Изобретение относится к области ракетной техники и может быть использовано в различных типах ракет с комбинированным аэрогазодинамическим управлением.
Известна ракета, выполненная по аэродинамической схеме "утка", содержащая цилиндрический корпус с оживальной носовой частью, размещенные в нем двигательную установку с устройством газодинамического управления ракетой, выполненным в виде установленных на сопловой части четырех интерцептеров, боевое снаряжение и аппаратуру системы управления, расположенные на корпусе равномерно относительно его продольной оси четыре неподвижных крыла с кинематически связанными между собой четырьмя элеронами, в тандеме с крыльями четыре управляющих, соединенных попарно противоположно расположенных аэродинамических руля, четыре неподвижных дестабилизатора, установленных перед рулями, и четыре флюгерных датчика углов атаки, установленных перед дестабилизаторами ("Aviation week and Space Technology", 1995, N 10, т.143, с.25; справочник Карпенко А.В. Российское ракетное оружие 1943 1993 г.г. справочник, 1993, С-Петербург, с. 149; журнал "Military Technology", т.17, N 7, 1994, с.20).
Описанная в указанных источниках ракета имеет относительно малый поперечный транспортный габарит (крылья малого удлинения) и для обеспечения высоких маневренных характеристик ракета требует реализации ее полета на больших углах атаки.
В качестве прототипа изобретения принята ракета, описанная в журнале "Military Technology".
Согласно ее описанию маневренные характеристики ракеты обеспечиваются использованием газодинамического устройства управления и установкой дестабилизаторов перед аэродинамическими рулями.
Вместе с тем отсутствие в описании аналогов изобретения сведений о геометрических размерах корпуса, крыльев с элеронами, рулей и дестабилизаторов ракеты и их взаимного расположения не позволяет судить о возможности увеличения маневренных характеристик ракеты при определенных соотношениях этих параметров.
В качестве технического результата, достигаемого при использовании изобретения следует указать возможность достижения больших углов атаки ракеты на активном (до примерно 40o) и пассивном (до примерно 30o) участках траектории полета ракеты и, следовательно, повышение маневренных ее характеристик.
Указанный технический результат достигается тем, что в ракете, выполненной по аэродинамической схеме "утка", содержащей цилиндрический корпус с оживальной носовой частью, размещенные в нем двигательную установку с устройством газодинамического управления ракетой, выполненным в виде установленных на сопловой части четырех интерцептеров, боевое снаряжение и аппаратуру системы управления, расположенные на корпусе равномерно относительно его продольной оси четыре неподвижных крыла, с кинематически связанными между собой четырьмя элеронами, в тандеме с крыльями четыре управляющих, соединенных попарно противоположно расположенных аэродинамических руля; четыре неподвижных дестабилизатора, установленных перед рулями и четыре флюгерных датчика углов атаки, установленных перед дестабилизаторами, корпус, крылья, рули, дестабилизаторы, элероны выполнены таким образом, что имеют следующие соотношения собственных размеров и взаимное расположение на корпусе ракеты:
l1= (9.10) dk;
l2= (2.3) dk;
Lд= (0,4.0,6)Lp;
l3= (0,01.1,5)dк;
где dк диаметр корпуса ракеты, м;
λк удлинение корпуса ракеты;
Lк длина корпуса ракеты, м; относительная площадь крыла;
относительная площадь крыла;
Sкр площадь крыла, м2;
Sм площадь мидели корпуса ракеты, м2;
λкр удлинение крыла;
Lкр размах крыла, м;
ηкр сужение крыла;
bокр бортовая хорда крыла,м;
bkкр концевая хорда крыла, м; относительная площадь 4-х элеронов;
относительная площадь 4-х элеронов;
Sэл площадь 4-х элеронов, м2;
l1 расстояние от оси вращения руля до начала бортовой хорды крыла, м; относительная площадь руля;
относительная площадь руля;
Sp площадь руля, м2;
λp удлинение руля;
Lр размах руля, м;
ηp сужение руля;
bор бортовая хорда руля, м;
bкр концевая хорда руля, м;
l2 расстояние от носка ракеты до оси вращения руля, м; относительная площадь дестабилизатора;
относительная площадь дестабилизатора;
Sд площадь дестабилизатора, м2;
Lд размах дестабилизатора, м;
lз расстояние между задней кромкой дестабилизатора и передней кромкой руля, м.
Ракета в начале полета статически неустойчива и удерживается на заданном угле атаки с помощью аэродинамических рулей и газодинамического устройства управления ракетой, изменяющего направление вектора тяги двигателя (максимальный заданный угол атаки приблизительно 40o ограничивается располагаемой эффективностью элеронов: на углах атаки больше приблизительно 40o элероны не обеспечивают стабилизацию ракеты по крену).
На пассивном участке полета (после выгорания топлива двигателя и перемещения центра тяжести ракеты вперед) ракета становится статически устойчивой.
Небольшой запас статической устойчивости ракеты за счет выбранных геометрических соотношений крыла и руля позволяет обеспечить выход ракеты на углы атаки до 30o только аэродинамическими рулями с относительно небольшой площадью (площадь двух рулей ≈ площади миделя корпуса).
Выбранные соотношения размеров рулей и дестабилизаторов и их взаимное раcположение обеспечивают повышенную эффективность рулей на больших углах атаки за счет оптимизации скоса потока дестабилизаторов, уменьшающего местные углы атаки рулей.
Срыв потока на рулях при наличии дестабилизаторов при предлагаемых соотношениях размеров и взаимном раcположении элементов ракеты происходит на углах атаки ракеты, больших на 10-30% чем без них (или за их пределами) и зависит от скорости полета ракеты.
Использование изобретения обеспечивает поражение воздушных целей, в том числе высокоманевренных истребителей и штурмовиков с любых направлений.
Предлагаемые согласно изобретению диапазоны геометрических параметров получены по результатам практических экспериментальных исследований ракет различной геометрии в аэродинамических трубах, подтвержденным данными летных испытаний.
Ракета с данными соотношениями геометрических размеров обеспечивает высокие маневренные характеристики во всем диапазоне ее применения.
Максимальный угол атаки на активном участке полета ракеты составляет приблизительно αmax 40o. (На углах атаки, превышающих приблизительно 40o, элероны не обеспечивают стабилизацию ракеты по крену).
На пассивном участке полета максимальный угол атаки αmax приблизительно 30o. При выходе за пределы соотношений геометрических размеров ракеты теряются ее маневренные возможности за счет увеличения ее начальной устойчивости. В этом случае ее маневренные характеристики на пассивном участке полета могут быть сохранены только за счет значительного увеличения площади рулей.
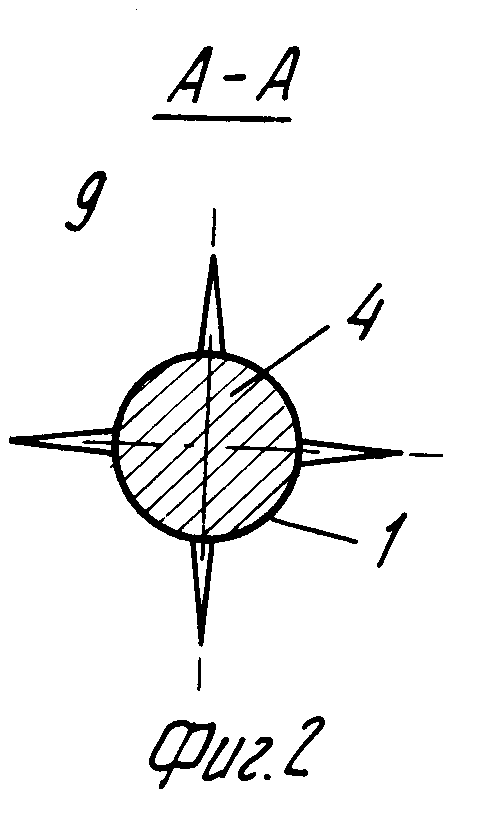
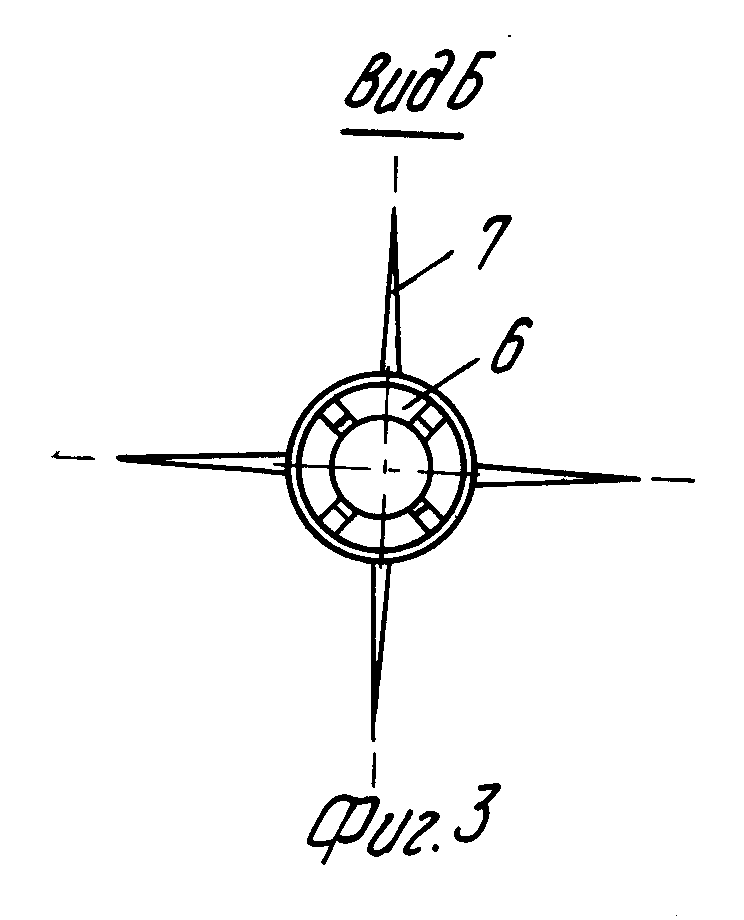
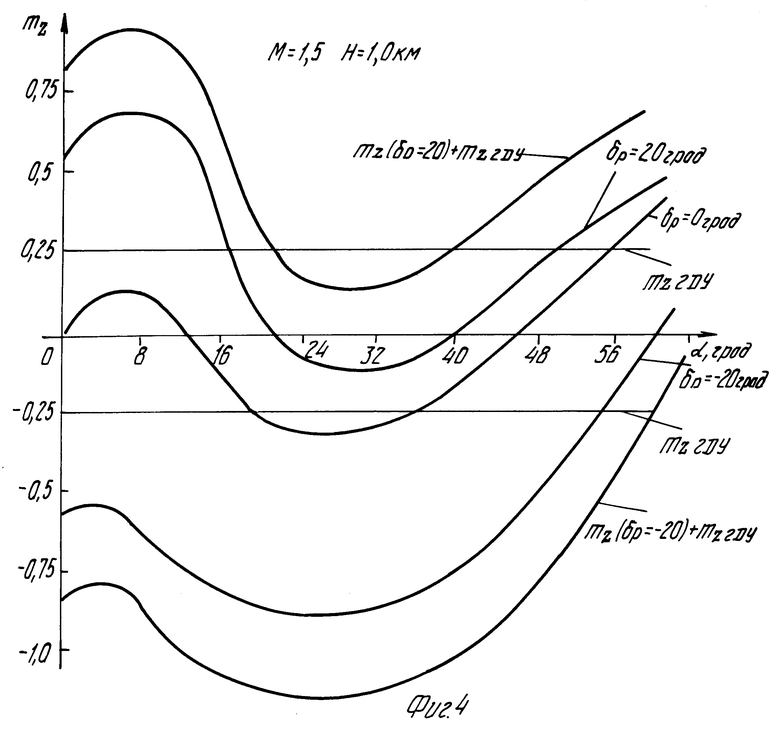
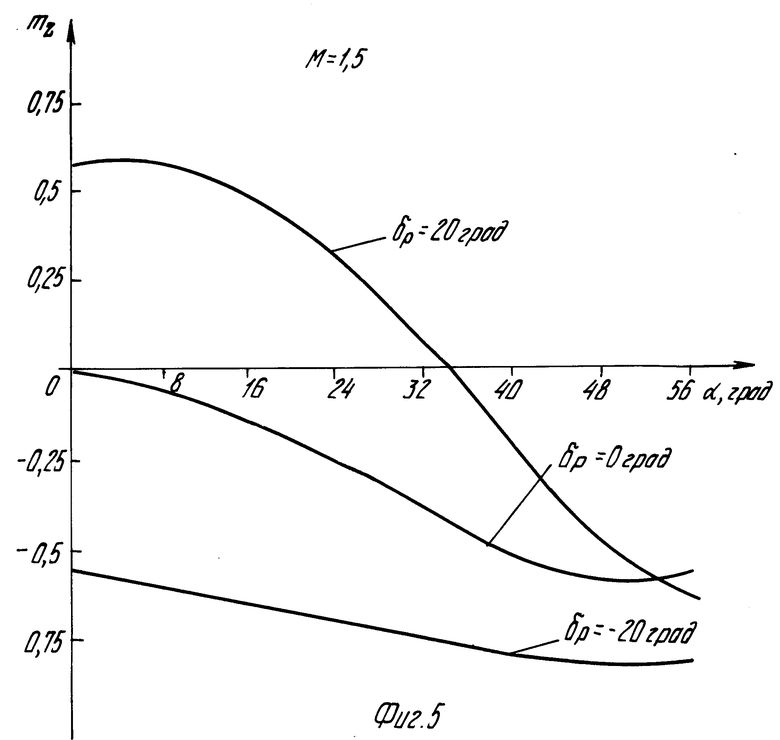
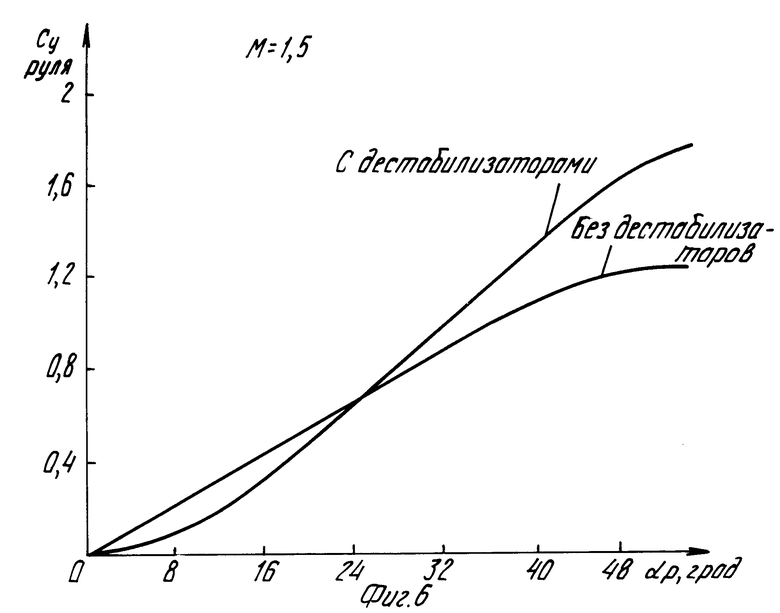
На фиг. 1 изображен общий вид ракеты; на фиг. 2 сечение А-А на фиг.1; на фиг. 3 вид Б на фиг.1; на фиг. 4 графическое изображение зависимости коэффициента аэродинамического момента тангажа mz от угла атаки α в начале активного участка полета ракеты; на фиг. 5 графическое изображение зависимости коэффициента аэродинамического момента тангажа mz от угла атаки a на пассивном участке полета ракеты; на фиг. 6 графическое изображение зависимости коэффициента аэродинамической нормальной силы руля от угла атаки a при наличии дестабилизаторов и без них.
Ракета согласно изобретению содержит цилиндрический корпус 1, включающий передний обтекатель 2 оживальной форма. Внутри корпуса 1 размещена аппаратура системы управления 3, боевое снаряжение 4 и двигательная установка 5 с устройством газодинамического управления ракетой в виде установленных на сопловой части ракеты четырех интерцептеров 6.
Ракета выполнена по аэродинамической схеме "утка", в соответствии с которой на корпусе 1 размещены четыре крыла 7 с кинематически связанными между собой четырьмя элеронами 8 и четыре соединенных попарно противоположно расположенных аэродинамических руля 9. Ракета оснащена четырьмя дестабилизаторами 10, установленными перед рулями 9, четырьмя флюгерными датчиками углов атаки 11, установленными перед дестабилизаторами 10.
Ракета согласно изобретению выполнена со следующими соотношениями размеров корпуса, крыльев, рулей, элеронов и дестабилизаторов и их взаимным расположением:

l1= (9.10)dк;
l2= (2.3)dк;
Lд= (0,4.0,6)Lр;
lз= (0,01.1,5)dк;
где dк диаметр корпуса ракеты, м;
λк удлинение корпуса ракеты;
Lк длина корпуса ракеты, м; относительная площадь крыла;
относительная площадь крыла;
Sкр площадь крыла, м2;
Sм площадь миделя корпуса ракеты, м2;
λкр удлинение крыла;
Lкр размах крыла, м;
ηкр cужение крыла;
boкр бортовая хорда крыла, м;
bkкр концевая хорда крыла, м; относительная площадь 4-х элеронов;
относительная площадь 4-х элеронов;
Sэл площадь 4-х элеронов м2;
l1 расстояние от оси вращения руля до начала бортовой хорды крыла, м; относительная площать руля;
относительная площать руля;
Sp площадь руля, м2;
λp удлинение руля;
Lp размах руля, м;
ηp сужение руля;
boр бортовая хорда руля, м;
bkp концевая хорда руля, м;
l2 расстояние от носка ракеты до оси вращения руля, м; относительная площадь дестабилизатора;
относительная площадь дестабилизатора;
Sд площадь дестабилизатора, м2;
Lд размах дестабилизатора, м;
lз расстояние между задней кромкой дестабилизатора и передней кромкой руля, м.
Ракеты, обеспечивающие малый поперечный транспортный габарит, имеют крылья малого удлинения и относительно малой площади. Для получения высоких маневренных характеристик таких ракет требуется реализация возможности полета на больших углах атаки.
Рассматриваемой ракете присущи следующие аэродинамические особенности, затрудняющие реализацию ее полета на больших углах атаки:
значительное изменение степени аэродинамической статической устойчивости ракеты при переходе от активного участка полета на пассивный;
большие местные углы атаки на рулях и элеронах;
выбор соотношения размеров рулей, крыльев, дестабилизаторов, элеронов и корпуса ракеты в целом в указанных выше диапазонах при использовании двигательной установки с устройством газодинамического управления ракетой позволяет компенсировать негативное влияние отмеченных выше особенностей компановки ракеты.
Маневрирование на больших углах атаки позволяет обеспечить высокий уровень поперечных перегрузок во всем диапазоне условий применения ракеты.
Приведенные в качестве примера зависимости (фиг. 4-6) взяты для ракеты с наиболее оптимальными соотношениями геометрических параметров ее несущих поверхностей и корпуса. Для расчета аэродинамических характеристик приняты средние значения приведенных диапазонов и наиболее характерные для данного типа ракеты скорость и высота полета (М 1,5; Н 1,0 км).
Коэффициент момента тангажа от боковой газодинамической силы  определяется по следующей формуле:
определяется по следующей формуле:
где p боковая газодинамическая сила, кг;
g скоростной напор на Н 1,0 км и М 1,5; кг/м2;
l расстояние между точкой приложения боковой газодинамической силы и центром тяжести ракеты, м.
Коэффициент нормальной аэродинамической силы Суруля, приведенный на графике фиг. 6, отнесен к собственной площади руля, а угол атаки руля, приведенный на том же графике, αp= α+δp, где δp угол отклонения руля ( 20o).
20o).
Как видно из графиков δp 0o; δp/ 20o; δp -20o на фиг. 4 ракета статически неустойчива и без газодинамического устройства управления вектором тяги двигателя на углах атаки, превышающих 20o, ракете становится неуправляемой.
При использовании аэрогазодинамического управления (графики на фиг. 4)
обеспечивается достижение углов атаки до приблизительно 60o.
Из-за недостаточной эффективности элеронов (на углах атаки более приблизительно 40o элероны не обеспечивают стабилизацию ракеты по крену) максимальный угол атаки для ракеты ограничен углом 40o.
Во время полета осуществляется постоянный контроль текущего значения угла атаки посредством датчиков углов атаки, информация от которых поступает в систему управления ракетой.
На графике δp 0o, δp 20o и δp -20o (фиг. 5) приведены моментные характеристики ракеты на пассивном участке ее полета. Как видно из приведенных графиков вывод ракеты обеспечивается на углы до 30-32o.
Из графиков, приведенных на фиг. 6, видно, что на максимальных углах атаки  коэффициент аэродинамической нормальной силы на 20-30% больше у руля, перед которым установлен дестабилизатор.
коэффициент аэродинамической нормальной силы на 20-30% больше у руля, перед которым установлен дестабилизатор.
Таким образом, ракета с предлагаемыми соотношениями геометрических размеров обеспечивает высокие маневренные характеристики во всем диапазоне ее применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТА, ВЫПОЛНЕННАЯ ПО АЭРОДИНАМИЧЕСКОЙ СХЕМЕ "УТКА" | 1997 |
|
RU2111446C1 |
| АВИАЦИОННАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2259536C1 |
| РАКЕТА | 2005 |
|
RU2272984C1 |
| РАКЕТА | 1995 |
|
RU2085826C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1998 |
|
RU2135946C1 |
| РАКЕТА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 1996 |
|
RU2096734C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2007 |
|
RU2341762C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045741C1 |
| РЕШЕТЧАТАЯ АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ | 1995 |
|
RU2085440C1 |
| РАКЕТА | 2005 |
|
RU2283471C1 |
Использование: ракетная техника, ракеты высокой маневренности. Сущность изобретения: в ракете, выполненной по аэродинамической схеме утка, содержащей цилиндрический корпус с оживальной носовой частью, размещенные в нем двигательную установку с устройством газодинамического управления ракетой, выполненным в виде установленных на сопловой части четырех интерцептров, боевое снаряжение и аппаратуру системы управления, расположенные на корпусе равномерно относительно его продольной оси четыре неподвижных крыла с кинематически связанными между собой четырьмя элеронами, в тандеме с крыльями четыре управляющих, соединенных попарно противоположно расположенных аэродинамических руля, четыре неподвижных дестабилизатора, установленных перед рулями и четыре флюгерных датчика углов атаки, установленные перед дестабилизаторами, корпус, крылья, рули, дестабилизаторы и элероны выполнены таким образом, что имеют соотношения размеров и взаимное расположение, приведенные в описании изобретения. 6 ил.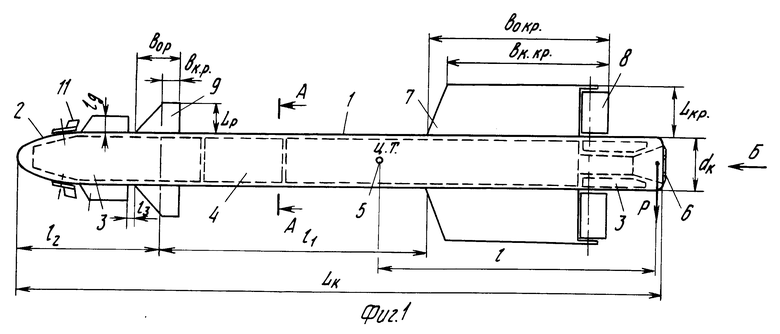
Ракета, выполненная по аэродинамической схеме "Утка", содержащая цилиндрический корпус с оживальной носовой частью, размещенные в нем двигательную установку с устройством газодинамического управления ракетой, выполненным в виде установленных на сопловой части четырех интерцепторов, боевое снаряжение и аппаратуру системы управления, расположенные на корпусе равномерно относительно его продольной оси четыре неподвижных крыла с кинематически связанными между собой четырьмя элеронами, в тандеме с крыльями четыре управляющих, соединенных попарно, противоположно расположенных аэродинамических руля, четыре неподвижных дестабилизатора, установленных перед рулями, и четыре флюгерных датчиков углов атаки, установленных перед дестабилизаторами, отличающаяся тем, что корпус, крылья, рули, дестабилизаторы и элероны выполнены со следующими соотношениями размеров и взаимным расположением:
l1 (9 10) x dк;
l2 (2 3) x dк;
Lд (0,4 0,6)Lp;
l3 (0,01 1,5)dк;
где λк удлинение корпуса ракеты;
Lк длина корпуса ракеты, м;
dк диаметр корпуса ракеты, м; относительная площадь крыла;
относительная площадь крыла;
Sк р площадь крыла, м2;
Sм площадь миделя корпуса ракеты, м2;
λкр - удлинение крыла;
Lк р размах крыла, м;
ηкр - сужение крыла;
bок р бортовая хорда крыла, м;
bкк р концевая хорда крыла, м; относительная площадь четырех элеронов;
относительная площадь четырех элеронов;
Sэ л площадь четырех элеронов, м2;
l1 расстояние от оси вращения руля до начала бортовой хорды крыла, м; относительная площадь руля;
относительная площадь руля;
Sр площадь руля, м2;
λp - удлинение руля;
Lр размах руля, м;
ηp - сужение руля;
bор бортовая хорда руля, м;
bк р концевая хорда руля, м;
l2 расстояние от носка ракеты до оси вращения руля, м; относительная площадь дестабилизатора;
относительная площадь дестабилизатора;
Sд площадь дестабилизатора, м2;
Lд размах дестабилизатора, м;
l3 расстояние между задней кромкой дестабилизатора и передней кромкой руля, м.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Журнал "Military Techology", Бонн (Германия), Moneh Publishing Group, т.17, N 7, 1994, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |

