Изобретение относится к ракетной технике и может быть использовано во вращающихся управляемых ракетах, например, с одноканальной системой управления (ОСУ), имеющих широкий диапазон изменения скорости полета от дозвуковой до сверхзвуковой.
Известен из уровня техники “Вращающийся сверхзвуковой реактивный снаряд” (см. патент РФ №2166178), который содержит корпус с расположенными в нем боевым отсеком, реактивным двигателем и установленным на корпусе хвостовым стабилизатором, консоли которого установлены под углом к продольной оси корпуса. Консоли стабилизатора имеют скосы у передних и задних кромок консолей на поверхностях, обращенных в сторону вращения снаряда, при этом отношение угла установки консолей к углу скоса кромок находится в пределах  , где Н - полный размах консолей стабилизатора (с учетом подкорпусной части стабилизатора), d - калибр корпуса снаряда. Консоли стабилизатора, установленные под углом к продольной оси корпуса, выполненные со скосами у передней и задней кромок каждой консоли на поверхности, обращенной в сторону вращения среза, являются стабилизатором скорости вращения снаряда, позволяющим стабилизировать скорость вращения снаряда, т.е. уменьшить разбежку скорости вращения снаряда в широком диапазоне изменения скорости полета от дозвуковой до сверхзвуковой.
, где Н - полный размах консолей стабилизатора (с учетом подкорпусной части стабилизатора), d - калибр корпуса снаряда. Консоли стабилизатора, установленные под углом к продольной оси корпуса, выполненные со скосами у передней и задней кромок каждой консоли на поверхности, обращенной в сторону вращения среза, являются стабилизатором скорости вращения снаряда, позволяющим стабилизировать скорость вращения снаряда, т.е. уменьшить разбежку скорости вращения снаряда в широком диапазоне изменения скорости полета от дозвуковой до сверхзвуковой.
Данный неуправляемый снаряд по патенту РФ №2166178, имеющий из оперения только хвостовые стабилизаторы, является статически устойчивым снарядом, поэтому его полет проходит при нулевом угле атаке (α =0). Однако при увеличении углов атаки скорость вращения такого снаряда будет падать. Это объясняется тем, что при обтекании корпуса снаряда на нем образуется пограничный слой потока с уменьшенной скоростью. Толщина пограничного слоя, зародившегося на носовой части корпуса, постепенно увеличивается по мере продвижения к кормовой (хвостовой) части. При α =0 пограничный слой имеет симметричный характер относительно оси корпуса. При α >0 симметричность нарушается: пограничный слой с наветренной стороны будет перетекать за счет поперечного течения на подветренную сторону корпуса, при этом толщина пограничного слоя на подветренной стороне корпуса будет увеличиваться (Петров К.П. Аэродинамика ракет. М.: Машиностроение, 1977, с.27-30). В этом месте поверхности корпуса скорость поперечного течения будет замедляться, и будут создаваться условия для отрыва потока с боковых сторон корпуса. Непрерывно утолщающийся по длине корпуса пограничный слой отрывается вдоль линии отрыва и непрерывно сносится по потоку, сворачиваясь в интенсивные вихревые жгуты, расположенные с боковых сторон корпуса. Расстояние от носка корпуса, на котором начинается отрыв пограничного слоя и сворачивание вихревых жгутов, в значительной степени зависит от угла атаки. Как показывают опыты по распределению давления по различным поперечным сечениям и по фотоснимкам спектров обтекания корпуса модели в аэродинамической трубе, при углах α =6-8° , близких к балансировочным углам предлагаемой управляемой ракеты при максимальной команде управления, начало отрыва потока и начало образования вихревой системы за моделью составляет  калибров от начала цилиндрической части корпуса в диапазоне чисел М=0,6-2,0. При таких углах атаки (α =6-8° ) сорвавшийся пограничный слой сворачивается в вихревые жгуты и под действием продольного течения сносится вдоль корпуса за его кормовую (хвостовую) часть, на которой установлены стабилизаторы. Часть консолей крестообразного стабилизатора, как правило, половина (т.е. 2 консоли из 4-х), оказывается в зоне неблагоприятных скосов потока, связанных с направлением движения воздуха в вихрях. Это приводит к уменьшению несущих свойств стабилизатора (Петров К.П. Аэродинамика ракет. М.: Машиностроение, 1977, с. 84-86). Это приводит также к значительному уменьшению эффективности по крену этих 2-х консолей, находящихся в вихревом слое, а следовательно, и всего стабилизатора в целом.
калибров от начала цилиндрической части корпуса в диапазоне чисел М=0,6-2,0. При таких углах атаки (α =6-8° ) сорвавшийся пограничный слой сворачивается в вихревые жгуты и под действием продольного течения сносится вдоль корпуса за его кормовую (хвостовую) часть, на которой установлены стабилизаторы. Часть консолей крестообразного стабилизатора, как правило, половина (т.е. 2 консоли из 4-х), оказывается в зоне неблагоприятных скосов потока, связанных с направлением движения воздуха в вихрях. Это приводит к уменьшению несущих свойств стабилизатора (Петров К.П. Аэродинамика ракет. М.: Машиностроение, 1977, с. 84-86). Это приводит также к значительному уменьшению эффективности по крену этих 2-х консолей, находящихся в вихревом слое, а следовательно, и всего стабилизатора в целом.
Это подтверждается результатами экспериментов в аэродинамических трубах на вращающихся моделях предлагаемой управляемой ракеты. Как правило, чтобы иметь отдельные составляющие ракеты по моменту крена, проводятся раздельные испытания аэродинамической модели, т.е. вначале проводятся испытания модели в состоянии “корпус + стабилизаторы”, потом добавляются дестабилизаторы и рули. Как показали результаты испытаний модели ракеты в состоянии “корпус + стабилизаторы”, соответствующей аэродинамической компоновке снаряда по патенту №2166178, скорость вращения модели при α =6-8° уменьшалась на 20-30% при числах М=0,6-1,3, на 10-15% при сверхзвуковых числах М>1,3, по сравнению со скоростью вращения при α =0.
Для управляемой ракеты с ОСУ, полет которой проходит при α >0, такого уменьшения скорости вращения допускать нельзя, поэтому установленные под углом к продольной оси корпуса консоли хвостового стабилизатора, выполненные с несимметричным профилем, т.е. со скосами около передней и задней кромок на сторонах консолей, обращенных в сторону вращения ракеты, не могут обеспечить требуемый диапазон изменения скорости вращения управляемой ракеты.
Кроме того, отношение угла установки консоли (лопасти) α уст к углу скоса кромок ϕ ск, равное  H/d, неприемлемо для управляемой ракеты. Наличие аэродинамических рулей и дестабилизаторов ведет к относительному увеличению коэффициента момента демпфирования по крену, поэтому отношение
H/d, неприемлемо для управляемой ракеты. Наличие аэродинамических рулей и дестабилизаторов ведет к относительному увеличению коэффициента момента демпфирования по крену, поэтому отношение  будет больше за счет большего установочного угла консолей. Отношение
будет больше за счет большего установочного угла консолей. Отношение  могло бы уменьшиться за счет увеличения угла скоса ϕ cк, но угол ϕ cк для заднего скоса не может быть больше ϕ cк.з=12° , так как при ϕ ск.з>12° на заднем скосе возникает отрыв потока в диапазоне чисел М=1,7-2,2, соответствующих скорости полета ракеты на основном маршевом участке траектории (Краснов М.Ф. и др. Аэродинамика отрывных течений. - М.: Высшая школа, 1988, с.48-51), и эффективность по крену такого скоса резко уменьшается. На переднем скосе угол не должен превышать ϕ cкп=17° , т.к. при М=1,7 и ϕ cкп>17° происходит отход скачка уплотнения (Кибардин Ю.А. и др. Атлас газодинамических функций при больших скоростях и высоких температурах воздушного потока. М.: Госэнергоиздат, 1961, с.182-183), и тогда эффективность по крену переднего скоса будет уменьшаться.
могло бы уменьшиться за счет увеличения угла скоса ϕ cк, но угол ϕ cк для заднего скоса не может быть больше ϕ cк.з=12° , так как при ϕ ск.з>12° на заднем скосе возникает отрыв потока в диапазоне чисел М=1,7-2,2, соответствующих скорости полета ракеты на основном маршевом участке траектории (Краснов М.Ф. и др. Аэродинамика отрывных течений. - М.: Высшая школа, 1988, с.48-51), и эффективность по крену такого скоса резко уменьшается. На переднем скосе угол не должен превышать ϕ cкп=17° , т.к. при М=1,7 и ϕ cкп>17° происходит отход скачка уплотнения (Кибардин Ю.А. и др. Атлас газодинамических функций при больших скоростях и высоких температурах воздушного потока. М.: Госэнергоиздат, 1961, с.182-183), и тогда эффективность по крену переднего скоса будет уменьшаться.
Таким образом, стабилизатор скорости вращения неуправляемого снаряда в виде консолей (лопастей) стабилизатора, установленных под углом к продольной оси корпуса и выполненных с несимметричным профилем за счет скосов у передней и задней кромок, не может быть использован на вращающейся управляемой ракете.
Если диапазон изменения скорости вращения неуправляемого снаряда по патенту №2166178 ограничен только резонансными частотами: снизу частота вращения ограничена частотой собственных колебаний снаряда вокруг поперечных осей (fz≈8-10 Гц), а сверху частотой изгибных колебаний корпуса (fк>100 Гц), и на этом снаряде можно допустить и срыв потока на заднем скосе, и отход скачка уплотнения на переднем скосе, то на управляемой ракете, имеющей жесткие требования по скорости вращения с относительно малым диапазоном изменения (fх=12-20 Гц, т.е. fх=12-20 об/с), этих явлений нельзя допускать, т.к. скорость вращения управляемой ракеты связана с быстродействием рулевого привода, и несоответствие частоты вращения ракеты требованиям по этой частоте может приводить к фазовым перекосам в управлении и уменьшению точности наведения ракеты в цель.
Наиболее близким аналогом заявленного решения является вращающаяся управляемая ракета с ОСУ переносного зенитного ракетного комплекса (ПЗРК) “Стингер” (Зарубежное военное обозрение, 1991, №1, с.35-37), содержащая корпус с расположенными в нем боевым отсеком, реактивным двигателем, установленные на корпусе хвостовые стабилизаторы и дестабилизаторы на передней части корпуса, причем раскрывающиеся консоли стабилизатора установлены под углом к продольной оси корпуса, за счет чего осуществляется вращение ракеты в полете. Недостатком ракеты “Стингер” является то, что ее скорость вращения вокруг продольной оси корпуса имеет большой разброс при изменении скорости полета от дозвуковой до сверхзвуковой, т.к. скорость вращения, обусловленная только установочным углом консолей стабилизатора с симметричным профилем, практически прямо пропорциональна скорости полета. Для возможности управления на участке разгона ракета “Стингер” предварительно раскручивается при движении в пусковой трубе за счет установочного угла относительно продольной оси корпуса сопл стартового двигателя. При полете на участке разгона скорость вращения ракеты уменьшается от начальной при выходе из пусковой трубы до минимума оборотов (так называемой “ложки” оборотов), где скорость вращения может быть меньше минимально требуемой. Для увеличения скорости вращения в минимуме оборотов приходится увеличивать начальную скорость вращения за счет увеличения установочного угла сопл стартового двигателя, что приводит к превышению начальной скорости вращения по сравнению с максимально требуемой скоростью вращения.
Установочный угол консолей стабилизатора по величине рассчитан на требуемую скорость вращения при скоростях полета, соответствующих основному маршевому участку траектории полета. На пассивном участке траектории при падении скорости полета падает и скорость вращения. Для увеличения диапазона изменения требуемой скорости вращения ракеты “Стингер” в ее системе управления используется фазорегулятор, что усложняет систему управления, увеличивает массу и габариты ракеты. Из-за того, что диапозон изменения требуемой скорости вращения не может увеличиваться беспредельно, часть пассивного участка траектории теряется, вследствие чего дальность управляемого полета ракеты уменьшается.
Целью заявленного изобретения является повышение точности наведения управляемой ракеты в цель путем стабилизации скорости вращения управляемой ракеты в широком диапазоне изменения скорости полета от дозвуковой до сверхзвуковой при изменении углов атаки от нулевого до балансировочных без увеличения веса и габаритов ракеты, без усложнения ее системы управления.
Поставленная цель достигается тем, что в известной ракете, содержащей корпус с расположенным в нем боевым отсеком, реактивным двигателем и хвостовым стабилизатором с раскрывающимися консолями, установленными под углом к продольной оси корпуса, а также элементы стабилизации скорости вращения ракеты вокруг продольной оси, элементы стабилизации скорости вращения ракеты выполнены в виде дестабилизаторов, консоли которых установлены под углом к продольной оси корпуса и имеют несимметричный профиль за счет скосов у передних и задних кромок консолей, выполненных на поверхностях, обращенных в сторону вращения ракеты, при этом угол скоса у задней кромки каждой консоли дестабилизаторов составляет 5-12° , а отношение угла скоса у передней кромки к углу установки каждой консоли дестабилизаторов составляет 5-16.
Сущность изобретения поясняется чертежами и графиками, где
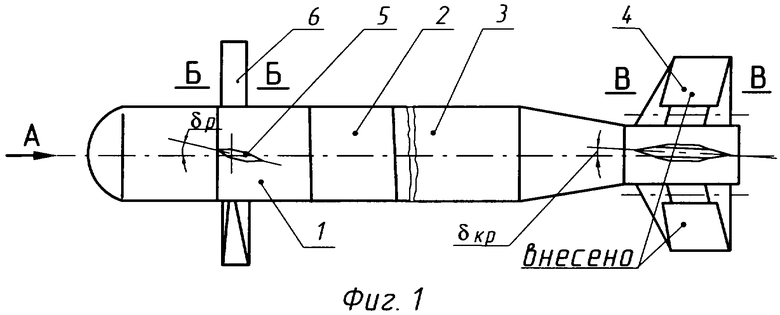
на фиг.1 изображен общий вид ракеты с оперением (геометрический чертеж);
на фиг.2 изображен вид на ракету с носа - вид А;
на фиг.3 показано поперечное сечение консоли хвостового стабилизатора;
на фиг.4 показано поперечное сечение консоли дестабилизаторов;
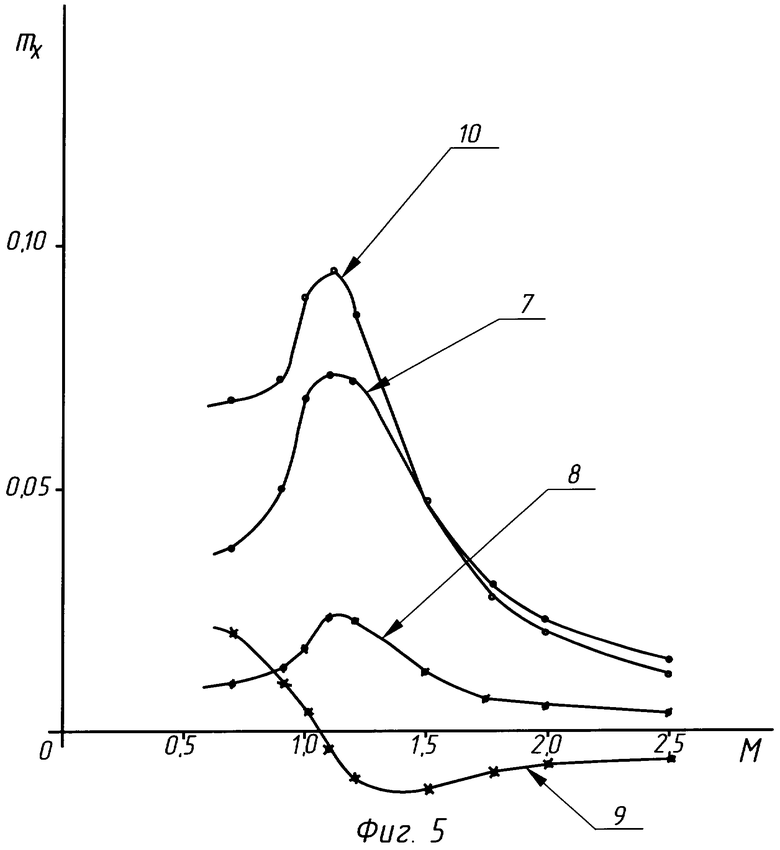
на фиг.5 приведены графики изменения коэффициентов момента крена mх ракеты и ее отдельных элементов по числам М;
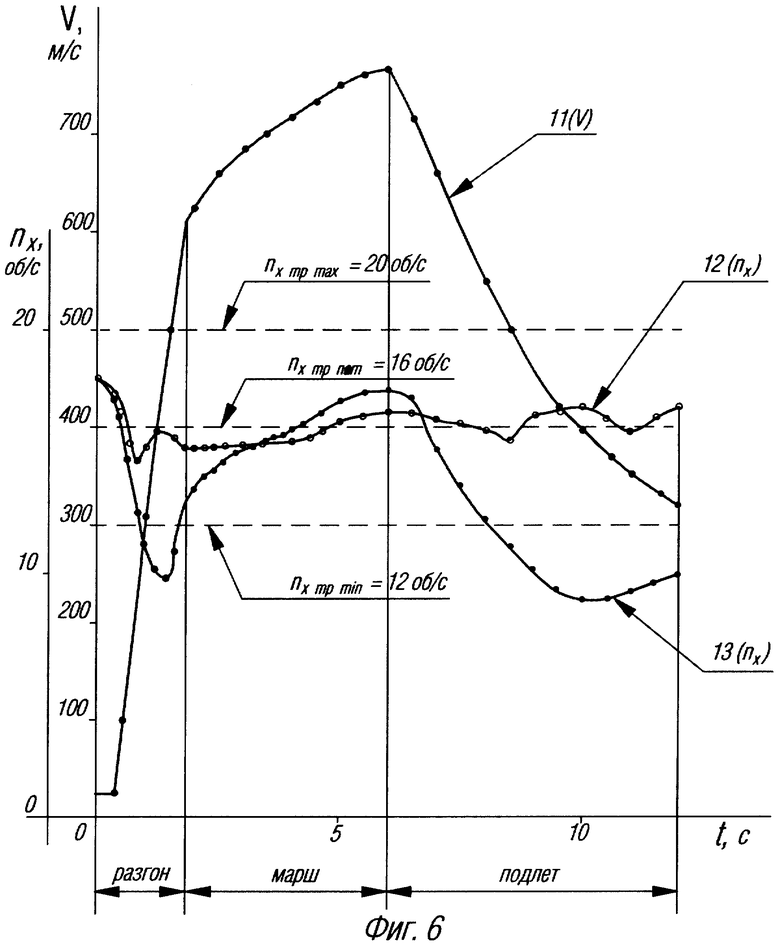
на фиг.6 показаны зависимости скорости полета V и скорости вращения вокруг продольной оси nх ракеты по времени полета t.
Предлагаемая ракета (фиг.1 и 2), скомпонованная по аэродинамической схеме “утка”, содержит корпус 1 с расположенными в нем боевым отсеком 2, реактивным двигателем 3 и хвостовым стабилизатором 4, консоли которого установлены под углом δ кр к продольной оси корпуса, при этом профиль консолей стабилизатора выполнен симметричным (фиг.3). В передней части корпуса установлены аэродинамические рули 5 рулевого привода ракеты. Две консоли рулей, связанные одной стойкой (осью), отклонены на угол δ р для создания управляющей силы, а следовательно, управляющего момента ракеты относительно ее центра масс. Т.к. система управления вращающейся ракеты одноканальная, то рулевой привод ракеты должен обладать высоким быстродействием, т.е. иметь малое время переброса рулей из одного положения в другое, противоположное по знаку.
На передней части корпуса, перпендикулярно плоскости рулей установлены дестабилизаторы 6, являющиеся элементом стабилизации скорости вращения ракеты за счет установки консолей дестабилизаторов под углом к продольной оси корпуса δ д и несимметричного трапециевидного профиля консолей, выполненного за счет скосов у передних с углом ϕ п и задних с углом δ з кромок консолей, выполненных на стороне каждой консоли, обращенной в сторону вращения ракеты (см. фиг.1 и 4). Угол скоса у задней кромки каждой консоли дестабилизаторов составляет ϕ cк.з=5-12° , а отношение угла скоса у передней кромки к углу установки консолей дестабилизаторов составляет ϕ ск.п/δ д=5-16.
Дестабилизаторы расположены на передней части корпуса, не далее чем 4 калибра от начала цилиндрической части корпуса, где толщина пограничного слоя еще мала, и в области малых и умеренных углов атаки α <15° нет условий для его отрыва в этом месте, в отличие от хвостовой части корпуса, где расположены стабилизаторы (Петров К.П. Аэродинамика ракет. М.: Машиностроение, 1977, с.27-30). Поэтому эффективность по крену консолей дестабилизаторов, установленных под углом к продольной оси корпуса и выполненных с несимметричным профилем, для управляемой ракеты, имеющей углы атаки от α =0 до α бал=6-8° , не уменьшается по углам атаки, по сравнению с эффективностью при α =0, и даже, наоборот, несколько возрастает.
Как показали эксперименты на вращающихся моделях управляемой ракеты в аэродинамических трубах, полная компоновка вращающейся модели в схеме "утка" (корпус + стабилизаторы + рули + дестабилизаторы), в которой консоли стабилизаторов с симметричным профилем имеют установочный угол относительно продольной оси корпуса, а консоли дестабилизаторов с несимметричным трапециевидным профилем имеют свой установочный угол относительно продольной оси корпуса, скорость вращения модели при α =6-8° , по сравнению со скоростью вращения при α =0, при числах М=0,6-1,3 больше на 10-20%, а при числах М>1,3 скорость вращения модели почти не меняется в диапазоне α =0-8° . Т.к. дозвуковые и трансзвуковые скорости полета (М=0,6-1,3) управляемая ракета проходит на участке разгона, полет на котором неустановившийся, то практически полет ракеты проходит с колебаниями не только по углам атаки, но и с отклонением продольной оси ракеты от мгновенной оси вращения ракеты, что несколько увеличивает момент инерции ракеты относительно мгновенной оси вращения, что снижает скорость вращения ракеты. Поэтому скорость вращения реальной управляемой ракеты, по сравнению со скоростью вращения ее модели в аэродинамической трубе, не будет иметь превышение скорости вращения на углах атаки α >0, по сравнению со скоростью вращения при α =0. На основном маршевом участке траектории полета, где скорость ракеты сверхзвуковая (М≥ 1,7) и меняется мало по времени, полет ракеты установившийся, ракета летит более спокойно, поэтому скорость вращения ракеты, как и модели, почти не меняется по углам атаки. На пассивном участке траектории полета управляемой ракеты, где полет ракеты можно считать установившимся (скорость полета V уменьшается медленно, массовые, центровочные и инерционные характеристики ракеты не меняются), при М<1,3 скорость вращения ракеты при α =6-8° может быть больше на 10-20%, чем при α =0. Такое сравнительно небольшое увеличение скорости вращения может быть компенсировано некоторым уменьшением установочного угла консолей дестабилизаторов с тем, чтобы общий диапазон изменения скорости вращения ракеты не выходил за пределы требуемой.
В предлагаемой управляемой ракете угол скоса у задней кромки каждой консоли дестабилизаторов составляет ϕ ск.з=5-12° . Максимальное значение ϕ ск.з.max=12° ограничено тем условием, чтобы поток на скосе, как на обратном клине, в диапазоне чисел М=1,77-2,2, соответствующих скорости полета ракеты на основном маршевом участке траектории, был безотрывным. Минимальное значение ϕ ск.з.min=5° ограничено конструктивными и технологическими особенностями (относительной толщиной профиля, толщиной кромок и др.).
Угол скоса у передней кромки каждой консоли дестабилизаторов связан отношением к ее установочному углу 
Максимальное отношение  определено условием, чтобы на переднем скосе, как на клине, скачок уплотнения при числах М=1,7-2,2 был присоединенным. Минимальное значение отношения
определено условием, чтобы на переднем скосе, как на клине, скачок уплотнения при числах М=1,7-2,2 был присоединенным. Минимальное значение отношения  определяется тем условием, чтобы давление на скошенной поверхности заведомо было больше, чем давление на нескошенной поверхности, установленной под углом δ д к продольной оси корпуса, а также конструктивными и технологическими особенностями консолей стабилизаторов.
определяется тем условием, чтобы давление на скошенной поверхности заведомо было больше, чем давление на нескошенной поверхности, установленной под углом δ д к продольной оси корпуса, а также конструктивными и технологическими особенностями консолей стабилизаторов.
Для стабилизации скорости вращения каждой конкретной управляемой ракеты может быть подобрана комбинация установочных углов консолей стабилизатора и дестабилизаторов и углов скоса у передней и задней кромок консолей дестабилизаторов, исходя из приведенных выше диапазонов углов скоса у кромок консолей дестабилизаторов и установочных углов консолей, с тем, чтобы диапазон изменения скорости вращения ракеты вокруг ее продольной оси был минимальным, т.е. разбросы скорости вращения относительно номинального значения были минимальными.
На фиг.5 приведены зависимости коэффициентов момента крена mх=f(М) конкретной управляемой ракеты и ее отдельных элементов: зависимость 7 - для стабилизаторов с установочным углом δ ст консолей, зависимость 8 - для дестабилизаторов с установочным углом δ д консолей, зависимость 9 - для несимметричного профиля консолей дестабилизаторов, зависимость 10 - для общего коэффициента момента крена ракеты mxΣ . При экспериментальных исследованиях характеристик вращения управляемой ракеты на моделях в аэродинамических трубах проводятся раздельные испытания, поэтому момент крена дестабилизаторов получается с учетом взаимодействия (интерференции) со стабилизаторами, т.е. учитывается момент крена “косого обдува”. Поэтому полученные составляющие коэффициенты момента крена можно складывать по принципу суперпозиции, т.е. таким образом получена зависимость 10 (mxΣ для всей ракеты).
Коэффициенты mxi и mxΣ , показанные на фиг.5 в зависимости от чисел М, приведены для нулевого угла атаки (α =0).
Из фиг.5 видно, что зависимость 9 для несимметричного профиля дестабилизаторов имеет достаточно большую эффективность по крену в сторону вращения ракеты при дозвуковых числах М, а при сверхзвуковых числах М - эффективность по крену обратного знака, т.е. тормозящий момент крена. Дополнительно по результатам испытаний модели ракеты в аэродинамических трубах можно сказать следующее: если задний скос “крутит” и на дозвуковых и на сверхзвуковых скоростях полета, то передний скос очень мало “крутит” на дозвуковых скоростях полета и тормозит вращение на сверхзвуковых скоростях за счет возрастающего при увеличении чисел М давления на поверхности скоса, как на клине, достигая общего тормозящего момента консолей за счет несимметричности профиля.
Данные по эффективности отдельных составляющих по вращению ракеты были получены из результатов испытаний аэродинамических моделей ракеты в аэродинамических трубах ЦАГИ им. Н.Е.Жуковского и Института механики МГУ им. М.В. Ломоносова. В нашем устройстве появляется возможность разработки комбинированного способа вращения ракеты, сочетая углы скосов у передней и задней кромок консолей дестабилизаторов с установочными углами консолей дестабилизаторов и стабилизаторов с тем, чтобы стабилизировать скорость вращения ракеты на всей траектории полета или, другими словами, уменьшить разбежку скорости вращения, приемлемую для системы управления ракетой. Зависимости mx=f(M) на фиг.5 демонстрируют подобранную для рассматриваемой нами ракеты ПЗРК, комбинацию значений установочных углов, углов скоса консолей дестабилизаторов около передней и задней кромок каждой консоли на поверхности, обращенной в сторону вращения ракеты.
В общем виде уравнение вращательного движения ракеты вокруг ее продольной оси можно записать следующим образом:

где Мх, Мх.демп. - момент крена и момент демпфирования по крену ракеты соответственно;
Jx - момент инерции ракеты относительно ее продольной оси;
wx,  - угловая скорость и угловое ускорение вращения соответственно;
- угловая скорость и угловое ускорение вращения соответственно;
 - безразмерная угловая скорость (число Струхаля);
- безразмерная угловая скорость (число Струхаля);
 - i-я составляющая коэффициентов момента крена и демпфирующего момента по крену соответственно;
- i-я составляющая коэффициентов момента крена и демпфирующего момента по крену соответственно;
q - скоростной напор;
s, l - характерные площадь и длина, к которым отнесены моменты по крену, как правило, s - площадь миделя, l - размах стабилизаторов;
wx=2π nх - угловая скорость вращения в рад/с;
nх - угловая скорость вращения в об/с.
В установившемся движении по крену  , тогда уравнение (1) преобразуется к виду:
, тогда уравнение (1) преобразуется к виду:

тогда 
отсюда 


где индексы “cm”, “д”, “р” обозначают соответственно стабилизаторы, дес-табилизаторы, рули;
mх.ст(δ ст), mxd(δ д), mхД н/с пр обозначают соответственно коэффициенты момента крена стабилизаторов от установочного угла δ cm, дестабилизаторов от установочного угла δ Д, дестабилизаторов от их несимметричного профиля.
Рассчитанная по уравнению (1) с использованием данных по mx=/(М) на фиг.5 скорость вращения nx ракеты показана по времени полета t на фиг.6 зависимостью 12. Диапазон изменения скорости вращения предлагаемой ракеты на всей траектории полета до конечной скорости Vк=320 м/с (М=0,94) составляет nх=14,5-18,0 об/с, что удовлетворяет требованию (nx.тp=12-20,0 об/с), т.е. суммарная разбежка составляет Δ nх=3,5 об/с.
Заметим, что разбежка скорости вращения неуправляемого снаряда, ограниченная резонансными частотами, о которых говорилось выше, во много раз больше, чем у предлагаемой ракеты. Для сравнения на фиг.6 приведена зависимость nx=f(t) кривой 13 для ракеты “Стингер”, в которой вращение создается только установочным углом консолей стабилизатора с симметричным профилем по величине таким, чтобы на основном маршевом участке (на времени t=1,8-6,0 с) скорость вращения была бы близка к номинальной (nх.ном=16 об/с). По зависимости 13 видно, что диапазон изменения скорости вращения до конечной скорости полета Vк=320 м/с (при t=12 с) составляет nх=8,9-17,6 об/с (Δ nх=8,7 об/с), что не удовлетворяет требуемой. Поэтому, если не вводить в систему управления фазорегулятор, придется ограничиться конечной скоростью полета Vк=540 м/с на времени t=8,1 с, когда nх.min=12 об/с, т.е. сократится дальность управляемого полета примерно на 1600 м, что составляет около 25% от дальности предлагаемой ракеты.
Характеристики вращения управляемой ракеты были получены с учетом результатов испытаний аэродинамических моделей (невращающихся с замером момента крена Мх и вращающихся с замером скорости вращения nх в об/с) в аэродинамических трубах ЦАГИ и Института механики МГУ. Проведенные летные испытания телеметрических вариантов ракеты: баллистических при δ р=0, программных при различных коэффициентах команды с работающим рулевым приводом, т.е. при |δ р|>0, и телеметрических управляемых с реальной головкой самонаведения при режимах управления “вдогон” и “навстречу” по различным воздушным целям показали, что данная ракета соответствует требованиям системы управления по скорости вращения вокруг продольной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сверхзвуковой вращающийся реактивный снаряд | 2023 |
|
RU2809446C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2008 |
|
RU2358233C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1998 |
|
RU2133443C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2005 |
|
RU2288436C1 |
| РАКЕТА | 1996 |
|
RU2094748C1 |
| ВРАЩАЮЩАЯСЯ РАКЕТА | 2020 |
|
RU2732370C1 |
| АВИАЦИОННАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2259536C1 |
| ВРАЩАЮЩИЙСЯ СВЕРХЗВУКОВОЙ РЕАКТИВНЫЙ СНАРЯД | 2000 |
|
RU2166178C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
Изобретение относится к области ракетной техники и может быть использовано во вращающихся управляемых ракетах, с одноканальной системой управления, имеющих широкий диапазон изменения скорости полета от дозвуковой до сверхзвуковой. Ракета содержит корпус с расположенными в нем боевым отсеком, реактивным двигателем и установленным на корпусе хвостовым стабилизатором. Консоли стабилизатора установлены под углом к продольной оси корпуса. Элементы стабилизации скорости вращения ракеты установлены вокруг ее продольной оси и выполнены в виде дестабилизаторов. Консоли дестабилизаторов установлены под углом к продольной оси корпуса. Выполнены с несимметричным профилем за счет скосов их передних и задних кромок, со стороны поверхности консоли, обращенной в сторону вращения ракеты. Угол скоса задней кромки консоли составляет 5-12°, а отношение угла скоса передней кромки к углу установки консоли дестабилизаторов составляет 5-16. Таким выполнением ракеты повышается точность ее наведения. 6 ил.
Вращающаяся управляемая ракета, содержащая корпус с расположенными в нем боевым отсеком, реактивным двигателем и установленным на корпусе хвостовым стабилизатором, консоли которого установлены под углом к продольной оси корпуса, а также элементы стабилизации скорости вращения ракеты вокруг продольной оси, выполненные в виде дестабилизаторов, отличающаяся тем, что консоли дестабилизаторов установлены под углом к продольной оси корпуса, выполнены с несимметричным профилем за счет скосов их передних и задних кромок со стороны поверхности консоли, обращенной в сторону вращения ракеты, при этом угол скоса задней кромки консоли составляет 5÷12°, а отношение угла скоса передней кромки к углу установки консоли дестабилизаторов составляет 5÷16.
| Зарубежное военное обозрение, 1991, №1, с.35-37 | |||
| УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166726C1 |
| СПОСОБ СТРЕЛЬБЫ АРТИЛЛЕРИЙСКИМ УПРАВЛЯЕМЫМ СНАРЯДОМ | 1999 |
|
RU2165589C1 |
| ИМПУЛЬСНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ЭЛЕКТРОВОСПЛАМЕНИТЕЛЬНЫХ УСТРОЙСТВ ПУСКОВЫХ И БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2168699C2 |
| US 5035169 А, 30.07.1991. | |||

