Изобретение относится к области радиоизмерений и предназначено для оценки нелинейных искажений, вносимых трактами обработки или усиления низкочастотных сигналов, например, звуковых.
Прототипом заявляемого устройства является устройство, содержащее генератор случайного сигнала, полосовой фильтр, фильтр нижних частот и вольтметр, вход которого соединен с выходом фильтра нижних частот, вход которого является тестовым входом устройства, тестовым выходом которого служит выход полосового фильтра, вход которого соединен с выходом генератора случайного сигнала [Сырицо А. Измерение нелинейных искажений на шумовом сигнале. - Радио, 1999 г, № 4, стр. 29-31].
Принцип действия измерителя-прототипа заключается в подаче на вход тестируемого узла (например, усилителя) случайного сигнала в ограниченной полосе частот, а затем измерении уровня сигнала на выходе усилителя вне полосы частот входного тестового сигнала. Поскольку результатом интермодуляционных искажений являются и составляющие с комбинационными частотами, выходящими за пределы полосы частот входного сигнала, то по отношению напряжения этих составляющих к напряжению входного сигнала судят об уровне интермодуляционных искажений. Причем в качестве интермодуляционных составляющих берется только часть сигнала, расположенная в низкочастотной области спектра выходного искаженного сигнала, выделенная фильтром нижних частот. При этом другие комбинационные составляющие, находящиеся как в полосе частот входного сигнала, так и выше нее, не учитываются. Безусловно, такой подход, отличаясь простотой аппаратурной реализации, не обеспечивает высокой точности измерений и не позволяет судить о реальном уровне вносимых искажений по всему диапазону рабочих частот тестируемого усилителя.
Технический результат, достигаемый при использовании настоящего изобретения, состоит в повышении точности оценки уровня шумовой интермодуляции, вызванной нелинейной характеристикой тестируемого узла.
Технический результат достигается тем, что в измеритель уровня шумовой интермодуляции, содержащий генератор случайного сигнала и полосовой фильтр, вход которого соединен с выходом генератора случайного сигнала, выход полосового фильтра является тестовым выходом измерителя, согласно изобретению введены коррелятор, блок сравнения и блок управления, вход которого является входом запуска измерителя, тестовым входом которого служит информационный вход коррелятора, выход которого соединен с информационным входом блока сравнения, выход которого является информационным выходом измерителя, адресный вход коррелятора и адресный вход блока сравнения объединены в единую адресную шину и подключены к адресному выходу блока управления, тактовый и обнуляющий выходы которого соединены с соответствующими входами коррелятора.
Блок сравнения может быть выполнен в виде устройства, вычисляющего среднее значение модуля разности сравниваемых величин, в виде устройства, вычисляющего среднеквадратичное значение разности сравниваемых величин, в виде устройства, вычисляющего среднее отношение сравниваемых величин.
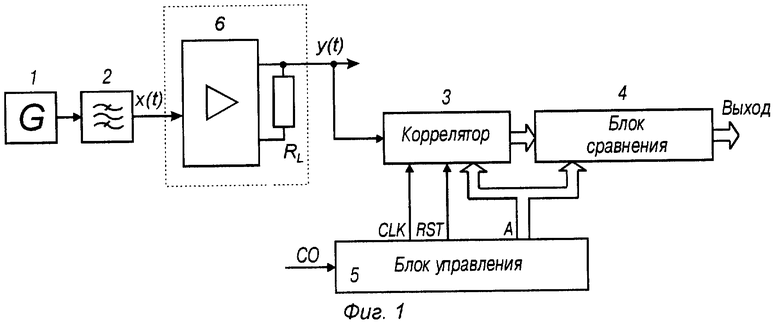
Сущность изобретения поясняется чертежами. На фиг.1 показана функциональная схема измерителя уровня шумовой интермодуляции с подключенным тестируемым усилителем. На фиг.2 приведена функциональная схема одного из вариантов реализации коррелятора. На фиг.3 приведена функциональная схема одного из вариантов реализации блока сравнения. На фиг.4 приведена функциональная схема одного из вариантов реализации блока управления.
Функциональная схема измерителя по фиг.1 содержит генератор 1 случайного сигнала, полосовой фильтр 2 (ПФ), коррелятор 3, блок 4 сравнения, блок 5 управления и тестируемый усилитель 6 с подключенной нагрузкой RL. Выход генератора 1 соединен со входом ПФ2, к выходу которого подключен вход тестируемого усилителя 6, выход которого соединен с информационным входом коррелятора 3, выход которого соединен с информационным входом блока 4 сравнения, выход которого является информационным выходом измерителя, адресный вход коррелятора 3 и адресный вход блока 4 сравнения объединены в единую адресную шину и подключены к адресному выходу А блока 5 управления, тактовый CLK и обнуляющий RST выходы которого соединены соответственно с тактовым и обнуляющим входами коррелятора 3, вход блока 5 управления служит входом СО запуска измерителя.
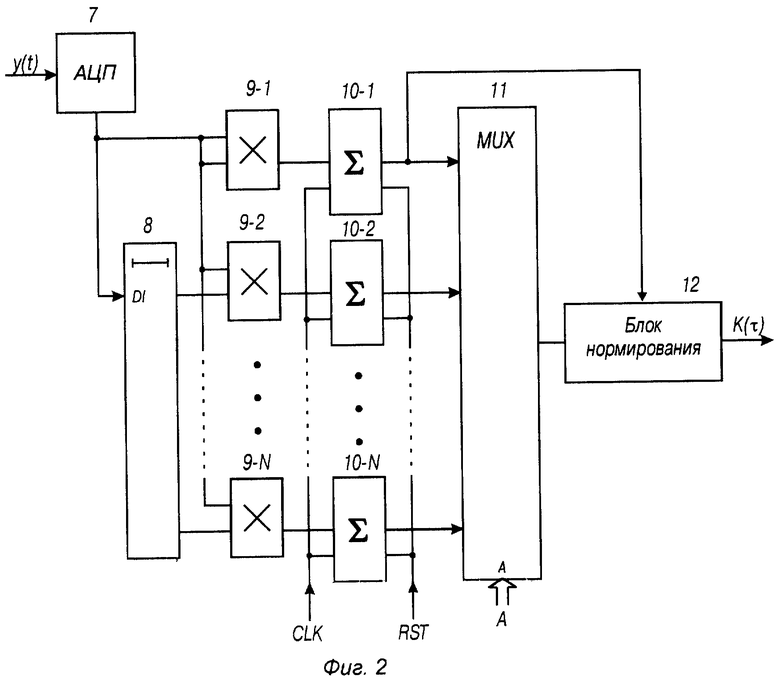
Функциональная схема коррелятора 3 (фиг.2) содержит аналого-цифровой преобразователь (АЦП) 7, линию 8 задержки, группу 9 умножителей, группу 10 накапливающих сумматоров, мультиплексор 11 и блок 12 нормирования, выход которого является выходом К(τ ) коррелятора 3, входом которого служит информационный вход АЦП 7, выход которого соединен со входом линии 8 задержки и объединенными первыми входами умножителей 9, выходы которых подключены к информационным входам соответствующих накапливающих сумматоров из группы 10, выходы которых подключены к соответствующим информационным входам мультиплексора 11, выход которого соединен с первым входом блока 12 нормирования, второй вход которого соединен с выходом накапливающего сумматора 10-1, тактовые входы сумматоров 10 объединены и составляют тактовый вход CLK коррелятора 3, обнуляющие входы сумматоров 10 также объединены и составляют обнуляющий вход RST коррелятора 3, второй вход умножителя 9-1 объединен с первым, а вторые входы умножителей 9-2÷ 9-N подключены к соответствующим выходам многоотводной линии 8 задержки, адресный вход мультиплексора 11 составляет адресную шину коррелятора 3. Блок 12 нормирования физически может быть выполнен в виде блока деления, при этом первый вход блока 12 является входом делимого, а второй вход - входом делителя.
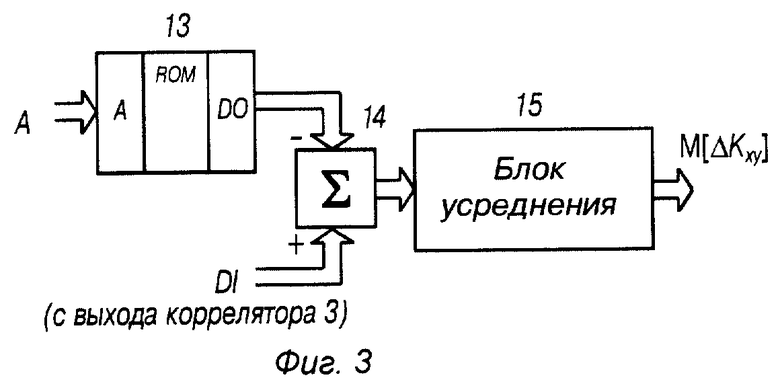
Блок 4 сравнения (фиг.3) содержит постоянное запоминающее устройство (ПЗУ) 13, блок 14 вычитания и блок 15 усреднения. Адресный вход ПЗУ 13 является адресным входом блока 4 сравнения, информационным входом DI которого служит первый вход блока 14 вычитания, второй вход которого соединен с выходом ПЗУ 13, выход блока 14 вычитания соединен со входом блока 15 усреднения, выход которого является выходом блока 4 сравнения.
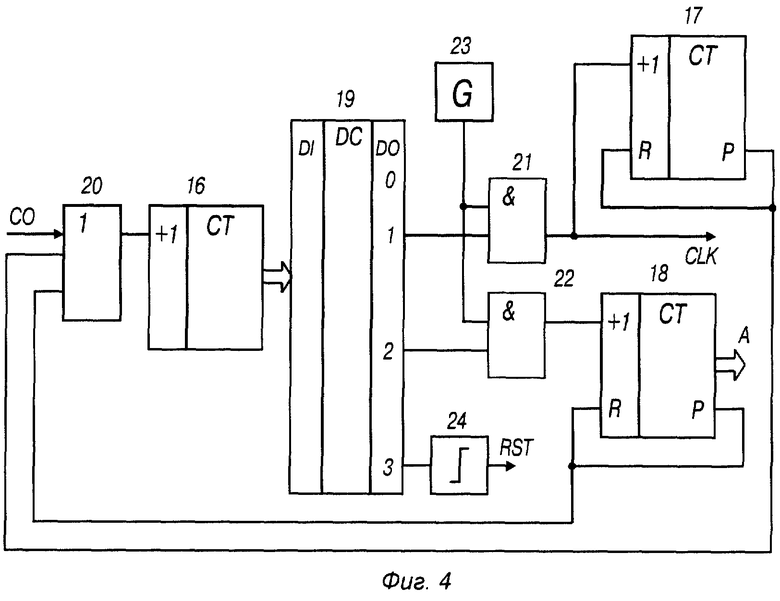
Блок 5 управления (фиг.4) содержит счетчики 16, 17, 18, дешифратор 19, элемент ИЛИ 20, элементы И 21, 22, генератор 23 тактовых импульсов и одновибратор 24. Разрядные выходы счетчика 16 соединены с соответствующими разрядными входами дешифратора 19, первый выход которого соединен с первым входом элемента И 21, выход которого является тактовым выходом CLK блока 5 и соединен со счетным входом счетчика 17, выход переноса которого соединен с первым входом элемента ИЛИ 20, второй вход которого соединен с выходом переноса счетчика 18, счетный вход которого соединен с выходом элемента И 22, первый вход которого соединен со вторым выходом дешифратора 19, третий выход которого соединен со входом одновибратора 24, выход которого является выходом RST блока 5 управления, входом СО которого служит третий вход элемента ИЛИ 20, вторые входы элементов И 21, 22 объединены и подключены к выходу генератора 23 тактовых импульсов, вход обнуления счетчика 17 соединен с его выходом переноса, вход обнуления счетчика 18 соединен с его выходом переноса, многоразрядный информационный выход счетчика 18 является адресным выходом A блока 5 управления.
В основе функционирования измерителя уровня шумовой интермодуляции (фиг.1) лежит алгоритм, состоящий в сравнении автокорреляционных функций входного и выходного сигналов. Учитывая, что нелинейное преобразование случайных сигналов меняет их статистические свойства, то задача оценки объема продуктов нелинейных искажений может быть сведена к оценке степени изменения автокорреляционной функции случайного сигнала, прошедшего нелинейные цепи. С позиций спектрального подхода это означает, что с расширением спектра выходного сигнала вследствие появления результатов интермодуляции изменяется и отвечающая этому спектру автокорреляционная функция, так как энергетический спектр и автокорреляционная функция жестко связаны преобразованием Фурье.
Используемый в качестве тестового стационарный случайный сигнал со сплошным спектром вырабатывается генератором 1 и на вход тестируемого усилителя 6 подается через ПФ 2 в узком диапазоне частот (в полосе, составляющей примерно 10-30% от полосы рабочих частот усилителя). Процесс измерений заключается в вычислении нормированной автокорреляционной функции Kyy(τ ) выходного сигнала y(t) усилителя 6 и сравнении ее с эталонной функцией Kxx(τ ). Если тестовый сигнал является стационарным случайным процессом, то его нормированная автокорреляционная функция Кхх(τ ) от времени не зависит и, следовательно, она может быть измерена в любое время - как в цикле измерений параметров усилителя 6, например, так и заранее. Разумеется, если это сделать заранее, то время, затрачиваемое на процесс измерений, сократится. По этой причине целесообразно иметь значения Кхх(τ ) в памяти измерителя, куда их можно занести на этапе сборки измерителя как значения эталонной функции.
По запускающему импульсу на входе СО (фиг.1) в корреляторе 3 начинается вычисление функции Куу(τ ), так как на информационный вход коррелятора поступает сигнал y(t) с выхода усилителя 6, а блок 5 управления в ответ на импульс СО выдает пакет тактовых импульсов, тактирующих коррелятор, количество которых определяет длительность интервала наблюдения Т. По истечении времени Т блок 5 прекращает подачу тактовых импульсов и начинает перебор адресов А на единой адресной шине А, обращаясь одновременно к ячейкам памяти коррелятора 3 и ячейкам памяти блока 4 сравнения. Извлекаемые последовательно измеренные Куу(τ i) и эталонные значения Кхх(τ i) для всех i сравниваются, и по результатам сравнения на выходе блока 4 появляется код, соответствующий числовому показателю уровня шумовой интермодуляции.
Сравнение функций Kyy(τ i) и Кхх(τ i) в примере, проиллюстрированном схемой по фиг.3, происходит путем вычисления среднего отклонения

где N - число вычисляемых ординат;
τ i - дискретно вводимая задержка.
При максимально возможном сходстве процессов x(t) и y(t) когда x(t)=ky(t) (k - постоянный коэффициент), величина М[Δ Кху] будет равна нулю. С увеличением степени отличия входного x(t) и выходного y(t) сигналов будет расти и среднее значение разности М[Δ Кху] их автокорреляционных функций. Таким образом при функционировании блока 4 сравнения согласно алгоритму (1) количественным показателем уровня шумовой интермодуляции следует считать величину M[Δ Kxy].
В качестве коррелятора 3 может быть использовано устройство параллельного типа (но не обязательно) (фиг.2), содержащее N каналов обработки (по числу вычисляемых ординат). Принцип действия подобных устройств общеизвестен и состоит в формировании N задержанных на время τ i=(i-1)Δ τ сигналов (Δ τ - дискрет задержки), затем перемножении сигнала y(tj) на сигнал y(tj-τ i) и вычислении N сумм вида
где tj=t0+jΔ t (j=1,2,... М);
t0 - начальный момент времени;
Δ t - период дискретизации сигнала y(t) в АЦП 7;
М - количество отсчетов в выборке за время Т.
Для получения ординат нормированной автокорреляционной функции сумму Si следует разделить на аналогичную величину при нулевой задержке (τ 1=0), то есть вычислить отношение
для различных значений τ i (для функции Кхх(τ i) необходимо выполнить те же операции с заменой y(t) на x(t)). Суммы вида (2), которые используются в (3), формируются на выходах накапливающих сумматоров 10-1-10-N. Для коммутации каждого значения Si на вход блока 12 нормирования служит мультиплексор 11, управляемый по единой адресной шине блоком 5. В процессе перебора адресов на выходе блока 12 последовательно появляются значения Kyy(τ i) для всех i. Поскольку в блоке 12 нормирование результатов происходит за счет деления сумм Si без их предварительного усреднения, то блок 12 может быть упрощен до уровня блока деления.
Назначение блока 4 сравнения (фиг.3) - это вычисление выражения (1), для чего необходимо выполнить две основные операции: получить модуль разности для различных τ i и усреднить полученные значения. Вычисление модуля разности |Kyyτ i)-Kxx(τ i)| происходит в блоке 14 вычитания. Операнды Кхх(τ i) как значения эталонной функции хранятся в ПЗУ 13 и извлекаются при последовательном переборе адресов на единой адресной шине А. Блок 15 усреднения может состоять из накапливающего сумматора и устройства деления на постоянную величину N, вход накапливающего сумматора при этом является входом блока усреднения, выходом которого служит выход устройства деления, вход которого соединен с выходом накапливающего сумматора.
Для управления работой вышеописанных узлов служит выделенный блок 5 управления (фиг.4), принцип действия которого состоит в следующем.
В исходном состоянии вся последовательная логика блока управления обнулена. Для запуска блока 5 на вход СО подают короткий импульс, в ответ на что счетчик 16 команд устанавливает на своих разрядных выходах код, соответствующий десятичной единице (на младшем разряде логическая единица, на остальных все нули). После указанного на выходе DO1 дешифратора 19 появляется логическая единица (на остальных выходах DO - нули), разрешающая прохождение тактовых импульсов с выхода генератора 23 на тактовый выход CLK блока 5. Время наблюдения Т, в течение которого на выходе CLK действуют тактовые импульсы, отсчитывается счетчиком 17, коэффициент пересчета которого выбирается таким образом, чтобы на выходе Р переноса появился импульс после отсчета М тактовых импульсов (см. формулу (2)). По импульсу переноса счетчик 17 обнуляется, счетчик 16 инкрементирует свое содержимое, на выходах дешифратора 19 устанавливается распределение DO1=0, DO2=1, DO3=0, кроме того, прекращается поступление тактовых импульсов на выход CLK. При DO2=1 запускается адресный счетчик 18, который после перебора заданного объема адресов на шине А (количество адресов должно быть не меньше количества каналов N коррелятора 3) обнуляется, и далее импульс переноса воздействует на вход счетчика 16, в результате чего на выходах дешифратора 19 имеем DO1=0, DO2=0 и DO3=1. С положительным перепадом напряжения на выходе DO3 дешифратора 19 формируется импульс обнуления (выход RST), который вырабатывается одновибратором 24, срабатывающим только по положительным фронтам. Импульс обнуления подается в коррелятор 3 для обнуления накапливающих сумматоров 10, и это следует считать окончанием цикла измерений. Для начала следующего цикла следует обнулить счетчик 16 команд, который может обнуляться и автоматически, если выход RST (от одновибратора) соединить с обнуляющим входом указанного счетчика 16. Отметим также, что перед началом следующего цикла измерений следует обнулить и последовательную логику, выходящую в состав блока 15 усреднения.
Сравнение оценок автокорреляционных функций Куу(τ i) и Kxx(τ i) можно производить, не только вычисляя среднее отклонение (1), но и другими способами, например, путем нахождения отношения Kyy(τ i)/Kxx(τ i) и др. В каждом из случаев используется соответствующая выбранному алгоритму структура блока 4 сравнения. Неизменным для всех случаев остается лишь то, что для оценки уровня шумовой интермодуляции необходимо выяснить, как сильно отличаются автокорреляционные функции сигналов до и после нелинейного преобразования. Причем, как это видно из вышеописанного, при сравнении автокорреляционных функций, в отличие от прототипа, учитывается весь спектр частот, появившихся в результате интермодуляции составляющих входного шумового сигнала, что и позволяет повысить как информативность оценки, так и точность выявления объема вносимых искажений. Заметим, что под шумовым сигналом в данном случае подразумевается случайный сигнал с равномерным сплошным спектром по крайней мере в полосе частот пропускания фильтра 2 (или близкий к нему по спектральным свойствам процесс, например псевдослучайный).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ УРОВНЯ ШУМОВОЙ ИНТЕРМОДУЛЯЦИИ | 2003 |
|
RU2252425C2 |
| КОРРЕЛЯЦИОННЫЙ АНАЛИЗАТОР ЧАСТОТНЫХ СВОЙСТВ ЛИНЕЙНОЙ СИСТЕМЫ | 2003 |
|
RU2242013C2 |
| ДВУХКАНАЛЬНЫЙ КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ЧАСТОТНЫХ ИСКАЖЕНИЙ | 2009 |
|
RU2393492C2 |
| ОДНОКАНАЛЬНЫЙ КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ЧАСТОТНЫХ ИСКАЖЕНИЙ | 2009 |
|
RU2393491C2 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ГАРМОНИЧЕСКИХ ИСКАЖЕНИЙ (ВАРИАНТЫ) | 2003 |
|
RU2247996C2 |
| КОРРЕЛЯЦИОННОЕ УСТРОЙСТВО | 2002 |
|
RU2229156C2 |
| КОРРЕЛЯЦИОННЫЙ АНАЛИЗАТОР | 2002 |
|
RU2227321C2 |
| ДИСКРИМИНАТОР СЛУЧАЙНЫХ СИГНАЛОВ | 2002 |
|
RU2234729C2 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ВРЕМЕННЫХ СДВИГОВ | 2002 |
|
RU2229157C2 |
| СПОСОБ ИЗМЕРЕНИЯ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ СЛУЧАЙНЫХ СИГНАЛОВ И ЦИФРОВОЙ ИЗМЕРИТЕЛЬ (ВАРИАНТЫ) | 2003 |
|
RU2259570C2 |
Измеритель предназначен для оценки нелинейных искажений, вносимых трактами обработки или усиления низкочастотных сигналов, например, звуковых. Измеритель содержит генератор случайного сигнала, полосовой фильтр, коррелятор, блок сравнения и блок управления. Работа устройства основана на сравнении автокорреляционной функции случайного входного сигнала с автокорреляционной функцией случайного выходного сигнала. Оценка величины интермодуляционных искажений сводится к оценке степени изменения автокорреляционной функции сигнала, прошедшего через нелинейные цепи. В случае стационарного случайного входного сигнала автокорреляционная функция входного сигнала может быть вычислена один раз до начала измерений. Поскольку измеритель учитывает все составляющие шумового сигнала, появившиеся в результате интермодуляции, повышается информативность оценки и точность определения величины интермодуляционных искажений. 3 з.п. ф-лы, 4 ил.
| US 3694643 A, 26.09.1972 | |||
| СПОСОБ ИЗМЕРЕНИЯ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ ЧЕТЫРЕХПОЛЮСНИКОВ | 1998 |
|
RU2140089C1 |
| US 4028622 A, 07.06.1977 | |||
| СЫРИЦО А | |||
| Измерение нелинейных искажений на шумовом сигнале // Радио, 1999, №4, с.29-31. | |||

