В настоящее время для выявления поверхностных дефектов наиболее ответственных деталей используются бесконтактные методы контроля, в частности оптические профилометры, позволяющие получать информацию о глубине дефектов микронного уровня.
Известен способ определения глубины дефектов на поверхности объекта, заключающийся в том, что освещают объект немонохроматическим пучком света, наблюдают систему интерференционных полос в области дефекта, после чего перемещают объект вдоль оси освещаемого пучка света, измеряют расстояние между старым и новым положениями соседних интерференционных полос и по величине этого расстояния определяют глубину дефекта (см. а.с. СССР №1442817, кл. G 01 B 9/02, 11/30, 1988 г.).
Основным недостатком известного способа является его низкая производительность, связанная с тем, что осуществлять измерение перемещения интерференционных полос и определение по величине перемещения глубины дефекта возможно только в ручном режиме под микроскопом. При этом фактически оператор малым полем зрения микроскопа должен просмотреть всю поверхность детали и определить имеющиеся дефекты.
Наиболее близким к заявляемому техническому решению является способ контроля поверхностных дефектов на основе низкокогерентной интерферометрии (см. ANGEWANDTE OPTIK, ANNUAL REPORT 1992, р. 12, "Coherence radar as an accurate measuring tool on rough, opalescent surfaces").
Способ включает получение набора интерферограмм контролируемой поверхности при сканировании ее низкокогерентным источником излучения и восстановление по ним исходного профиля контролируемой поверхности. В отличие от традиционной лазерной интерферометрии, в этом случае, вследствие малой длины когерентности используемого полихроматического источника света, интеренференционное поле по глубине объекта имеет размеры порядка нескольких микрон, что позволяет эффективно селектировать информацию, соответствующую различным сечениям трехмерного объекта, и таким образом восстанавливать его профиль.
Основным недостатком известного способа является трудность выделения зон интерференции, что связано с неравномерностью рассеивающих свойств поверхности объекта, т.к. практически невозможно однозначно трактовать то ли это зона интерференции, то ли неравномерность рассеяния света.
Кроме того, точность измерения существенно зависит от однозначности определения границ зон интерференции.
Технической задачей настоящего изобретения является устранение указанного недостатка, а именно повышение качества получаемых интерферограмм за счет повышения точности локализации зон интерференции на контролируемой поверхности.
Указанная задача в способе измерения профиля поверхности, включающем получение набора интерферограмм контролируемой поверхности при сканировании ее низкокогерентным источником излучения и восстановление по ним исходного профиля контролируемой поверхности, достигается тем, с получением каждой основной интерферограммы снимают дополнительную интерферограмму при сдвиге опорной поверхности на дробную часть длины волны, после чего из сигнала основной интерферограммы вычитают сигнал дополнительной интерферограммы с получением дифференциальной интерферограммы, а по полученным дифференциальным интерферограммам восстанавливают исходный профиль контролируемой поверхности.
Указанное выполнение способа позволяет за счет получения дифференциальных интерферограмм исключить те участки поверхности, где есть рассеянное излучение от поверхности и нет зоны интерференции, т.к. сдвиг опорной поверхности не приводит к изменению рассеянного света, но приводит к изменению фазы интерференционной картины, а значит к изменению дифференциальной интерферограммы в зонах интерференции.
Целесообразно производить получение интерферограмм контролируемой поверхности, например, с помощью интерферометра Майкельсона, в основном плече которого устанавливают опорную поверхность с возможностью ее продольного перемещения, при этом в качестве осветителя используют частично-когерентное излучение. Частично-когерентное излучение позволяет локализовать зоны интерференции в пределах длины когерентности излучения.
Выгодно дополнительную интерферограмму снимать при сдвиге опорной поверхности на четверть длины волны эффективного излучения осветителя. Это связано с тем, что при сдвиге на четверть длины волны фаза интерференционной картины сдвигается на половину длины волны, т.е. находится в противофазе с основным сигналом, что дает максимальную амплитуду дифференциального сигнала, а соответственно, получают максимальный контраст при восстановлении изображения.
Перспективно в качестве осветителя использовать источник белого света, например лампу накаливания, которая обладает минимальной длиной когерентности, следовательно, обладает максимальной локализацией зон интерференции.
Заявляемый способ позволяет точно локализовать зоны интерференции, а значит восстанавливать с высокой точностью исходный профиль контролируемой поверхности, что не имеет аналогов в оптической микроскопии, а следовательно, соответствует критерию “изобретательский уровень”.
На фиг.1 приведен рисунок устройства, поясняющего реализацию способа.
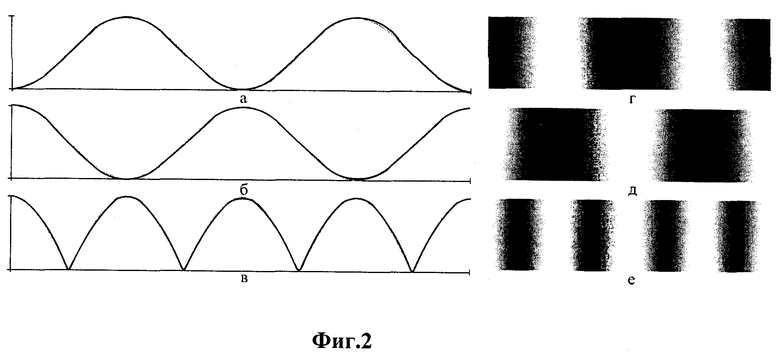
На фиг.2 приведен рисунок, поясняющий принцип получения дифференциальных интерферограмм при сдвиге опорного плеча на четверть длины волны устройства: а) - исходной сигнал, б) - инверсный сигнал, в) - дифференциальный сигнал. Профили интенсивности соответствующие указанным сигналам.
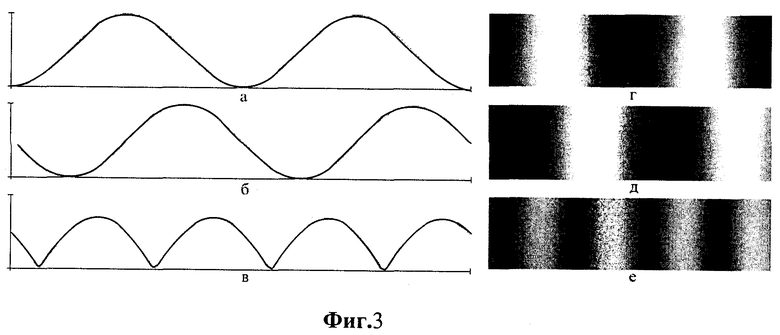
На фиг.3 приведен рисунок, поясняющий принцип получения дифференциальных интерферограмм при приближении опорного плеча на одну восьмую длины волны устройства: а) - исходной сигнал, б) - инверсный сигнал, в) - дифференциальный сигнал. Профили интенсивности, соответствующие указанным сигналам.
На фиг.4 приведен рисунок, поясняющий принцип получения дифференциальных интерферограмм при удалении опорного плеча на одну восьмую длины волны устройства: а) - исходной сигнал, б) - инверсный сигнал, в) - дифференциальный сигнал. Профили интенсивности, соответствующие указанным сигналам.
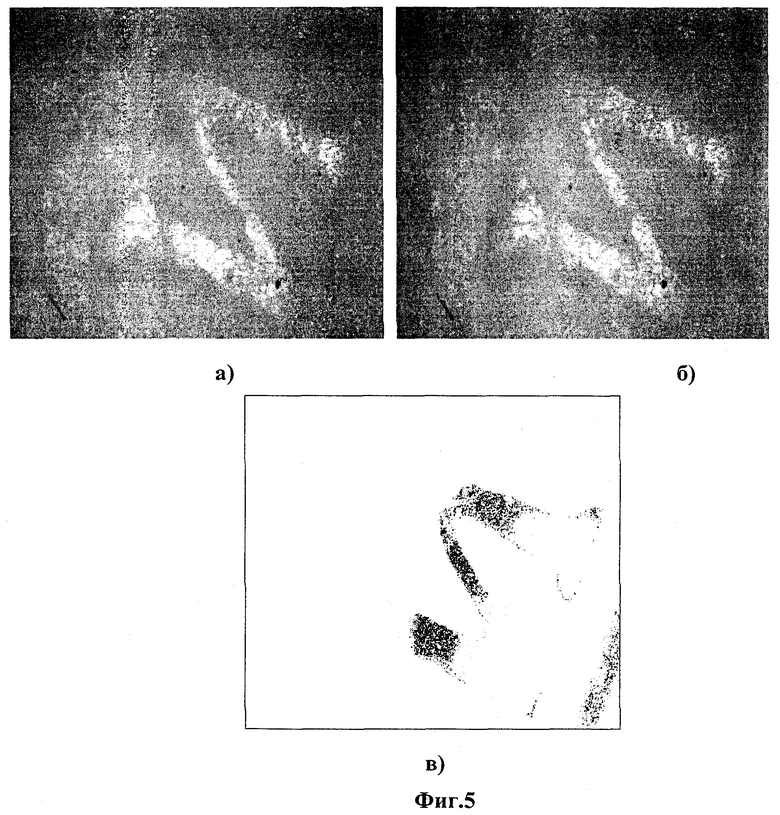
На фиг.5 приведены: а) - основная и б) - дополнительная интерферограммы, снятые со сдвигом на четверть длины волны, а также в) - дифференциальная интерферограмма, полученная путем вычитания дополнительной интерферограммы из основной.
На фиг.6 приведен: а) - набор дифференциальных интерферограмм при различных смещениях объекта (шаг сканирования 5 мкм), б) - результат восстановления трехмерного изображения профиля и в) - карта изолиний глубины.
Устройство для реализации заявляемого способа содержит: осветитель 1, объектив 2, полупрозрачное зеркало 3, объективы 4, 5 и 6; измеряемый объект 7; эталонный объект 8; ПЗС камера 9.
Устройство работает следующим образом.
Осветитель 1 через объектив 2 освещает полупрозрачное зеркало 3 параллельным пучком света, половина излучения которого проходит через объектив 4 и освещает измеряемый объект 7, а другая половина излучения проходит через объектив 5 и освещает эталонный объект 8. Отраженная от измеряемого объекта 7 часть света через объектив 4 падает на полупрозрачное зеркало 3 и, частично отражаясь от него, через объектив 6 попадает на вход ПЗС камеры 9. Туда же попадает свет, отраженный от эталонного объект 8 через объектив 5, полупрозрачное зеркало 3 и объектив 6. Таким образом получают сигнал основной интерферограммы. После этого эталонный объект 8 сдвигается на дробную часть длины волны, например на четверть, и измерение повторяется. При этом ПЗС камера 9 фиксирует дополнительную интерферограмму. Вычитая из сигнала основной интерферограммы сигнал дополнительной интерферограммы получают разностный сигнал дифференциальной интерферограммы, который позволит локализовать только те зоны, в которых изменился сигнал при изменении фазы длины волны излучения, т.е. в тех зонах, где наблюдается истинная интерференционная картина.
Пример 1. Для получения интерферограммы рельефа поверхности (фиг.5в) использовали основную (5а) и дополнительную (5б) интерферограммы, снятые со сдвигом на четверть длины волны, а также дифференциальную интерферограмму, полученную путем вычитания дополнительной интерферограммы из основной.
Пример 2. Для получения интерферограммы рельефа поверхности (фиг.6б) использовали набор дифференциальных интерферограмм при различных смещениях объекта (шаг сканирования 5 мкм) (фиг.6а).
Таким образом, заявляемый способ позволяет с высокой точностью локализовать зоны интерференции и восстановить с высокой точностью исходный профиль контролируемой поверхности.


Способ измерения профиля поверхности включает получение набора интерферограмм контролируемой поверхности при сканировании ее низкокогерентным источником излучение и восстановление по ним исходного профиля контролируемой поверхности. При этом с получением каждой основной интерферограммы снимают дополнительную интерферограмму при сдвиге опорной поверхности на дробную часть длины волны, после чего из сигнала основной интерферограммы вычитают сигнал дополнительной интерферограммы с получением дифференциальной интерферограммы, а по полученным дифференциальным интерферограммам восстанавливают исходный профиль контролируемой поверхности. Технический результат - повышение качества интерферограмм за счет локализации зон интерференции на контролируемой поверхности. 3 з.п. ф-лы, 6 ил.

| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ТРЕХМЕРНЫХ МИКРООБЪЕКТОВ И МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2145109C1 |
| RU 2000125117 A, 27.09.2002 | |||
| СПОСОБ ИНТЕРФЕРЕНЦИОННОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ОПТИЧЕСКИХ ДЕТАЛЕЙ | 1998 |
|
RU2166730C2 |
| Складная коробка для фруктов и овощей | 1977 |
|
SU884560A3 |
| DE 3443175 A, 27.06.1985 | |||
| US 5355221 A, 11.10.1994. | |||

