Предлагаемая группа изобретений относится к области высокоточного оружия - управляемых снарядов (УС) - и может быть использована в качестве:
- УС с воздушно-динамическим рулевым приводом (ВДРП) при реализации различных методов наведения на цель;
- блока рулевого привода для УС (преимущественно для УС с большой дальностью полета);
- пневмораспределительного устройства (ПРУ), преобразующего команды управления системы управления УС в соответствующие для ВДРП сигналы, обеспечивающие потребные отклонения аэродинамических рулей УС;
- механизма инициирования ВДРП, осуществляющего раскрытие аэродинамических рулей и разгерметизацию пневмосистемы ВДРП по команде системы управления УС.
В условиях постоянно действующей тенденции увеличения дальности стрельбы УС возрастает длительность управляемого полета. Возрастание времени работы рулевого привода требует размещения в отсеке управления УС мощного бортового источника питания (пороховой или воздушный аккумуляторы давления, электрические батареи), что приводит к увеличению его габаритов и массы. При заданных габаритах УС увеличение габаритов и массы рулевого привода уменьшают массу и габариты полезной нагрузки, что существенно ухудшает тактико-технические характеристики УС в целом.
В этой связи определенное преимущество имеют ВДРП, использующие в качестве источника питания обтекающий УС воздушный поток и обеспечивающие, тем самым, высокую дальность полета УС: ВДРП функционирует пока движется УС.
Известен управляемый снаряд «Коперхэд», являющийся аналогом представленного технического решения. Он содержит головку самонаведения и размещенную в головном корпусе аппаратуру управления, боевую часть и хвостовой отсек (отсек управления), состоящий из блока электропитания и рулевого привода с его аппаратурой управления. Снаряд выполнен по «нормальной» аэродинамической схеме: складывающиеся в корпус хвостового отсека аэродинамические стабилизаторы установлены в передней части хвостового отсека, а газовый рулевой привод со складывающимися аэродинамическими рулями закреплен к донной стенке хвостового отсека (Р.А. Налк, Х.Л. Пастрик, Ф.А. Моррисон. Разработка полуактивной лазерной системы наведения снаряда „Коперхэд". Ракетная техника и космонавтика, т. 18, №2, 1980, С. 128-138).
Наиболее близким к заявляемому управляемому снаряду по совокупности существенных признаков и достигаемому эффекту является принятый за прототип УС, описанный в патенте РФ №2184927 МПК F42B 15/01. Он содержит корпус, закрепленный в корпусе блок рулевого привода и шпангоут с радиальными отверстиями, в которых установлены валы, соединяющие цапфы, выполненные с боковыми рычагами, кинематически связанными тягами с выходными рычагами блока рулевого привода, и шарнирно установленные в торцевых пазах цапф аэродинамические рули.
Недостаток приведенных выше устройств - ограниченная дальность полета УС, обусловленная использованием в конструкции газового рулевого привода. Увеличение дальности полета УС потребует увеличения объема источника питания газового рулевого привода, что отрицательно скажется на габаритно-массовых характеристиках УС.
Известен блок рулевого привода (БРП) УС (патент РФ №2248519 МПК F42B 15/00), содержащий мембранные пневмодвигатели с электромагнитным распределительным устройством и поршнями, выполненными в виде жестких центров мембран, снабженных штоками с узлом центровки и кинематически связанными рычагами с осью аэродинамических рулей.
Очевидно, что диаметры поршней рулевых машин в этом устройстве в пределе ограничены радиусом внутреннего миделевого сечения корпуса отсека УС (rm), что ограничивает величину основного конструктивного параметра, определяющего развиваемый момент пневмодвигателя:

где: Sп - площадь поршня рулевой машины;
L=0,5⋅rm - плечо приложения развиваемого пневмодвигателем усилия относительно оси рулей.
Кроме того, размещение рулевых машин вдоль корпуса увеличивает длину и массу УС.
Наиболее близким к заявляемому блоку рулевого привода УС по совокупности существенных признаков и достигаемому эффекту является принятый за прототип блок рулевого привода УС, описанный в патенте РФ №2121648 МПК F42В 15/00), содержащий электромагнитные пневмораспределительные устройства, сообщенные с поршневыми рулевыми машинами, которые размещены по разные стороны от оси аэродинамических рулей.
Однако, и в этом случае действие зависимости (1) ограничивает развиваемый момент, а, следовательно, и мощность БРП.
В рулевых приводах УС широко применяется пневмораспределительное устройство типа «струйная трубка»: в известном блоке рулевого привода УС (патент РФ №2224214 МПК F42B 15/01) распределение рабочего потока в пневмосистеме рулевого привода осуществляет поворотная «струйная трубка», закрепленная на оси управляющего электромагнита (УЭМ).
Недостаток данного ПРУ - возникновение момента нагрузки на УЭМ при отклонении «струйной трубки» из среднего положения за счет действия воздушной струи. Свойственные данному виду рулевого привода значительные расходы воздуха в пневмосистеме при высоких скоростях полета современных УС обусловливают увеличение момента нагрузки на УЭМ, а, следовательно, его габаритов и мощности.
Наиболее близким к заявляемому ПРУ по совокупности существенных признаков и достигаемому эффекту является, принятое за прототип, пневмораспределительное устройство, описанное в патенте патент РФ №2121648 МПК F42B 15/00. Данное пневмораспределительное устройство содержит корпус, управляющий электромагнит с поворотным якорем, закрепленный на оси якоря рычаг с расположенными по обе стороны от оси клапанами, каналы пневмосистемы. Такое техническое решение позволяет реализовывать рулевой привод с различной топологией пневмосистем, однако значительно увеличивает момент нагрузки на управляющий электромагнит, что связано с давлением воздушного потока на заслонку.
Известен механизм инициирования рулевого привода, который содержит механизм раскрытия и фиксации складывающихся в корпус УС аэродинамических рулей, описанный в патенте РФ №2166727, МПК F42B 15/01. Он размещен в установленных на шпангоуте и кинематически связанных с рулевыми машинами валах и выполнен в виде связывающей валы оси с пиропатроном и поршней, расположенных в центральных отверстиях валов между торцами оси и задними кромками установленных на осях складывания рулей. При этом в оси выполнены каналы, сообщающие камеру пиропатрона с камерами поршней.
Недостаток данного механизма - низкая надежность раскрытия и фиксации аэродинамических рулей, что обусловлено утечками газа, образующегося при срабатывании пиропатрона, по микрозазорам в штифтовых соединениях оси с валами (штифты частично находятся в рабочих камерах поршней), а также возможным перекрытием каналов, сообщающих камеру пиропатрона с камерами поршней, мембраной пиропатрона, которая герметизирует его рабочий торец (пороховую навеску) и удаляется под действием давления газа, образующегося при воспламенении пороховой навески.
Известен, принятый за прототип, механизм инициирования рулевого привода, описанный в патенте РФ №2196295, МПК F42B 15/01. Он содержит механизм раскрытия и фиксации аэродинамических рулей с поршневым газовым двигателем, пиропатроном и подпружиненными фиксаторами, размещенными в осевых каналах цапф. В отличие от выше рассмотренного аналога для обеспечения раскрытия и фиксации аэродинамических рулей при проведении технологических проверок и испытаний системы управления УС в конструкцию механизма раскрытия и фиксации аэродинамических рулей введены цилиндрические фиксаторы, размещенные в центральных отверстиях приводных валов между поршнями и рулями, и пружины, установленные между поршнями и фиксаторами.
Однако прототип имеет те же недостатки, отмеченные ранее при анализе конструкции вышеприведенного аналога. Основной же недостаток двух рассмотренных выше конструкций механизмов инициирования рулевого привода, - отсутствие функции раскрытия воздухозаборников применительно к ВДРП.
Заявляется группа изобретений, которая решает общую задачу - увеличение дальности полета УС за счет реализации отсека управления с двухканальным воздушно-динамическим рулевым приводом при снижении массы и габаритов отсека управления УС.
Для решения данной задачи в управляемом снаряде, содержащем корпус, закрепленный в корпусе блок рулевого привода и шпангоут с радиальными отверстиями, в которых установлены валы, соединяющие цапфы, выполненные с боковыми рычагами, кинематически связанными тягами с выходными рычагами блока рулевого привода, и шарнирно установленные в торцевых пазах цапф аэродинамические рули, новым является то, что блок рулевого привода выполнен воздушно-динамическим и соединен со шпангоутом шпильками, установленными вдоль оси управляемого снаряда и закрепленными на внутренних уступах поверхности корпуса. Тяги, соединяющие выходные рычаги блока рулевого привода с рычагами цапф, выполнены с возможностью их регулирования и размещены в секторе между соседними цапфами. Между блоком рулевого привода и шпангоутом размещен механизм инициирования рулевого привода, в котором между аэродинамическими рулями с возможностью осевого перемещения размещены цилиндрические воздухозаборники. Напротив воздухозаборников в корпусе выполнены отверстия, герметизированные заглушками. Оси размещенных симметрично между аэродинамическими рулями воздухозаборников расположены перпендикулярно продольной оси снаряда. С противоположной стороны шпангоута закреплена аппаратура управления рулевым приводом.
Для решения данной задачи в блоке рулевого привода управляемого снаряда, содержащем электромагнитные пневмораспределительные устройства, сообщенные с поршневыми рулевыми машинами, новым является то, что на каждой рулевой машине закреплены пневмораспределительное устройство, датчик обратной связи и узел центровки штока поршня рулевой машины. Узел центровки штока выполнен с опорой для оси рычага, на одном конце которого выполнена сфера, установленная в отверстии штока, а другой конец - кинематически связан с осью аэродинамических рулей. Сообщение пневмораспределительного устройства с рулевой машиной осуществляется посредством каналов пневмосистемы. Каждая рулевая машина выполнена в виде пневмодвигателя, состоящего из двух жестко связанных дисков, между которыми закреплена мембрана с поршнем в виде жесткого центра со штоком. Внутри дисков относительно линии разъема образованы круговые рабочие полости. По внешнему периметру дисков выполнены отверстия каналов пневмосистемы и отверстия крепления пневмопривода. Пневмодвигатели установлены соосно штоками навстречу друг другу с обеспечением параллельности штоков и соосности отверстий каналов пневмосистемы. Датчик обратной связи выполнен в виде фотодиодной и светодиодной линеек и размещенной между ними шторки, закрепленной на штоке поршня пневмодвигателя. Пневмодвигатели в блоке рулевого привода установлены на ограничительных втулках и скреплены между собой шпильками. На одном из пневмодвигателей со стороны, противоположной выходному отверстию штока, выполнены установочные бобышки. Диски силовых цилиндров пневмодвигателей выполнены равными по диаметру внутреннему диаметру корпуса снаряда.
Для решения данной задачи в пневмораспределительном устройстве рулевого привода управляемого снаряда, содержащем корпус, управляющий электромагнит с поворотным якорем, закрепленный на оси якоря рычаг с расположенными по обе стороны от оси клапанами, каналы пневмосистемы, новым является то, что каналы пневмосистемы выполнены в корпусе, закрепленном с управляющим электромагнитом на общем основании. В корпусе напротив клапанов выполнены регулируемые воздуховоды, сообщающиеся с входным и выходными каналами пневмосистемы. В клапанах выполнены глухие полости, ориентированные открытой стороной к воздуховодам. Корпус пневмораспределительного устройства выполнен в виде усеченного сегмента с наружным диаметром, равным внутреннему диаметру корпуса снаряда. Регулируемые воздуховоды выполнены в виде двух симметричных относительно оси корпуса пар пазов. Входной канал выполнен на оси симметрии корпуса параллельно оси сегмента и сообщен с верхними пазами цилиндрическими боковыми каналами. Выходные каналы сообщаются с нижними пазами. На оси якоря установлена пружина с регулируемым предварительным поджатием.
Для решения данной задачи в механизме инициирования рулевого привода управляемого снаряда, содержащем механизм раскрытия и фиксации аэродинамических рулей с поршневым газовым двигателем, пиропатроном и подпружиненными фиксаторами, размещенными в осевых каналах цапф, новым является то, что в механизм инициирования рулевого привода введен механизма раскрытия воздухозаборников. Механизм раскрытия и фиксации рулей и механизм раскрытия воздухозаборников размещены в закрепленном в верхней части шпангоута управляемого снаряда прямоугольном корпусе, в котором вдоль продольной оси управляемого снаряда выполнены рабочая камера пиропатрона и сообщенный с ней отверстием силовой цилиндр газового двигателя. Поршень газового двигателя соединен штоком с фиксатором аэродинамических рулей в сложенном положении, выполненным в виде трубки с продольными пазами для размещения задних кромок рулей и закрепленной на противоположном конце гайкой, контактирующей с прорезями на концевых кромках рулей. Перпендикулярно продольной оси снаряда выполнены сообщенные с силовым цилиндром отверстиями в его стенках каналы, в которых установлены цилиндрические воздухозаборники. К нижней плоскости шпангоута соосно с ним закреплена крестовина с цилиндрической направляющей, ограничителем перемещения фиксатора рулей в сложенном положении и центральным отверстием для штока, закрепленного разрывным штифтом в основании крестовины. В валах по оси управляемого снаряда выполнены отверстия, через которые пропущен шток, соединяющий поршень газового двигателя с фиксатором рулей. Каждый воздухозаборник выполнен в виде полого цилиндра с торцевыми стенками, на наружной цилиндрической поверхности которого со стороны газового двигателя выполнены обнижение и радиальные отверстия, а с другой - выведенный в полость воздухозаборника радиальный паз.
Конструкции заявляемых устройств пояснены чертежами, где представлены:
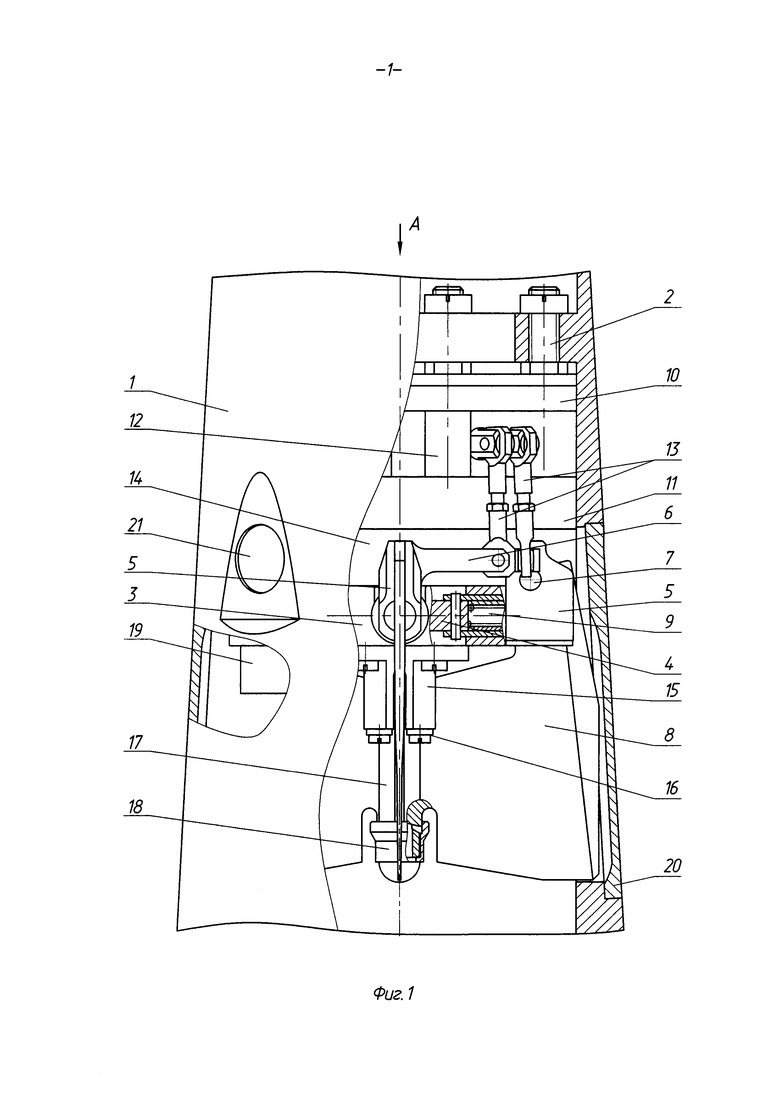
на фиг. 1 - общий вид УС по месту расположения отсека управления с частичным разрезом;
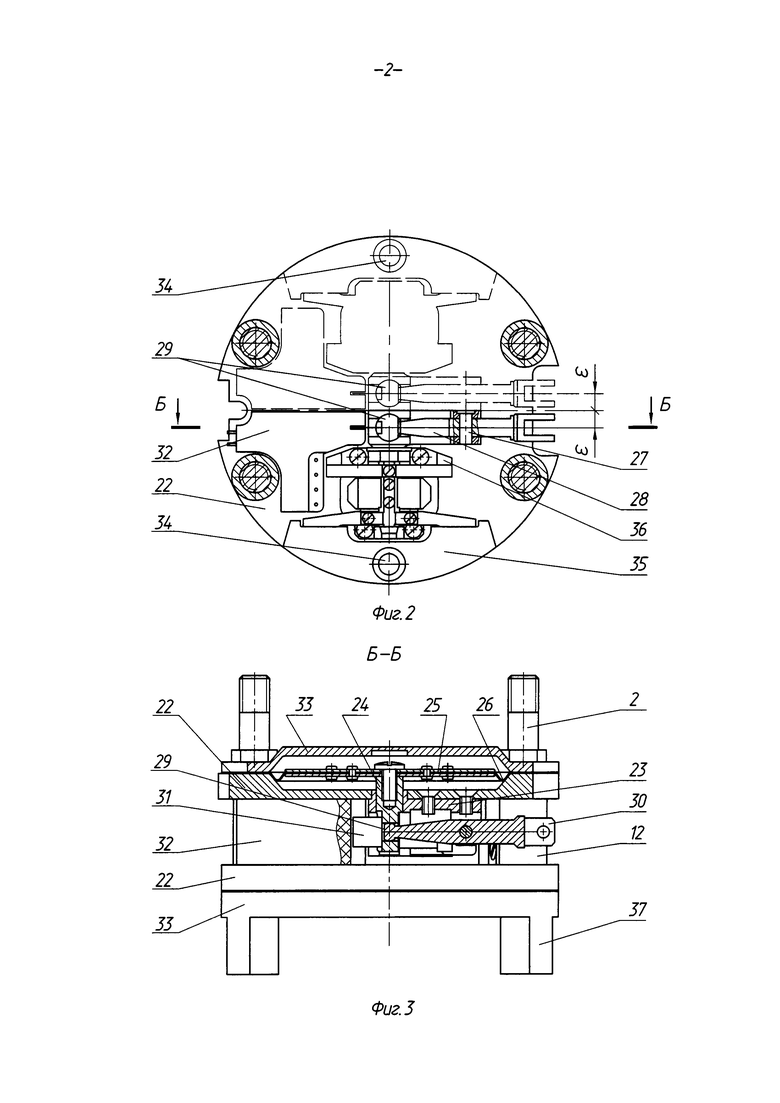
на фиг. 2 - вид сверху на двухканальный рулевой привод;
на фиг. 3 - разрез Б-Б рулевого привода по одному из пневмодвигателей с его кинематической передачей;
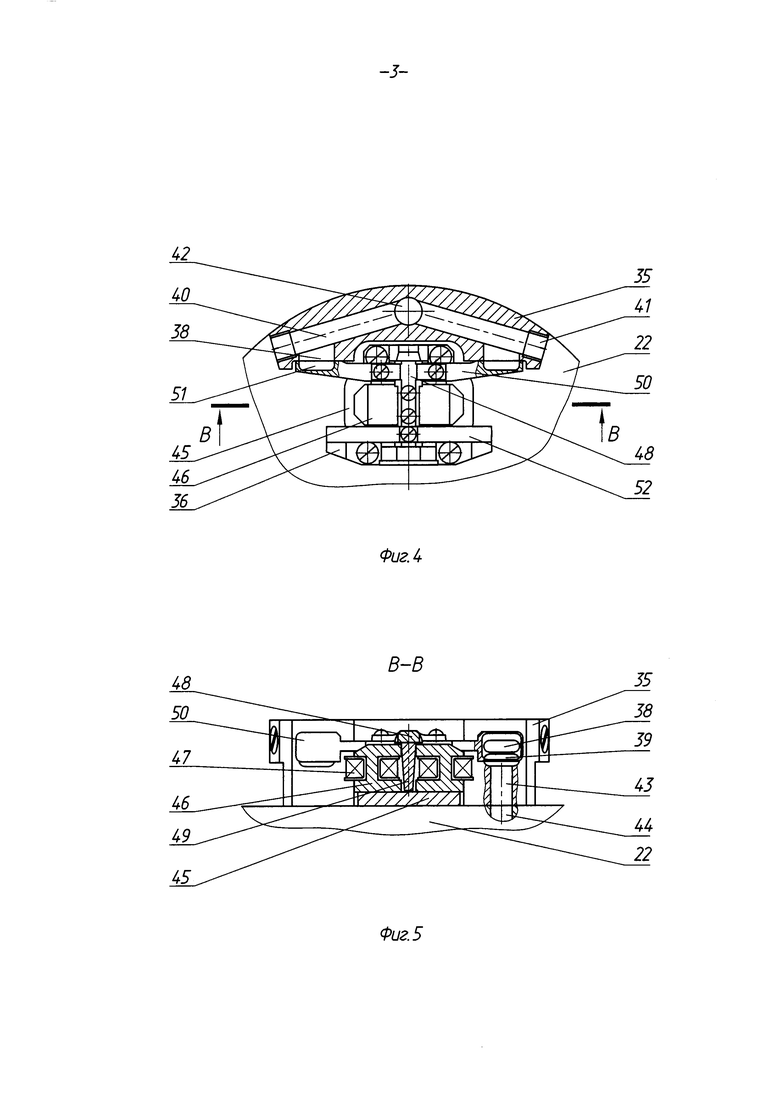
на фиг. 4 - вид сверху на ПРУ с местным разрезом по каналам пневмосистемы;
на фиг. 5 - разрез В-В по УЭМ ПРУ.
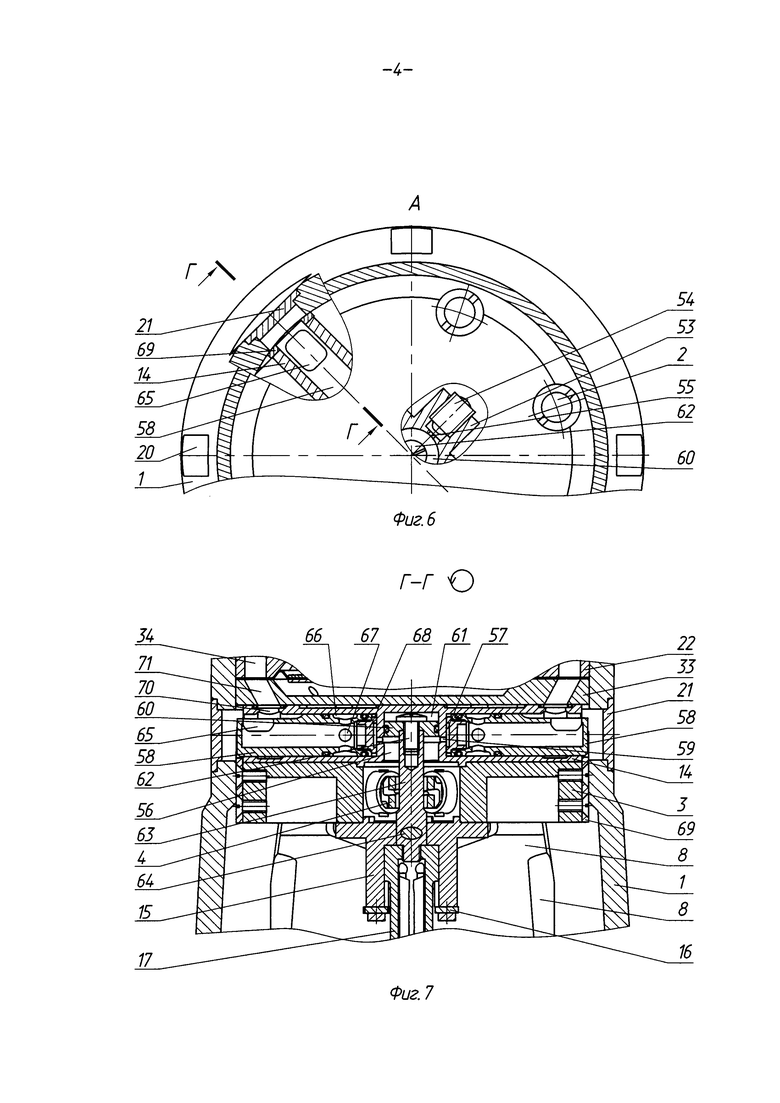
на фиг. 6 - вид А на УС с переднего торца отсека управления с местным разрезом по месту расположения одного из воздухозаборников рулевого привода;
на фиг. 7 - продольный разрез Г-Г механизма инициирования рулевого привода.
К внутренними уступами корпуса 1 (см. фиг. 1) двуканального отсека управления УС посредством шпилек 2, закреплен шпангоут 3, во взаимоперпендикулярных радиальных отверстиях которого валами 4 жестко связаны цапфы 5, две из которых в разных каналах выполнены с боковыми рычагами 6. В торцевых пазах цапф 5 на осях 7 с возможностью складывания в корпус 1 установлены аэродинамические поворотные рули 8. В раскрытом положении рули 8 стопорятся подпружиненными фиксаторами 9.
Верхний 10 и нижний 11 пневмоприводы закреплены между внутренними уступами корпуса 1 и шпангоутом 3 шпильками 2 через ограничительные втулки 12.
Боковые рычаги 6 цапф 5 кинематически связаны шарнирными регулируемыми тягами 13 с рычагами пневмоприводов. Регулировкой длины тяг 13 устанавливается требуемый угол отклонения рулей 8.
Корпус механизма инициирования привода 14 закреплен на переднем торце шпангоута 3.
На заднем торце шпангоута 3 по центру закреплена крестовина 15 с ограничителями 16 перемещения фиксатора рулей в сложенном положении 17, на торце которого навинчена гайка 18, контактирующая внутренней поверхностью с прорезями на концевых кромках рулей 8, удерживая рули 8 в сложенном положении.
В секторах между сложенными рулями 8 на заднем торце шпангоута 3 закреплена аппаратура управления приводом 19.
Корпус 1 выполнен с продольными пазами, которые закрывают щитки 20, и двумя герметизированными заглушками 21 отверстиями для выхода воздухозаборников.
Двухканальный БРП (см. фиг. 2 и 3)) выполнен в виде двух идентичных пневмоприводов, установленных дисками 22 навстречу друг другу между ограничительными втулками 12 и связанных шпильками 2. Диск 22 каждого пневмопривода выполнен равным по диаметру внутреннему диаметру корпуса 1 с эксцентрической (ε) относительно оси диска круговой внутренней рабочей полостью пневмопривода, и с центральным отверстием под узел центровки 23 штока 24 поршня 25 мембраны 26.
Смещение 8 обеспечивает размещение двух идентичных пневмоприводов дисками 22 навстречу друг другу, что существенно уменьшает длину всего двухканального БРП по продольной оси УАС. При этом по сравнению с рассмотренными выше известными двухпозиционными БРП, имеющими ограничение (1), смещение ε дает возможность реализовать основной конструктивный параметр пневмодвигателя Sп⋅L в значительно больших пределах:

Узел центровки штока 24 закреплен на внешней стороне диска 22 и выполнен с опорой для оси 27 рычага 28, на одном конце которого выполнена сфера 29, установленная в отверстии штока 24, а на другом - образован узел 30 кинематической связи с рулями 8. На штоке 24 закреплена шторка 31 датчика обратной связи 32.
Мембрана 26 закреплена диаметрально равным диску 22 нижним диском 33, выполненным с аналогичной круговой рабочей полостью пневмопривода.
По внешнему периметру дисков 22 и 33 кроме отверстий крепления пневмодвигателей в виде отверстий выполнены каналы пневмосистемы 34, обеспечивающие поступление воздуха в ПРУ пневмоприводов первого и второго каналов. Каждое ПРУ состоит из корпуса 35 и УЭМ 36, закрепленных на дисках 22.
По угловой координате пневмоприводы установлены с обеспечением параллельности рабочих плоскостей выходных рычагов 28.
Для позиционирования двухпозиционного БРП в отсеке управления на диске 33 нижнего пневмопривода 11 по местам отверстий крепления выполнены установочные бобышки 37.
Корпус 35 ПРУ (см. фиг. 4 и 5) выполнен в виде усеченного с боков сегмента, радиус которого равен внутреннему радиусу корпуса отсека управления. Симметрично относительно плоскости симметрии сегмента на его плоскости выполнены две пары регулируемых воздуховодов в виде пазов, каждая из которых включает верхний 38 и нижний 39 пазы.
Верхние пазы 38 боковыми каналами 40, герметизированными с боковых поверхностей корпуса 35 заглушками 41, сообщены с центральным входным каналом 42, выполненным в корпусе 35 и соосными отверстиям каналов пневмосистемы 34.
Нижняя пара пазов 39 сообщена с выходными каналами 43 ПРУ, выполненными с опорной плоскости корпуса 35. В составе блока рулевого привода каждый канал 43 сообщен каналом 44 с одной из рабочих полостей пневмодвигателя.
Конструктивно базовая деталь УЭМ - основание 45, на котором закреплены магнитопроводы 46 с обмотками 47. Между магнитопроводами 46 на оси 48 закреплены якорь 49 и рычаг 50, в котором симметрично по обе стороны от оси 48 выполнены клапаны в виде отражателей с внутренними глухими полостями 51. При этом рычаг 50 ориентирован открытой стороной глухих полостей 51 к плоскости корпуса 35 и установлен относительно нее с микро зазором (с целью минимизации утечек воздуха в зазоре) с возможностью попеременного сообщения глухими полостями 51 клапанов каждой пары пазов 38 и 39 при максимальном угле повороте якоря 49.
Для регулировки динамических характеристик УЭМ ПРУ (время движения якоря 49 при максимальном ходе, не симметрия времен движения якоря 49 при максимальном ходе к упорам магнитопроводов 46) на оси 48 закреплена пружина 52 с регулируемым предварительным поджатием.
Прямоугольный корпус 14 механизма инициирования рулевого привода управляемого снаряда (см. фиг. 6, 7 и 1) выполнен с боковым приливом 53, закреплен на переднем торце шпангоута 3 под углом 45° по отношению к осям рулей 8 и расположен между шпангоутом 3 и диском 33 нижнего пневмопривода 11.
В боковом приливе 53 установлен пиропатрон 54 газового двигателя, рабочая камера которого отверстием 55 сообщена с соосной шпангоуту 3 полостью 56 силового цилиндра газового двигателя, выполненной со стороны основания корпуса 14.
С торцев корпуса 14 выполнены боковые каналы 57, в которых установлены воздухозаборники 58 с герметизирующими кольцевыми манжетами.
Боковые каналы 57 сообщены с полостью 56 отверстиями 59, над которыми в полости 56 установлен герметизированный кольцевой манжетой поршень 60. Рабочая камера 61 в силовом цилиндре газового двигателя образована в объеме между стенками корпуса 14 и верхней поверхностью поршня 60, который жестко связан винтом 62 со штоком 63, проходящим через шпангоут 3, отверстия валов 4 и отверстие крестовины 15, в котором шток 63 закреплен срезным штифтом 64. Второй конец штока 63 жестко связан с фиксатором рулей в сложенном положении 17.
Фиксатор рулей в сложенном положении 17 выполнен в виде цилиндрической трубки, по наружной поверхности которой равномерно по числу рулей выполнены сквозные продольные пазы для размещения задних кромок рулей 8.
Воздухозаборники 58 выполнены в виде полого цилиндра с торцевыми стенками, воздухозаборным пазом 65 и обнижением в виде цилиндрической проточки 66 между герметизирующими кольцевыми манжетами, по месту которой выполнены сквозные радиальные отверстия 67, и заглушкой 68. Величину перемещения воздухозаборников 58 и их положение в раскрытом состоянии определяют планки 69.
Для поступления воздушного потока из раскрытых воздухозаборников 58 в пневмоприводы в корпусе 14 выполнены отверстия 70, сообщающие внутренние полости раскрытых воздухозаборников 58 через отверстия 67 и проточки 66 с каналами 71, выполненными в диске 33 нижнего пневмопривода 11, и далее - через каналы 34 с входными каналами 42 ПРУ.
Функционирование отсека управления УС начинается со срабатывания механизма инициирования рулевого привода управляемого снаряды.
По сигналу системы управления УС срабатывает пиропатрон 54 (см. фиг. 6 и 7) и образовавшийся газ из камеры пиропатрона 54 через отверстие 55 поступает в рабочую камеру 61 силового цилиндра газового двигателя. Под действием силы давления газа на поршень 60 жестко связанный с ним шток 63 срезает штифт 64, и жестко связанные поршень 60, шток 63 и фиксатор рулей в сложенном положении 17 перемещаются до упора фиксатора 17 в ограничители 16. При этом гайка 18 (см. фиг. 1) выходит из прорезей концевых кромок рулей 8, после чего под воздействием фиксатора 17 на бортовые кромки рулей 8 рули 8 выбивают щитки 20 и раскрываются через продольные пазы корпуса 1. В раскрытом положении рули 8 стопорятся подпружиненными фиксаторами 9 в центральных каналах цапф 5.
Вместе с тем, перемещение поршня 60 в полости 56 силового цилиндра обеспечивает сообщение рабочей камеры газового двигателя 61 через отверстия 59 с боковыми каналами 57 корпуса 14, что приводит к воздействию газа на воздухозаборники 58, герметизирующие боковые каналы 57. Под действием давления газа воздухозаборники 58 выбивают герметизирующие корпус 1 заглушки 21, выходят из корпуса 1, перемещаясь в боковых каналах 57 до упора в планки 69. При этом проточки 66 воздухозаборников 58 располагаются напротив отверстий 70 корпуса 14, сообщенных каналами 71, выполненными в диске 33 нижнего пневмопривода, и отверстиями в дисках 22 с входными каналами 42 ПРУ пневмоприводов.
Таким образом, поступающий в воздухозаборные пазы 65 воздух заполняет внутренние объемы воздухозаборников 58 и через их радиальные отверстия 67, проточки 66, отверстия 70 корпуса 14, каналы 71 и каналы 34 в дисках 22 поступает во входные каналы 42 корпусов 35 пневмосистем ПРУ. Далее по боковым каналам 40 ПРУ (см. фиг. 4 и 5) воздух поступает в пазы 38, заполняет внутренние объемы глухих полостей 51 клапанов рычага 50 и в зависимости от углового положения рычага 50 распределяется в пазы 39, сообщенные каналами 43 и 44, с рабочими полостями пневмодвигателя. При этом сброс воздуха из рабочих полостей пневмодвигателей осуществляется в отсек управления УС через не перекрытую клапанами площадь пазов 39. Таким образом, перепад давлений воздуха в рабочих полостях каждого пневмодвигателя зависит от углового положения рычага 50, закрепленного на оси 48 якоря 49 УЭМ. При этом угловое положение якоря 49, т.е. его поворот до упора в магнитопровод 46, определяет присутствие управляющего сигнала на одной из обмоток 47 УЭМ.
Возникновение перепада давлений воздуха в рабочих полостях пневмодвигателя 10 (см. фиг. 3 и 1) вызывает перемещение поршня 25, которое по кинематической цепи «поршень 25 - шток 24 - рычаг 30 - тяга 13 - боковой рычаг 6 - цапфа 5» определяет угловое отклонение рулей 8. В пневмодвигателе 11 процесс углового отклонения рулей 8 происходит аналогично.
Датчики обратной связи 32 выполнены на основе фото диодной и светодиодной линеек и размещенной между ними шторки 31, которая перемещается вместе со штоком 24. Поэтому каждому угловому положению рулей 8 соответствует определенный сигнал датчика обратной связи 32.
Наличие датчика обратной связи 32 позволяет организовать замкнутый контур управления пневмприводом с отрицательной обратной связью, работающий в автоколебательном режиме. В аппаратуре управления 19 блока рулевого привода сигналы, поступающие из системы управления УС, суммируются с сигналами датчиков обратной связи 32. Тем самым в каждом контуре управления пневмоприводом формируется сигнал «ошибки», поступающий на усилители мощности аппаратуры управления 19, выходы которых соединены с обмотками 47 УЭМ 36. Когда сигнал датчика обратной связи 32 равен сигналу системы управления УС, т.е. сигнал «ошибки» равен нулю, рули 8 занимают угловое положение, заданное системой управления УС. При этом аппаратура управления 19 формирует электрические сигналы на обмотки 47 УЭМ 36, обеспечивающие реализацию такого осредненного углового положения колеблющегося с частотой автоколебаний между магнитопроводами 46 якоря 49 и жестко связанного с ним рычага 50, при котором перепад давлений воздуха в рабочих полостях пневмодвигателя, а значит и развиваемый пневмоприводом момент достаточны для удержания рулей 8 в заданном положении.
В конструкциях заявляемых устройств используются материалы и электронные компоненты отечественного производства.
Таким образом, предполагаемая группа изобретений в своей совокупности обеспечивает достижение поставленной цели - увеличение дальности полета УС за счет его оснащения воздушно-динамическим рулевым приводом, который функционирует пока движется УС. Кроме того, минимизация габаритов и массы блока рулевого привода за счет размещения двух идентичных пневмоприводов выходными штоками навстречу друг другу, а также конструктивное объединение в механизме инициирования рулевого привода управляемого снаряды механизмов раскрытия аэродинамических рулей и раскрытия воздухозаборников рулевого привода, обеспечивают снижение массы и уменьшение габаритов отсека управления УС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство инициирования воздушно-динамического рулевого привода управляемой авиабомбы, способ проверки готовности воздушно-динамического рулевого привода перед сбросом управляемой авиабомбы, воздушно-динамический рулевой привод и аппаратура управления воздушно-динамическим рулевым приводом авиабомбы | 2020 |
|
RU2748828C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2001 |
|
RU2196295C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166727C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ И УПРАВЛЯЕМЫЙ СНАРЯД | 2004 |
|
RU2275584C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ И РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2013 |
|
RU2533865C2 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ УПРАВЛЯЕМОГО СНАРЯДА | 2007 |
|
RU2356005C2 |
| Блок рулевого привода управляемого снаряда | 2024 |
|
RU2825869C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2003 |
|
RU2244897C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2005 |
|
RU2289782C1 |
Группа изобретений относится к области высокоточного оружия - управляемых снарядов. Технический результат - увеличение дальности полета управляемых снарядов. Управляемый снаряд содержит корпус. В корпусе закреплен блок рулевого привода и шпангоут с радиальными отверстиями. В этих отверстиях установлены валы, соединяющие цапфы. Цапфы выполнены с боковыми рычагами, кинематически связанными тягами с выходными рычагами блока рулевого привода. В торцевых пазах цапф шарнирно установлены аэродинамические рули. При этом блок рулевого привода выполнен воздушно-динамическим и соединен со шпангоутом шпильками, установленными вдоль оси управляемого снаряда и закрепленными на внутренних уступах поверхности корпуса. Тяги, соединяющие выходные рычаги блока рулевого привода с рычагами цапф, выполнены с возможностью их регулирования и размещены в секторе между соседними цапфами. Между блоком рулевого привода и шпангоутом размещен механизм инициирования воздушно-динамического привода. В нем между аэродинамическими рулями с возможностью осевого перемещения размещены цилиндрические воздухозаборники. Напротив воздухозаборников в корпусе выполнены отверстия, герметизированные заглушками. С противоположной стороны шпангоута закреплена аппаратура управления рулевым приводом. 4 н. и 14 з.п. ф-лы, 7 ил.
1. Управляемый снаряд, содержащий корпус, закрепленный в корпусе блок рулевого привода и шпангоут с радиальными отверстиями, в которых установлены валы, соединяющие цапфы, выполненные с боковыми рычагами, кинематически связанными тягами с выходными рычагами блока рулевого привода, и шарнирно установленные в торцевых пазах цапф аэродинамические рули, отличающийся тем, что блок рулевого привода выполнен воздушно-динамическим и соединен со шпангоутом шпильками, установленными вдоль оси управляемого снаряда и закрепленными на внутренних уступах поверхности корпуса, тяги, соединяющие выходные рычаги блока рулевого привода с рычагами цапф, выполнены с возможностью их регулирования и размещены в секторе между соседними цапфами, между блоком рулевого привода и шпангоутом размещен механизм инициирования воздушно-динамического привода, в котором между аэродинамическими рулями с возможностью осевого перемещения размещены цилиндрические воздухозаборники, напротив которых в корпусе выполнены отверстия, герметизированные заглушками, при этом с противоположной стороны шпангоута закреплена аппаратура управления рулевым приводом.
2. Управляемый снаряд по п. 1, отличающийся тем, что оси воздухозаборников расположены перпендикулярно продольной оси снаряда.
3. Управляемый снаряд по п. 1, отличающийся тем, что воздухозаборники размещены симметрично между аэродинамическими рулями.
4. Блок рулевого привода управляемого снаряда, содержащий электромагнитные пневмораспределительные устройства, сообщенные с поршневыми рулевыми машинами, отличающийся тем, что на каждой рулевой машине закреплены пневмораспределительное устройство, датчик обратной связи и узел центровки штока поршня рулевой машины, выполненный с опорой для оси рычага, на одном конце которого выполнена сфера, установленная в отверстии штока, а другой конец - кинематически связан с осью аэродинамических рулей, при этом сообщение пневмораспределительного устройства с рулевой машиной осуществляется посредством каналов пневмосистемы.
5. Блок рулевого привода по п. 4, отличающийся тем, что каждая рулевая машина выполнена в виде пневмодвигателя, состоящего из двух жестко связанных дисков, между которыми закреплена мембрана с поршнем в виде жесткого центра со штоком, а внутри дисков относительно линии разъема образованы круговые рабочие полости.
6. Блок рулевого привода по любому из пп. 4, 5, отличающийся тем, что в нем пневмодвигатели установлены соосно штоками навстречу друг другу с обеспечением параллельности штоков и соосности отверстий каналов пневмосистемы.
7. Блок рулевого привода по любому из пп. 4, 5, отличающийся тем, что датчик обратной связи выполнен в виде фотодиодной и светодиодной линеек и размещенной между ними шторки, закрепленной на штоке поршня пневмодвигателя.
8. Блок рулевого привода по любому из пп. 4-7, отличающийся тем, что в нем пневмодвигатели установлены на ограничительных втулках и скреплены между собой шпильками.
9. Блок рулевого привода по любому из пп. 4-8, отличающийся тем, что на одном из пневмодвигателей со стороны, противоположной выходному отверстию штока, выполнены установочные бобышки.
10. Блок рулевого привода по любому из пп. 4, 5, отличающийся тем, что диски пневмодвигателей выполнены равными по диаметру внутреннему диаметру корпуса снаряда.
11. Блок рулевого привода по любому из пп. 4, 5, отличающийся тем, что по внешнему периметру дисков выполнены отверстия каналов пневмосистемы и отверстия крепления пневмопривода.
12. Пневмораспределительное устройство блока рулевого привода управляемого снаряда, содержащее корпус, управляющий электромагнит с поворотным якорем, закрепленный на оси якоря рычаг с расположенными по обе стороны от оси клапанами, каналы пневмосистемы, отличающееся тем, что каналы пневмосистемы выполнены в корпусе, закрепленном с управляющим электромагнитом на общем основании, при этом в корпусе напротив клапанов выполнены регулируемые воздуховоды, сообщающиеся с входным и выходными каналами пневмосистемы, а в клапанах выполнены глухие полости, ориентированные открытой стороной к регулируемым воздуховодам.
13. Пневмораспределительное устройство блока рулевого привода управляемого снаряда по п. 12, отличающееся тем, что корпус пневмораспределительного устройства выполнен в виде усеченного сегмента с наружным диаметром, равным внутреннему диаметру корпуса снаряда, а регулируемые воздуховоды выполнены в виде двух симметричных относительно оси корпуса пар пазов, входной канал выполнен на оси симметрии корпуса параллельно оси сегмента и сообщен с верхними пазами цилиндрическими боковыми каналами, а выходные каналы выполнены сообщающимися с нижними пазами.
14. Пневмораспределительное устройство блока рулевого привода по любому из пп. 12, 13, отличающееся тем, что на оси якоря установлена пружина с регулируемым предварительным поджатием.
15. Механизм инициирования рулевого привода управляемого снаряда, содержащий механизм раскрытия и фиксации аэродинамических рулей с поршневым газовым двигателем, пиропатроном и подпружиненными фиксаторами, размещенными в осевых каналах цапф, отличающийся тем, что в механизм инициирования рулевого привода управляемого снаряда введен механизм раскрытия воздухозаборников, механизм раскрытия и фиксации рулей и механизм раскрытия воздухозаборников размещены в закрепленном в верхней части шпангоута управляемого снаряда в прямоугольном корпусе, в котором вдоль продольной оси управляемого снаряда выполнены рабочая камера пиропатрона и сообщенный с ней отверстием силовой цилиндр газового двигателя, поршень которого соединен штоком с фиксатором аэродинамических рулей в сложенном положении, выполненным в виде трубки с продольными пазами для размещения задних кромок рулей и закрепленной на противоположном конце гайкой, контактирующей с прорезями на концевых кромках рулей, а перпендикулярно продольной оси снаряда - сообщенные с силовым цилиндром отверстиями в его стенках каналы, в которых установлены цилиндрические воздухозаборники.
16 Механизм инициирования воздушно-динамического рулевого привода по п. 15, отличающийся тем, что к нижней плоскости шпангоута соосно с ним закреплена крестовина с цилиндрической направляющей, ограничителем перемещения фиксатора рулей в сложенном положении и центральным отверстием для штока, закрепленного разрывным штифтом в основании крестовины.
17. Механизм инициирования рулевого привода управляемого снаряда по любому из пп. 15, 16, отличающийся тем, что в валах по оси управляемого снаряда выполнены отверстия, через которые пропущен шток, соединяющий поршень газового двигателя с фиксатором рулей.
18. Механизм инициирования рулевого привода управляемого снаряда по п. 15, отличающийся тем, что каждый воздухозаборник выполнен в виде полого цилиндра с торцевыми стенками, на наружной цилиндрической поверхности которого со стороны газового двигателя выполнены обнижение и радиальные отверстия, а с другой - выведенный в полость воздухозаборника радиальный паз.
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2013 |
|
RU2537357C1 |
| УПРАВЛЯЕМАЯ РАКЕТА | 2004 |
|
RU2258898C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2007 |
|
RU2354922C1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2370727C1 |
| US 20120175459 A1, 12.07.2012. | |||

