Изобретение относится к ракетной технике, а именно к системам старта и ориентации ракеты, и может найти преимущественное применение в малогабаритных ракетах типа земля-воздух и воздух-воздух.
Любая система старта и ориентации ракеты включает в себя электронные блоки управления и питания и исполнительную систему, представляющую собой комплекс определенных средств, приводящих ракету в нужное состояние под управлением электронных блоков. Изобретение касается именно исполнительной системы и направлено на ее усовершенствование.
Известна исполнительная система старта и ориентации ракеты [1] включающая в себя, как и изобретение, стартовые средства, аэродинамические рули с приводом и средства ориентации, выполненные на основе газогенератора и соединенных с ним реактивных сопел.
В этой системе осуществляется подвод горячих газов от газогенератора, размещенного в корпусе ракеты, через оси вращения рулей к реактивным соплам, расположенным в районе задней кромки рулей и формирующим реактивные струи, направленные параллельно плоскости рулей. В мире накопился значительный парк ракет с наклонным стартом, требующих модернизации, поскольку они не позволяют организовать круговую оборону (не позволяют перехватывать цель, внезапно появившуюся с любой стороны от обороняемого объекта). Модернизировать ракету с наклонным стартом теоретическим можно путем оснащения ее рассмотренной известной исполнительной системой. Однако это сопряжено со столь значительными конструктивными изменениями, что делает подобную модернизацию экономически нецелесообразной. Кроме того, в рассмотренной исполнительной системе старта и ориентации не используется полностью энергия реактивной струи, истекающей параллельно плоскости рулей, что отрицательно сказывается на скорости выполнения маневра по развороту ракеты на цель.
Известна исполнительная система старта и ориентации ракеты [2] включающая в себя, как и изобретение, стартовые средства, аэродинамические рули с приводом и средства ориентации, выполненные на основе газогенератора, соединенного с реактивными соплами. Так же, как и в частных случаях воплощения изобретения, в данной системе газогенератор соединен посредством питающих каналов-газоводов с парами реактивных сопел; каждая пара образована двумя противоположно направленными идентичными соплами, приемные отверстия которых обращены к выходному отверстию их общего канала-газовода и диаметры которых равны диаметру этого выходного отверстия канала-газовода.
Данная система обеспечивает возможность быстрого разворота ракеты на цель благодаря истечению реактивных струй из каждой пары сопел перпендикулярно плоскостям рулей.
Однако ей так же, как и ранее рассмотренной исполнительной системе, присуще исполнение средств ориентации в виде единого комплекса с приводом рулей, что трудно воплотить в конструкциях малогабаритных ракет без ухудшения их аэродинамических свойств и исключает организацию сброса пассивной массы средств ориентации после разворота ракеты в заданном направлении. Данную систему также нецелесообразно использовать для вышеописанной модернизации ракет с наклонным стартом.
Наиболее близкой к изобретению является исполнительная система старта и ориентации ракеты [3] также включающая в себя стартовые средства, аэродинамические рули с приводом и средства ориентации, предназначенные для размещения в хвостовой части ракеты и выполненные на основе газогенераторов, соединенных с реактивными соплами.
Данной системой можно дополнить ракету с наклонным стартом (в целях вышеуказанной модернизации) без существенной переделки конструкции последней. В данной системе предусмотрен сброс пассивной массы отработавших средств ориентации. Однако конструктивная сложность, громоздкость средств ориентации, рассчитанных исключительно на использование высокотоксичного жидкого моно-топлива (гидразина), в этой известной системе осложняет ее применимость. Несовершенство геометрии средств ориентации вынудило создателей этой системы предусматривать обязательный сброс средств ориентации с ракеты сразу после ее разворота на цель, причем этот сброс может осуществляться только непосредственно перед запуском маршевых двигателей, т.е. над стартовой площадкой, что создает сложность выполнения боевых действий и опасность для обороняемого объекта.
Ни одна из вышерассмотренных исполнительных систем старта и ориентации ракеты не позволяет обеспечивать перехват ближней цели в затрудненных условиях вертикального старта, например, с площадки, расположенный в окружении лесного массива. Это прежде всего связано с исполнением стартовых средств в этих системах, которые не позволяют быстро достичь высоты порядка 40 м, необходимой для безопасного осуществления маневра по нацеливанию ракеты и включению маршевого двигателя.
Целью изобретения создание универсальной исполнительной системы старта и ориентации ракеты, равно воплотимой и в крупногабаритных, и в малогабаритных ракетах, исключающей сброс пассивной массы отработавших средств ориентации на стартовую площадку, причем создание такой исполнительной системы, которая позволила бы с минимальными затратами оснастить ею практически любую ракету с наклонным стартом из числа ранее созданных и даже изготовленных и тем самым придать последней все качества перспективной ракеты круговой обороны.
Для достижения цели исполнительная система старта и ориентации ракеты, включающая в себя стартовые средства, аэродинамические рули с приводом и средства ориентации, предназначенные для размещения в хвостовой части ракеты и выполненные на основе по меньшей мере одного газогенератора и соединенных с ним реактивных сопел, согласно изобретению, снабжена кольцевым корпусом, который предназначен для жесткой связи с корпусом ракеты, средства ориентации размещены в кольцевом корпусе, причем внутренняя поверхность кольцевого корпуса выполнена конусообразной и покрыта теплоизоляционным материалом с образованием газовода-сопла, проточный профиль которого является продолжением профиля сопла маршевого двигателя ракеты.
Кольцевой корпус может быть выполнен с возможностью его отделения от ракеты в полете, что позволяет оптимизировать энергозатраты и сбросить полностью пассивную массу отработавших средств ориентации в заданный момент времени вне зоны стартовой площадки.
Реактивные сопла средств ориентации рекомендуется располагать по меньшей мере в одной плоскости, перпендикулярной продольной оси газовода-сопла. Тем самым обеспечивается полноценное использование энергии реактивных струй при ориентации ракеты и, как следствие, перехват цели в непосредственной близости от стартовой площадки.
Стартовые средства рекомендуется выполнить в виде пускового контейнера с передней и задней крышками, полость которого цилиндрическая и предназначена для размещения в ней ракеты, порохового аккумулятора давления, размещенного в донной части контейнера, закрытой задней крышкой, и защитной заглушки с конусообразной боковой поверхностью, профиль которой повторяет профиль по меньшей мере части поверхности газовода-сопла кольцевого корпуса, причем в хвостовой части кольцевого корпуса при этом необходимо выполнить поршневой буртик, диаметр которого равен диаметру полости контейнера, а в контейнере выполнить опору с разрывными элементами, предназначенными для крепления кольцевого корпуса над аккумулятором давления. Такое дальнейшее развитие изобретения позволяет организовать старт ракеты из пускового контейнера с помощью порохового аккумулятора давления, благодаря чему создается возможность перехватить цель, внезапно появившуюся в непосредственной близости от стартовой площадки, расположенной в крайне неудобных условиях (например, находящейся в окружении лесного массива либо на палубе корабля с высокими надстройками).
При этом оптимальной является выпукло-вогнутая форма защитной заглушки, причем выпуклость должна быть обращена в сторону ее наименьшего диаметра. Данное исполнение защитной заглушки позволяет, как это будет показано ниже, обеспечить максимальную надежность и эффективность ее работы в составе исполнительной системы.
В пусковом контейнере в зоне крепления кольцевого корпуса может быть выполнена проточка, размеры которой выбираются с учетом заданной пропускной способности зазора, образованного ею относительно поршневого буртика кольцевого корпуса; при этом передняя крышка контейнера должна быть выполнена с обеспечением ее разрыва при заданном давлении в полости контейнера. Данное сочетание признаков обеспечивает, как будет показано ниже, своевременное самоудаление передней крышки с пускового контейнера с минимумом энергозатрат непосредственно перед пуском ракеты.
В первом частном случае конкретного выполнения исполнительная система старта и ориентации ракеты может быть снабжена тягами, закрепленными на кольцевом корпусе; при этом газогенератор выполняется кольцевым и соединяется с реактивными соплами посредством питающих каналов-газоводов, выполненных в кольцевом корпусе, а реактивные сопла выполняются идентичными, попарно лежащими в одной плоскости, причем реактивные сопла каждой пары противоположно направлены и связаны с одним концом соответствующей тяги с обеспечением возможности распределения газового потока между ними от их общего канала-газовода кольцевого корпуса, а каждая тяга своим вторым концом связана с соответствующим рулем с возможностью их совместного поворота. В этом случае конкретного исполнения организована работа аэродинамических рулей и средств ориентации от единого привода.
Изобретением предусмотрены два возможных варианта первого частного случая конкретного выполнения исполнительной системы старта и ориентации ракеты. По первому варианту исполнительная система снабжена термостойкими кольцевыми втулками, каждая из которых размещена в выходном патрубке соответствующего канала-газовода с возможностью продольного перемещения в нем, каждая тяга закреплена на кольцевом корпусе в средней своей части посредством оси вращения с обеспечением возможности скольжения первого ее конца по кольцевому корпусу, каждая пара реактивных сопел выполнена в первом конце каждой тяги в виде коленообразных каналов с конусообразными выходным раструбами и с приемными отверстиями, которые обращены к выходному отверстию их общего канала-газовода и диаметры которых равны внутренним диаметрам термостойких кольцевых втулок, причем контактирующие поверхности первого конца каждой тяги и кольцевого корпуса теплоизолированы.
По второму варианту первого частного случая конкретного выполнения исполнительной системы старта и ориентации ракеты предусмотрено, что каждая пара реактивных сопел выполнена в кольцевом корпусе в виде единого сквозного прямолинейного канала с конусообразными выходными раструбами, в кольцевом корпусе выполнены глухие радиальные отверстия, ось каждого из которых, с одной стороны, проходит через центр соответствующего прямолинейного канала, перпендикулярна оси последнего и лежит с ней в одной плоскости, с другой стороны, перпендикулярна оси выходного патрубка соответствующего общего канала-газовода и лежит с ней во второй плоскости и, с третьей стороны, лежит на пересечении первой и второй плоскостей, каждая тяга закреплена на кольцевом корпусе своим первым концом посредством стержня, покрытого слоем термостойкого композиционного материала и размещенного с возможностью вращения в соответствующем глухом радиальном отверстии, покрытом теплоизоляционным слоем, причем в слое композиционного материала каждого стержня выполнена проточка с обеспечением возможности распределения газового потока между реактивными соплами пары.
Эти оба варианта первого частного случая выполнения исполнительной системы старта и ориентации ракеты компактны, равно технологичны и характеризуются высокой надежностью работы средств ориентации от привода аэродинамических рулей.
Во втором частном случае конкретного выполнения исполнительной системы старта и ориентации ракеты рекомендуется средства ориентации выполнять в виде импульсных твердотопливных реактивных двигателей, размещенных в кольцевом корпусе равномерными рядами по его высоте с ориентацией каждого сопла импульсного двигателя перпендикулярно продольной оси газовода-сопла кольцевого корпуса, причем по меньшей мере каждый ряд образован импульсными двигателями одного типоразмера. Этот частный случай конкретного выполнения характеризуется простотой сборки средств ориентации в кольцевом корпусе, позволяет обеспечить независимость работы аэродинамических рулей и средств ориентации, обеспечивает реактивное управление по тангажу и курсу.
Во втором частном случае конкретного выполнения исполнительной системы старта и ориентации ракеты рекомендуется по меньшей мере у импульсных двигателей наименьшей мощности, образующих один ряд, оси выходных раструбов сопел направить по касательным к кольцевому корпусу. Благодаря этому обеспечивается возможность осуществления реактивного управления ракетой по крену.
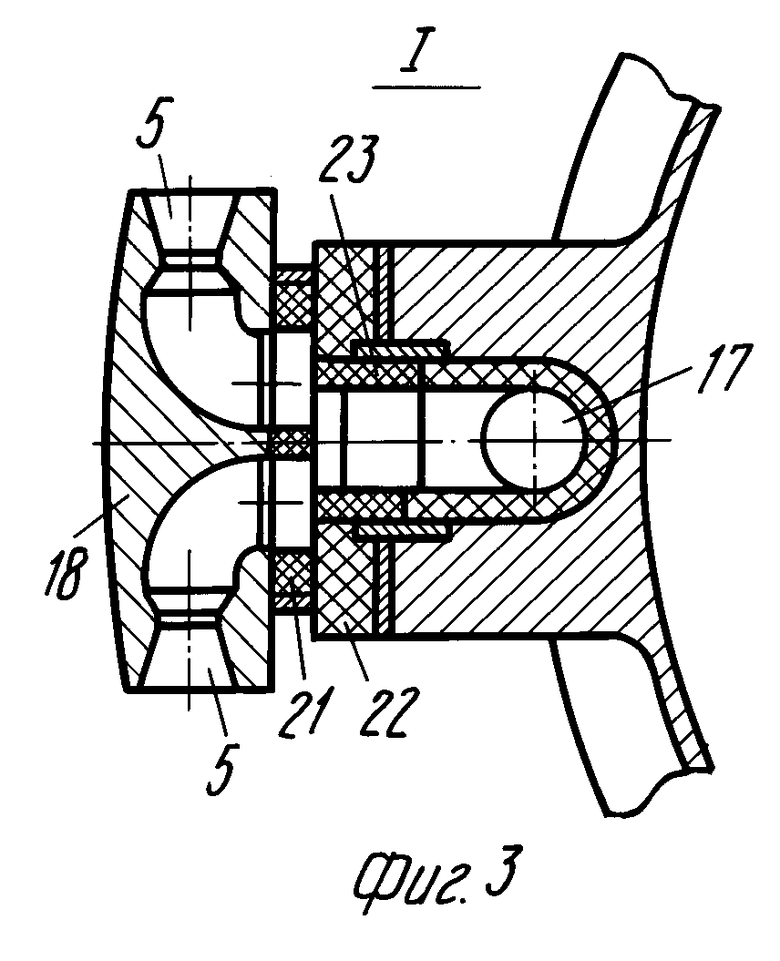
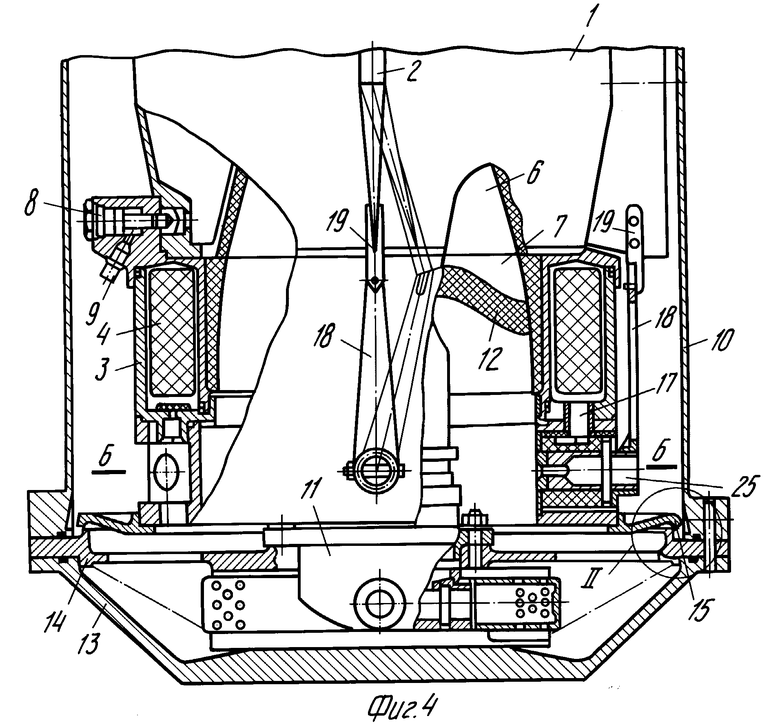
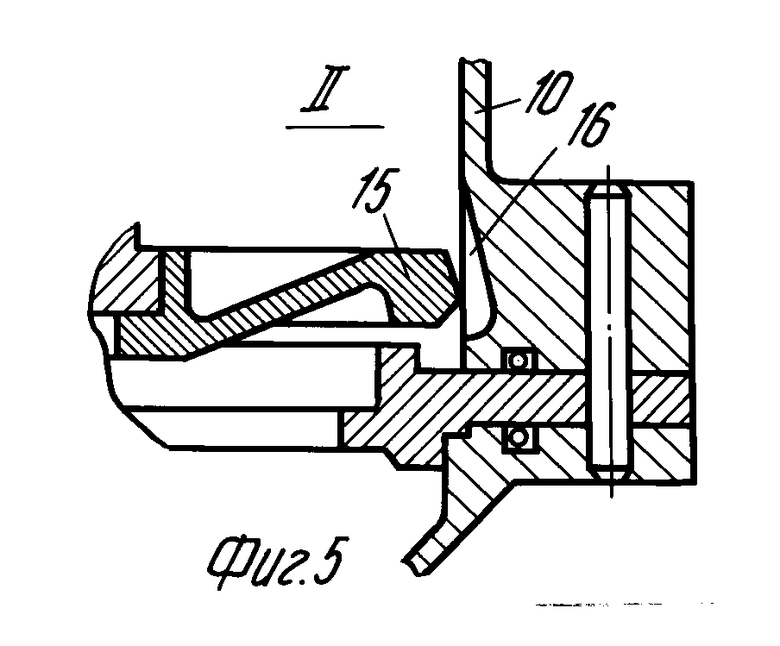
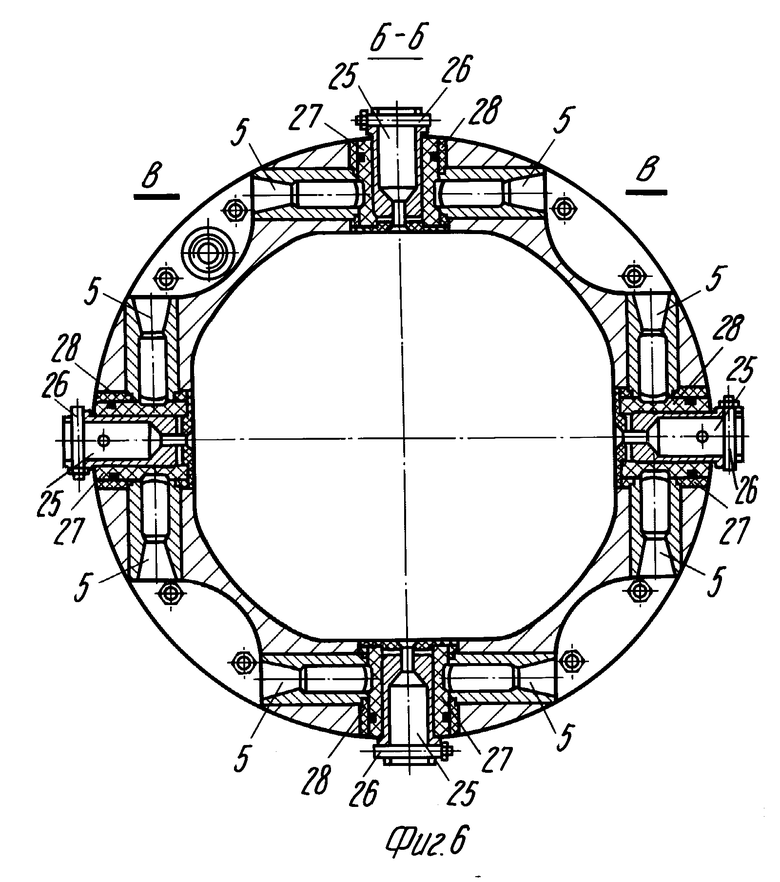
На фиг.1 представлена исполнительная система старта и ориентации ракеты, иллюстрирующая первый вариант первого частного случая выполнения, вид сбоку; на фиг.2 сечение А-А на фиг.1; на фиг.3 узел I на фиг.2; на фиг.4 в частичном разрезе исполнительная система, иллюстрирующая второй вариант первого частного случая выполнения, вид сбоку; на фиг.5 узел II на фиг.4; на фиг.6 разрез Б-Б на фиг.4; на фиг.8 разрез В-В на фиг.6; на фиг.8 - исполнительная система, иллюстрирующая второй частный случай выполнения, вид сбоку.
Исполнительная система старта и ориентации ракеты 1 (фиг.1) включает в себя аэродинамические рули 2 с приводом (на чертежах условно не показан), традиционно расположенным внутри ракеты, кольцевой корпус 3 и стартовые средства (на фиг.1 условно не показаны). В теле кольцевого корпуса 3 размещены средства ориентации, выполненные на основе по меньшей мере одного газогенератора 4 и соединенных с ним реактивных сопел 5, которые выходят на внешнюю поверхность кольцевого корпуса 3 (фиг.2 и 3). Кольцевой корпус жестко связывают с хвостовой частью ракеты 1. Внутри корпуса ракеты 1 находится маршевый двигатель, с соплом 6 которого соосен кольцевой корпус 3. Внутренняя поверхность кольцевого корпуса 3, выполненная конусообразной и покрытая теплоизоляционным, например, углеродсодержащим композиционным материалом, образует газовод-сопло 7, проточный профиль которого является продолжением профиля сопла 6 маршевого двигателя ракеты (фиг.4).
Кольцевой корпус 3 выполнен с возможностью отделения его от ракеты 1 в полете, поскольку он закреплен на корпусе ракеты 1 с помощью разрывных болтов 8 с пиротолкателями 9 (фиг.4).
В состав стартовых средств входят пусковой контейнер 10, пороховой аккумулятор 11 давления и защитная заглушка 12 (фиг.4). Пусковой контейнер 10 снабжен передней и задней крышками, а полость его выполнена цилиндрической и с размерами, позволяющими разместить в ней ракету 1 со сложенными рулями 2 (верхняя часть контейнера с передней крышкой на чертежах условно не показана). Пороховой аккумулятор 11 давления размещен в донной части пускового контейнера 10, закрытой съемной задней крышкой 13. В донной части контейнера 10 имеется опора 14, предназначенная для крепления кольцевого корпуса 3 в сборе с ракетой 1 над аккумулятором 11. Крепление кольцевого корпуса 1 на опоре 14 осуществляется разрывными элементами, например разрывными болтами. Для обеспечения возможности скольжения кольцевого корпуса 3 по направляющей цилиндрической поверхности полости контейнера 10 кольцевой корпус 3 в хвостовой части имеет поршневой буртик 15, диаметр которого равен диаметру полости контейнера 10. Защитная заглушка 12, предназначенная для плотной посадки (как пробки) в газоводе-сопле 7 кольцевого корпуса 3, выполняется выпукло-вогнутой формы и с конусообразной боковой поверхностью, профиль которой повторяет профиль по меньшей мере части поверхности газовода-сопла 7. Выпуклость заглушки 12 обращена в сторону ее наименьшего диаметра. Заглушка 12 может быть металлической или выполняться из теплозащитного композиционного материала, например, на основе эпоксидной смолы с графитовым наполнителем.
В пусковом контейнере 10 в зоне крепления кольцевого корпуса 3 напротив поршневого буртика 15 выполнена проточка 16 (фиг.5). Размеры проточки 16 выбраны, исходя из заданной пропускной способности зазора, образованного проточкой 16 относительно поршневого буртика 15, при этом передняя крышка контейнера 10 выполняется саморазрушающейся при заданном давлении на нее изнутри, для чего ее изготавливают из хрупкого полимера, например из пенополиуретана, со строго фиксированной толщиной и герметично закрепляют на контейнере 10.
Возможны два частных случая конкретного выполнения этой исполнительной системы старта и ориентации ракеты. Каждому частному случаю присущи своя конструкция кольцевого корпуса 10 и свой режим работы средств ориентации. В первом частном случае реактивные сопла 5 средств ориентации расположены в одной плоскости, перпендикулярной продольной оси газовода-сопла 7 кольцевого корпуса 3 (фиг. 1-4, 6 и 7), а во втором частном случае в нескольких таких плоскостях (фиг.8). Но в обоих случаях, как станет ясно из нижеизложенного, обеспечивается ориентации ракеты 1 по тангажу, курсу и крену.
Первый частный случай конкретного выполнения исполнительной системы предполагает в свою очередь два возможных варианта. Первый вариант иллюстрируется чертежами, приведенными на фиг.1-3, а второй вариант - чертежами, приведенными на фиг.4, 6 и 7. Обоим вариантам первого частного случая присуще кольцевое исполнение газогенератора 4 (например, твердотопливного), находящегося в теле кольцевого корпуса 3, в котором выполнены питающие каналы-газоводы 17, соединяющие газогенератор 4 с реактивными соплами 5 (фиг.1 и 4). Реактивные сопла 5 идентичны и сгруппированы в пары, лежащие в одной плоскости; к каждой паре подведен свой канал-газовод 17 (фиг.2 и 6). Реактивные сопла 5 каждой пары противоположно направлены по отношению друг к другу и связаны с одним концом соответствующей тяги 18. Число тяг 18 равно числу рулей 2, которых может быть, например, четыре. Каждая тяга 18 закреплена на кольцевом корпусе 1 и вторым своим концом связана со своим рулем 2 посредством V-образной вилки 19 (фиг.1 и 4), шарнирно закрепленной на тяге 18, охватывающей заднюю кромку руля 2 и прижатой к рулю 2 пружиной (последняя на чертежах условно не показана). Пружина обеспечивает безлюфтовое взаимодействие пары вилка 19 руль 2. Как будет показано ниже, тем самым обеспечивается возможность совместного поворота тяг 18 с рулями 2, приводящего к требуемому распределению газового потока, постоянно истекающего из каждого канала-газовода 17 в каждую пару реактивных сопел 5.
По первому варианту первого частного случая конкретного выполнения исполнительной системы тяги 18 закреплены в средней своей части на кольцевом корпусе 3 посредством осей вращения 20 (фиг.1). Каждая тяга 18 соприкасается с кольцевым корпусом 3 своим первым концом, непосредственно в теле которого выполнена пара реактивных сопел 5 в виде коленообразных каналов с соосными конусообразными выходными раструбами, обращенными в противоположные стороны (фиг.3). Приемные отверстия этих коленообразных каналов обращены к выходному отверстию их общего канала-газовода 17; в районе этих отверстий кольцевой корпус 3 и контактирующий с ним с возможностью скольжения конец тяги 18 теплоизолированы накладками 21 и 22, выполненными, например, из композиционного материала с графитовым наполнителем. Накладки 21 и 22 необходимы для предотвращения эрозии контактирующих поверхностей от агрессивного воздействия горячего газа, попадающего в зазоры скользящей пары тяга 18 кольцевой корпус 3. Накладки 21 и 22 надежно выполняют эту защитную функцию только в сочетании с термостойкими кольцевыми втулками 23, которые можно изготовить из того же композиционного материала. Каждая втулка 23 размещена в выходном патрубке соответствующего канала-газовода 17 с возможностью продольного перемещения в нем, т. е. наружный диаметр втулки 23 практически равен диаметру выходного патрубка канала-газовода 17. Внутренний же диаметр втулки 23 должен быть равен диаметрам приемных отверстий коленообразных каналов реактивных сопел 5; в противном случае, как станет ясно из нижеизложенного, не обеспечивается требуемый принцип работы этого узла.
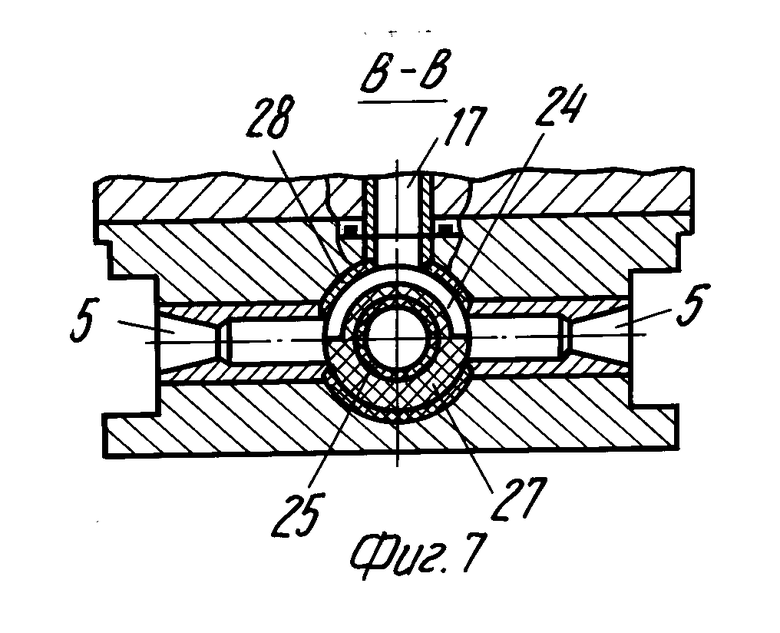
По второму варианту первого частного случая исполнительной системы организованы поворотные краны-втулки, управляющие поступлением газа в неподвижные пары реактивных сопел 5, выполненные, как показано на фиг.6 и 7, непосредственно в теле кольцевого корпуса 3 в виде единых сквозных прямолинейных каналов с противоположно направленными конусообразными выходными раструбами. Поворотные краны-втулки организованы следующим образом. Для этого в кольцевом корпусе 3 выполнены глухие радиальные отверстия 24 (фиг.7), ось каждого из которых: с одной стороны, проходит через центр соответствующего прямолинейного канала реактивных сопел 5, перпендикулярна оси этого прямолинейного канала и лежит с ней в одной плоскости, с другой стороны, перпендикулярна оси выходного патрубка соответствующего канала-газовода 17 и лежит с ней во второй плоскости; с третьей стороны, лежит на пересечении этих первой и второй плоскостей. В каждом таком радиальном отверстии 24 установлен с возможностью вращения стержень 25, жестко связанный посредством, например, болта 26 (фиг.6) с первым концом тяги 18 (фиг.4). Каждый стержень 25 и контактирующая с ним поверхность глухого радиального отверстия 24 в кольцевом корпусе 3 покрыты теплоизоляционными слоями 27 и 28 из вышеупомянутого композиционного материала. Функциональная предназначенность теплоизоляционных слоев 27 и 28 та же, что и у накладок 21 и 22 по первому варианту первого частного случая предотвращение повреждения контактирующих поверхностей подвижной пары деталей. В слое 27 композиционного материала, нанесенного на стержень 25, выполнена проточка, размеры которой и обуславливают возможность распределения газового потока от канала-газовода 17 между реактивными соплами 5 каждой пары. Размеры проточки выбираются с тем расчетом, чтобы при вращении стержня 24 обеспечивалось плавное изменение от одного крайнего положения - когда газ может поступать из общего канала-газовода 17 только к одному из реактивных сопел 5, ко второму крайнему положению -когда газ поступает равными потоками к обоим соплам 5 пары; при этом должна быть исключена возможность одновременного перекрытия обоих сопел 5 пары. Глубина этой проточки в слое 27 регламентируется минимальной толщиной этого теплоизоляционного слоя, необходимой для защиты стержня 25.
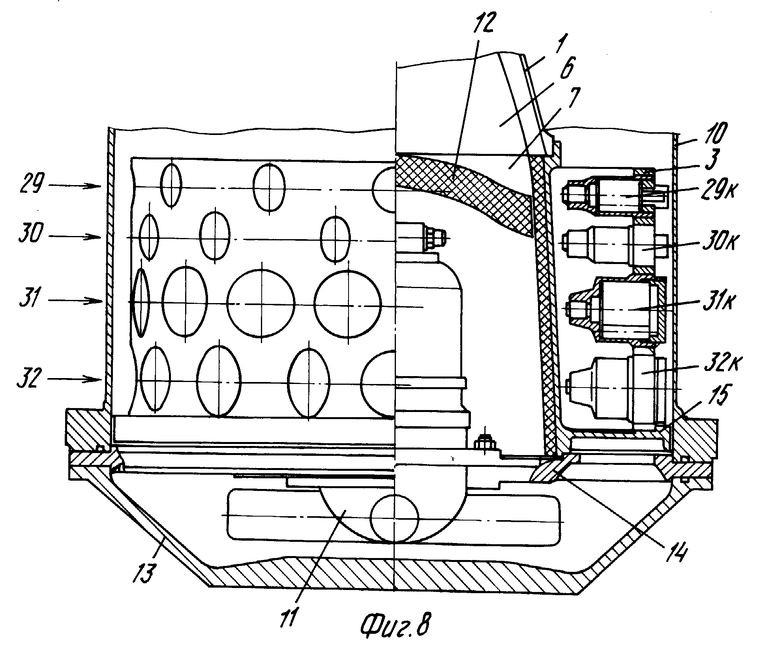
Вторым частным случаем конкретного выполнения исполнительной системы для управления ракетой согласно фиг. 8 предусмотрено использование в качестве средств ориентации готовых покупных изделий импульсных твердотопливных реактивных двигателей известной конструкции. Большое количество таких импульсных двигателей (например, несколько десятков) размещено по периферии кольцевого корпуса 3 равномерными рядами 29-32 по его высоте. Каждый импульсный двигатель 29к 32к закреплен в своем гнезде кольцевого корпуса 3 с ориентацией его сопла перпендикулярно продольной оси газовода-сопла 7. По меньшей мере каждый ряд 29-32 образован идентичными импульсными двигателями, т.е. двигателями одного типоразмера, хотя возможно и идентичное исполнение всех импульсных двигателей. Как будет показано ниже, такое использование стандартных импульсных двигателей обеспечивает склонение ракеты 1 только по тангажу и курсу.
Чтобы достичь возможности управления ракетой 1 и по крену, потребуется незначительная модернизация реактивных сопел у стандартных импульсных двигателей: необходимо выходные раструбы этих сопел развернуть так, чтобы их оси оказались направленными по касательным к кольцевому корпусу 3. Такой разворот выходных раструбов необходимо выполнить по меньшей мере у импульсных двигателей наименьшей мощности, образующих один ряд, например ряд 29; очевидно, что при этом у одной половины импульсных двигателей ряда 29 выходные раструбы реактивных сопел должны быть развернуты в одну сторону (например, по часовой стрелке вокруг оси газовода-сопла 7), а у второй половины в другую сторону (против часовой стрелки). Но возможно, с достижением того же результата, который будет рассмотрен ниже, данный разворот выходных раструбов выполнить по часовой стрелке у всех импульсных двигателей, например, ряда 29, а против часовой стрелки у всех импульсных двигателей ряда 30; причем в этом случае ряды 29 и 30 должны состоять из однотипных импульсных двигателей. Использовать для управления креном именно самые маломощные импульсные двигатели из общего числа, которыми укомплектован кольцевой корпус 3, целесообразно по той причине, что для манипулирования креном ракеты 1 не требуется создавать такие большие реактивные силы, которые необходимы для склонения ракеты по тангажу и курсу.
Исполнительная система старта и ориентации ракеты работает следующим образом.
Ракета 1, например, типа земля-воздух с кольцевым корпусом 3, выполненным либо в соответствии с фиг.1 (фиг.2 и 3), либо в соответствии с фиг.4 (фиг. 6 и 7), либо в соответствии с фиг.8, помещается в вертикально установленный пусковой контейнер 10 с демонтированной его задней крышкой 13 (фиг.4 и 8). В этот момент ракета 1 находится в транспортировочном состоянии (т. е. со сложенными рулями 2), а защитная заглушка 12 плотно вставлена в газовод-сопло 17 кольцевого корпуса 3. Кольцевой корпус 3 связывают с опорой 14 разрывными болтами, после чего устанавливают на контейнер 10 его заднюю крышку 13 с пороховым аккумулятором 11 давления, а сверху контейнер 10 герметично закрывают передней крышкой. Теперь исполнительная система собрана и готова к работе.
Пороховые газы, образующиеся при воспламенении заряда порохового аккумулятора 11, создают в донной части контейнера 10 повышенное давление, воздействующее на торец хвостовой части кольцевого корпуса 3. Заглушка 12 при этом еще плотнее вгоняется в газовод-сопло 17, защищая маршевый двигатель ракеты от воздействия горячих пороховых газов и тем самым предотвращая опасность самопроизвольного включения маршевого двигателя. Часть пороховых газов перетекает по зазору, образованному проточкой 16 (фиг.5) в верхнюю герметичную полость контейнера 10. Как только давление под передней крышкой контейнера 10 достигнет заданного критического уровня, произойдет хрупкое разрушение передней крышки с выбросом осколков наружу. После того, когда давление в замкнутом пространстве в донной части контейнера 10 достигнет требуемой величины, происходит разрыв болтов, удерживавших ракету на опоре 14, и ракета, скользя поршневым буртиком 15 вдоль направляющей цилиндрической поверхности контейнера 10, устремляется вверх и выбрасывается на требуемую безопасную высоту (которая может достигать 40 м), необходимую для выполнения маневра по ориентации ракеты и включения маршевого двигателя в затрудненных условиях старта.
После достижения требуемой высоты или, если это возможно, на восходящем участке траектории ракеты начинается выполнение маневра по ее ориентации, т. е. управление ракетой по тангажу, курсу и крену. Выполнение этого маневра осуществляется различным образом в зависимости от выполнения конструкции кольцевого корпуса 3, оснащенного средствами ориентации.
По первому варианту первого частного случая выполнения (фиг.1-3) после включения с помощью электронного блока ракеты кольцевого газогенератора 4 поток горячих газов поступает одновременно по всем каналам-газоводам 17, плотно прижимает кольцевые втулки 23 к первым концам тяг 18 (тем самым втулки 23 "герметизируют" зазоры подвижного соединения) и истекает из реактивных сопел 5, создавая реактивные силы, направленные по касательной к кольцевому корпусу 3 в плоскости, перпендикулярной его оси, т.е. в плоскости, перпендикулярной оси ракеты 1. Регулировка этих реактивных сил осуществляется одновременно с регулировкой аэродинамических сил с помощью единого привода, управляющего поворотом рулей 2, кинематически связанных V-образными вилками 19 с тягами 18, поворачивающимися благодаря осям 20. В нейтральном положении рулей 2, которое показано на фиг.1, газ поступает во все сопла всех пар реактивных сопел 5 в равных количествах и результирующая реактивных сил равна нулю (фиг.3). При отклонении руля 2 на максимально возможный угол (25-30o) в ту или иную сторону, тяга 18 отклонится примерно на 10o и весь газовый поток от канала-газовода 17 будет поступать только в одно из реактивных сопел 5 соответствующей пары. Таким образом, угловая позиция руля 2 управляет угловой позицией соответствующей тяги 18, а строго пропорционально угловому положению тяги 18 происходит распределение газового потока между реактивными соплами 5 соответствующей пары и создаются реактивные силы того же знака, что и на аэродинамических плоскостях руля 2, обеспечивающие возможность управления ракеты по тангажу, курсу и крену.
По второму варианту первого частного случая выполнения кольцевого корпуса 3 (фиг.4, 6 и 7) принцип создания управляющих реактивных сил аналогичен вышерассмотренному. Различия же лишь в том, что по второму варианту рабочее отклонение тяги 18, отслеживающее отклонение руля 2, вызывает поворот крана-втулки, выполненной в виде стержня 25 со слоем композиционного материала 27 вышеописанной конфигурации (фиг.7). Положение крана-втулки и будет определять количество газа, поступающего в каждое из реактивных сопел 5 пары, а значит и величину результирующей реактивных сил в паре сопел.
По второму частному случаю выполнения кольцевого корпуса 3 (фиг.8) принцип создания реактивных сил, управляющих склонением ракеты 1, несколько отличен от вышеописанного. Склонение ракеты 1 здесь уже осуществляется без участия аэродинамических рулей 2 путем включения в заданный момент времени тех или иных импульсных реактивных двигателей, управляемых, например, непосредственно счетно-решающим устройством электронного блока ракеты. Склонение ракеты по тангажу и курсу обеспечивается включением наиболее мощных импульсных двигателей рядов 31 и 32, сопла которых формируют радиально направленные реактивные силы. Управление же креном ракеты обеспечивается маломощными импульсными двигателями рядов 29 и 30, сопла которых формируют реактивные силы по касательным к кольцевому корпусу 3.
После завершения маневра по ориентации ракеты в направление цели запускают маршевый двигатель ракеты. Пороховые газы, образующиеся при работе маршевого двигателя, легко вышибают защитную заглушку 12 (фиг.1, 4 и 8) и после этого свободно истекают через газовод-сопло 17 кольцевого корпуса 3, разгоняя ракету. Поскольку проточный профиль газовода-сопла 17 является продолжением профиля сопла 6 маршевого двигателя, диффузор сопла маршевого двигателя улучшается, увеличивая удельный импульс реактивной силы работающего маршевого двигателя и тем самым практически компенсируется возможная потеря скорости, обусловленная наличием пассивной массы кольцевого корпуса 3 с уже отработавшими средствами ориентации. Таким образом создана возможность без каких-либо дополнительных энергетических затрат вынести пассивную массу из зоны стартовой площадки и, если это потребуется, сбросить ее с ракеты в заданный момент времени в заданном месте. Для этого производится подрыв пироболтов 8, а с помощью пиротолкателей 9 (фиг.4) создается начальный направленный импульс, необходимый для отделения пассивной массы кольцевого корпуса 3 с отработавшими средствами ориентации от ракеты при работающем маршевом двигателе.
Резюмируя изложенное, следует отметить, что изобретение в наилучшем примере своего воплощения позволяет с минимумом энергетических затрат обеспечить перехват внезапно появившейся цели в непосредственной близости от стартовой площадки, расположенной в затрудненных для старта условиях, и одновременно свести к минимуму вредное воздействие на стартовую площадку за счет исключения необходимости сброса на нее пассивной массы отработавших средств ориентации. При этом изобретение равно применимо как для крупногабаритных, так и для малогабаритных ракет. Более того, изобретение позволяет путем малой модернизации уже существующих ракет с наклонным стартом придать им все вышеизложенные качества. Предлагаемые три модификации в частных случаях выполнения исполнительной системы старта и ориентации ракеты с точки зрения достижения таких качественных показателей равноценны. Выбор той или иной из них будет определяться спецификой конкретной ракеты, в которой она будет воплощаться. То, что целесообразно в одних условиях, может оказаться менее выгодным в других условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045741C1 |
| Стартовый блок ракеты | 2020 |
|
RU2752300C1 |
| Газодинамическое устройство управления малых габаритов | 2020 |
|
RU2753034C1 |
| Стартовый блок ракеты | 2023 |
|
RU2805438C1 |
| СПОСОБ СТАРТА УПРАВЛЯЕМОЙ РАКЕТЫ ИЗ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240489C1 |
| Способ запуска на орбиту полезной нагрузки и многоразовая эжекторная ступень РН для его осуществления | 2019 |
|
RU2734965C1 |
| РАКЕТА С ПОДВОДНЫМ СТАРТОМ | 2007 |
|
RU2352894C1 |
| ВОЗВРАЩАЕМАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ | 2015 |
|
RU2603305C1 |
| РАКЕТА-НОСИТЕЛЬ, ВОЗВРАЩАЕМАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ И СПОСОБ ЕЕ ЗАПУСКА ПРИ ВОЗВРАЩЕНИИ И СИСТЕМА ВЕРТОЛЕТНОГО ПОДХВАТА ВОЗВРАЩАЕМОЙ СТУПЕНИ | 2015 |
|
RU2609539C1 |

Использование: ракетная техника, в частности, для круговой обороны без сброса пассивной массы на стартовую площадку. Сущность изобретения: исполнительная система старта и ориентации ракеты содержит стартовые средства, аэродинамические рули с приводом и средства ориентации, выполненные на основе по меньшей мере одного газогенератора и соединенных с ним реактивных сопел. Средства ориентации размещены в кольцевом корпусе, предназначенном для жесткой связи с хвостовой частью корпуса ракеты. Внутренняя поверхность кольцевого корпуса выполнена конусообразной и покрыта теплоизоляционным материалом с образованием газовода-сопла, проточный профиль которого является продолжением профиля сопла маршевого двигателя ракеты. 10 з.п. ф-лы, 8 ил.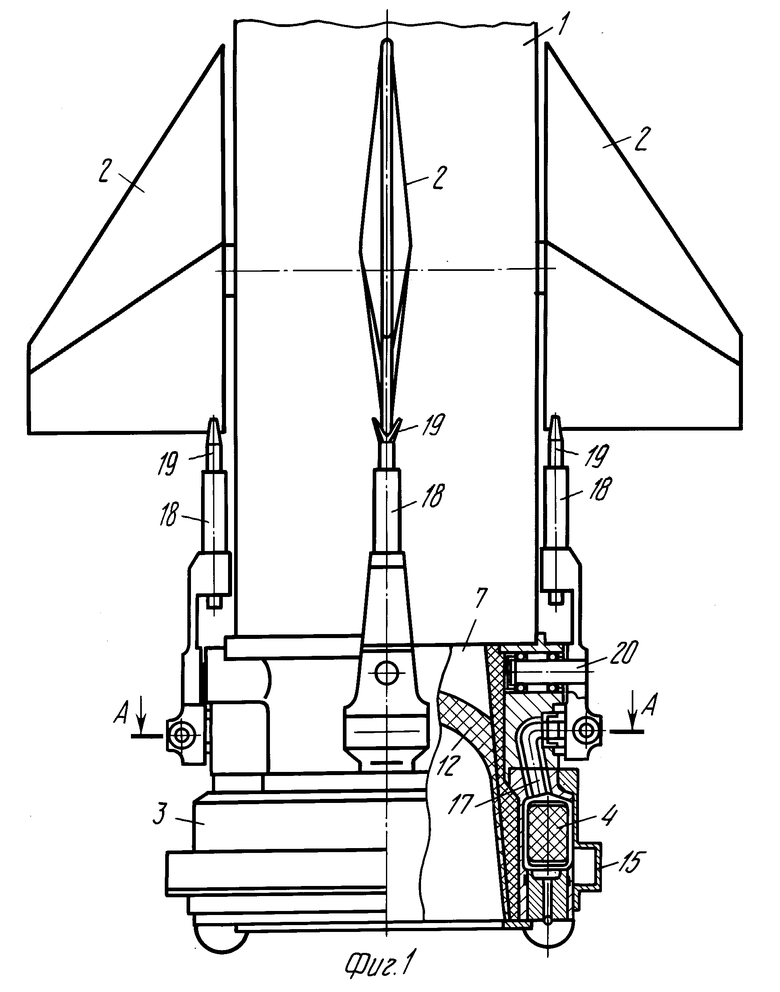
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США N 3286956, кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Экономайзер | 0 |
|
SU94A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Roger P | |||
| Berry, Aerospase Engineer US Army Missile Command Redstone Arsenal, Alabama, Development of an orientation control system for the advanced kinetic energy missile (ADKEM) | |||
| NY, 1992.-5p-(AIAA paper/American institute of Aeronauties and Astronauties; 92 - 2763). | |||

