Настоящее изобретение относится к способу и устройству контроля арифметического логического модуля (АЛМ) в транспортном средстве.
Из заявки DE-A 4438714 известны способ и устройство контроля предусмотренного в транспортном средстве АЛМ, программная структура которого имеет по меньшей мере три уровня. К первому уровню относятся программы, выполняющие управляющую функцию, например управляющие мощностью силового агрегата. Ко второму уровню относятся программы, предназначенные для контроля за правильностью выполнения программ первого уровня. Для этого в рассмотренном в указанной заявке примере выполнения системы регулирования мощности силового агрегата допустимое значение регулируемого рабочего параметра сравнивают с измеренным или полученным путем вычислений фактическим значением этого параметра. К третьему уровню относятся программы или их части, предназначенные для контроля правильности выполнения контролирующих программ, относящихся ко второму уровню. При этом контроль за правильностью выполнения программ второго уровня происходит путем обмена данными в режиме запрос-ответ с модулем защиты (модулем контроля), который контролирует корректность выполнения программ второго уровня на основании результатов, полученных при обмене данными в указанном режиме запрос-ответ (контроль правильности выполнения программ). При обнаружении программами второго уровня и/или модулем контроля по меньшей мере одного отклонения в качестве реакции на подобное отклонение принимаются соответствующие ответные меры, которые в случае управления силовым агрегатом заключаются в отключении подачи рабочего тела либо в ограничении других рабочих параметров.
Для повышения эффективности контроля правильности выполнения программ второго уровня согласно DE-A 19609242 в дополнение к проверке правильности выполнения программ или вместо такой проверки предусмотрено тестирование правильности обработки команд, заключающееся в выполнении выбранных программ или их частей с использованием заданных проверочных данных и проверке полученного или полученных результатов вычислений с точностью до бита в модуле контроля для обнаружения ошибок или отклонений.
Существенным моментом в этих известных технических решениях является то, что программы первого и второго уровня, а также контроль правильности выполнения программ и тестирование правильности обработки команд выполняются в одном единственном АЛМ. При этом контролирующими программами второго уровня должны обрабатываться входные сигналы, являющиеся избыточными по отношению к входным сигналам, обрабатываемым программами первого уровня. В результате удваивается количество датчиков, при этом во избежание использования дополнительных датчиков с учетом различного количества используемых в различных транспортных средствах датчиков контролю поддается лишь малое число сопрягаемых входных сигналов. Помимо этого по мере увеличения различных функций, прежде всего по мере увеличения функций, являющихся определяющими в отношении мощности силового агрегата, например в системах управления двигателей с непосредственным впрыскиванием бензина, качество такого контроля постоянно ухудшается. Примером функции, способной отрицательно влиять на качество контроля, является функция самообучения ограничивающим ход педали акселератора положениям на основании сигналов датчика положения педали акселератора. Если при выполнении этой функции самообучения изменяется, например, установившаяся ошибка или смещение сигнала датчика положения педали акселератора, то указанное изменение необходимо учитывать при контроле путем учета максимальных допусков конечных положений, ограничивающих ход этой педали. Наличие такого относительно большого поля допуска может приводить к снижению качества контроля.
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача разработать такую систему контроля предусмотренного в транспортном средстве АЛМ, которая несмотря на возрастающий объем различных функций обеспечивала бы достаточно высокое качество контроля.
Указанная задача решается с помощью способа контроля арифметического логического модуля (АЛМ) в транспортном средстве, имеющего программные модули, с помощью которых осуществляется воздействие на рабочие характеристики транспортного средства, при этом указанный АЛМ с помощью этих программных модулей формирует на основании по меньшей мере одной входной величины по меньшей мере одну выходную величину для управления по меньшей мере одной функцией транспортного средства. Согласно изобретению, для контроля за корректной работой АЛМ выбирают по меньшей мере один из указанных программных модулей либо по меньшей мере его часть, в АЛМ выполняют с использованием проверочных данных указанный по меньшей мере один выбранный программный модуль, соответственно указанную по меньшей мере одну его часть или копию и результат вычисления, полученный с использованием проверочных данных, сравнивают с заданным результатом для обнаружения ошибок или отклонений.
При этом проверку инициируют с помощью модуля контроля.
Целесообразно наряду с указанной проверкой предусмотреть контроль правильности выполнения указанного по меньшей мере одного выбранного программного модуля, заключающийся в обмене данными с модулем контроля в режиме запрос-ответ и инициируемый этим модулем контроля.
Результат, полученный при проведении указанной проверки и/или контроля правильности выполнения программы, предпочтительно сравнивать в модуле контроля с соответствующим заданным результатом и при недопустимых отклонениях с помощью модуля контроля принимать ответные меры в качестве реакции на подобные отклонения.
В соответствии с изобретением АЛМ предназначается для управления силовым агрегатом транспортного средства, а указанный по меньшей мере один выбранный программный модуль является важным для обеспечения эксплуатационной надежности и безопасности транспортного средства, предпочтительно является определяющим в отношении отдаваемой двигателем мощности, например служит для определения задаваемого водителем воздействия, для регулирования частоты вращения при холостом ходе, для координации момента или для регулирование положения дроссельной заслонки.
Указанный по меньшей мере один выбранный программный модуль, соответственно указанную по меньшей мере одну выбранную его часть предпочтительно отнести в качестве исходной программы к первому уровню АЛМ (уровню 1), а в качестве копии либо в исходном виде для проведения указанной проверки отнести ко второму уровню АЛМ (уровню 1').
Предпочтительно также указанный по меньшей мере один выбранный программный модуль, соответственно указанную по меньшей мере одну выбранную его часть использовать для проверки в виде исходной программы.
Наряду с тестированием правильности обработки команд, заключающимся в проведении проверочного вычисления с использованием исходной программы либо копии исходной программы, и/или наряду с контролем правильности выполнения программы целесообразно осуществить проверку по меньшей мере важных для обеспечения эксплуатационной надежности и безопасности транспортного средства ячеек памяти АЛМ.
Необходимо подчеркнуть, что АЛМ предназначен для управления автоматической коробкой передач, системой регулирования мощности двигателя или тормозной системой с электрическим управлением, предпочтительно тормозной системой с приложением приводного усилия к тормозным колодкам от электродвигателя.
Задача изобретения решается также с помощью предлагаемого в нем устройства контроля арифметического логического модуля (АЛМ) в транспортном средстве, включающего АЛМ, имеющий программные модули, с помощью которых осуществляется воздействие на рабочие характеристики транспортного средства, при этом указанный АЛМ с помощью этих программных модулей формирует на основании по меньшей мере одной входной величины по меньшей мере одну выходную величину для управления по меньшей мере одной функцией транспортного средства. Согласно изобретению, оно характеризуется наличием по меньшей мере одного из указанных программных модулей либо по меньшей мере его части, выбираемых для контроля за корректной работой АЛМ, при этом в АЛМ с использованием проверочных данных выполняется указанный по меньшей мере один выбранный программный модуль, соответственно указанная по меньшей мере одна его часть или копия и результат вычисления, полученный с использованием проверочных данных, сравнивается с заданным результатом для обнаружения ошибок или отклонений.
Предлагаемая в изобретении система контроля АЛМ в транспортном средстве обеспечивает удовлетворительный контроль работы АЛМ даже при увеличении объема его функций и различном количестве используемых в различных транспортных средствах датчиков.
Особое преимущество заключается в возможности отказаться от дополнительного уровня контроля без отклонения от существующих стандартов эксплуатационной надежности и безопасности транспортного средства.
В этом отношении особое преимущество состоит в том, что упрощается процесс разработки системы контроля АЛМ, поскольку ни одна новая функция, важная для обеспечения эксплуатационной надежности и безопасности, не требует наличия соответствующей ей новой контролирующей функции. В результате удается избежать расходов, связанных с разработкой подобной контролирующей функции.
Особые преимущества предлагаемого в изобретении подхода проявляются при использовании этого подхода в системе управления силовым агрегатом, где предусмотрено большое количество функций, являющихся определяющими в отношении отдаваемой ДВС мощности.
Еще одно преимущество предлагаемого в изобретении решения состоит в том, что согласующие функции, которые влияют на функции, являющиеся определяющими в отношении отдаваемой ДВС мощности, не оказывают влияния на качество контроля.
Для тестирования правильности обработки команд заданные шаги вычислений наиболее предпочтительно выбирать из функциональных программ, поскольку в результате удается сократить объем вычислений, не отходя от существующих стандартов эксплуатационной надежности и безопасности транспортного средства.
Наряду с описанным подходом наиболее предпочтительно дополнительно предусмотреть известный из уровня техники контроль, осуществляемый в АЛМ на втором уровне.
Другие преимущества изобретения рассмотрены ниже в последующем описании различных вариантов его осуществления, соответственно в зависимых пунктах формулы изобретения.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
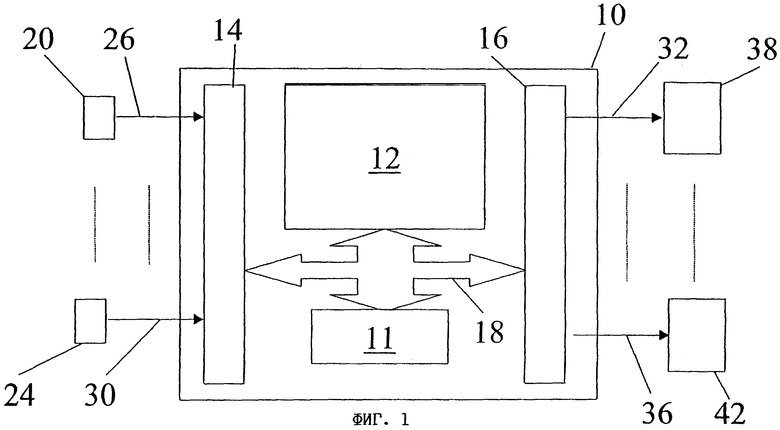
на фиг.1 - общая схема блока управления с АЛМ, управляющего в транспортном средстве по меньшей мере одним рабочим параметром, предпочтительно регулирующего мощность силового агрегата;
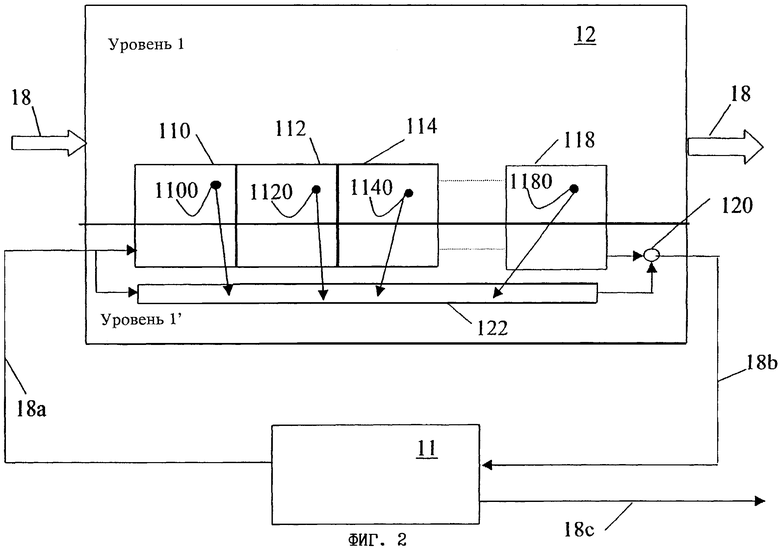
на фиг.2 - схема, поясняющая в качестве примера процесс контроля за работой АЛМ;
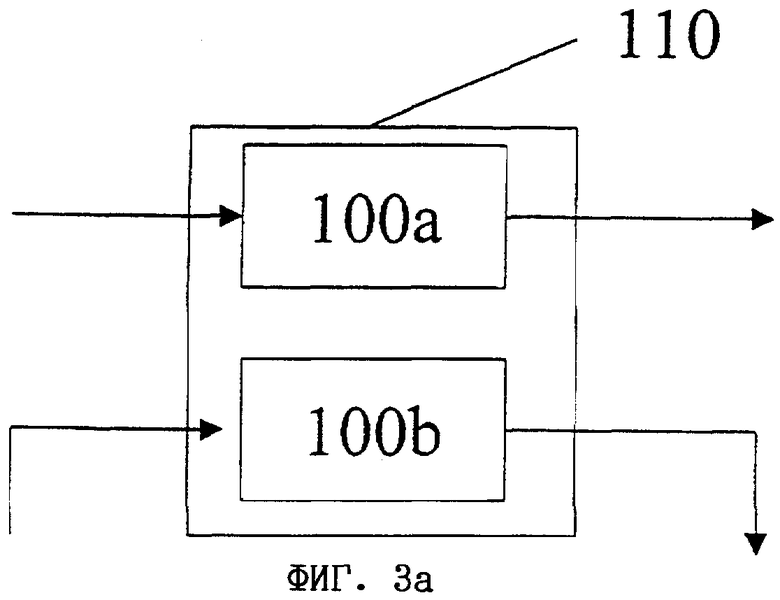
на фиг.3 - схемы, иллюстрирующие два возможных варианта проверки правильности обработки команд.
На фиг.1 показан электронный блок 10 управления, в состав которого входят по меньшей мере арифметический логический модуль (АЛМ) 12, модуль 11 контроля, входной контур 14 и выходной контур 16. Модули памяти являются частью АЛМ 12 или взаимодействуют с ним. С целью обмена данными указанные компоненты соединены друг с другом системой 18 передачи данных. Во входной контур 14 поступают сигналы, которые характеризуют измеренные рабочие параметры силового агрегата, трансмиссии и/или транспортного средства, либо на основании которых можно определить подобные рабочие параметры. Эти сигналы измеряются измерительными устройствами 20-24 и по входным линиям 26-30 поступают во входной контур 14. С выходного контура 16 в свою очередь выдаются управляющие сигналы, по которым исполнительные элементы обеспечивают регулирование по меньшей мере одного рабочего параметра силового агрегата, трансмиссии и/или транспортного средства. Соответствующие управляющие сигналы поступают на исполнительные элементы 38-42 по линиям 32-36.
АЛМ 12 в зависимости от входных сигналов, определяемых на их основании рабочих параметров и/или внутренних величин, формирует по заложенным в него программам значения выдаваемых управляющих воздействий, обеспечивающих регулирование исполнительных элементов в соответствии с заданной стратегией управления. В предпочтительном варианте блок 10 управления представляет собой блок управления силовым агрегатом транспортного средства. В таком блоке управления известным образом определяется положение задействуемого водителем органа управления, после чего полученная информация подвергается обработке и затем вычисляется заданное значение крутящего момента вала силового агрегата. В этом заданном значении крутящего момента учитываются затем поступившие во входной контур 14 заданные значения от других систем управления, таких, например, как противобуксовочная система и/или система управления коробкой передач и т.д., а также сформированные внутренние заданные значения (ограничения и т.д.). В предпочтительном варианте выполнения двигателя внутреннего сгорания (ДВС) это заданное значение преобразуется в последующем в заданное значение положения дроссельной заслонки, в которое последняя устанавливается затем контуром регулирования ее положения. Помимо этого в зависимости от оснащения ДВС предусмотрены дополнительные влияющие на отдаваемую им мощность функции, например управление турбонагнетателем, управление рециркуляцией отработавших газов (ОГ), регулирование частоты вращения при холостом ходе и т.д. Кроме того, в ДВС с непосредственным впрыскиванием бензина на отдаваемую им мощность влияют не только регулирование подачи воздуха, но и регулирование количества впрыскиваемого топлива, регулирование состава горючей смеси, задаваемый режим впрыскивания топлива (предварительное впрыскивание, довпрыскивание), управление подвижной заслонкой, управляющей распределением заряда, и поэтому для такого двигателя наряду с рассмотренными выше необходимо предусматривать множество других программ, влияющих на отдаваемую, соответственно развиваемую ДВС мощность и тем самым на эксплуатационную надежность транспортного средства.
В другом варианте блок 10 управления может использоваться для управления автоматической коробкой передач или тормозной системой, например тормозной системой с приложением приводного усилия к тормозным колодкам от электродвигателя. Для подобных систем также предусмотрены программы, обеспечивающие эксплуатационную надежность и безопасность транспортного средства, например при управлении тормозной системой с этой целью предусмотрено формирование заданной тормозной силы, регулируемая установка заданной тормозной силы для отдельных колесных тормозных механизмов, формирование задаваемого водителем тормозного воздействия на основании сигналов, характеризующих степень нажатия на педаль тормоза, и т.д. Соответствующие важные для обеспечения эксплуатационной надежности и безопасности транспортного средства функции предусмотрены и для системы управления коробкой передач.
В подобных системах управления в принципе необходимо учитывать две возможные категории ошибок. К первой категории относятся ошибки определения или описания и программные ошибки, возникающие при разработке соответствующего управляющего программного обеспечения, а ко второй категории относятся аппаратные ошибки в АЛМ, которые могут проявиться в процессе эксплуатации блока управления. Рассмотренные в начале описания концепции контроля охватывают обе эти категории ошибок. Описанная ниже концепция контроля основана на разделении анализа обеих этих категорий ошибок, при этом в АЛМ контролю подвергаются только аппаратные ошибки. Такой подход позволяет тестировать правильность обработки команд, относящихся к важным для обеспечения эксплуатационной надежности и безопасности функциям, при необходимости в дополнение к тестированию правильности выполнения программы. Благодаря этому отпадает необходимость в относящихся к 2- и 3-му уровням программах, поскольку контроль осуществляется с помощью важных для обеспечения эксплуатационной надежности и безопасности транспортного средства функций, имеющихся на первом уровне (уровень 1'). Наряду с тестированием правильности обработки команд и при необходимости тестированием правильности выполнения программы предусмотрены тесты для проверки памяти, позволяющие проконтролировать исправность памяти АЛМ.
Не затрагиваемые рассмотренной ниже системой контроля системные и программные ошибки необходимо определять с помощью соответствующих мер и исключать на стадии разработки, например путем разработки важных для обеспечения эксплуатационной надежности и безопасности функций и компонентов несколькими разработчиками со взаимным контролем результатов их работы. Кроме того, ошибки подобного типа обнаруживают путем сравнения полученных в ходе разработок результатов с имитационной моделью и таким образом проверяют программное обеспечение на отсутствие в нем ошибок.
В результате для контроля в АЛМ остаются только аппаратные ошибки, благодаря чему в вычислительном устройстве достаточно будет проверять только важные для обеспечения эксплуатационной надежности и безопасности функции, а в системе управления силовым агрегатом - только цепи управления различными влияющими на отдаваемую ДВС мощность функциями и тем самым только модули, влияющие на отдаваемую ДВС мощность. Проверка этих функций, соответственно программных модулей осуществляется путем тестирования правильности обработки команд и при необходимости путем контроля правильности выполнения программы. При тестировании правильности обработки команд модулем 11 контроля для выбранных модулей задаются выбранные контрольные или проверочные данные. Осуществляемые этим модулями контрольные вычисления объединяются в ответное сообщение, передаваемое в модуль 11 контроля. В этом модуле контроля полученные данные сопоставляются с точностью до бита с соответствующими проверочными данными. Если результаты, полученные при тестировании правильности обработки команд, не совпадают с ожидаемыми параметрами, то в качестве реакции на это отклонение принимаются ответные меры, заключающиеся, например, в соответствующем срабатывании модуля контроля, выполненного в виде отдельного блока. Модули памяти (запоминающие устройства с произвольной выборкой (ЗУПВ), постоянные запоминающие устройства (ПЗУ)) блока управления и/или АЛМ тестируются независимо от контроля правильности выполнения функций.
Выполняемый рассмотренным выше способом контроль осуществляется путем выбора отдельных важных для обеспечения эксплуатационной надежности и безопасности программных модулей и/или предусмотренных этими программными модулями шагов вычислений и их привязки в виде копии или путем временного переключения к уровню 1'. В одном из вариантов эта копия сохраняется в модуле памяти. Для снижения нагрузки на вычислительное устройство предпочтительно копировать, соответственно задействовать при тестировании правильности обработки команд только часть программных модулей функционального уровня, прежде всего в тех случаях, когда из отдельных важных для обеспечения эксплуатационной надежности и безопасности программных модулей выбираются и при тестировании правильности обработки команд выполняются лишь отдельные шаги программы, такие как операции сложения, вычитания и т.д.
Проверочные вычисления при тестировании правильности обработки команд целесообразно выполнять лишь ненамного реже, предпочтительно, однако, с той же частотой, что и функциональные вычисления. Максимально быстрая реакция на отклонение обеспечивается благодаря тому, что обнаружение ошибки при тестировании правильности обработки команд приравнивается к наличию сбоя в работе всей системы.
Дополнительно важные для обеспечения эксплуатационной надежности и безопасности функции 1-го уровня контролируются за счет осуществляемой известным образом проверки правильности выполнения программы. В ходе такого контроля правильности выполнения программы модуль контроля посылает выбранные с помощью генератора случайных чисел запросы, которые в ответ обрабатываются выбранными программными модулями или шагами программы 1-го уровня, и после этого полученный сводный результат передается в модуль контроля. Затем этот результат сравнивается в модуле контроля с соответствующим конкретному запросу стандартным или эталонным ответным сообщением. Прекращение обработки таких запросов интерпретируется как сбой.
В предпочтительном варианте выполнения системы управления силовым агрегатом важными для обеспечения эксплуатационной надежности и безопасности транспортного средства являются модули обработки сигналов, характеризующих положение педали акселератора, модули контроля регулятора положения дроссельной заслонки, модули для тестирования аналого-цифрового преобразователя, модули координации заданных моментов, модули регулирования частоты вращения при холостом ходе, модули регулирования положения дроссельной заслонки и т.д.
Наряду с тестированием правильности обработки команд и контролем правильности выполнения программы в предпочтительном варианте осуществляется экспресс-контроль модулей памяти по меньшей мере в отношении важных для обеспечения эксплуатационной надежности и безопасности программных модулей. Проверка памяти выполняется при этом с небольшими временными интервалами. В качестве примера соответствующего контроля модулей памяти можно назвать двойное сохранение в ЗУПВ информации с дополнением либо соответствующую проверку важных ячеек модуля памяти. Аналогичный подход используется и для проверки ПЗУ блока 10 управления.
Выполняемый рассмотренным выше способом контроль обеспечивает корректную работу АЛМ и эффективное распознавание аппаратных ошибок в этом АЛМ. В еще большей степени повысить качество контроля позволяет дополнительный контроль правильности выполнения программы, который с помощью дополнительного контроля модулей памяти совместно с указанной функцией контроля обеспечивает в целом надежный и качественный контроль АЛМ.
Ниже предпочтительный вариант выполнения изобретения проиллюстрирован на примере схематично показанной на фиг.2 системы управления ДВС.
На фиг.2 схематично изображен АЛМ 12, а также отдельный модуль 11 контроля. Важные для обеспечения эксплуатационной надежности и безопасности функции, соответственно программные модули условно обозначены позициями 110, 112 и 114-118. В АЛМ по системе 18 передачи данных поступают величины, на основании которых в непоказанных программных модулях определяются величины, которые используются программными модулями, важными для обеспечения эксплуатационной надежности и безопасности транспортного средства, т.е. определяющими отдаваемую ДВС мощность. Помимо этого АЛМ выдает по системе 18 передачи данных на исполнительные элементы управляющие сигналы, величина которых определяется по меньшей мере одним из программных модулей 110-118. На чертеже не показаны также необходимые в данном случае промежуточные шаги и промежуточные вычисления, выполняемые непоказанными программными модулями при формировании управляющих сигналов.
В предпочтительном варианте выполнения системы управления ДВС выбранные программные модули 110-118 представляют собой программы, определяющие отдаваемую ДВС мощность. Так, например, программный модуль 110 определяет положение педали акселератора и формирует задаваемое водителем воздействие, модуль 112 координирует крутящий момент, модуль 114 регулирует частоту вращения при холостом ходе, а модуль 118 регулирует положение дроссельной заслонки. Последний выдает затем на основании полученных другими модулями промежуточных результатов управляющий сигнал, определяющий отдаваемую ДВС мощность. Наряду с этим предусмотрены и другие важные для обеспечения эксплуатационной надежности и безопасности транспортного средства программные модули, которые, однако, для упрощения не показаны на фиг.2, например модули тестирования аналого-цифрового преобразователя, контроля регулятора дроссельной заслонки, обработки сигналов, характеризующих положение дроссельной заслонки, и т.д.
На фиг.2 проиллюстрированы далее описанный выше способ контроля АЛМ 12 и его взаимодействие с модулем 11 контроля. На чертеже представлены два имеющихся в АЛМ 12 программных уровня, а именно уровень 1, к которому относятся программы (например 110-118), осуществляющие функцию управления, а также уровень 1', к которому относятся программы 110-118, их части или копии, лежащие в основе осуществления функции контроля. АЛМ 12 связан с модулем 11 контроля системой 18 передачи данных, что представлено на фиг.2 линиями 18а и 18b. Помимо этого при обнаружении ошибки или отклонения модуль 11 контроля по системе 18 передачи данных воздействует, что условно обозначено линией 18с, на систему управления, переключая ее на аварийный режим или ограничивая ее управляющие функции.
Представленные на чертеже программы 110-118 оказывают важное влияние на рабочие характеристики транспортного средства с точки зрения его эксплуатационной надежности и безопасности, поскольку они влияют на отдаваемую силовым агрегатом мощность независимо от задаваемого водителем воздействия. Представленные программы, являясь функциональными программами, относятся к уровню 1 и отрабатываются на этом уровне в качестве управляющих программ. С помощью этих программ осуществляется известный из уровня техники контроль правильности выполнения программы, инициируемый модулем 11 контроля по линии 18а путем обмена данными в режиме запрос-ответ. По этой причине программы 110 и 118 являются также частью контролирующего уровня 1' АЛМ 12. Сводное ответное сообщение, в формировании которого в ответ на поступивший от модуля 11 контроля запрос участвуют все выбранные программные модули, через логический элемент 120, в котором результат, полученный при контроле правильности выполнения программы, может быть логически скомбинирован с результатом, полученным при тестировании на выбранных программах правильности обработки команд, поступает по линии 18b в модуль 11 контроля. Модуль 11 контроля после этого проверяет правильность принятого результата путем его сравнения с заданным значением и при недопустимых отклонениях инициирует принятие соответствующих ответных мер в качестве реакции на подобные отклонения (по линии 18с).
Тестирование правильности обработки команд выполняется, как это известно из представленного в начале описания уровня техники, на основе заданных проверочных данных в условно обозначенном блоке 122. В памяти АЛМ 12 при этом предпочтительно хранить несколько наборов проверочных данных, которые выбираются модулем 11 контроля по соответствующей команде. Правильность обработки команд тестируется на выбранных программах, которые оказывают важное влияние на эксплуатационную надежность и безопасность транспортного средства, прежде всего являются определяющими в отношении отдаваемой двигателем мощности. В рассматриваемом примере такими программами являются программы 110-118. В зависимости от конкретного варианта тестированию на правильность обработки команд в блоке 122 могут подвергаться все программы, при этом при проведении подобного тестирования либо вся программа прогоняется полностью с использованием проверочных данных либо, как это показано на фиг.2, выполняются только выбранные части или шаги 1100-1180 программы. При этом из каждой программы выбираются, например, определенные ее шаги, в частности операции сложения, вычитания или умножения. Выбранные шаги или части программы копируются в блок 122 тестирования правильности обработки команд или остаются в исходной программе и затем для проверки правильности обработки команд выполняются (либо в копии, либо в исходном варианте) с использованием проверочных данных. Полученный при таком тестировании результат передаются через логический элемент 120 по линии 18b в модуль 11 контроля. Наряду с тестированием правильности обработки команд и контролем правильности выполнения программы осуществляется описанная выше проверка памяти.
Вместо копии исходной программы или ее частей в другом варианте для проверочных вычислений используют саму исходную программу. Необходимое при этом переключение является частью уровня 1'.
На фиг.3 на примере программы 110 проиллюстрированы два возможных варианта осуществления предлагаемого способа. Согласно фиг.3а, копируется вся программа 110 или отдельные ее шаги, при этом тестирование правильности обработки команд осуществляется на основании копии 110b. Сама же исходная программа 110а, обеспечивающая выполнение рабочих функций, при этом не затрагивается.
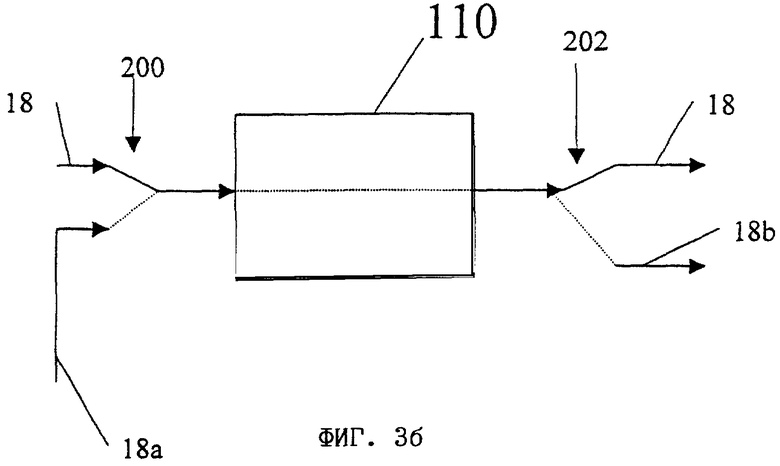
Во втором варианте, показанном на фиг.3б, используется только один экземпляр программы 110, являющейся оригиналом. При наступлении условий (предпочтительно по достижении заданного момента времени), на основании которых начинается тестирование на правильность обработки команд, переключательные элементы 200 и 202 переключаются в положение, показанное пунктирной линией. После этого программа 110 выполняется с использованием не реально поступающих данных (18), а проверочных данных (18а), и затем полученный результат выдается для проверки в модуль 11 контроля (18b). Наряду с прогоном всей программы 110 для тестирования правильности обработки команд в качестве основы для подобного тестирования выбираются части, соответственно шаги исходной программы 110.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА, СПОСОБ УПРАВЛЕНИЯ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМОЙ, А ТАКЖЕ ПРИМЕНЕНИЕ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ | 2011 |
|
RU2585262C2 |
| СПОСОБ ГЕНЕРИРОВАНИЯ КОНТРОЛЬНОГО СИГНАЛА С ИСПОЛЬЗОВАНИЕМ КОНТРОЛИРУЮЩЕГО СРЕДСТВА ИЛИ МОДУЛЯ БЕЗОПАСНОСТИ | 2015 |
|
RU2705053C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГЕНЕРИРОВАНИЯ СЦЕНАРИЯ ДЛЯ ПРОВЕРКИ ПРАВИЛЬНОСТИ ФУНКЦИОНАЛЬНОГО ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ СИСТЕМЫ, УСТАНОВЛЕННОЙ НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА, И УСТРОЙСТВО ДЛЯ ПРИМЕНЕНИЯ СПОСОБА | 2008 |
|
RU2473115C2 |
| СПОСОБ И СИСТЕМА ТЕСТИРОВАНИЯ DVD-ПЛЕЕРА | 2003 |
|
RU2312387C2 |
| Автоматизированная оценка безопасности критически важных для бизнеса компьютерных систем и ресурсов | 2011 |
|
RU2657170C2 |
| УСТРОЙСТВО СОЗДАНИЯ ДОВЕРЕННОЙ СРЕДЫ ДЛЯ КОМПЬЮТЕРОВ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ | 2014 |
|
RU2569577C1 |
| СПОСОБ ПЕРЕДАЧИ И КОМПЛЕКСНОЙ ЗАЩИТЫ ИНФОРМАЦИИ | 2007 |
|
RU2367007C2 |
| Устройство контроля за управлением локомотивом | 2022 |
|
RU2790738C1 |
| СИСТЕМА ДЛЯ ПРОВЕРКИ ЦЕЛОСТНОСТИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2721185C2 |
| Программно-аппаратная платформа и способ ее реализации для беспроводных средств связи | 2016 |
|
RU2626550C1 |
Изобретение относится к способу и устройству контроля арифметического логического модуля (АЛМ) в транспортном средстве. Технический результат заключается в возможности создания системы контроля АЛМ транспортного средства, которая несмотря на возрастающий объем различных функций обеспечивала бы достаточно высокое качество контроля. Согласно изобретению АЛМ, предусмотренный в транспортном средстве, имеет программные модули, с помощью которых осуществляется воздействие на рабочие характеристики транспортного средства. При этом указанный АЛМ с помощью этих программных модулей формирует на основании, по меньшей мере, одной входной величины, по меньшей мере, одну выходную величину для управления, по меньшей мере, одной функцией транспортного средства. Для контроля за корректной работой АЛМ выбирается, по меньшей мере, один программный модуль или, по меньшей мере, одна его часть. Этот, по меньшей мере, один выбранный модуль, соответственно эта, по меньшей мере, одна выбранная его часть или копия выполняется в АЛМ с использованием проверочных данных и полученный результат сравнивается с заданным результатом для обнаружения ошибок или отклонений. 2 н. и 8 з.п. ф-лы, 3 ил.
| DE 19653429 A1, 16.07.1998 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| DE 19609242 A1, 11.09.1997 | |||
| US 5043984 A, 27.08.1991 | |||
| DE 4438714 A1, 02.05.1996 | |||
| RU 94029320 A1, 20.06.1996. | |||

