Изобретение относится к оптико-электронным системам технического зрения и может быть использовано в датчиках положения подвижного объекта относительно неподвижного, например, для определения положения подрессоренного кузова железнодорожного вагона относительно оси колесной пары.
Известно устройство для определения положения колесной пары в рельсовой колее, содержащее жесткую раму для крепления к буксам колесной пары, смонтированные на раме датчики ее поперечных перемещений, одни из которых установлены с возможностью размещения над головкой одного рельса, а вторые - над головкой другого рельса, и датчик смещения оси колесной пары относительно букс, выход которого связан с каналом определения поперечных перемещений колесной пары, выходы первых датчиков поперечных перемещений связаны с каналом, с каналом определения углового перемещения колесной пары в горизонтальной плоскости и с каналом определения измерения расстояния между головками рельсов, выходы вторых датчиков поперечных перемещений связаны с последним из каналов, выходы которых связаны с блоком регистрации; для повышения точности оно снабжено датчиками вертикальных перемещений относительно рельсов датчиков поперечных перемещений, каналами определения вертикальных перемещений каждого из колес колесной пары и определения углового перемещения колесной пары в вертикальной поперечной плоскости, причем выходы каналов связаны с блоком регистрации, выходы одних датчиков вертикальных перемещений связаны с корректирующими входами каналов определения поперечных перемещений колесной пары, определения углового перемещения колесной пары в горизонтальной плоскости и определения изменения расстояния между головками рельсов, а также с каналом определения вертикальных перемещений одного колеса колесной пары и с каналом определения углового перемещения колесной пары в вертикальной поперечной плоскости, выходы вторых датчиков вертикальных перемещений связаны с корректирующим входом канала определения изменения расстояния между головками рельсов, с каналом определения вертикальных перемещений второго колеса колесной пары, с каналом определения угловых перемещений колесной пары в вертикальной поперечной плоскости [авторское свидетельство №1643279, B 61 L 25/02, опубл. 23.04.91].
Приведенное устройство не определяет положения кузова вагона относительно оси колесной пары, в нем используется косвенный метод измерения, т.е. измеряются не только перемещение колеса в рельсовой колее, но и другие величины, в частности, перемещения самих датчиков. Кроме того, в таких устройствах обычно используются электромеханические датчики, обладающие низкой надежностью при работе в условиях сильной тряски.
Более близким к предлагаемому техническому решению является устройство, позволяющее обрабатывать пространственные и угловые координаты изображений наблюдаемых объектов, представляющее из себя стереоскопическую систему с двумя разнесенными в пространстве координатными датчиками, каждый их которых представляет телекамеру с объективом и матричным фотоприемником типа прибора с зарядовой связью (ПЗС) [Системы технического зрения, ред. А.Н.Писаревский, А.Ф.Чернявский, Л.: Машиностроение, 1988, с.110-111].
Основной недостаток такой системы на сегодняшний день является более низкая разрешающая способность телекамер по сравнению с телекамерами с линейным фотоприемником типа ПЗС. Разрешающая способность ниже в 2-3 раза. Кроме того, необходимость производить последовательный “опрос” всех ячеек матрицы приводит к большим временным затратам в телекамерах с матричным фотоприемником по сравнению с телекамерами с линейным фотоприемником. Например, при одинаковом шаге светочувствительных ячеек в матрице и линейке и числе ячеек в линейке, равном числу столбцов /строк/ в матрице, время обработки одного кадра матрицы будет больше в число раз, равное числу строк /столбцов/ матрицы, что может составить сотни раз.
В качестве прототипа изобретения выбран оптико-электронный преобразователь для бесконтактного измерения линейного перемещения, содержащий оптически связанные источник излучения, выполненный в виде лампы накаливания или светодиода, или лазера, и многоэлементный линейный фотоприемник. Преобразователь снабжен установленными по ходу излучения сужающимися фокусирующим клином и коллиматором [патент РФ №2156434, G 01 B 11/02, опубл. 20.09.2000 г.].
Этот преобразователь имеет недостаточную точность применительно к определению положения оси колесной пары транспортного средства относительно его подрессоренного кузова, связанную с использованием только одной линейки фотоприемника, и ограниченные функциональные возможности, связанные с тем, что это устройство измеряет только дистанцию между объектами и не измеряет углового положения между ними, что очень важно для подрессоренного кузова при размещении в нем других датчиков.
Изобретение решает задачу повышения точности измерения линейного перемещения двух объектов относительно друг друга и обеспечения измерения углового положения между ними с высокой точностью.
Сущность изобретения заключается в оптико-электронном преобразователе для бесконтактного измерения перемещений объектов относительно друг друга, содержащем источник излучения в виде светодиода, установленный на одном из объектов, и многоэлементный линейный фотоприемник, установленный на другом объекте, в котором фотоприемник выполнен в виде не менее чем из двух пар разнесенных в пространстве многоэлементных линейных фотоприемников, выполненных в виде приборов с зарядовой связью, светочувствительные линейки которых в каждой паре установлены под углом α 1, где 0° <α 1<90° , а между светодиодом и каждой парой линейных фотоприемников установлены объектив и устройство формирования изображения световой марки от светодиода в виде креста в плоскости каждой пары линейных фотоприемников, выполненное в виде не менее чем из двух цилиндрических линзовых растров, не экранирующих друг друга, угол между плоскостями симметрии которых α 2 имеет те же пределы, что и угол α 1.
В частных случаях выполнения каждое устройство формирования изображения световой марки в виде креста может быть установлено с возможностью перемещения вдоль оптической оси объектива и вращения вокруг этой оси, каждый из цилиндрических линзовых растров может быть установлен с возможностью разворота в двух взаимно перпендикулярных направлениях, одно из которых перпендикулярно плоскости симметрии цилиндрического линзового растра. Кроме того, целесообразно, чтобы каждая из пар многоэлементных линейных фотоприемников была дополнена другой парой многоэлементных линейных фотоприемников, выполненных в виде приборов с зарядовой связью, так что светочувствительные линейки двух приборов с зарядовой связью, относящихся к разным парам, параллельны друг другу, а плоскости симметрии цилиндрических линзовых растров составляют со светочувствительными линейками пар фотоприемников угол α 3 с одной парой и угол α 3+α 2 с другой дополнительной парой, при этом α 2>>α 3.
При осуществлении изобретения может быть получен следующий технический результат.
Устройство, выполненное согласно изобретению, образует стереотелевизионную систему, определяющую три координаты изображения световой марки, т.е. полное пространственное положение изображения световой марки в пространстве изображений объективов телекамер, которое имеет взаимно однозначную связь с пространством предметов через законы геометрической оптики. Таким образом, реализуется измерение как линейного перемещения объектов, так и углового положения между ними. Устройство позволяет реализовать эффект использования матричного фотоприемника с числом строк, равном числу светочувствительных элементов в одном линейном ПЗС, и числом столбцов, равном числу светочувствительных элементов в другом линейном ПЗС, чем и обеспечивается как высокая точность измерения, так и скорость определения координат. Использование большого числа линейных ПЗС позволяет формировать эквиваленты матричных ПЗС с еще большим числом строк и столбцов, чем будет обеспечиваться еще более высокая точность измерений.
Изобретение поясняется чертежами, где в качестве примера возможности осуществления изобретения проиллюстрировано применение предлагаемого оптико-электронного преобразователя для определения положения оси колесной пары транспортного средства относительно подрессоренного кузова этого средства.
На Фиг.1 приведена схема расположения основных элементов преобразователя на кузове и колесной паре транспортного средства (вид сбоку и вид спереди).
На Фиг.2 приведены принципиальная схема реализованной изобретением стереотелевизионной системы, где основные элементы определены через декартовы системы координат, связанные с ними.
На Фиг.3 приведен поясняющий чертеж к Фиг.2.
На Фиг.4 приведен вид поля изображения объектива телекамеры.
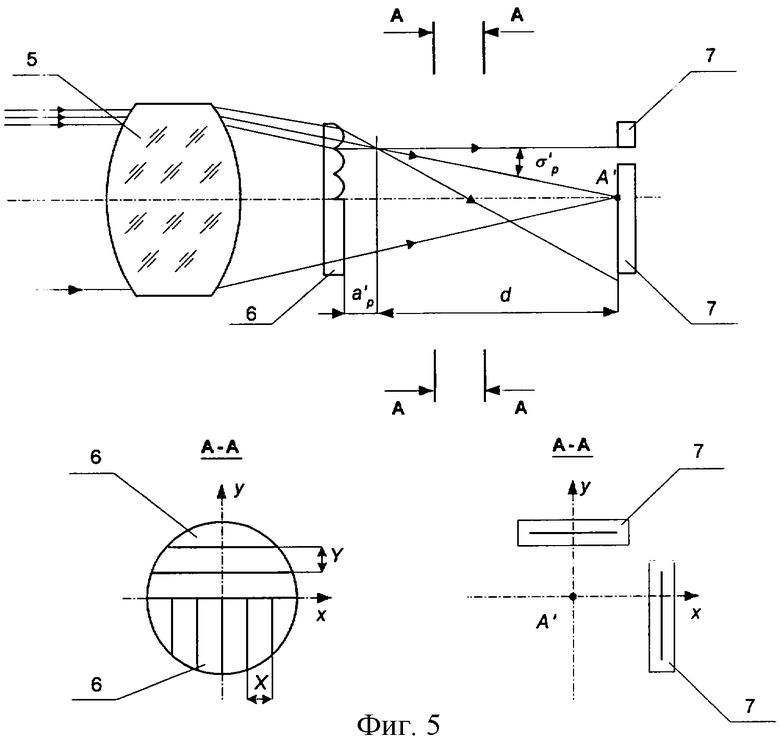
На Фиг.5 приведен вариант реализации принципиальной оптической схемы телекамеры. На сечении А-А изображен вид устройства формирования изображения световой марки в виде креста в плоскости, перпендикулярной оптической оси телекамеры. На сечении Б-Б изображен вид фотоприемника в плоскости, перпендикулярной оптической оси телекамеры.
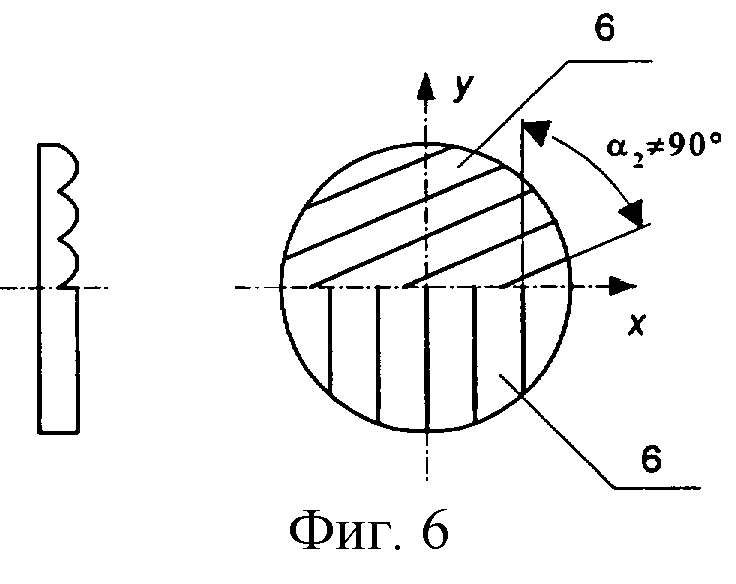
На Фиг.6 приведен вариант реализации устройства формирования изображения световой марки в виде креста (α 2≠90°).
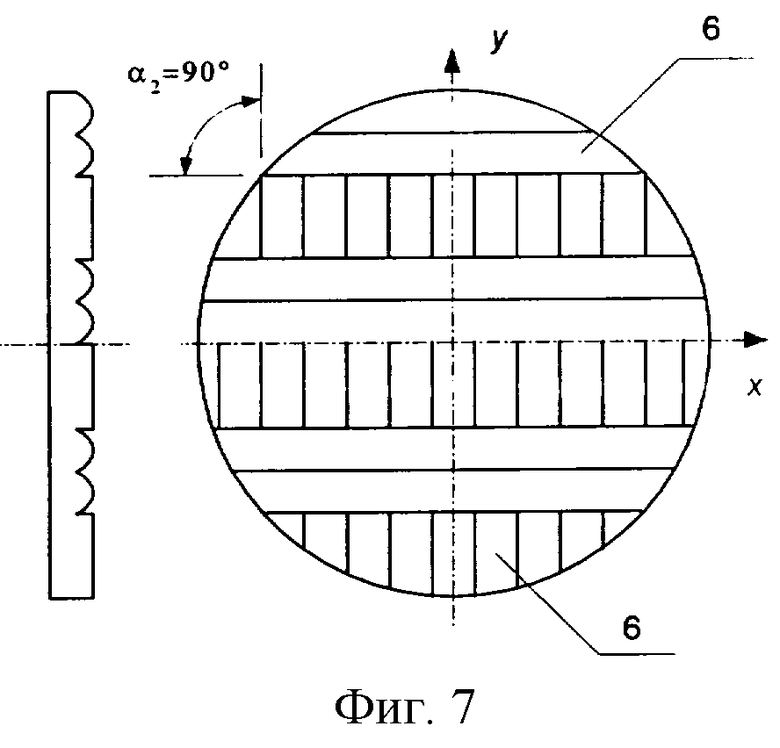
На Фиг.7 приведен вариант реализации устройства формирования изображения световой марки в виде креста (α 2=90° ).
На Фиг.8 приведен вид поля изображения объектива телекамеры при выполнении фотоприемника из двух пар линейных ПЗС, дополненных другой парой ПЗС.
На кузове 1 транспортного средства, в частности железнодорожного вагона (Фиг.1), установлено две пары разнесенных в пространстве кузова телекамер 2, а на буксах колесной пары 3 этого средства установлено два светодиода 4 источника излучения, по одному с каждой стороны. Каждая телекамера (Фиг.5) содержит многоэлементный фотоприемник 7, выполненный в виде ПЗС, объектив 5 и устройство формирования изображения световой марки от светодиода, выполненное в виде двух цилиндрических линзовых растров 6.
Устройство работает следующим образом.
Световые марки от светодиодов 4 излучают световой пучок, попадающий на многоэлементные фотоприемники телекамер 2 при любом положении кузова 1 относительно колесной пары 3 (Фиг.1). Телекамеры вырабатывают координаты центра крестов световых марок от обоих светодиодов 4, определяющих положение оси колесной пары 3 относительно кузова 1, который задается, например, прямой, соединяющей середины оснований измерительного треугольника (Фиг.2). Расстояние между серединами измерительных треугольников для обоих бортов транспортного средства есть конструктивный заведомо известный параметр, что сводит задачу определения положения к задаче аналитической геометрии в пространстве. Прямые O1O1 и O2O2' совпадают с оптическими осями объективов 5 телекамер, сами объективы представлены плоскостями координат X1 O1 Y1 и X2 О2 Y2, центры которых точки O1 и О2 совпадают с узловыми точками объективов. Координатные плоскости X1' O1' Y1' и Х2' О2' Y2' определяют плоскости изображений объективов. Расстояние между точками O1 и O2 определяет основание измерительного треугольника O1 А О2, в вершине которого - точке А, расположен светодиод 4. В точках A1' и А2' располагаются изображения центра крестообразных световых марок от светодиодов 4 в каждой из телекамер. Расстояние от узловых точек O1 и О2 до плоскости изображений определяется задним отрезком объективов s'o.
Работа образованной элементами предложенного преобразователя стереотелевизионной системы может быть представлена следующим образом. В каждой из телекамер определяются координаты X1', Y1' и X2', Y2′точек A1' и А2'. Значения углов β 1 и β 2 при основании измерительного треугольника O1 А О2 определяется по известным формулам аналитической геометрии.

Далее определение положения точки А относительно любой точки основания O1O2 является тривиальной математической задачей.
На Фиг.3 приведен укрупненно фрагмент Фиг.2 с указанием всех углов α , β , и γ , определяющих положение прямой O1A и в пространстве.
Углы α и γ по Фиг.3 могут быть определены по известным координатам точки А’ по формулам:

В поле изображения объектива телекамеры по Фиг.4 установлены два линейных фотоприемника 7, угол между светочувствительными линейками которых α 1=90°, линии а-а определяют указанные линейки. В точке А’ находится текущее изображение центра световой марки. Линии б-б составляют друг с другом угол α 2=90° и определяют собой крестообразное изображение указанной марки. При перемещениях кузова относительно оси колесной пары текущее положение точки А меняется и при этом изменяется текущее значение координат х’ и у’. Точка А’ определяет центр крестообразного изображения марки 4 и всегда совпадает с истинным (некрестообразным изображением) изображением марки. Аналогичный вид поля зрения имеет место во всех четырех телекамерах, но координаты точки А’ везде будут разными.
В устройстве по Фиг.5, представляющем принципиальную оптическую схему телекамеры, последовательно по ходу лучей, указанному стрелками, установлены объектив 5, устройство формирования изображения световой марки в виде креста, состоящее их двух цилиндрических линзовых растров 6 и линейных фотоприемников 7, выполненных в виде линейных ПЗС. Если бы светодиод (на Фиг.5 не показан) лежал на оптической оси объектива 5, то при отсутствии в ходе лучей элементов растра 6 его изображение находилось в центре поля изображения, где расположена пара линейных ПЗС. При наличии в ходе лучей элементов растра 6 изображение точки А преобразуется в крест, центр которого совпадает с точкой А’, а длина “усов” креста определяется по формулам для двух направлений:

где σ ’р - задний апертурный угол линзового элемента цилиндрического растра 6, а α ’p - задний отрезок указанного линзового элемента, Dx, Dy - размеры линзового элемента растра по двум направлениям, которые обычно одинаковы. Из формулы видно, что при смещении элементов растра 6 вдоль оптической оси будет меняться длина усов l, а при их развороте вокруг оси крестообразное изображение будет разворачиваться вокруг точки А’ при любом ее положении в поле изображения. Устройство формирования крестообразного изображения световой марки иллюстрируется двумя вариантами его реализации (Фиг.6, Фиг.7), отличающимися как значением угла α 2, так и количеством элементов растра 6. Конструктивное разнообразие определяется разнообразием решаемых задач и конкретных условий при их решении. Устройство по Фиг.8 включает в себя две пары линейных фотоприемников 7, расположенных по обе стороны от центра поля изображения и не обязательно симметрично. Расстояние между светочувствительными линейками (линии а-а равно Б, а угол между ними α 1=90° , что так же не обязательно. В точке А’ находится центр крестообразного изображения световой марки. “Усы” креста б-б и линейки а-а составляют друг с другом угол α 3, для случая, определяемого зависимостью

Здесь реализуется эффект электронного нониуса, обеспечивающий повышение точности определения координат точки А’ [Г.В.Денисюк и др., Использование матричных ПЗС для автоматизации процесса фокусировки. - ОМП, 1989, №3, с.48-51].
Введение перемещения вдоль оптической оси объектива и вращения вокруг нее устройства формирования позволяет изменять как длину “усов” крестообразного изображения световой марки [С.Н.Натаровский. Работа линзового растра в сходящемся и расходящемся световом пучке. Известия высших учебных заведений. Приборостроение, Том XXV, №7, Ленинградский институт точной механики и оптики, 1982 г. с.94-96], так и их ориентацию относительно фотоприемника. Последнее обеспечивает как более легкую регулировку устройства в целом, так и, что более важно, обеспечивает возможность реализации в устройстве нониального эффекта и тем самым обеспечить еще более высокую точность измерений.
Введение возможности разворота плоскосимметричного оптического элемента - цилиндрического линзового растра позволяет расширить функциональные возможности устройства. Разворот элемента вокруг направления (оси) параллельной плоскости симметрии элемента нарушает симметрию формируемого крестообразного изображения световой марки, что целесообразно в случае расположения фотоприемников - линейных ПЗС по одну сторону от центра поля изображения объектива телекамеры, а разворот в перпендикулярном направлении приведет к искривлению “усов” креста. Выполнение фотоприемника в виде двух пар линейных ПЗС с параллельными друг другу линейками в разных парах, расположенных по разную сторону от центра поля изображения и составляющих с линейками второй пары указанный угол α 1, и введение конечного угла α 3 между плоскостями указанных плоскосимметричных оптических элементов и линейками одной из пар приводит к реализации в полной мере нониального эффекта, обеспечивающего получения точности измерения в абсолютной мере меньшей шага линеек ПЗС. Установка двух выше проиллюстрированных и описанных стереотелевизионных систем, выполненных согласно изобретению, по обеим сторонам кузова транспортного средства над буксой соответствующего колеса позволяет определить в любой момент времени координаты точек букс, где устанавливаются светодиоды относительно, например, середин оснований указанных выше измерительных треугольников и тем самым определить положение кузова относительно оси колесной пары.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
| УСТРОЙСТВО КОМПЬЮТЕРНОЙ СИСТЕМЫ ДЛЯ ТЕЛЕВИЗИОННОГО КРУГОВОГО СКАНИРОВАНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ СВАРНЫХ ШВОВ ТРУБОПРОВОДА ИЗ ТРУБ БОЛЬШОГО ДИАМЕТРА | 2019 |
|
RU2709408C1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУГОВЫХ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2057287C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405135C1 |
| Фотоэлектрическое автоколлимационное устройство | 1990 |
|
SU1737264A1 |
| Оптическое фотоэлектрическое устройство | 1990 |
|
SU1753444A1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |




Оптико-электронный преобразователь для бесконтактного измерения перемещений объектов относительно друг друга содержит источник излучения в виде светодиода, установленный на одном из объектов, и многоэлементный линейный фотоприемник, установленный на другом объекте. Фотоприемник выполнен в виде двух пар разнесенных в пространстве многоэлементных линейных фотоприемников, выполненных в виде ПЗС, светочувствительные линейки которых в каждой паре установлены под углом α1 относительно другой пары, а между светодиодом и каждой парой линейных фотоприемников установлены объектив и устройство формирования изображения световой марки от светодиода в виде креста в плоскости каждой пары линейных фотоприемников, выполненное в виде не менее чем из двух цилиндрических линзовых растров, не экранирующих друг друга, угол между плоскостями симметрии которых α2. Технический результат - повышение точности измерений линейного перемещения двух объектов относительно друг друга и измерения углового положения между ними с высокой точностью. 3 з.п. ф-лы, 8 ил.

| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ И (ИЛИ) ДИАМЕТРА | 1998 |
|
RU2156434C2 |
| ОПТОЭЛЕКТРОННАЯ СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ В ДВИЖЕНИИ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ЖЕЛЕЗНОДОРОЖНОЙ КОЛЕИ. ОПТОЭЛЕКТРОННЫЙ ДАТЧИК БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ И ИЗНОСА РЕЛЬСА | 1995 |
|
RU2142892C1 |
| Оптическое фотоэлектрическое устройство | 1990 |
|
SU1753444A1 |
| US 5196900 A, 23.03.1993. | |||

