Изобретение относится к ракетной технике и может быть использовано в различных типах ракет с аэродинамическим управлением и требованием иметь на ракете примерно одинаковые балансировочные характеристики при разных по форме ее носовых частях, например, со сменными головками самонаведения разного типа.
Известная ракета, выполненная по аэродинамической схеме "утка", содержащая корпус с двумя вариантами носовых частей, размещенные в нем двигательную установку, боевую часть, аппарату системы управления, расположенные на корпусе равномерно относительно его продольной оси четыре неподвижных крыла с кинематически связанными между собой четырьмя элеронами, в тандеме с крыльями - четыре управляющих, соединенных попарно и противоположно расположенных аэродинамических руля, четыре неподвижных дестабилизатора, установленных перед рулями [1, 2].
Эта ракета является прототипом изобретения, представляет собой авиационную управляемую ракету класса "воздух-поверхность" и имеет цилиндрический корпус, аэродинамические рули и крылья с элеронами. Корпус и крылья являются основными элементами, создающими подъемную силу. Носовая часть ракеты в зависимости от типа головки самонаведения может иметь форму оживала, заканчивающегося полусферической поверхностью (телевизионная головка самонаведения) или форму двухступенчатого конуса с изломом образующей, заканчивающегося полусферической поверхностью (лазерная головка самонаведения), при этом ракета с такими формами выполнения носовой часть имеет разную массу и разное положение центра тяжести.
Ракета может иметь и другие разновидности выполнения носовой части.
Однако следует отметить, что в известной ракете замена носовой части (головки самонаведения) в общем случае влечет за собой изменение аэродинамических ее параметров, что затрудняет управление ракетой. В описании указанных выше аналогов отсутствуют сведения о возможных приемах и средствах обеспечения равных и высоких аэродинамических параметров, в том числе и балансировочных характеристик, при смене головок самонаведения (носовой части) ракеты.
В описании аналогов изобретения отсутствуют сведения о геометрических размерах корпуса, крыльев, элеронов, рулей, дестабилизаторов ракеты и их взаимного расположения, массе головных частей, центре тяжести ракеты, что не позволяет судить об эффективности установленных перед рулями дестабилизаторов и возможности получения одинаковых и в то же время оптимальных балансировочных характеристик при различных по форме носовых частей ракеты.
В качестве технического результата, достигаемого при использовании изобретения, следует указать: возможность получения одинаковых балансировочных характеристик ракеты вне зависимости от формы и массы ее носовой части, представляющей собой головки самонаведения разного типа; уменьшение площади аэродинамических рулей за счет повышения их эффективности.
Указанный технический результат в варианте изобретения с носовой частью в форме оживала достигается тем, что в ракете, выполненной по аэродинамической схеме "утка", содержащей корпус с носовой частью в форме оживала, заканчивающейся полусферической поверхностью, размещенные в корпусе двигательную установку, боевую часть, аппаратуру системы управления, расположенные на корпусе равномерно относительно его продольной оси четыре неподвижных крыла с кинематически связанными между собой четырьмя элеронами, в тандеме с крыльями - четыре управляющих, соединенных попарно и противоположно расположенных аэродинамических руля, четыре неподвижных дестабилизатора, установленных перед рулями, в соответствии с изобретением носовая часть выполнена сменной, а корпус, дестабилизаторы, крылья, элероны, рули выполнены и взаимно расположены с соблюдением следующих зависимостей:
l1 = (3 - 4) dk;
ηp= 7-8;
l2 = (1,5 - 2) dk;
Lд = (0,4 - 0,5) Lр;
l3 = (0,01 - 0,2) dk;
где Xто - расстояние от носка до центра тяжести ракеты, м; относительное положение центра тяжести ракеты, % Lk;
относительное положение центра тяжести ракеты, % Lk;
Lk - длина корпуса ракеты, м;
λk- - удлинение корпуса ракеты;
dk - диаметр корпуса ракеты, м; относительная площадь одного крыла;
относительная площадь одного крыла;
S1kp - площадь одного крыла, м2;
Sм - площадь миделя корпуса ракеты, м2;
λkp- удлинение крыла;
Lkp - размах крыла, м;
ηkp- служение крыла;
bokp - бортовая хорда крыла, м;
bkkp - концевая хорда крыла, м; относительная площадь четырех элеронов;
относительная площадь четырех элеронов;
S4эл - площадь четырех элеронов, м2;
l1 - расстояние от оси вращения руля до начала бортовой хорды крыла, м; относительная площадь одного руля;
относительная площадь одного руля;
S1p - площадь одного руля, м2;
λp- удлинение руля;
Lp - размах руля, м;
ηp- сужение руля;
bop - бортовая хорда руля, м;
bkp - концевая хорда руля, м;
l2 - расстояние от носка ракеты до оси вращения руля, м; относительная площадь одного дестабилизатора;
относительная площадь одного дестабилизатора;
Lд - размах дестабилизатора, м;
l3 - расстояние между задней кромкой дестабилизатора и передней кромкой руля, м.
В варианте изобретения с носовой частью в форме двухступенчатого конуса указанный технический результат достигается тем, что в ракете, выполненной по аэродинамической схеме "утка", содержащей корпус со сменной носовой частью в форме двухступенчатого конуса с изломом образующей и заканчивающегося полусферической поверхностью, размещенные в корпусе двигательную установку, боевую часть, аппаратуру системы управления, расположенные на корпусе равномерно относительно его продольной оси четырех неподвижных крыла с кинематически связанными между собой четырьмя элеронами, в тандеме с крыльями - четыре управляющих, соединенных попарно и противоположно расположенных аэродинамических руля, четыре неподвижных дестабилизатора, установленных перед рулями, в соответствии с изобретением носовая часть выполнена сменной, а корпус, дестабилизаторы, крылья, элероны, рули выполнены и взаимно расположены с соблюдением следующих зависимостей:
l1 = (3 - 4) dk;
ηp= 7-8;
l2 = (1,5 - 2) dk; ;
;
Lд = (0,2 - 0,3) Lр;
l3 = (0,25 0 0,35) dk;
где Xто - расстояние от носка до центра тяжести ракеты, м; относительное положение центра тяжести ракеты, % Lk;
относительное положение центра тяжести ракеты, % Lk;
Lk - длина корпуса ракеты, м;
λk- удлинение корпуса ракеты;
dk - диаметр корпуса ракеты, м; относительная площадь одного крыла;
относительная площадь одного крыла;
S1kp - площадь одного крыла, м2;
Sм - площадь миделя корпуса ракеты, м2;
λkp- удлинение крыла;
Lkp - размах крыла, м;
ηkp- служение крыла;
bokp - бортовая хорда крыла, м;
dkkp - концевая хорда крыла, м; относительная площадь четырех элеронов;
относительная площадь четырех элеронов;
S4эл - площадь четырех элеронов, м2;
l1 - расстояние от оси вращения руля до начала бортовой хорды крыла, м; относительная площадь одного руля;
относительная площадь одного руля;
S1p - площадь одного руля, м2;
λp- - удлинение руля;
Lp - размах руля, м;
ηp- - сужение руля;
bop - бортовая хорда руля, м;
bkp - концевая хорда руля, м;
l2 - расстояние от носка ракеты до оси вращения руля, м; - относительная площадь одного дестабилизатора;
- относительная площадь одного дестабилизатора;
Lд - размах дестабилизатора, м;
l3 - расстояние между задней кромкой дестабилизатора и передней кромкой руля, м.
Выбранные соотношения геометрических размеров крыльев, элеронов рулей и дестабилизаторов и их взаимное расположение обеспечивают, с одной стороны, аэродинамические характеристики, не зависящие от формы носовой части ракеты, а с другой стороны - повышенную эффективность рулей на больших углах атаки за счет оптимизации скоса потока от дестабилизаторов, уменьшающего местный угол атаки рулей.
Срыв потока на рулях при наличии дестабилизаторов при предлагаемых соотношениях размеров и взаимном расположении элементов ракеты происходит на углах атаки ракеты, больших на 10-30%, чем без них (или за их пределами), и зависит от скорости полета ракеты.
Использование изобретения обеспечивает реализацию специальных траекторий полета (обеспечивающих подход ракеты к цели под углом 75-90o) и поражение наземных целей с любых направлений.
Предлагаемые согласно изобретению диапазоны геометрических параметров получены по результатам практических экспериментальных исследований в аэродинамических трубах, подтверждены данными летных испытаний.
Ракета с указанными соотношениями геометрических размеров обеспечивает потребные маневренные характеристики во всем диапазоне ее применения.
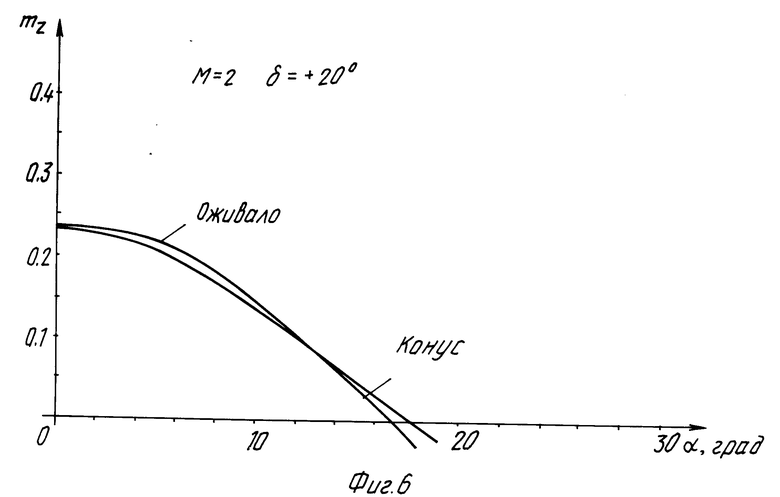
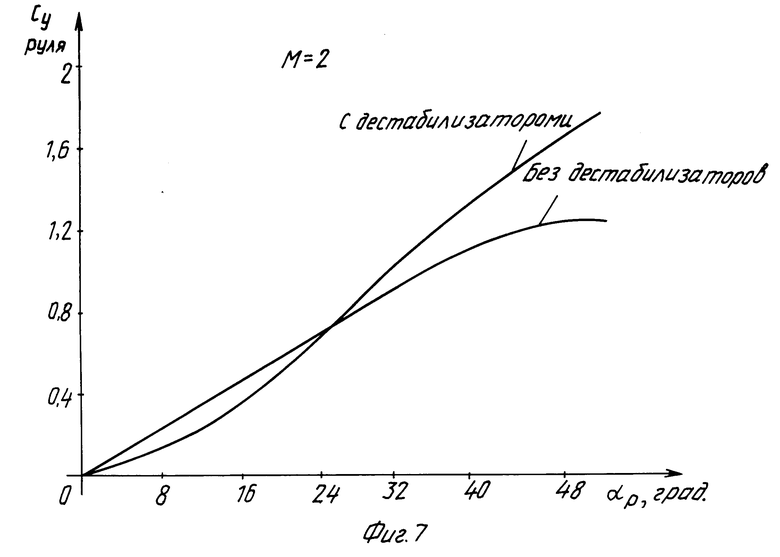
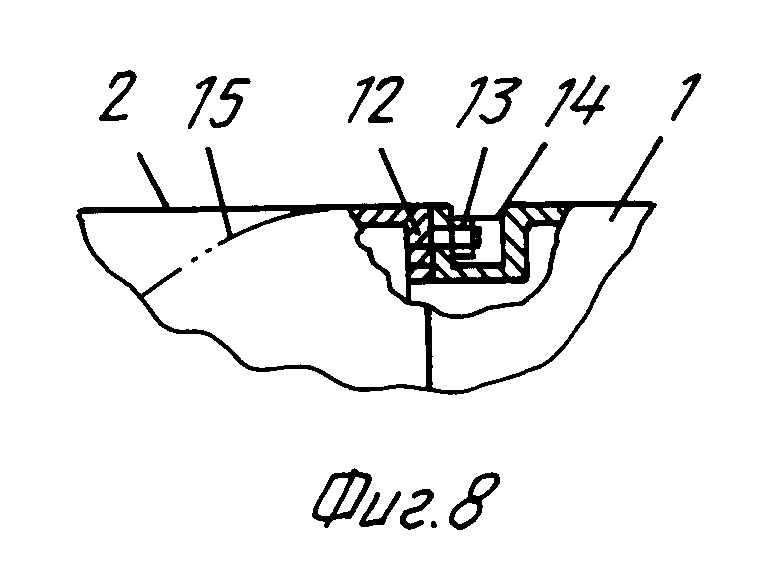
На фиг. 1 изображен общий вид ракеты с носовой частью в виде оживала, заканчивающегося полусферической поверхностью с радиусом примерно 0,8 от радиуса корпуса (вариант изобретения с носовой частью в форме оживала); на фиг. 2 - общий вид ракеты с носовой частью в виде двухступенчатого конуса с изломом образующей и заканчивающейся полусферической поверхностью с радиусом примерно 0,37 от радиуса корпуса (вариант изобретения с носовой частью в форме двухступенчатого конуса); на фиг. 3 - сечение А-А по фиг. 1; на фиг. 4 - сечение Б-Б по фиг. 1; на фиг. 5 - графическое изображение зависимости коэффициента аэродинамического момента тангажа mz от угла атаки α для ракеты без дестабилизаторов с двумя вариантами носовых частей при отклоненном руле на δ=+20o; на фиг. 6 - графическое изображение зависимости коэффициента аэродинамического момента тангажа mz от угла атаки α для ракеты с дестабилизатором для двух вариантов выполнения носовых частей при отклоненном руле на δ=+20o; на фиг. 7 - графическое изображение зависимости коэффициента аэродинамической нормальной силы руля от угла атаки α при наличии дестабилизаторов и без них для двух вариантов выполнения носовых частей ракеты; на фиг. 8 - стыковочные элементы, обеспечивающие стыковку цилиндрического корпуса ракеты с носовой частью любого из вариантов исполнения.
Ракета согласно изобретению содержит цилиндрический корпус 1, с которым соединена носовая часть 2 (передний обтекатель) в форме оживала (вариант ракеты с телевизионной головкой самонаведения), фиг. 1.
Ракета с носовой частью в виде двухступенчатого конуса 3 (вариант ракеты с лазерной головкой самонаведения) представлена на фиг. 2.
Внутри корпуса 1 размещены аппаратура управления 4, боевая часть 5 и двигательная установка 6. Ракета выполнена по аэродинамической схеме "утка", в соответствии с которой на корпусе 1 размещены четыре крыла 7 с кинематически связанными между собой четырьмя элеронами 8 и четыре соединенных попарно и противоположно расположенных аэродинамических руля 9. Ракета оснащена четырьмя дестабилизаторами 10, установленными перед рулями 9 на носовой части (фиг. 1), или четырьмя дестабилизаторами 11 в варианте ракеты с конусной носовой частью (фиг. 2).
Соединение носовой части 2 с корпусом 1 ракеты осуществляется при помощи фланца со шпильками 12, установленными по окружности на носовой части 2, и гаек 13, размещенных в карманах 14 корпуса 1 (фиг. 8). Такое соединение используется для стыковки носовой части, включающей телевизионную головку самонаведения.
Для стыковки с корпусом ракеты носовых частей, представляющих собой иные головки самонаведения, которые по длине, диаметру и массе меньше телевизионных головок самонаведения, используется переходной отсек 15, который имеет задний стыковочный фланец, аналогичный фланцу носовой части 2 с телевизионной головкой самонаведения, а передний стыковочный фланец соответствует стыковочным элементам других типов головок самонаведения, например, лазерной головки самонаведения (детально не показаны).
Примером ракеты с телевизионной головкой самонаведения является ракета, имеющая следующие параметры:
Lk = 3,875 м
λk=10,2
λkp= 0,35
ηkp= 3,44
l1 = 3,53 dk; dk = 0,38 м
l1 = 3,53 • 0,38 = 1,34 м
λp= 0,88
ηp= 7,49
l2 = 1,84 dk = 1,84 • 0,38 = 0,7 м
lp = 0.206 м
Lд = 0,436 Lp = 0,436 • 0,206 = 0,09 м
l3 = 0,013 dk = 0,013 • 0,38 = 0,005 м
Примером ракеты с лазерной головкой самонаведения является ракета, имеющая следующие параметры:
Lk = 3,875 м
λk=10,2
λkp= 0,35
ηkp= 3,44
l1 = 3,53 dk; dk = 0,38 м
l1 = 3,53 • 0,38 = 1,34 м
λp= 0,88
ηp= 7,49
l2 = 1,84 • dk = 1,84 • 0,38 = 0,7 м
Lp = 0.206 м
Lд = 0,267 • Lp = 0,267 • 0.206 = 0,055 м
l3 = 0,69 • dk = 0,69 • 0,38 = 0,263 м
Указанные соотношения геометрических размеров рулей, крыльев, дестабилизаторов, элеронов и корпуса ракеты и их взаимное расположение позволяют компенсировать негативное влияние таких особенностей ракеты, как значительное изменение балансировочных характеристик ракеты в зависимости от формы носовой части и центра тяжести ракеты; большие местные углы атаки на рулях.
Приведенные в качестве примера зависимости (фиг. 5, 6, 7) взяты для ракеты с наиболее оптимальными соотношениями геометрических параметров ее несущих поверхностей и корпуса.
Для расчета аэродинамических характеристик приняты средние значения приведенных диапазонов и наиболее характерные для данного типа ракеты скорость и высота полета (M = 2 и H = 5 км).
Как видно из графиков фиг. 5, при выполнении носовой части в виде оживала или двухступенчатого конуса балансировочные углы атаки α ракеты с носовой частью в виде оживала сильно отличаются от балансировочных углов атаки α ракеты, носовая часть которой выполнена конусной.
Из графиков на фиг. 6 видно, что ракета в соответствии с вариантами изобретения (носовая часть в виде оживала или конуса), со специально подобранными дестабилизаторами имеет примерно одинаковые балансировочные характеристики (независимо от формы носовой части и центра тяжести ракеты).
Из графиков, приведенных на фиг. 7, видно, что на максимальных углах атаки α коэффициент аэродинамической нормальной силы на 20-30% больше у руля, перед которым установлен дестабилизатор.
Таким образом, ракета с указанными соотношениями геометрических размеров обеспечивает потребные маневренные характеристики во всем диапазоне ее применения независимо от той или иной формы носовой части и типа головки самонаведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТА | 1996 |
|
RU2094748C1 |
| АВИАЦИОННАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2259536C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2007 |
|
RU2341762C1 |
| РАКЕТА | 2005 |
|
RU2272984C1 |
| РАКЕТА | 1995 |
|
RU2085826C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288435C1 |
| РАКЕТА | 2005 |
|
RU2276321C1 |
| КОРРЕКТИРУЕМАЯ, САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 1999 |
|
RU2156954C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2007 |
|
RU2354922C1 |

Ракета выполнена по аэродинамической схеме "утка". В корпусе ракеты размещены двигательная установка, боевая часть и аппаратура системы управления. На корпусе расположены четыре неподвижных крыла с элеронами, в тандеме с ними - четыре соединенных попарно аэродинамических руля, перед которыми установлены четыре неподвижных дестабилизатора. По первому варианту носовая часть корпуса выполнена в форме оживала, а по второму - в форме двухступенчатого конуса с изломом образующей. В обоих вариантах носовые части являются сменными и заканчиваются полусферическими поверхностями. В каждом варианте корпус, дестабилизаторы, крылья, элероны, рули выполнены и взаимно расположены с соблюдением зависимостей, соответствующих этому варианту ракеты. Оба варианта ракеты имеют примерно одинаковые аэродинамические характеристики и повышенную эффективность рулей на больших углах атаки. 2 с.п. ф-лы, 8 ил.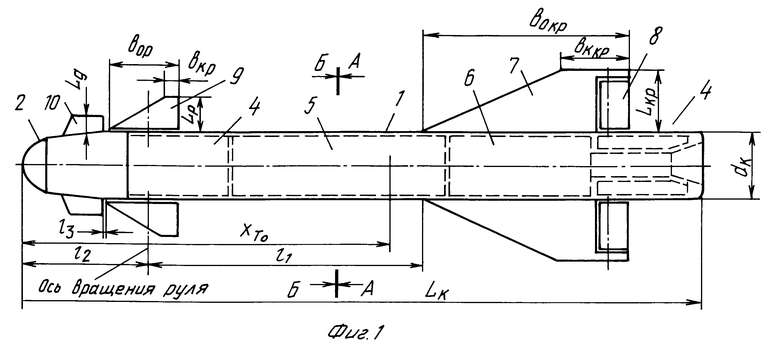
l1 = (3 - 4) dk;
ηp= 7-8;
l2 = (1,5 - 2) dk,
Lд = (0,4 - 0,5) Lp;
l3 = (0,01 - 0,2) dK;
где Xт о - расстояние от носка до центра тяжести ракеты, м; относительное положение центра тяжести ракеты, % Lк;
относительное положение центра тяжести ракеты, % Lк;
Lк - длина корпуса ракеты, м;
λк - удлинение корпуса ракеты;
dК - диаметр корпуса ракеты, м; относительная площадь одного крыла;
относительная площадь одного крыла;
S1 к р - площадь одного крыла, м2;
Sм - площадь миделя корпуса ракеты, м2;
λкp - удлинение крыла;
Lк р - размах крыла, м;
ηкp - сужение крыла;
bо к р - бортовая хорда крыла, м;
bк к р - концевая хорда крыла, м; относительная площадь четырех элеронов;
относительная площадь четырех элеронов;
S4 э л - площадь четырех элеронов, м2;
l1 - расстояние от оси вращения руля до начала бортовой хорды крыла, м; относительная площадь одного руля;
относительная площадь одного руля;
S1 р - площадь одного руля, м2;
λp - удлинение руля;
Lр - размах руля, м;
ηp - сужение руля;
bо р - бортовая хорда руля, м;
bк р - концевая хорда руля, м;
l2 - расстояние от носка ракеты до оси вращения руля, м; относительная площадь одного дестабилизатора;
относительная площадь одного дестабилизатора;
S1 д - площадь одного дестабилизатора, м2;
Lд - размах дестабилизатора, м;
l3 - расстояние между задней кромкой дестабилизатора и передней кромкой руля, м.
l1 = (3 - 4) dк;
ηp= 7 - 8
l2 = (1,5 - 2)dк;
Lд = (0,2 - 0,3)Lр;
l3 = (0,25 - 0,35)dК;
где Xт о - расстояние от носка до центра тяжести ракеты, м; относительное положение центра тяжести ракеты, % Lк;
относительное положение центра тяжести ракеты, % Lк;
Lк - длина корпуса ракеты, м;
λк - удлинение корпуса ракеты;
dК - диаметр корпуса ракеты, м; относительная площадь одного крыла;
относительная площадь одного крыла;
S1 к р - площадь одного крыла, м2;
Sм - площадь миделя корпуса ракеты, м2;
λкp - удлинение крыла;
Lк р - размах крыла, м;
ηкp - сужение крыла;
bо к р - бортовая хорда крыла, м;
bккр - концевая хорда крыла, м; относительная площадь четырех элеронов;
относительная площадь четырех элеронов;
S4 э л - площадь четырех элеронов, м2;
l1 - расстояние от оси вращения руля до начала бортовой хорды крыла, м; относительная площадь одного руля;
относительная площадь одного руля;
S1 р - площадь одного руля, м2;
λp - удлинение руля;
Lр - размах руля, м;
ηo - сужение руля;
bо р - бортовая хорда руля, м;
bк р - концевая хорда руля, м;
l2 - расстояние от носка ракеты до оси вращения руля, м; относительная площадь одного дестабилизатора;
относительная площадь одного дестабилизатора;
S1 д - площадь одного дестабилизатора, м2;
Lд - размах дестабилизатора, м;
l3 - расстояние между задней кромкой дестабилизатора и передней кромкой руля, м.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Справочник "Боевые самолеты России" | |||
| - М., 1994, с.154, 155, 158 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Каталог "Оружие России", т.II "Авиационная техника и вооружение Военно-Воздушных Сил" | |||
| - М.: Изд-во АО "Военный парад", 1996, с | |||
| Деревянная повозка с кузовом, устанавливаемым на упругих дрожинах | 1920 |
|
SU248A1 |

