛНЕНИЯ УПРАЖНЕНИЙ | 2017 |
|
RU2660300C1 |
Способ по созданию физической нагрузки прогрессивно-регрессивного типа в устройствах для тренировки мышц для повышения эффективности тренировки заключается в том, что используют пассивный исполнительный механизм, воспринимаюший воздействие силы пользователя и обеспечивающий перемещение элемента и массы пользователя и увеличение использования длины рычага. 2 с.п. ф-лы, 4 ил.
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1991 |
|
RU2046617C1 |
| БУРОВАЯ КОРОНКА | 2008 |
|
RU2367764C1 |
| US 6554751 B1, 29.04.2003 | |||
| СПОСОБ ИЗМЕРЕНИЯ КЛЕТОЧНОГО СОСТАВА СИНОВИАЛЬНОЙ ЖИДКОСТИ В ОБРАЗЦАХ С ПРИМЕСЬЮ КРОВИ | 2023 |
|
RU2821276C1 |
| DE 10161472 A1, 06.02.2003. | |||

