Изобретение относится к беспилотным авиационным ракетным системам (БАРС) с многоразовой авиационной возвращаемой ракетой (МАВР) и ее соответствующими как высокоточным управляемым боеприпасом, имеющим комплект фронтального наведения и установленный сзади него комплект расширения дальности действия, так и модульным исполнением, обеспечивающим применение с различными типами бомб и блоков их наведения, но и с возможностью автоматической вертикальной посадки на хвост МАВР посредством винтореактивной системы, включающей турбореактивный двигатель с управляемым вектором тяги и отбором мощности на привод соосных двухлопастных несущих винтов (ДНВ), обеспечивающий на высоте до-/сверхзвуковой полет с разложенными Х-образными передним оперением, задним крылом и тянущими ДНВ/со сложенными лопастями ДНВ соответственно для выполнения миссии/при атаке цели/для минометного старта с вертикального транспортно-пускового контейнера и соответствующего средства базирования.
Известен комплекс для поражения подводных лодок (ПЛ) на больших дальностях, патент RU 2371668 С2, выполненный в виде баллистической ракеты (БР), в носовой части которой под сбрасываемым обтекателем размещена крылатая ракета (КР); БР содержит аэродинамические поверхности с приводами и разгонный двигатель для обеспечения доставки КР на дальность стрельбы к району расположения цели. Для экономичного полета в атмосфере КР состыкована с разгонным двигателем посредством устройства отделения, выполнена с возможностью полета в районе расположения ПЛ-цели и содержит отделяемую боевую часть (БЧ) подводного действия и отделяемый радиогидроакустический буй; система управления КР снабжена аппаратурой для приема информации от радиогидроакустического буя по радиоканалу о местонахождения цели. В соответствии с командами, осуществляющими поиск цели, ее обнаружение, сближение с целью и ее поражение путем подрыва БЧ. После чего БР-носитель продолжает полет с работающим двигателем, уводя ее от места приводнения БЧ подводного действия, чтобы не создавать помех системе ее самонаведения, когда одноразовая БР уходила из района приводнения БЧ и самоликвидировалась.
Известен беспилотный самолет проекта "X-plane" компании "Northrop Grumman" (США) [http://test.abovetopsecret.com/forum/thread398541/pgl], выполненный по схеме летающее крыло асимметрично изменяемой стреловидности (КАИС), имеет турбореактивные двухконтурные двигатели (ТРДД) в мотогондоле с внутренними бомбоотсеками и трехопорным убирающимся колесным шасси. Для сверхзвукового полета "X-plane" два ТРДД General Electric J85-21 с реактивной их тягой 4485 кгс обеспечивают на высоте полета 15 км скорость 1275/1487 км/ч при тяговооруженности 0,54/0,68. Самолеты с КАИС имеют ряд недостатков, основными из которых являются: смещение аэродинамического фокуса при разнонаправленной стреловидности, что приводит к увеличению балансировочного сопротивления; возрастание массы конструкции из-за наличия поворотных шарниров консолей. Кроме того, при большом угле 45° стреловидности консоль с прямой стреловидностью имеет больший эффективный угол атаки, чем консоль с обратной стреловидностью, что приводит к асимметрии лобового сопротивления и, как следствие, к возникновению паразитных разворачивающих моментов по крену, тангажу и рысканию. Более того, для КАИС характерны вдвое больший рост толщины пограничного слоя вдоль размаха, и любой несимметричный срыв потока вызывает интенсивные возмущения, а их устранение достигается путем использования двусторонней асимметрии планера.
Наиболее близким к предлагаемому изобретению является [см. http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml] британский палубный противолодочный авиационно-ракетный комплекс (ПАРК) модели "Icara" с беспилотным летательным аппаратом (БПЛА), имеющим крыло, фюзеляж с пусковым устройством (ПУ) бое-припаса (БП), двигатель силовой установки (СУ) и бортовую систему управления (БСУ) для управления с командного пункта средства базирования.
Признаки, совпадающие - БПЛА с габаритами без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м, несет противолодочную самонаводящуюся торпеду (СНТ) типа Мк.44, имеющую при ее массе 196 кг, длине 2,57 м и диаметре 324 мм, скорость 30 узлов и дальность хода 5 км. БПЛА с торпедой Мк.44 имеет максимальную/минимальная высоту полета 300/20 м и значительный вес, составляющий 1480 кг, что ограничивает дальность до 24 км и скорость полета до 140…240 м/с.
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БПЛА осуществлялся в направлении, максимально приближающем к цели. Данные о местоположении цели поступали от гидроакустической системы надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем в полете передавал их через БСУ на БПЛА. По прибытии БПЛА в район нахождения цели торпеда Мк.44, полуутопленная с подфюзеляжным ее расположением в корпусе БПЛА по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск цели. После чего БПЛА продолжает полет с работающей СУ, уводя его от места приводнения самонаводящейся СНТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БПЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном ПАРК "Icara" автоматического возврата на средство базирования с вертикальной посадкой на хвост ударной МАВР посредством винтореактивной системы, уменьшения габаритов в транспортно-походной ее конфигурации, повышения скорости и дальности полета, но и экономической эффективности за счет многоразового ее использования.
Отличительными признаками предлагаемого изобретения от указанного выше известного ПАРК "Icara", наиболее близкого к нему, являются наличие того, что многоцелевая АУРУС включает более чем одну многоразовую авиационную возвращаемую ракету (МАВР), выполненную как по составной продольной схеме триплана, несущую управляемый БП (УБП), включающий спереди комплект фронтального самонаведения (КФСН) с дупланными Х-образными крыльями (ДХОК) и установленный сзади него комплект расширения дальности действия, представляющий собой турбо-винтовентиляторный беспилотный самолет-вертолет (БПСВ), выполненный по аэродинамической схеме «утка», так и в модульном исполнении, обеспечивающим ее применение с различными типами бомб посредством соответствующих переходных отсеков и блоков с КФСН, но и с возможностью автоматических возврата и вертикальной посадки при вертикальном положении фюзеляжа одного БПСВ или в составе МАВР соответственно без или с высокоточным УБП при минимальной или максимальной посадочной массе посредством винтореактивной системы БПСВ, включающей турбореактивный двухконтурный двигатель (ТРДД) с боковыми воздухозаборниками (БВЗ) и отбором 44% мощности на привод соосных двухлопастных несущих винтов (ДНВ), обеспечивающий на высоте до-/сверхзвуковой полет с разложенными Х-образными передним оперением и задним крылом (ХОПО и ХОЗК) и лопастями ДНВ, выполненными с жестким креплением, без автоматов перекоса и с изменением общего их шага/со сложенными вниз на угол 90° взаимно перпендикулярными в плане лопастями ДНВ в продольные уступы фюзеляжа соответственно для выполнения миссии/при атаке цели/для минометного старта, например, с вертикального транспортно-пускового контейнера (ТПК) наземного или морского противокорабельного комплекса (ПКК), с обеспечением вне ТПК запуск ТРДД и синхронное раскладывание и фиксацию стреловидных консолей переднего крыла в ДХОК, включая и цельно-поворотного заднего трапециевидного крыла в ДХОК, смонтированных на корпусе КФСН, а также для повышения путевой устойчивости на сверхзвуковых скоростях полета цельно-поворотное ХОПО и ХОЗК, смонтированные на фюзеляже БПСВ в МАВР, несущей для выполнения миссии и атаки цели УБП, например, бронебойную авиационную бомбу (БрАБ) типа БрАБ-500ДС с ракетным ускорителем, размещенным в переходном отсеке, снабженным узлами автоматической стыковки/расстыковки с носовой частью БПСВ, летящей со скрытным ее выдвижением в зону надводной цели для выполнения миссии и возвратного полета БПСВ на место старта, например, к большому ракетному кораблю (БРК), при этом МАВР, выполненная в исполнении для наземного или морского либо воздушного базирования и с обеспечением возможности как соответствующего старта с ТПК либо ее запуска с самолета-носителя, так и после выполнения ее миссии возврата БПСВ на наземное или морское средство базирования либо на аэродром базирования самолета-носителя с вертикальной его посадкой на скрытной позиции, например, наземного ПКК, содержащего самоходную ПУ (СПУ) типа К-340П с двумя ТПК для запуска МАВР и самоходную посадочную площадку с термостойким верхним ее покрытием и поднимаемой мачтой-кантователем для приема БПСВ после его посадки на хвост и складывания его ХОЗК и ДНВ для приведения в горизонтальное их положение и взаимодействия с транспортно-загрузочной машиной ПКК, причем, например, на ударном БРК, содержащем более чем один его ТПК для морского базирования соответствующей МАВР, имеющей для выполнения посадочных операций при вертикальном положении фюзеляжа, например, БПСВ, в кормовой части последнего имеются в плоскости каждой лопасти ДНВ посадочные трапециевидные в плане четыре откидные рамы с самоустанавливающимися округлыми в плане амортизированными опорами, расположенными азимутально через 90°, связанными с телескопическими штоками их главных цилиндров, обеспечивающих из соответствующих уступов его фюзеляжа раскрытие посадочных опор, вынесенных назад по полету и наружу от кормовой двигательной установки (КДУ), обеспечивающей выполнение миссии МАВР в режиме автономного ее полета или в противокорабельной авиагруппе, при этом фюзеляж БПСВ в кормовой его части содержит внутренние продольные отсеки или ниши в трапециевидных Х-образных корневых наплывах (ХОКН), предназначенных для одновременного укладывания в них/раскладывания из них консолей ХОЗК, выполненных с обратным их сужением и плавно переходящую в его центральную часть фюзеляжа, снабженную БВЗ, выполненными нерегулируемыми с обеспечением дозвуковой и сверхзвуковой их работы и размешенными за продольными его уступами, предназначенными для укладывания в них лопастей верхнего ДНВ, причем при выполнении вертикального взлета/посадки и зависания система трансмиссии обеспечивает передачу мощности от ТРДД через муфту сцепления на промежуточный понижающий редуктор, выходной вал которого, размещенный над и по продольной оси фюзеляжа БПСВ, вращательно связан с угловым при виде сбоку промежуточным редуктором, передающим крутящий момент на соосный главный редуктор (СГР), в котором нижний и верхний ДНВ, закрепленные на соответствующих выходных его валах, верхний полый из которых снабжен внутри полым неподвижным валом (ПНВ), который жестко закреплен своим нижним концом внутри корпуса СГР, смонтированным на ребрах жесткости, закрепленных внутри центральной части фюзеляжа БПСВ, а выходным концом сцентрирован относительно верхнего вала СГР при помощи подшипникового узла так, что выступающая из верхнего его вала выходная часть ПНВ закреплена к верхнему корпусу опоры, смонтированной, например, на семи ребрах жесткости, закрепленных внутри носовой части фюзеляжа БПСВ.
Кроме того, в транспортно-походном положении МАВР сложенные консоли ее ХОЗК в БПСВ закрываются с упомянутой КДУ разделяемым обтекателем, повторяющим наружный и внутренний профили соответственно упомянутых ТПУ и кормовой части его фюзеляжа, имеющим возможность автоматического его удаления или сброса на ряду с одновременным сбросом и двух обтекателей со входов БВЗ при запуске составной МАВР в полет соответственно с ТПК или пуска самолета-носителя, причем упомянутый КФСН в упомянутом УБП снабжен комбинированной системой управления на базе инерциального и спутникового модулей, которые включают гибридную инерциальную навигационную систему/глобальную систему позиционирования наведения с возможным добавлением инфракрасного самонаведения или лазерного наведения для повышения точности, при этом модули с оптико-электронной головкой самонаведения или лазерными датчиками для точного наведения на цель, которые смонтированы в носовой части корпуса КФСН или на передних кромках раскладываемых консолей переднего крыла в ДХОК либо ХОПО, причем расширение двусторонне-асимметричной компоновки планера МАВР в ее упомянутых ДХОК, ХОПО и ХОЗК включает в продольном направлении асимметричное смещение их консолей, которое обеспечивает при преодолении сверхзвукового барьера синусоидальное распределение образования уплотнений воздуха на передних кромка их консолей, разнесенных так, что каждая верхняя правая консоль в ДХОК, ХОПО и ХОЗК вынесена вперед по полету от каждой их левой верхней консоли с зазором равным, например, δзаз, каждая из последних в свою очередь вынесена назад по плету от каждой их левой нижней консоли с зазором равным 1/2 δзаз, каждая из которых в свою очередь вынесена вперед по плету от каждой их правой нижней консоли с зазором равным δзаз, при этом планер МАВР выполнен по малозаметной технологии с покрытием, поглощающим радиоволны разной длины, имеет цельную конструкцию жесткого его корпуса с использованием алюминиево-литиевых сплавов и до 75% улучшенных по структурному старению композиционных материалов, усиленных лонжеронами и ребрами жесткости с единой обшивкой фюзеляжа и БВЗ из композиционных материалов, армированных углеродным волокном, способных защитить ее упомянутую БСУ от мощных электромагнитных вспышек или воздействия лазерного излучения, выдерживать значительные количества тепла и деформации, позволяющие снизить на порядок количество деталей, причем МАВР при ее взлете с палубы упомянутого БРК или запуске с упомянутого ТПК соответственно с нормальным или максимальным взлетным весом с ее упомянутым ТРДД, создающим с ДНВ их подъемную тяговоуроженность при вертикальном положении фюзеляжа, составляющую КПт=1,4 или КПТ=1,2, которая после завершения переходного маневра автоматически изменяется при горизонтальном положении фюзеляжа на маршевую тяговоуроженность: первого уровня- 0,15 или второго - 0,3 либо третьего - 0,34, используя соответственно упомянутый ТРДД с 43,3% или 86,6% либо 100% взлетной мощностью его адаптивной СУ с обеспечением на высоте полета не менее 12 км максимальной скорости полета Маха (М)=0,9 или М=1,04 либо М=1,1 соответственно, так и ее ХОЗК со стреловидностью χ=+60° позволит, в сравнении с крылом реактивного самолета и углом его стреловидности χ=+45°, уменьшить волновое сопротивление и потребную тяговооруженность, при этом для обеспечения и поддержания на высоте транс- или сверхзвукового режима полета МАВР соответственно в направлении выбранной для атаки цели или только как после 49% времени выполнения мисси и выработки топлива, так и при использовании стреловидности ее ХОЗК, например, с углом χ=+30° или χ+60°, что позволит обеспечить увеличение показателей аэродинамических и структурных преимуществ планера двусторонней асимметрии, улучшающей отношение аэродинамического качества к его сопротивлению, которое при соответствующей скорости полета МАВР до 0,98 Маха или 1,1 Маха составит 20 к 1 или 11 к 1, при этом в малозаметной МАВР, имеющей эффективную площадь рассеивания, составляющую 0,01 м2, в ее упомянутой КДУ упомянутый ТРДД снабжен поворотным реактивным соплом (ПРС) с системой его всеракурсного управления вектором тяги (ВУВТ), причем ТРДД с ВУВТ в различных направлениях перемещения его ПРС выполнен с возможностью отклонения на углы ±15°, при этом на вертикальных режимах полета и с соответствующим положением фюзеляжа, например, сверхманевренного БПСВ и для выполнения упомянутой его посадки на хвост, реализуемой с использованием упомянутых ДНВ и газодинамического способа, обеспечивающего создание управляющих сил и моментов при работе ТРДД с ВУВТ его ПРС, снабженное возможностью его отклонения вперед-назад или влево/вправо на углы ±15° от вертикали, создающее изменение балансировки по тангажу или крену соответственно, а в случае изменения крутящих моментов при противоположном вращении нижнего и верхнего упомянутых соосных ДНВ обеспечивается изменение балансировки по курсу, причем сверху фюзеляжа БПСВ в продольном его отсеке, снабженным автоматическими створками и автоматически выкидываемой парашютной системой, используемой для аварийной его посадки на наземный аэродром с одновременным складыванием упомянутых консолей его ХОПО и ХОЗК.
Предлагаемое изобретение многоцелевой АУРУС с ее МАВР, имеющей сложенные ДХОК на корпусе КФСН и ХОПО с ХОЗК на фюзеляже БПСВ, смонтирована в ТПК, имеет ТРДД с ВУВТ его ПРС, иллюстрируется на фиг. 1-3 общими видами:
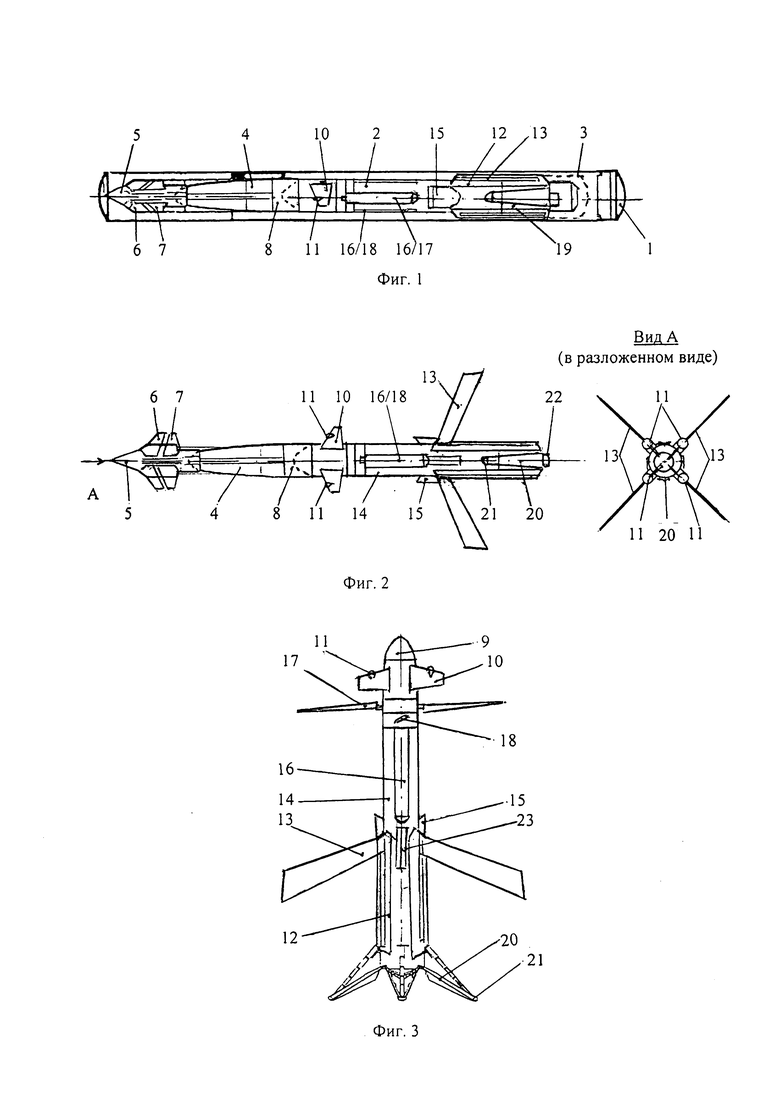
- на фиг. 1/2- изображена МАВР на виде сбоку/сверху в составе турбовинтовенти-ляторного БПСВ с ХОПО и ХОЗК, который состыкован посредством переходного отсека с высокоточным УБП, снабженным спереди корпусом КФСН с ДХОК в сложенном/разложенном виде их консолей (см. вид А) для минометного холодного старта с ТПК наземного ПКК/после пуска с пилона самолета-носителя;
- на фиг. 3 - изображен БПСВ на виде сверху с разложенным ХОПО и раскладываемым ХОЗК с его стреловидностью χ+30° на вертикальных режимах полета и при вертикальном положении фюзеляжа для посадки на хвост с использованием четырех амортизационных выдвижных посадочных опор, имеющих трапециевидную их форму при виде сбоку с округлыми опорами и вынесенных назад и наружу от его КДУ.
Модульная АУРУС, представленная на фиг. 1-3, содержит в ТПК 1 ударную МАВР 2 со сбрасываемым кормовым обтекателем 3 (показанным пунктиром на фиг. 1), выполненную по продольной схеме триплана, несет УБП 4, включающий корпус 5 КФСН со складываемыми стреловидным передним крылом 6 и задним цельно-поворотным трапециевидным крылом (ЦПТК) 7 в ДХОК 6-7 и переходной отсек 8, соединяющий УБП 4 с БПСВ 9, имеющий цельно-поворотное ХОПО 10 с лазерными датчиками 11 для точного наведения на передней его кромке и раскладываемое из корневых наплывов 12 обратного сужения консоли ХОЗК 13. Малозаметный БПСВ 9, выполненный по аэродинамической схеме «утка», содержит фюзеляж 14 с двумя БВЗ 15 и четыре продольных уступа 16, предназначенных для размещения в них четырех складываемых лопастей верхнего 17 и нижнего 18 соосных ДНВ, а также четыре раскладываемые посадочные опоры, смонтированные на конце КДУ 19, выполненные в виде откидных трапециевидных рам 20 с самоустанавливающимися округлыми в плане амортизированными их опорами 21. Малогабаритный ТРДД, размещенный в КДУ 19, выполнен с ВУВТ его ПРС 22 и системой трансмиссии, которая при выполнении вертикального взлета/посадки и зависания обеспечивает в адаптивной СУ передачу 44% мощности от ТРДД на привод верхнего 17 и нижнего 18 соосных ДНВ. В центральной части фюзеляжа 14 БПСВ 9 над его центром масс смонтирован верхний продольный отсек 23 с автоматическими створками и автоматически выкидываемой парашютной системой (на фиг. 1-3 не показано), используемой для аварийной его посадки на наземный аэродром базирования его самолета-носителя с одновременным складыванием консолей ХОПО 10 и ХОЗК 13 БПСВ 9.
Модульная МАВР 2/малозаметный БПСВ 9 выполняют совместный или отдельный полет соответственно после запуска с ТПК 1 наземного ПКК/для выполнения миссии при пикировании и создании СУ потребной реактивной тяги ее ТРДД с ВУВТ его ПРС 22 для транс-/сверхзвукового крейсерского полета, при котором продольное и путевое управление обеспечивается синхронным и асинхронным отклонением двух верхних ЦПТК 7/ХОПО 10. Поперечное управление осуществляется дифференциальным соответствующим отклонением левого и правого нижних ЦПТК 7/ХОПО 10 (см. фиг. 1/2). Управление движением и МАВР 2, и БПСВ 9 на всех этапах полета осуществляется навигационным пилотажным комплексом, входящим в состав бортовой системы управления, которая обеспечивает прием и обработку информации от навигационных спутников и вырабатывает соответствующие сигналы управления. Все это позволит в многоцелевой АУРУС упростить управляемость и повысить надежность, а также безаварийность дистанционного управления и МАВР 2 и, БПСВ 9.
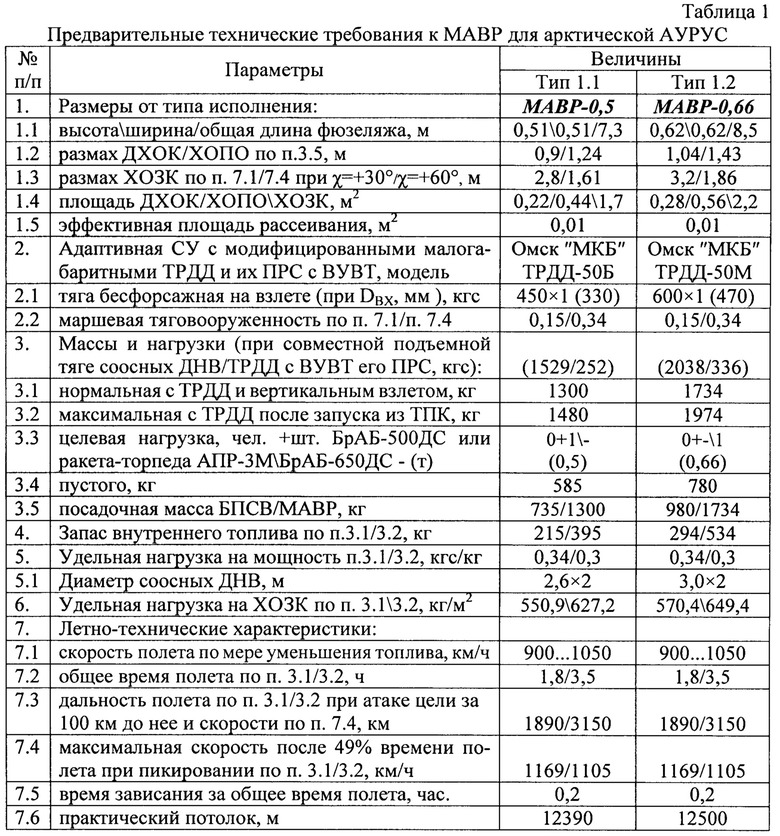
Таким образом, освоение мобильной или палубной АУРУС с авиагруппой сверхзвуковых МАВР-0,66, базируемых в составе наземного ПКК соответственно на транс-портно-заряжающей машине (ТЗМ) типа К-342Р или атомном БРК, которые могут включать не менее двенадцати ТПК типа ЗС-14-11442М, используемые и для пуска ПКР «Оникс», и для соответствующего количества МАВР-0,66, несущих по одной БрАБ-650ДС (см. табл. 1) и имеющих головной БПСВ-разведчик, который полностью оцифрован и включает с использованием лазерного канала связи и четвертый уровень так называемого manned and unmanned teaming (MUM-T), что позволит оснастить его БСУ двухчастотной бортовой РЛС с АФАР, которая на безопасных для него расстояниях реализует связь по закрытому каналу с другими БПСВ-разведчиками в других АУРУС, обеспечивающих геолокацию надводной цели и управление по лазерному каналу связи оружейными нагрузками противокорабельными их МАВР с наведением на цель их БрАБ-650ДС в составе ударной авиагруппы, применяемыми совместно с рядом других АУРУС, способных обмениваться информацией между их головными БПСВ-разведчиками в рамках беспилотной их единой системы и передавать целеуказание на ряд других МАВР. Кроме того, использование в мобильных ПКК наземного/морского базирования возможности минометного старта МАВР-0,5/МАВР-0,66 из их ТПК позволит увеличить в 1,8 раза массу их авиатоплива, повысить поражающую возможность и боевую устойчивость ПКК. При этом, конвертируя МАВР-0,5 до целевой нагрузки (ЦН)=0,52 кг и ее УБП на ПКР Х-35У, и, имея радиус ее действия до 1400 км, позволит увеличить до 1660 км дальность полета ПКР, что практически в 6,3 раза превосходит дальность поражения берегового ПКК «Бал» с ПКР Х-35У.
Поскольку, перспективная АУРУС с передовыми тактико-техническими показателями для мобильного ПКК, доставляющего в арктический район авиагруппу БПСВ МАВР-0,66, несущие БрАБ-650ДС, то ее освоение с учетом опыта создания ТПК типа ЗС-14-11442М, используемые и для пуска ПКР «Оникс», является задачей экономически предпочтительной и технически реализуемой. Только освоение арктической АУРУС существенно упростит развертывание противокорабельной авиатехники и весьма повысит боевую ее устойчивость, особенно, на большом ее удалении от цели, и места базирования. По сути, боевые возможности АУРУС не ограничиваются полетом ее МАВР и в большей степени зависят от мобильного ПКК. Поэтому ударные МАВР как элементы передовой военной техники с точки зрения тактики могут занимать промежуточное место между крылатыми ракетами и самолетами. Первые способны самостоятельно атаковать цели, но при этом весьма дороги. Ударная авиация с учетом ее арктического базирования также будет не дешевле, но самолетам приходится еще залетать в зону действия ПВО цели. Применение МАВР-0,66 позволит им реализовать ударную миссию с требуемой эффективностью и без рисков для пилотов, но и, выполняя роль так называемой "длиной руки", повысить поражающую возможность.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2023 |
|
RU2823932C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2827270C1 |
| БЕРЕГОВОЙ КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ МНОГОРАЗОВЫЙ АВТОНОМНЫЙ | 2021 |
|
RU2768999C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| МНОГОЭЛЕМЕНТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2769000C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2816404C1 |
| УДАРНО-БОЕВОЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2778159C1 |
| КОНВЕРТИРУЕМЫЙ ДВУХКИЛЕВОЙ ДОЗВУКОВОЙ САМОЛЕТ ТРЕХВАРИАНТНОГО БАЗИРОВАНИЯ | 2024 |
|
RU2833909C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ САМОЛЕТОМ-ВЕРТОЛЕТОМ | 2018 |
|
RU2710317C1 |
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
Изобретение относится области авиации, в частности к конструкциям беспилотных авиационных систем. Беспилотная авиационная ракетная система содержит многоразовую авиационную возвращаемую ракету (МАВР) с высокоточным управляемым боеприпасом, имеющим комплект фронтального наведения и установленный сзади него комплект расширения дальности действия. Ракета имеет модульную конструкцию, обеспечивающую применение с различными типами бомб и блоков их наведения, и с возможностью автоматической вертикальной посадки на хвост МАВР посредством винтореактивной системы. Винтореактивная система включает турбореактивный двигатель с управляемым вектором тяги и отбором мощности на привод соосных двухлопастных несущих винтов (ДНВ), обеспечивающий на высоте полет с разложенными Х-образными передним оперением, задним крылом и тянущими ДНВ или со сложенными лопастями ДНВ соответственно для выполнения атаки цели или для минометного старта из вертикального транспортно-пускового контейнера. Обеспечивается повышение дальности полета, уменьшение габаритов в транспортном положении, возможность многократного использования. 1 з.п. ф-лы, 1 табл., 3 ил.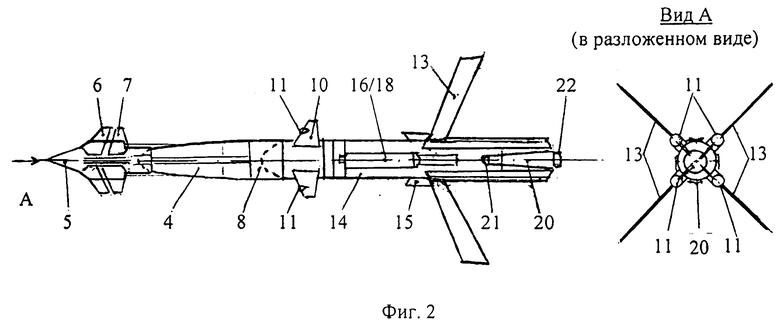
1. Многоцелевая беспилотная авиационная ракетная система (БАРС) с беспилотным летательным аппаратом, имеющим крыло, фюзеляж с пусковым устройством (ПУ) боеприпаса (БП), двигатель силовой установки (СУ) и бортовую систему управления (БСУ) для управления с командного пункта средства базирования, отличающаяся тем, что она включает более чем одну многоразовую авиационную возвращаемую ракету (МАВР), выполненную как по составной продольной схеме триплана, несущую управляемый БП (УБП), включающий спереди комплект фронтального самонаведения (КФСН) с дупланными Х-образными крыльями (ДХОК) и установленный сзади него комплект расширения дальности действия, представляющий собой турбовинтовентиляторный беспилотный самолет-вертолет (БПСВ), выполненный по аэродинамической схеме «утка», так и в модульном исполнении, обеспечивающем ее применение с различными типами бомб посредством соответствующих переходных отсеков и блоков с КФСН, но и с возможностью автоматических возврата и вертикальной посадки при вертикальном положении фюзеляжа одного БПСВ или в составе МАВР соответственно без или с высокоточным УБП при минимальной или максимальной посадочной массе посредством винтореактивной системы БПСВ, включающей турбореактивный двухконтурный двигатель (ТРДД) с боковыми воздухозаборниками (БВЗ) и отбором 44% мощности на привод соосных двухлопастных несущих винтов (ДНВ), обеспечивающий на высоте до-/сверхзвуковой полет с разложенными Х-образными передним оперением и задним крылом (ХОПО и ХОЗК) и лопастями ДНВ, выполненными с жестким креплением, без автоматов перекоса и с изменением общего их шага/со сложенными вниз на угол 90° взаимно перпендикулярными в плане лопастями ДНВ в продольные уступы фюзеляжа соответственно для выполнения миссии/при атаке цели/для минометного старта, например, с вертикального транспортно-пускового контейнера (ТПК) наземного или морского противокорабельного комплекса (ПКК), с обеспечением вне ТПК запуск ТРДД и синхронное раскладывание и фиксацию стреловидных консолей переднего крыла в ДХОК, включая и цельно-поворотного заднего трапециевидного крыла в ДХОК, смонтированных на корпусе КФСН, а также для повышения путевой устойчивости на сверхзвуковых скоростях полета цельно-поворотное ХОПО и ХОЗК, смонтированные на фюзеляже БПСВ в МАВР, несущей для выполнения миссии и атаки цели УБП, например, бронебойную авиационную бомбу (БрАБ) типа БрАБ-500ДС с ракетным ускорителем, размещенным в переходном отсеке, снабженным узлами автоматической стыковки/расстыковки с носовой частью БПСВ, летящей со скрытным ее выдвижением в зону надводной цели для выполнения миссии и возвратного полета БПСВ на место старта, например к большому ракетному кораблю (БРК), при этом МАВР, выполненная в исполнении для наземного или морского либо воздушного базирования и с обеспечением возможности как соответствующего старта с ТПК либо ее запуска с самолета-носителя, так и после выполнения ее миссии возврата БПСВ на наземное или морское средство базирования либо на аэродром базирования самолета-носителя с вертикальной его посадкой на скрытной позиции, например, наземного ПКК, содержащего самоходную ПУ (СПУ) типа К-340П с двумя ТПК для запуска МАВР и самоходную посадочную площадку с термостойким верхним ее покрытием и поднимаемой мачтой-кантователем для приема БПСВ после его посадки на хвост и складывания его ХОЗК и ДНВ для приведения в горизонтальное их положение и взаимодействия с транспортно-загрузочной машиной ПКК, причем, например, на ударном БРК, содержащем более чем один его ТПК для морского базирования соответствующей МАВР, имеющей для выполнения посадочных операций при вертикальном положении фюзеляжа, например, БПСВ, в кормовой части последнего имеются в плоскости каждой лопасти ДНВ посадочные трапециевидные в плане четыре откидные рамы с самоустанавливающимися округлыми в плане амортизированными опорами, расположенными азимутально через 90°, связанными с телескопическими штоками их главных цилиндров, обеспечивающих из соответствующих уступов его фюзеляжа раскрытие посадочных опор, вынесенных назад по полету и наружу от кормовой двигательной установки (КДУ), обеспечивающей выполнение миссии МАВР в режиме автономного ее полета или в противокорабельной авиагруппе, при этом фюзеляж БПСВ в кормовой его части содержит внутренние продольные отсеки или ниши в трапециевидных Х-образных корневых наплывах (ХОКН), предназначенных для одновременного укладывания в них/раскладывания из них консолей ХОЗК, выполненных с обратным их сужением и плавно переходящих в его центральную часть фюзеляжа, снабженную БВЗ, выполненными нерегулируемыми с обеспечением дозвуковой и сверхзвуковой их работы и размешенными за продольными его уступами, предназначенными для укладывания в них лопастей верхнего ДНВ, причем при выполнении вертикального взлета/посадки и зависания система трансмиссии обеспечивает передачу мощности от ТРДД через муфту сцепления на промежуточный понижающий редуктор, выходной вал которого, размещенный над и по продольной оси фюзеляжа БПСВ, вращательно связан с угловым при виде сбоку промежуточным редуктором, передающим крутящий момент на соосный главный редуктор (СГР), в котором нижний и верхний ДНВ, закрепленные на соответствующих выходных его валах, верхний полый из которых снабжен внутри полым неподвижным валом (ПНВ), который жестко закреплен своим нижним концом внутри корпуса СГР, смонтированным на ребрах жесткости, закрепленных внутри центральной части фюзеляжа БПСВ, а выходным концом сцентрирован относительно верхнего вала СГР при помощи подшипникового узла так, что выступающая из верхнего его вала выходная часть ПНВ закреплена к верхнему корпусу опоры, смонтированной, например, на семи ребрах жесткости, закрепленных внутри носовой части фюзеляжа БПСВ.
2. Многоцелевая беспилотная авиационная ракетная система (БАРС) по п. 1, отличающаяся тем, что в транспортно-походном положении МАВР сложенные консоли ее ХОЗК в БПСВ закрываются с упомянутой КДУ разделяемым обтекателем, повторяющим наружный и внутренний профили соответственно упомянутых ТПУ и кормовой части его фюзеляжа, имеющим возможность автоматического его удаления или сброса на ряду с одновременным сбросом и двух обтекателей со входов БВЗ при запуске составной МАВР в полет соответственно с ТПК или пуска самолета-носителя, причем упомянутый КФСН в упомянутом УБП снабжен комбинированной системой управления на базе инерциального и спутникового модулей, которые включают гибридную инерциальную навигационную систему/глобальную систему позиционирования наведения с возможным добавлением инфракрасного самонаведения или лазерного наведения для повышения точности, при этом модули с оптико-электронной головкой самонаведения или лазерными датчиками для точного наведения на цель, которые смонтированы в носовой части корпуса КФСН или на передних кромках раскладываемых консолей переднего крыла в ДХОК либо ХОПО, причем расширение двусторонне-асимметричной компоновки планера МАВР в ее упомянутых ДХОК, ХОПО и ХОЗК включает в продольном направлении асимметричное смещение их консолей, которое обеспечивает при преодолении сверхзвукового барьера синусоидальное распределение образования уплотнений воздуха на передних кромках их консолей, разнесенных так, что каждая верхняя правая консоль в ДХОК, ХОПО и ХОЗК вынесена вперед по полету от каждой их левой верхней консоли с зазором равным, например, δзаз, каждая из последних в свою очередь вынесена назад по полету от каждой их левой нижней консоли с зазором равным 1/2 δзаз, каждая из которых в свою очередь вынесена вперед по полету от каждой их правой нижней консоли с зазором равным δзаз, при этом планер МАВР выполнен по малозаметной технологии с покрытием, поглощающим радиоволны разной длины, имеет цельную конструкцию жесткого его корпуса с использованием алюминиево-литиевых сплавов и до 75% улучшенных по структурному старению композиционных материалов, усиленных лонжеронами и ребрами жесткости с единой обшивкой фюзеляжа и БВЗ из композиционных материалов, армированных углеродным волокном, способных защитить ее упомянутую БСУ от мощных электромагнитных вспышек или воздействия лазерного излучения, выдерживать значительные количества тепла и деформации, позволяющие снизить на порядок количество деталей, причем МАВР при ее взлете с палубы упомянутого БРК или запуске с упомянутого ТПК соответственно с нормальным или максимальным взлетным весом с ее упомянутым ТРДД, создающим с ДНВ их подъемную тяговооруженность при вертикальном положении фюзеляжа, составляющую КПТ=1,4 или Кпт=1,2, которая после завершения переходного маневра автоматически изменяется при горизонтальном положении фюзеляжа на маршевую тяговооруженность: первого уровня - 0,15, или второго - 0,3, либо третьего - 0,34, используя соответственно упомянутый ТРДД с 43,3%, или 86,6%, либо 100% взлетной мощностью его адаптивной СУ с обеспечением на высоте полета не менее 12 км максимальной скорости полета Маха (M)=0,9, или М=1,04, либо М=1,1 соответственно, так и ее ХОЗК со стреловидностью χ=+60° позволит, в сравнении с крылом реактивного самолета и углом его стреловидности χ=+450, уменьшить волновое сопротивление и потребную тяговооруженность, при этом для обеспечения и поддержания на высоте транс- или сверхзвукового режима полета МАВР соответственно в направлении выбранной для атаки цели или только как после 49% времени выполнения мисси и выработки топлива, так и при использовании стреловидности ее ХОЗК, например, с углом χ=+30° или χ=60°, что позволит обеспечить увеличение показателей аэродинамических и структурных преимуществ планера двусторонней асимметрии, улучшающей отношение аэродинамического качества к его сопротивлению, которое при соответствующей скорости полета МАВР до 0,98 Маха или 1,1 Маха составит 20 к 1 или 11 к 1, при этом в малозаметной МАВР, имеющей эффективную площадь рассеивания, составляющую 0,01 м2, в ее упомянутой КДУ упомянутый ТРДД снабжен поворотным реактивным соплом (ПРС) с системой его всеракурсного управления вектором тяги (ВУВТ), причем ТРДД с ВУВТ в различных направлениях перемещения его ПРС выполнен с возможностью отклонения на углы ±15°, при этом на вертикальных режимах полета и с соответствующим положением фюзеляжа, например, сверхманевренного БПСВ и для выполнения упомянутой его посадки на хвост, реализуемой с использованием упомянутых ДНВ и газодинамического способа, обеспечивающего создание управляющих сил и моментов при работе ТРДД с ВУВТ его ПРС, снабженного возможностью его отклонения вперед-назад или влево-вправо на углы ±15° от вертикали, создающего изменение балансировки по тангажу или крену соответственно, а в случае изменения крутящих моментов при противоположном вращении нижнего и верхнего упомянутых соосных ДНВ обеспечивается изменение балансировки по курсу, причем сверху фюзеляжа БПСВ в продольном его отсеке, снабженном автоматическими створками и автоматически выкидываемой парашютной системой, используемой для аварийной его посадки на наземный аэродром с одновременным складыванием упомянутых консолей его ХОПО и ХОЗК.
| СПОСОБ ПОРАЖЕНИЯ ПОДВОДНЫХ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ И КОМПЛЕКС ПРОТИВОЛОДОЧНОГО ВООРУЖЕНИЯ | 2007 |
|
RU2371668C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ | 2013 |
|
RU2554640C2 |
| СПОСОБ ОПЕРАТИВНОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ ТЕРПЯЩИМ БЕДСТВИЕ ЛЮДЯМ В УДАЛЕННЫХ РАЙОНАХ С НЕТОЧНО ИЗВЕСТНЫМИ КООРДИНАТАМИ И РАКЕТНЫЙ КОМПЛЕКС ОПЕРАТИВНОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ | 2016 |
|
RU2651350C1 |
| US 9533758 B2, 03.01.2017 | |||
| US 20170146317 A1, 25.05.2017 | |||
| CN 110871882 A, 10.03.2020. | |||

