Устройство относится к портативным тренажерам и может быть использовано в спортивных залах и на сборах для специальных тренировок спортсменов и исследований метательных, бросковых, гребковых и ударных движений.
Известно устройство для тренировки спортсменов [Патент РФ №2135244, А63В 21/112. Устройство для тренировки спортсменов], которое содержит каркас, тормозной механизм и механизм прямого и обратного хода, которые насажены на один вал. Каркас состоит из четырех балок, консоли, шести стоек и телескопической стойки.
Тормозной механизм содержит подшипник, который насажен на вал и крепится к стойкам посредством корпуса подшипника; тормозной барабан, рычаги, насаженные на вал и прижимающиеся к тормозному барабану с помощью пружины, шайбы и винта. Рычаги с помощью фиксаторов и отверстий на тормозном барабане могут закрепляться под разными углами относительно друг друга, и на них можно крепить грузы. Тормозная лента, на которую наклепаны тормозные колодки, охватывает тормозной барабан и обоими концами крепится на рычаге, ось которого закрепляется на подставке, в свою очередь прикрепленной к стойкам. Конец рычага соединен с пружиной и другим рычагом для отжима тормозной ленты при прямом ходе троса.
Механизм прямого и обратного хода состоит из подшипника, насаженного на вал, и крепится к стойкам посредством корпуса подшипника, барабана с первой муфтой, второй полумуфты и пружины, которые насажены на вал. Пружиной вторая полумуфта поджимается к барабану с другой, первой, полумуфтой. В консоли расположена пружина обратного хода, которая одним концом закреплена в конце консоли, а другим - соединена с тросом. На выходе из консоли другой конец первого троса проходит через ролик, несколько раз обвивает барабан прямого и обратного хода и закрепляется на нем. Второй трос проходит через блок на стойке и закрепляется на щечках блока уравнительного.
Недостатком данного устройства является: во-первых, то, что его применение не позволяет раздельное (дифференцированное) нагружение мышц, осуществляющих движение руки и ног во время выполнения метательных, гребковых и ударных движений; во-вторых, его затруднительно сделать портативным, чтобы спортсмен мог брать его с собой на спортивные сборы или на стадион.
Наиболее близким техническим решением, выбранным в качестве прототипа, является «Устройство для тренировки спортсменов» [Патент РФ №2178720, А63В 21/012, 21/015. Устройство для тренировки спортсменов], содержащее каркас, включающий стойки, одна из которых - телескопическая, вал, на который насажены барабан механизма прямого и обратного хода, барабан тормозного механизма, рычаги с грузами, которые закреплены на тормозном барабане под разными углами, уравнительный блок, щеки которого соединены с первым тросом, намотанным на барабан механизма прямого и обратного хода, второй трос, огибающий упомянутый уравнительный блок и соединенный одним концом с рукояткой, второй уравнительный блок, через который пропущен упомянутый второй трос, закрепленный вторым концом на стойке, установленной на каркасе ближе к механизму прямого и обратного хода, третий и четвертый блоки, один из которых закреплен на верхней подвижной части, а другой - в нижней неподвижной части телескопической стойки, третий трос, соединенный одним концом со щечками второго уравнительного блока и огибающий третий и четвертый блоки, а вторым концом - с ремнем, закрепляемым на поясе спортсмена.
Недостатками этого устройства являются:
- непортативность, не позволяющая из-за габаритных размеров брать его на стадион и сборы;
- нет возможности использовать персональный компьютер, а следовательно,
- невозможно записать, задокументировать выполняемое упражнение с целью последующего анализа его биомеханических параметров и корректировки тренировочного процесса;
- использование в нем только грузовых масс.
Задачей данного изобретения является создание портативного тренировочного и исследовательского устройства, которое спортсмен мог бы использовать в спортивном зале и брать на тренировочные сборы для обеспечения регистрации и документирования тренировки в целом или ее части, расширение его функциональных возможностей за счет применения персонального компьютера и специального программного обеспечения, электронных узлов и электродвигателя.
Указанная задача в устройстве универсальном портативном для тренировки спортсменов, содержащем каркас, включающий балки и стойки, одна из которых - телескопическая, вал, на который насажены: первая полумуфта с пружиной, барабан со второй полумуфтой механизма прямого и обратного хода, барабан тормозного механизма с тормозной лентой, рычаги, закрепляемые на тормозном барабане под разными углами, и нагружаемые дополнительной нагрузкой, первый уравнительный блочек, щечки которого соединены с первым тросом, входящим в состав механизма прямого и обратного хода, в который также входит второй трос, намотанный на его барабан в противоположном направлении по отношению к первому тросу, и первый уравнительный блочек, огибаемый третьим тросом, соединенным первым концом с рукояткой, второй уравнительный блочек, через который пропущен третий трос, закрепленный вторым концом через первый датчик силы на стойке, установленной на каркасе ближе к механизму прямого и обратного хода, третий и четвертый уравнительные блочки, закрепленные в верхней и нижней частях упомянутой телескопической стойки соответственно и огибаемые четвертым тросом, одним концом соединенным со щечками второго уравнительного блочка и соединенным другим концом при проведении тренировки на поясе спортсмена, при этом второй указанный трос, помещенный в первую консольную трубу, соединенную с упомянутым каркасом, закрепляется вторым концом на ее выходе через силовой элемент, решается тем, что оно выполнено сборно-разборным, составные части которого соединены крепежными элементами, содержит инерционную и безынерционную системы нагружения спортсмена, включаемые раздельно или вместе, и состоит из трех секций: первая содержит двигательные и нагрузочные узлы устройства, рычаги с упомянутыми грузами для инерционного нагружения спортсмена и дополнительный рычаг с блочком на его конце - для безынерционного нагружения, вторая секция - удлинительная и третья - настроечная, кроме того, устройство содержит два регулируемых узла, один из которых - узел с ручной настройкой, а другой - с настроечным электроприводом постоянного тока, при этом каждый их этих узлов включает резиновый амортизатор и механическую пару «винт-гайка», головки винтов которых выполнены: с насечкой на боковой поверхности в узле ручной настройки и в виде шестеренки - составной части в редукторе зубчатой передачи узла с электроприводом, также дополнительно введены миниатюрный персональный компьютер, два цифроаналоговых преобразователя, двигатель постоянного тока, соленоид, датчик перемещения вала и барабана механизма прямого и обратного хода, все запитываемые электроэнергией от миниатюрного аккумулятора, при этом упомянутые первый и второй датчики силы и введенные датчики перемещения вала и барабана механизма прямого и обратного хода, третий датчик силы, введенный в узел с электроприводом, подключены электрически к миниатюрному персональному компьютеру через USB-порт, а двигатель постоянного тока, электропривод и соленоид подключены к внутренней шине указанного компьютера: первый - через электронный блок управления электродвигателем и первый цифроаналоговый преобразователь, а второй - через электронный усилитель и второй цифроаналоговый преобразователь, при этом узел с электроприводом и часть введенного пятого троса размещены во второй консольной трубе, выполненной квадратного поперечного сечения и закрепленной на каркасе параллельно первой консольной трубе, выполненной также квадратного поперечного сечения, в которой размещен узел с ручной настройкой, причем один конец пятого троса соединен с резиновым амортизатором, а вторым - с каркасом через огибаемый им блочек на конце рычага для безынерционного нагружения и через третий датчик силы, и при этом управление процессом тренировки и исследований, регистрация данных с периферических датчиков и обработка информации о параметрах движений спортсмена, углубленная математическая обработка биомеханических характеристик осуществляются с помощью соответствующего программного обеспечения.
Предлагаемое изобретение поясняют схематические чертежи.
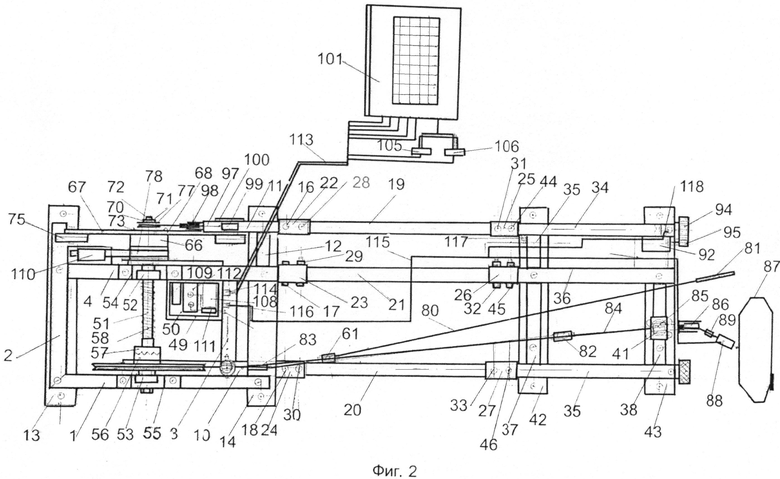
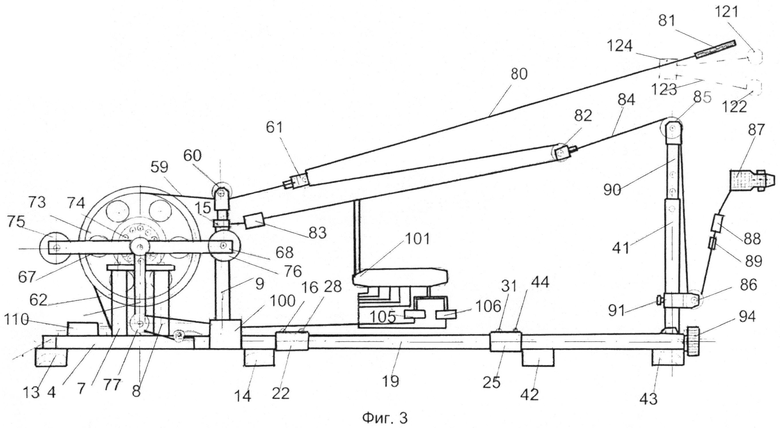
На фиг.1, 2, 3 изображено устройство: вид спереди (главный вид устройства - фиг.1), вид сверху (фиг.2) и вид сзади (фиг.3).
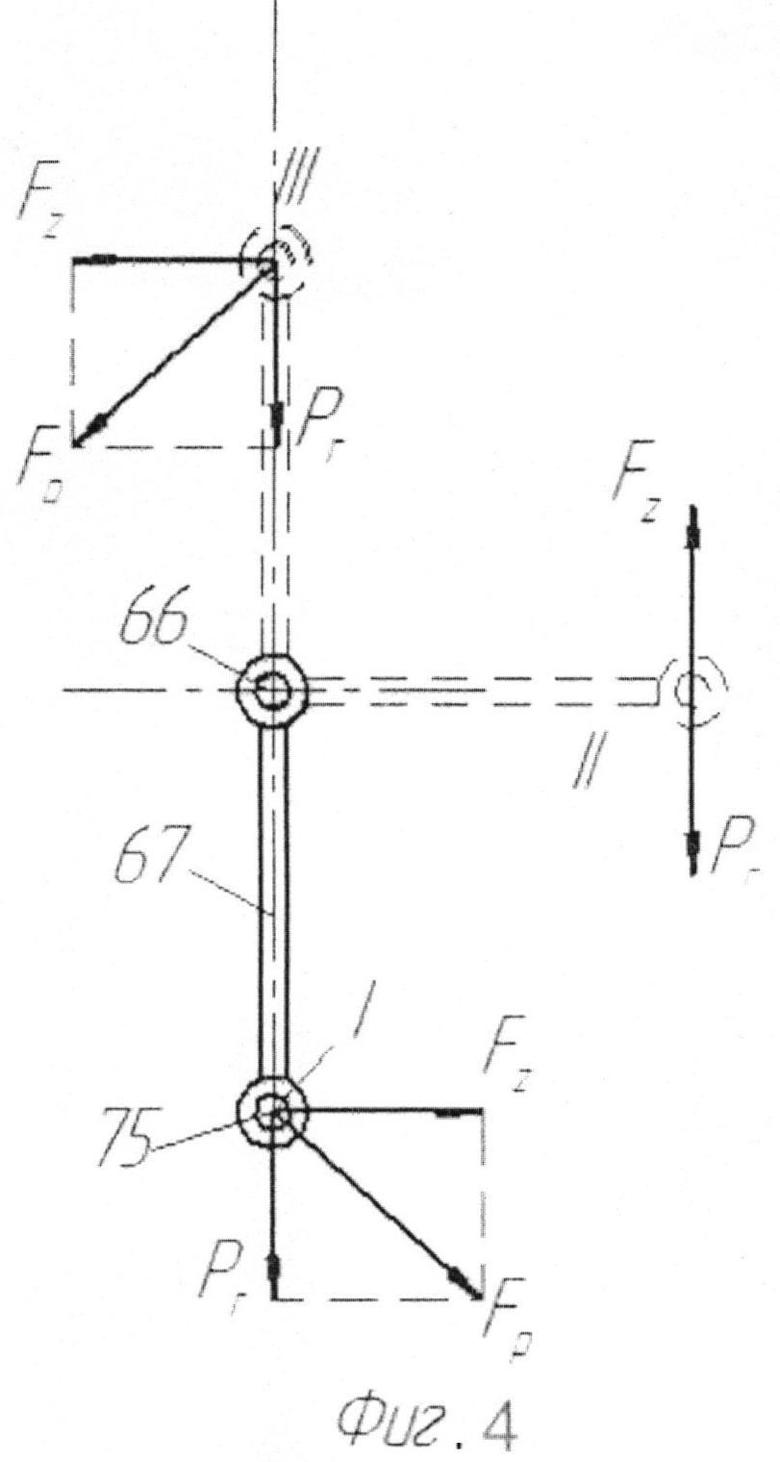
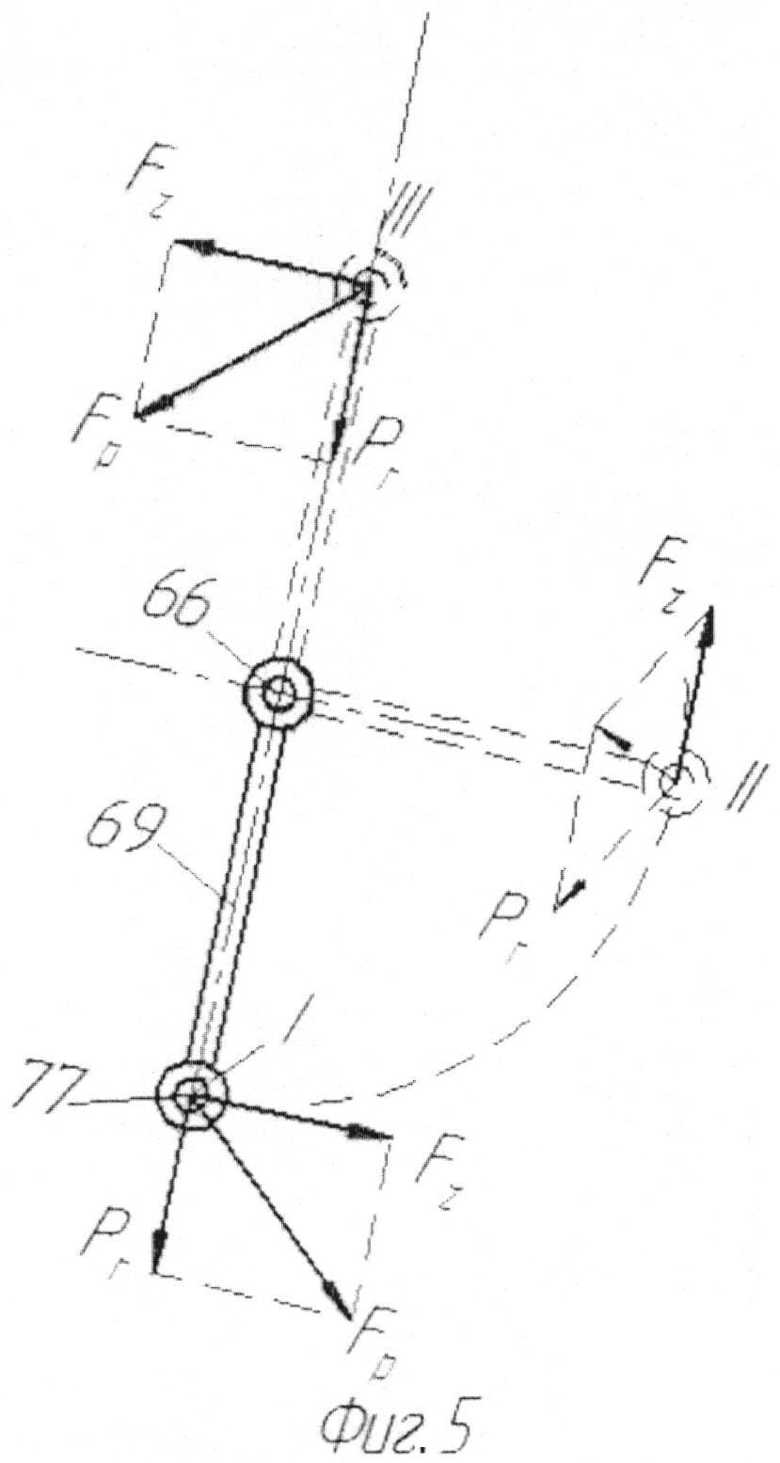
На фиг.4 и 5 представлены воздействующие силы в виде векторов.
На фиг.6 и 7 показано кольцо при раздельном испытании инерционной и практически безынерционной систем.
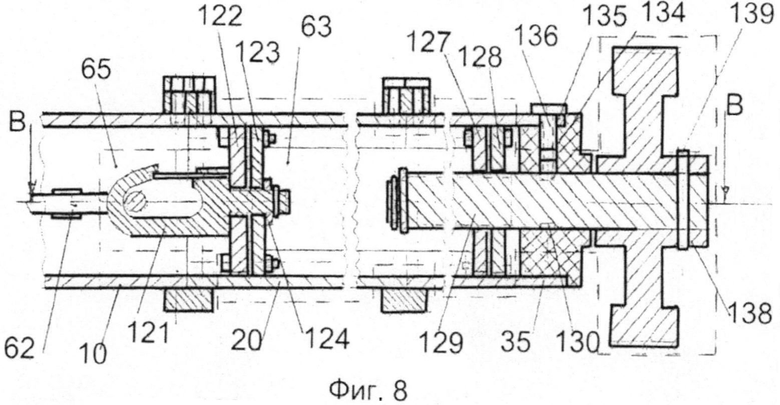
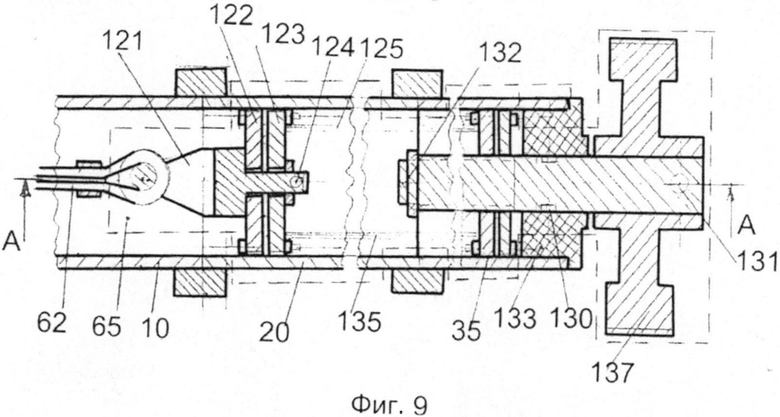
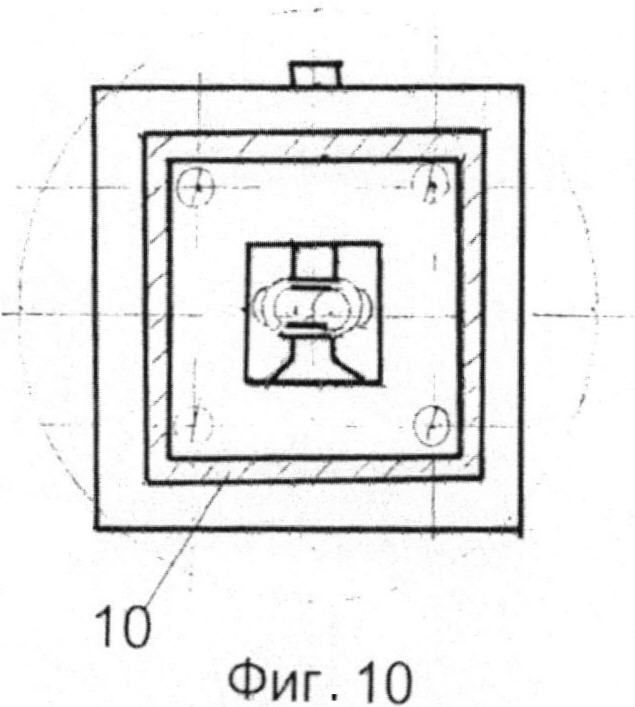
На фиг.8, 9 и 10 изображен регулируемый узел с ручной настройкой: вид спереди (фиг.8), вид сверху (фиг.9) и вид сбоку слева (фиг.10).
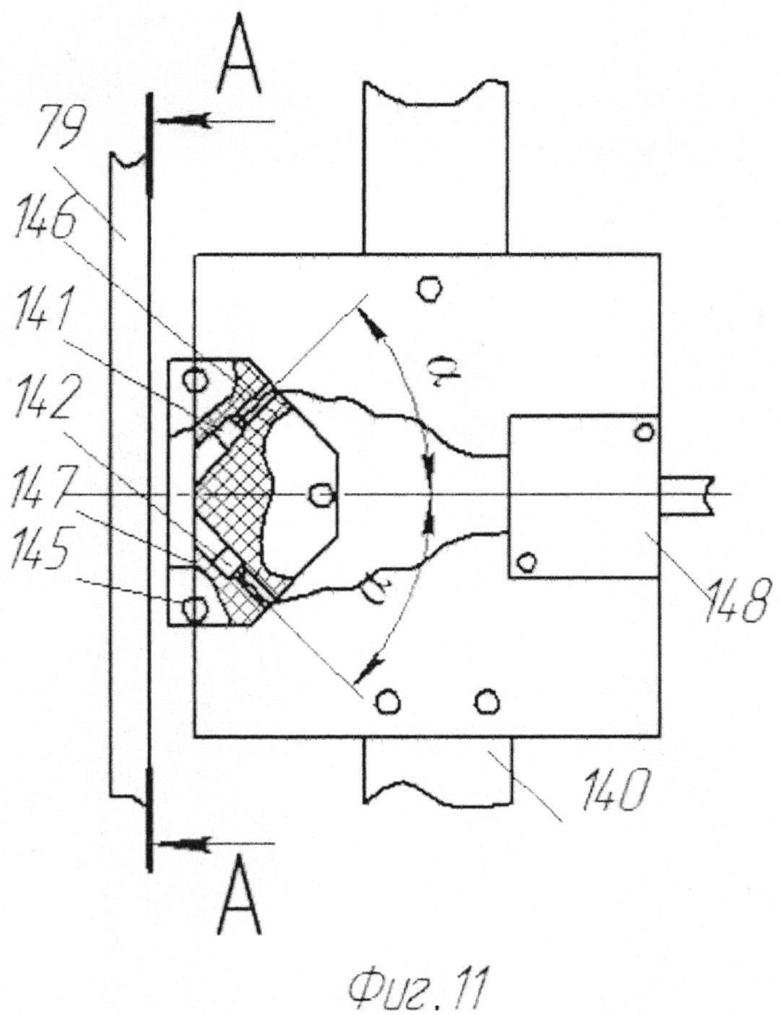
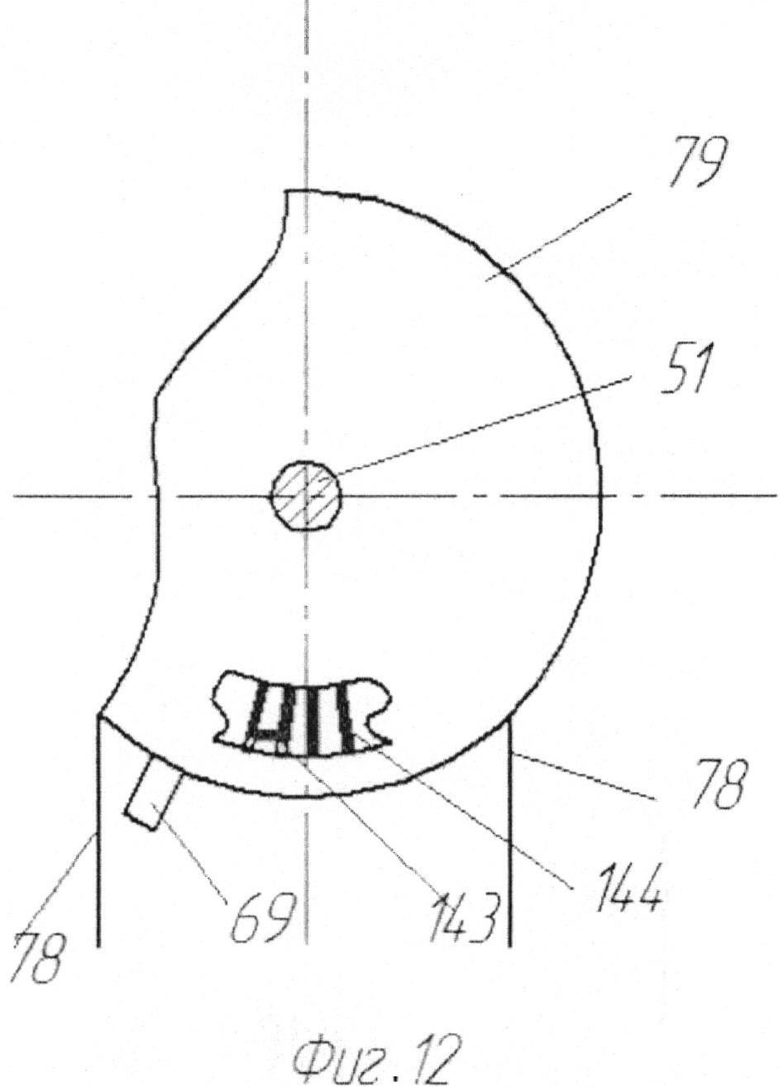
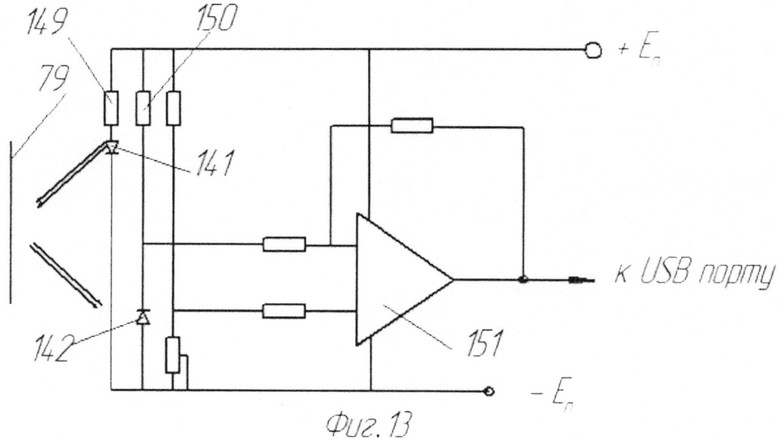
На фиг.11, 12 и 13 показан датчик перемещения тормозного барабана: на фиг.11 - вид сверху, на фиг.12 - вид справа на измерительный диск и на фиг.13 - одна из возможных электрических схем датчика перемещения тормозного барабана.
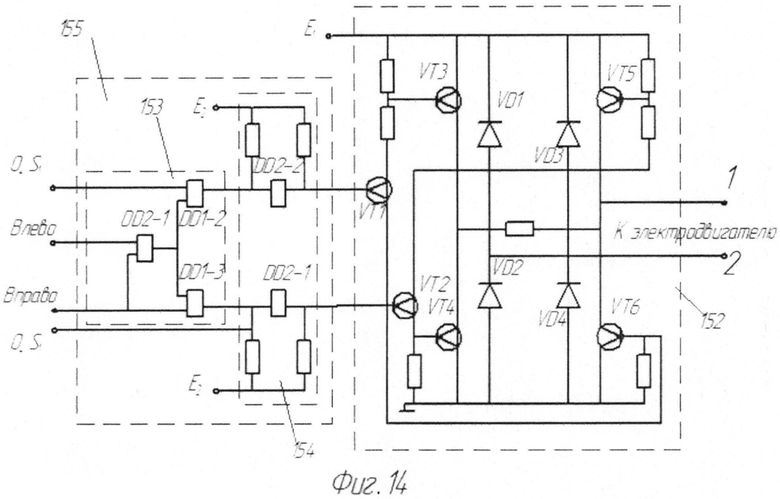
На фиг.14 изображена электрическая схема управления электродвигателем постоянного тока.
Устройство, изображенное на фиг.1, 2 и 3, состоит из трех секций, размещенных на сборно-разборном каркасе.
Каркас в первой секции - это сварная или механически скрепленная конструкция, состоящая из четырех балок 1, 2, 3 и 4, последняя выполняет также роль трубы жесткости, из пяти стоек 5, 6, 7, 8 и 9, двух консольных труб 10, 11, первая из которых - 10 - прикреплена к балке 1 непосредственно, а вторая - 11 - к балке 4 коротким патрубком 12, из двух деревянных опор 13 и 14, на которых закреплен каркас, хомутика 15, надеваемого на стойку 9, и трех крепежных болтов 16, 17, 18 (последние показаны полностью на фиг.2).
Каркас во второй секции - суть продолжение в нем основных конструктивных и крепежных элементов первой секции: двух консольных труб 19, 20 и трубы жесткости 21, шести крепежных элементов 22, 23, 24, 25, 26, 27 и шести крепежных болтов 28, 29, 30, 31, 32 и 33.
Каркас третьей секции - сварная или механически скрепленная конструкция, состоящая из: как бы продолженных во второй и заканчивающихся в третьей секции двух консольных труб 34, 35 и трубы жесткости 36, двух поперечных балок 37, 38, и при этом консольная труба 34 прикрепляется к трубе жесткости 36 коротким патрубком 39 и косынкой 40, одной телескопической стойки 41, прикрепленной вертикально к поперечной балке 38, двух деревянных опор 42, 43, на которые крепится каркас третьей секции, и трех крепежных болтов 44, 45 и 46.
Первая секция состоит из тормозного узла 47, узла прямого и обратного хода 48 (на чертеже не оконтурены), панели электронных узлов 49, размещенной на поддоне 50.
В устройстве используется метод прямого и обратного хода и тормозной метод, когда на прямом ходе с помощью тормозного узла воздействуют нагрузкой на спортсмена, а на обратном ходе возвращают автоматически устройство в исходное положение. Конструктивно это осуществляется следующим образом. Главная подвижная часть устройства образована валом 51 с насаженными подшипниками 52 и 53, помещенными в корпусах 54 и 55, посредством которых они крепятся к стойкам 5, 6 и 7, 8 каркаса первой секции соответственно.
Узел прямого и обратного хода 48 (не оконтурен) состоит из: барабана с полумуфтой 56, полумуфты 57, пружины 58. Барабан с полумуфтой 56 имеет скользящую посадку на вал 51, а полумуфта 57 имеет возможность перемещаться только вдоль вала 51. Пружиной 58, надетой на вал 51, полумуфта 57 прижимается к барабану с полумуфтой 56. Первый трос 59, одним концом закрепленный на барабане с полумуфтой 56, несколько раз обвивает его и проходит под роликом 60, установленным на стойке 9, и закрепляется на щечках первого уравнительного блочка 61. Это организация прямого хода упомянутого узла прямого и обратного хода 48. А его обратный ход осуществляется следующим образом. Второй трос 62, намотанный на барабан с полумуфтой 56 в противоположном направлении по отношению к первому тросу 59, подается в первый отрезок первой консольной трубы 10, а затем - во второй отрезок 20 продолжения этой трубы, где второй конец второго троса 62 соединяется с силовым элементом 63, выполненным из резинового амортизатора и связанным с регулятором 64, выполненным на основе пары «винт-гайка», головка винта которого выполнена с насечкой и закреплена на свободном конце третьего отрезка 35 первой консольной трубы. Трос 62, резиновый амортизатор 63 (оконтурен штрихпунктирными линиями) и регулятор 64 на основе пары «винт-гайка» (оконтурен двумя штрихами и пунктирными линиями) представляет собой тросоамортизационное силовое нагрузочное средство 65 (оконтурено пунктирными линиями).
Тормозной узел 47 содержит: тормозной барабан 66 с тугой посадкой на вал 51, рычаги 67, 68 и 69, также насаженные на вал 51, прижимаются к тормозному барабану 66 с помощью пружины 70, шайбы 71 и винта 72. Рычаги 67, 68 и 69 с помощью фиксаторов 73 и отверстий 74 в тормозном барабане 66 могут крепиться относительно друг друга под разными углами, и на рычаги 67 и 68 можно надевать грузы 75 и 76, а на рычаг 69 разместить блочек 77. Тормозная лента 78, на которую наклепаны тормозные колодки, охватывает тормозной барабан 66 и одним концом крепится к стойке 8 каркаса первой секции. К внутренней стороне тормозного барабана прикреплен измерительный диск 79 для оптического измерения перемещения вала 51.
Но вернемся к узлу прямого и обратного хода 48. В нем третий трос 80 одним концом связан с рукояткой 81, огибает первый 61 и второй 82 уравнительные блочки и закрепляется через первый датчик силы 83 и хомутик 15 на стойке 9, ближней к барабану с полумуфтой 56. Каждая секция выполняет свою роль. Вторая секция - удлинительная. Третья секция - настроечная состоит из элементов трособлочной настройки и электропривода постоянного тока для задания силового воздействия на мышцы спортсмена. И осуществляется это следующим образом. Четвертый трос 84, входящий в состав этой секции, одним концом связан со щечками второго уравнительного блочка 82, огибает верхний 85 и нижний 86 блочки, установленные на телескопической стойке 41, и соединен со специальным ремнем 87 спортсмена через второй датчик силы 88 с помощью замка 89, например кожаного поводка с пряжкой, которым осуществляется грубая настройка, а с помощью блочков 85, 86 и выдвижной 90 телескопической части стойки 41 и фиксатора 91 достигается точная настройка под конкретного спортсмена, то есть с помощью трособлочных элементов, телескопической стойки, фиксатора и замка осуществляется грубая и точная настройка устройства под конкретного спортсмена.
Конструкция с двигателем постоянного тока 92 и регулятором 93, размещенным в третьем отрезке 34 во второй консольной трубе, также входит в узел прямого и обратного хода 48. Головка 94 регулятора выполнена в виде небольшого зубчатого колеса редуктора, состыкованного с зубчатым колесиком 95, надетым на ось двигателя постоянного тока 92. В комплексе они образуют редуктор и привод постоянного тока для задания силового воздействия на спортсмена во время тренировки или исследований. Подобно нагрузочному средству 65 регулятор 93 построен на основе пары «винт-гайка». Его гайка состыкована с силовым элементом 96, выполненным из резинового амортизатора и связанным с пятым тросом 97, второй конец которого огибает блочки 98, 77 и закрепляется на датчике силы 99, расположенном на вертикальной пластине 100, установленной на отрезке 11 второй консольной трубы первой секции.
Введенный дополнительно миниатюрный персональный компьютер 101 расширяет функциональные возможности устройства, позволяя повысить качественные и количественные показатели тренировок. Правда, для этого необходимо оснастить его электрическими периферийными датчиками и цифроаналоговыми преобразователями, с помощью которых персональный компьютер при соответствующем программном обеспечении мог бы управлять процессом тренировки, помогая тренеру. Первый - 83, второй - 88 и третий - 99 датчики силы измерительными механическими средствами введены в устройство. Периферийные датчики перемещения 102 тормозного барабана 66 и перемещения 103 барабана прямого и обратного хода 56 введены оптическими средствами в первую секцию. Первый датчик перемещения 102 тормозного барабана 66 закреплен на стойках 7, 8 в непосредственной близости от измерительного диска 79, а второй датчик перемещения 103 барабана прямого и обратного хода 56 закреплен на стойках 5, 6 аналогично (первый датчик 102 не показан, а второй - 103 изображен на фиг.1). Информационными выходами первый - 83, второй - 88, третий - 99 датчики силы, первый датчик перемещения 102 и второй датчик перемещения 103 подключены к USB-порту 104 миниатюрного персонального компьютера 101, а первый 105 и второй 106 цифроаналоговые преобразователи электрическими входами соединены с внутренней шиной 107 миниатюрного персонального компьютера 101 и выходами - первый 105 - со входом схемы управления 108 двигателя постоянного тока 92, а второй 106 - со входом электронного усилителя 109, и при этом к выходу схемы управления 108 подключен двигатель постоянного тока 92, а к выходу электронного усилителя 109 - соленоид 110. Схема управления 108 двигателем постоянного тока и электронный усилитель 109, управляющий соленоидом 110, размещены на плате электронных узлов и элементов 49, где также установлена платка гасящих резисторов 111 и малогабаритный энергоемкий аккумулятор 112, от которого запитаны все периферийные датчики, цифроаналоговые преобразователи и электронные узлы. Датчики силы 83, 88, 99, датчик перемещения 102 тормозного барабана, датчик перемещения 103 барабана прямого и обратного хода, первый 105 и второй 106 цифроаналоговые преобразователи подключаются электрически к миниатюрному персональному компьютеру 101 посредством первого кабеля 113 и первого разъема 114. Все электрические цепи третьей секции собраны во втором кабеле 115 и втором разъеме 116, в том числе и цепи для защиты двигателя постоянного тока 92 в случае сбоя в миниатюрном персональном компьютере 101 и других сбоев, и применены для этого, например, микропереключатели 117 и 118, которыми задается диапазон перемещения гайки механической пары «винт-гайка» 93 во второй консольной трубе в отрезке 34 третьей секции. Для зарядки аккумулятора 112 от зарядного устройства и запитывания миниатюрного персонального компьютера 101 используется третий штекерный разъем 119 на два контакта.
Прежде чем приступить к выполнению упражнения, например к имитации метания копья в условиях, предоставляющих новые возможности устройством, надо рассмотреть эти возможности. Выше сказано, что в устройстве имеется две системы: инерционная и практически безынерционная.
Инерционная система воздействия с помощью грузовых масс, вала и двух рычагов, закрепляемых на тормозном барабане, подробно рассмотрена в прототипе [2]. Мы рассмотрим для простоты и большего понимания работы устройство с одним рычагом и векторы основных действующих при этом сил.
Пусть рычаг 67 с грузом 75 (фиг.4) находится в нижнем положении и вектор силы груза Pг воздействует вертикально вниз (фаза I). Спортсмен прикладывает к тормозному барабану 66 силу воздействия Fв. Рычаг 67 с грузом 75 начинает перемещаться под действием равнодействующей силы Fp (векторное суммирование вектора Pг и силы воздействия Fв). При этом вектор силы Fв должен превосходить вектор груза Pг, чтобы преодолеть среднее положение рычага 67 с грузом 75, когда векторы Pг и Fв воздействуют взаимно противоположно (фаза II). В конечной фазе (фаза III) движения снаряда (имитатора копья) к нему будет приложен результирующий вектор силы Fp, и спортсмену необходимо, по возможности, увеличить вектор силы Fв.
Рассмотрим теперь применение практически безынерционной системы (фиг.5). Воздействие организовано с помощью рычага 69, блочка 77 и огибающего его троса 97, обладающих некоторой массой. Поэтому мы назвали систему - практически безынерционное воздействие. Здесь также можно выделить три фазы. Пусть рычаг 69 находится в нижнем положении и вектор силы Fби воздействует вниз по тросу 97 (фаза I), а вектор силы воздействия Fв - перпендикулярно рычагу 69. Рычаг 69 с блочком 77 начинает перемещаться под действием равнодействующей силы Fp (вектор силы Fби увеличивается, так как резиновый амортизатор растягивается во второй консольной трубе). Вектор силы Fв также должен превосходить вектор силы Fби, и под действием силы вектора силы Fp рычаг 69 с блочком 77 перемещается далее (фаза II). В конечной фазе (фаза III) движения снаряда (имитатора копья) к рычагу 69 и блочку 77 будет приложена результирующая сила - вектор Fp при значительном увеличении вектора силы Fби из-за растянувшегося резинового амортизатора и спортсмену придется увеличивать вектор силы Fв.
Анализ векторных сил показывает, что рычаг 67 с грузом 75 эффективен в начальной стадии движения (фаза I), а рычаг 69 с блочком 97 и резиновым амортизатором - в конце (фаза III) движения. В случае, когда необходимо тренировать начальное движение (фаза I), целесообразно использовать рычаг с грузом, а когда необходимо тренировать конечное движение (фаза III), то рычаг 69 с блочком. Когда же необходима тренировка целостного упражнения, целесообразно использовать рычаг 67 с грузом и рычаг 69 с блочком.
Конструктивно это реализуется с помощью сменного кольца 120 (фиг.6, 7), надеваемого на вал 51 вместо рычага 69 с блочком 77, - в первом случае, и во втором случае - установка на вал 51 сменного кольца 120 вместо рычага 67 с грузом 75. Конечно, проще всего, когда толщина рычагов 67 и 69 и сменного кольца 120 одинаковая.
Прежде чем приступать к выполнению упражнения - имитационному движению, необходимо рычаги 67, 68 и 69 установить в такое исходное положение, которое соответствует реализации определенного режима сопротивления, а силовые нагрузки: грузы 75 и 76 подобрать необходимой массы, и натяжение резинового амортизатора во второй консольной трубе с помощью двигателя постоянного тока 92 также должно соответствовать режиму.
Первоначально рассмотрим работу устройства на примере выполнения на нем имитационного движения «метание копья с места» в условиях преодоления убывающего сопротивления для руки и туловища спортсмена. Поворот барабана с полумуфтой 56 узла прямого и обратного хода 48 на 180 угловых градусов должен примерно соответствовать удвоенной величине сматывания троса 59, то есть перемещению кисти руки спортсмена. Для этого он должен к рычагам 67 и 68, а также к рычагу 69 приложить определенное усилие. Затем устанавливают рычаги 67 и 68 в вертикальное положение, а рычаг 69 - в некоторое отстающее от нижнего груза положение и фиксируют это положение как начальное. При этом положении устройства спортсмен опоясывается ремнем 87, связанным механически со щечками второго уравнительного блочка 82 и с тросом 80, захватывает рукоятку 81 (имитатор копья) и принимает исходное положение (при этом трос 59 и трос 80 должны быть слегка натянуты) и имитирует метание копья с места.
В самом начале движения, когда происходит полное натяжение тросов 59 и 80, трос 59 поворачивает барабан с полумуфтой 56. Это движение передается на рычаги 67, 68, 69 и на тормозной барабан 66, на котором они закреплены.
В дальнейшем сматывание троса 59 вызывает вращение барабана с полумуфтой 56, которое передается на тормозной барабан 66 посредством полумуфт 56 и 57. По окончании поступательного движения руки спортсмена происходит расслабление троса 59 и максимальное растяжение резинового амортизатора 63 тросоамортизационного силового нагрузочного средства 65 в первой консольной трубе, что приводит к резкому повороту барабана с полумуфтой 56, отслеживаемому от самого начала движения датчиком перемещения 103 барабана прямого и обратного хода 56. Когда рычаги 67 и 68 займут вертикальное положение, а рычаг 69 - несколько смещенное положение относительно нижнего рычага с грузом, миниатюрный персональный компьютер 101 подает команду на вход электронного усилителя 109, выход которого подключен к соленоиду 110 для фиксирования этого исходного положения. Если по каким-либо причинам рычаги не достигнут указанного положения или пройдут его, то тренер или инженер-исследователь установят требуемое положение рычагов 67, 68, 69. Для повторного выполнения упражнения спортсмен возвращается в исходное положение и также возвращается в исходное положение резиновый амортизатор 63 в первой консольной трубе. После этого спортсмену разрешается в очередной раз повторить указанное двигательное действие, если тренер не намерен изменить условия его выполнения.
Теперь рассмотрим работу устройства на примере выполнения на нем упражнения для борца в условиях преодоления возрастающего, а затем убывающего сопротивления для туловища спортсмена. Поворот барабана с полумуфтой 56 узла прямого и обратного хода 48 на 90 угловых градусов соответствует примерно перемещению кистей рук спортсмена. Чтобы упражнение выполнялось с преодолением возрастающего, а затем убывающего сопротивления, спортсмену необходимо к рычагам 67 и 69 (возьмем эти два рычага) приложить соответствующее усилие. Рычаг 67 должен находиться в горизонтальном положении (слева на фиг.1), а рычаг 69 - несколько отставать от него. Это исходное положение устройства для выполнения данного упражнения.
При установленном исходном положении рычагов 67 и 69 и необходимых грузовых нагрузок на каждом рычаге спортсмен опоясывается ремнем 87, связанным, как указывалось ранее, со щечками второго уравнительного блочка 82, захватывает ремни 121 и 122, расположенные на концах шестого дополнительного троса 123, размещенного вместо имитатора копья 81 и закрепленного приблизительно на середине троса 123 посредством замка 124 на тросе 80 (показан на фиг.3 пунктиром), и приступает к выполнению упражнения.
В дальнейшем, по мере сматывания троса 59 с барабана с полумуфтой 56 при выполнении указанного движения происходит вращение барабана 56 с полумуфтой 56, которое с помощью полумуфт 56 и 57, пружины 58 и вала 51 передается на тормозной барабан 66 и рычаги 67 и 69. По окончании поступательного движения кисти руки спортсмена происходит расслабление троса 59, прекращение наматывания троса 62 и растяжение резинового амортизатора 63 тросоамортизационного силового нагрузочного средства 65 в первой консольной трубе, что приводит к резкому обратному повороту барабана с полумуфтой 56 и дальнейшему продолжению вращения тормозного барабана 66, отслеживаемого от самого начала движения датчиком перемещения 102 тормозного барабана 66. Рычаг 67 под воздействием силы инерции груза 75 достигает горизонтального исходного положения, которое фиксируется соленоидом 110 по команде миниатюрного персонального компьютера 101 и датчика перемещения 102 тормозного барабана 66. Резиновый амортизатор 63 также возвращается в исходное положение, как и узел прямого и обратного хода 48, и спортсмен может совершать движение второй рукой.
Таким образом, исходное положение рычагов 67, 68, 69 и расположение и величина силовых нагрузок являются фактором, задающим тот или иной режим изменения сопротивления, создаваемый предлагаемым устройством. Величина, определяющая суммарный момент силового воздействия (М), является произведением суммарной величины проекции основных сил на ось Х (Fxi) на плечо воздействия каждой силы (Ii), то есть
 ,
,
где Fxi - проекция i-й силы на ось X; li - меняющееся плечо воздействия каждой силы в момент ее приложения.
Для определения количественных силовых характеристик, возникающих при проведении тренировок и исследования движений, в заявляемое устройство введены датчики силы 83, 88, 99, электрически связанные с миниатюрным персональным компьютером 101. В принципе получают интегральные характеристики сил в процессе руки и туловища спортсмена, но методами суперпозиции можно определить отдельные составляющие сил.
В заявляемом устройстве несколько нестандартных узлов. Рассмотрим основные из них, уделив внимание их конструкции, принципу действия и участию в работе всего устройства.
Регулируемый узел с ручной настройкой. Этот узел, изображенный на фиг.8, 9 и 10, представляет собой тросоамортизационное нагрузочное средство 65 (оконтурено пунктирными линиями), размещенное в первой квадратной консольной трубе и содержащее трос 62, резиновый амортизатор 63 и регулятор 64 (показаны на фиг.1 штрихпунктирными линиями). Трос 62 соединен с резиновым амортизатором 63 (фиг.8, 9) с помощью карабина 121, продольное перемещение которого в квадратных шайбах 122 и 123 блокируется штифтом 124 (с шайбой). Резиновая часть амортизатора 63 выполнена из двух элементов: 125 и 126 по бокам шайб 122 и 123. Последние, кроме того, жестко сжимают концы этих элементов. Вторые концы резиновых элементов 125 и 126 соединены с квадратной гайкой 127 и шайбой 128, которыми эти концы элементов 125 и 126 плотно зажимаются без возможности перемещений. В центре гайки 127 и шайбы 128 сделаны отверстия: в гайке 127 резьбовое, а в шайбе 127 - без резьбы, в которые вкручивается винт 129. Особенностью винта 129 является следующее: во-первых, он образует с гайкой 127 механическую пару «винт-гайка»; во-вторых, резьба на винте 129 сделана не по всей его длине, а только на определенной его части; в-третьих, на гладкой его поверхности сделана поперечная канавка 130; в-четвертых, вблизи от его конца просверлено по диаметру отверстие 131; в-пятых, в начале нарезной части винта 129 сделана проточка, в которой по диаметру проделано второе поперечное отверстие 132. На гладкую часть винта 129 надета деталь 133 с поперечным отверстием 134, вставляемая в первую консольную трубу 35 с резьбовым отверстием 135, в которое вкручивается винт 136, конец которого входит в упомянутую канавку 130, препятствуя продольному перемещению винта 129. Головка винта 129 представляет собой колесико 137 с насечкой по его внешней боковой поверхности и поперечным отверстием 138 по диаметру вблизи боковой его части, совмещенное с первым упомянутым отверстием 131 на винте 129. Колесико 137 надевается на гладкую часть винта 129 и фиксируется пружинным штифтом 139 и, кроме того, оно образует с винтом 129 миниатюрный ворот.
Работает данный узел следующим образом. После начальной сборки устройства в целом налаживают его отдельные узлы и элементы. В механизме прямого и обратного хода задают скорость его возврата в исходное состояние и влияния его на нагрузку прямого хода. В случае необходимости изменить параметры данного узла инженер-исследователь вращением колесика 137 перемещает резиновый амортизатор 63 ближе или дальше от конца консольной трубы с помощью механической пары: винт 129 и гайка 127.
Датчик перемещения 102 тормозного барабана. Важной количественной характеристикой при имитации метания копья с места является величина перемещения рычага 69. Есть много способов измерения перемещения, но относительно точное и простое в реализации измерение этого параметра можно получить с помощью оптического датчика, работающего на светоотражение. Рассмотрим конструкцию и принцип действия оптического датчика перемещения 102 отражательного типа применительно к тормозному барабану 66. Этот датчик, установленный на перекладине 140 между стойками 7 и 8, содержит (фиг.11, 12 и 13): излучательный элемент 141, световоспринимающий элемент 142 (фотодиод), которые расположены относительно друг друга под некоторым углом 2а, обеспечивающим засветку световоспринимающего элемента 142 только при отражении света излучательного элемента 141 светлой риской 143 на измерительном диске 79, сменяющей поглощательную темную риску 144 на этом диске (фиг.12). Это выполнено механически в виде колодочки 145 (фиг.11), где соответствующим образом просверлено два канальца 146 и 147, в которых помещены соответственно излучательный элемент 141 и световоспринимающий элемент 142. Эти элементы электрически соединены с электронной платкой 148.
На фиг.13 показана одна из возможных электрических схем датчика перемещения 102 тормозного барабана 66. Излучательный элемент 141 включен в прямом направлении. Электрический ток через него задается резистором 149. Световоспринимающий элемент (фотодиод) 142 включен в обратном направлении, и электрический ток через него в освещенном состоянии задается резистором 150. Изменение потенциала в темновом и световом состоянии воспринимается усилителем-формирователем 151, выход которого соединен электрически с USB-портом 104 миниатюрного персонального компьютера 101 (фиг.1).
Работа датчика перемещения 102 тормозного барабана 66 осуществляется следующим образом. При вращении тормозного барабана 66 мимо светочувствительной схемы проходят, чередуясь, отражательные 143 риски и поглотительные 144 риски на измерительном диске 79, на которые она реагирует скачкообразным изменением потенциала на выходе усилителя-формирователя 151. Этот сигнал подается на USB-порт 104 миниатюрного персонального компьютера 101.
Аналогично выполнен и работает датчик перемещения 103 механизма прямого и обратного хода (фиг.1).
Электрическая схема управления электродвигателем постоянного тока. Известно много электрических схем управления электродвигателями постоянного тока в приводах. Выбрана мостовая усилительная электронная схема, состоящая (фиг.14) из силового узла на транзисторах VT1÷VT6 (пунктирная линия 152), управляюще-защитного узла на двух микросхемах (микросхемы оконтурены пунктирными линиями - 153 и 154, а данный узел оконтурен пунктирными линиями - 155). Кроме того, для организации защиты электродвигателя применены дополнительно два кольцевых выключателя S1 и S2.
Работает данная схема следующим образом. Команда «влево» формирует «1» на входе микросхемы ДД1-1 и на выходе микросхемы ДД2-1. Команда «вправо», соответственно, на выходе микросхемы ДД1-3 и на входе микросхемы ДД2-2.
В нештатной ситуации возможно появление логической «1» на выходе «влево» и «вправо». В этом случае на микросхемах ДД1 и ДД2 формируется низкий уровень - электродвигатель останавливается.
При срабатывании концевого выключателя S1 на вход ДД2-2 поступает сигнал высокого уровня, а на выходе ДД2-2 формируется логический «0» (т.е. низкий уровень) и движение «влево» запрещается. Аналогично при срабатывании концевого выключателя S2 - «вправо».
Выходы микросхем ДД2-1 и ДД2-2 являются входами силового узла. При низком уровне на этих входах все транзисторы закрыты и электродвигатель обесточен. Высокий уровень - логическая «1» на выходе ДД2-1 открывает транзисторы VT1, VT3 и VT6, и по цепи +E1, транзистор VT3, выход 1 электродвигателя, выход 2 электродвигателя, транзистор VT6, общий привод, к которому подключен -E1, будет протекать электрический ток и электродвигатель начнет вращаться влево. Высокий уровень (логическая «1») на выходе микросхемы ДД2-2 открывает транзисторы VT2, VT4, VT5 и по цепи +E1, транзистор VT5, выход 2 электродвигателя, транзистор VT4, общий привод будет протекать электрический ток и электродвигатель начнет вращаться в противоположном направлении.
Программное обеспечение. Составная часть устройства - блок программ. Конструктивно он выполнен на лазерном диске и с помощью дисковода может быть перенесен на жесткий диск компьютера. Программное обеспечение условно можно разделить на три группы: 1) служебные и тестовые программы, 2) информационные и регистрационные и 3) математические - для обработки характеристик спортивного движения.
Служебные и тестовые программы обеспечивают работу персонального компьютера и проверку его правильной работоспособности.
Регистрационные и информационные программы обеспечивают автоматический ввод, регистрацию и обработку данных с периферийных датчиков, предварительную обработку входных сигналов, запоминание и ввод графического изображения и тарировку входных сигналов, первичную математическую обработку характеристик спортивных упражнений.
Программы углубленной математической обработки характеристик спортивных упражнений позволяют выполнять расчет следующих биомеханических характеристик: длительность всего движения и отдельных его фаз и периодов, величины перемещения, скорости и ускорения движения, работы и импульса силы.
По сравнению с прототипом предлагаемое портативное устройство позволяет повысить эффективность тренировок, во-первых, благодаря возможности его применения на сборах и, во-вторых, благодаря расширению функциональных возможностей самого устройства за счет применения в нем малогабаритного переносного компьютера, например, типа «Ноутбук».
Главной особенностью заявляемого устройства является его портативность, а именно массогабаритные характеристики, так как он выполнен сборно-разборным из трех секций, соединенных между собой с помощью крепежных элементов, например винтов и патрубков большого размера.
В заявляемом техническом решении отличительные признаки проявляют свойства, известные в отдельности в других областях науки и техники, а взятые в совокупности с признаками прототипа позволяют, опираясь на них, создать портативное тренировочно-исследовательское устройство, расширить его функциональные возможности за счет наличия инерционных и безынерционных систем нагружения спортсменов, повысить эффективность тренировок и точность исследований путем применения в нем персонального компьютера, что указывает на соответствие заявляемого технического решения критерию «существенные отличия».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2000 |
|
RU2178720C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И ТРЕНИРОВКИ СПОРТСМЕНОВ-АРМРЕСТЛЕРОВ | 2009 |
|
RU2413557C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 1995 |
|
RU2135244C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ НОГ | 2009 |
|
RU2408404C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ-АРМРЕСТЛЕРОВ | 2008 |
|
RU2385172C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ШТАНГИ И БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ ТЯЖЕЛОАТЛЕТА | 2008 |
|
RU2403937C2 |
| Устройство для тренировки мышц конькобежцев | 2016 |
|
RU2634243C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПРИНТЕРОВ И ФУТБОЛИСТОВ | 2005 |
|
RU2297866C2 |
| УСТРОЙСТВО БЕЗЫНЕРЦИОННОГО ЗАДАНИЯ ПЕРЕМЕННОГО СОПРОТИВЛЕНИЯ ИЛИ ОБЛЕГЧЕНИЯ В ТРЕНИРОВОЧНОМ ПРОЦЕССЕ СПОРТСМЕНОВ | 2003 |
|
RU2243016C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2006 |
|
RU2319217C1 |

Изобретение относится к универсальным портативным тренажерам. Устройство содержит каркас, включающий в себя стойки, одна из которых - телескопическая, вал, на который насажен барабан с полумуфтой, вторую полумуфту с пружиной механизма прямого и обратного хода, барабан тормозного механизма с тормозной лентой, рычаги, закрепляемые на тормозном барабане под разными углами, трособлочную систему, управляемую и настраиваемую под конкретного спортсмена. Устройство выполнено сборно-разборным, отдельные конструктивные узлы соединяются крепежными элементами, и состоит из трех секций: первая содержит механизмы - тормозной и прямого и обратного хода, вторая - удлинительная и третья - подстроечная. Кроме того, устройство содержит две тросоамортизационные силовые нагрузочные системы: одна - с ручной регулировкой, а другая - с регулировкой посредством привода постоянного тока, в которых слабина тросов выбирается резиновым амортизатором и задается диапазон силовой нагрузки. Также в него введены малогабаритный персональный компьютер, например, типа «Ноутбук» и два цифроаналоговых преобразователя, двигатель постоянного тока, соленоид и периферийные датчики: второй и третий датчики силы, датчики перемещения тормозного барабана и барабана прямого и обратного хода, питаемые электроэнергией от миниатюрного, но достаточно емкого аккумулятора. Периферийные датчики соединены электрически с персональным компьютером через USB-порт. Электродвигатель привода соединен с выходом персонального компьютера через первый цифроаналоговый преобразователь и электрическую схему управления, а соленоид - через второй цифроаналоговый преобразователь и электронный усилитель. 1 з.п. ф-лы, 14 ил.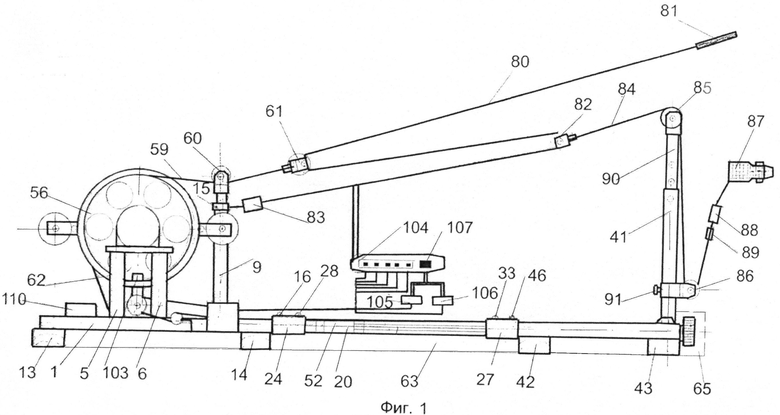
1. Устройство для тренировки спортсменов, содержащее каркас, включающий балки и стойки, одна из которых - телескопическая; вал, на который насажены: первая полумуфта с пружиной, барабан со второй полумуфтой механизма прямого и обратного хода, барабан тормозного механизма с тормозной лентой, рычаги, закрепляемые на тормозном барабане под разными углами, и нагружаемые дополнительной нагрузкой, первый уравнительный блочек, щечки которого соединены с первым тросом, входящим в состав механизма прямого и обратного хода, в который также входит второй трос, намотанный на его барабан в противоположном направлении по отношению к первому тросу, и первый уравнительный блочек, огибаемый третьим тросом, соединенным первым концом с рукояткой, второй уравнительный блочек, через который пропущен третий трос, закрепленный вторым концом через первый датчик силы на стойке, установленной на каркасе ближе к механизму прямого и обратного хода, третий и четвертый уравнительные блочки, закрепленные в верхней и нижней частях упомянутой телескопической стойки соответственно и огибаемые четвертым тросом, одним концом соединенным со щечками второго уравнительного блочка и соединенным другим концом при тренировке на поясе спортсмена, при этом второй указанный трос, помещенный в первую консольную трубу, соединенную с упомянутым каркасом, закрепляется вторым концом на ее выходе через силовой элемент, отличающееся тем, что оно выполнено сборно-разборным, составные части которого соединены крепежными элементами, содержит инерционную и безынерционную системы нагружения спортсмена, включаемые раздельно или вместе, и состоит из трех секций: первая содержит двигательные и нагрузочные узлы устройства, рычаги с упомянутыми грузами для инерционного нагружения спортсмена и дополнительный рычаг с блочком на его конце - для безынерционного нагружения, вторая секция - удлинительная и третья - настроечная, кроме того, устройство содержит два регулируемых узла, один из которых - узел с ручной настройкой, а другой - с настроечным электроприводом постоянного тока, при этом каждый их этих узлов включает резиновый амортизатор и механическую пару «винт-гайка», головки винтов которых выполнены: с насечкой на боковой поверхности в узле ручной настройки и в виде шестеренки - составной части в редукторе зубчатой передачи узла с электроприводом, также дополнительно введены миниатюрный персональный компьютер, два цифроаналоговых преобразователя, двигатель постоянного тока, соленоид, датчик перемещения вала и барабана механизма прямого и обратного хода, все запитываемые электроэнергией от миниатюрного аккумулятора, при этом упомянутые первый и второй датчики силы и введенные датчики перемещения вала и барабана механизма прямого и обратного хода, третий датчик силы, введенный в узел с электроприводом, подключены электрически к миниатюрному персональному компьютеру через USB-порт, а двигатель постоянного тока, электропривод и соленоид подключены к внутренней шине указанного компьютера: первый - через электронный блок управления электродвигателем и первый цифроаналоговый преобразователь, а второй - через электронный усилитель и второй цифроаналоговый преобразователь, при этом узел с электроприводом и часть введенного пятого троса размещены во второй консольной трубе, выполненной квадратного поперечного сечения и закрепленной на каркасе параллельно первой консольной трубе, выполненной также квадратного поперечного сечения, в которой размещен узел с ручной настройкой, причем один конец пятого троса соединен с резиновым амортизатором, а второй - с каркасом через огибаемый им блочек на конце рычага для безынерционного нагружения и через третий датчик силы, и при этом управление процессом тренировки и исследований, регистрация данных с периферических датчиков и обработка информации о параметрах движений спортсмена, углубленная математическая обработка биомеханических характеристик осуществляются с помощью программного обеспечения.
2. Устройство по п.1, отличающееся тем, что в его электрической схеме управления электродвигателя постоянного тока привода содержится: мостовая усилительная электронная схема силового узла, выполненная на транзисторах, управляюще-защитный узел, выполненный на двух микросхемах, а для защиты электродвигателя - два концевых выключателя.
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2000 |
|
RU2178720C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 1995 |
|
RU2135244C1 |
| Устройство для тренировки мышц | 1985 |
|
SU1405856A1 |
| 0 |
|
SU204212A1 | |
| JP 5300951 A, 16.11.1993 | |||

