Настоящее изобретение относится к способу коррекции угловой погрешности датчика абсолютного углового положения, регистрирующего угловое положение первого вала, вращательное движение которого взаимосвязано со вращением второго вала.
Подобный способ используется прежде всего для определения углового положения распределительного вала двигателя внутреннего сгорания (ДВС). Поэтому нижепредлагаемый в изобретении способ рассмотрен в качестве примера применительно к ДВС.
С целью обеспечить надежное функционирование современных систем управления двигателем необходимо непрерывно регистрировать с высокой точностью частоту вращения и угловое положение коленчатого и распределительного валов. Для определения частоты вращения коленчатого вала, как известно, применяют импульсный датчик с вращающимся синхронно с коленчатым валом зубчатым диском, который имеет шестьдесят минус две угловых меток и который сканируется указанным датчиком. В качестве такого датчика обычно используют индуктивный датчик, магниторезистивный датчик или датчик Холла.
Для получения достаточно полной информации о текущем рабочем цикле двигателя необходимо дополнительно определять абсолютное угловое положение распределительного вала.
В современных системах управления работой двигателя угловое положение распределительного вала регистрируется посегментно. С этой целью используют специальный диск, который вращается синхронно с распределительным валом и имеет, например, четыре угловые метки и который сканируется соответствующим датчиком. Уровень выдаваемого этим датчиком выходного сигнала изменяется несколько раз за один оборот распределительного вала. Таким путем точную информацию о текущем угловом положении распределительного вала удается получать только при прохождении мимо датчика границ между сегментами, т.е. при прохождении мимо датчика тех участков диска, где изменяется уровень выходного сигнала этого датчика. В угловом интервале между этими границами между сегментами информация о точном угловом положении распределительного вала отсутствует.
Непрерывное определение углового положения распределительного вала позволяет оптимизировать систему управления двигателем, поскольку в блоке управления в этом случае в любой момент имеется информация о текущем угловом положении вала. Тем самым создается возможность повысить надежность работы существующих систем управления двигателем и при необходимости расширить функциональные возможности подобных систем.
Так, например, непрерывное определение углового положения распределительного вала позволяет оперативно диагностировать датчик частоты вращения или даже быстро и сравнительно просто диагностировать непосредственно датчик абсолютного углового положения, подвергая контролю на достоверность его сигнал. Помимо этого появляется возможность надежно и сравнительно просто определять угловое положение распределительного вала в момент пуска двигателя. Кроме того, создается возможность с высокой надежностью определять момент остановки или глушения двигателя и снижение частоты вращения его вала ниже номинальной, определять направление вращения и ускорить синхронизацию процессов, протекающих при пуске двигателя, с целью облегчить такой пуск двигателя. Помимо этого появляется возможность улучшить работу двигателя при отказе датчика частоты вращения и непосредственно запускать двигатель только с использованием датчика абсолютного углового положения.
Из заявки DE 19722016 А1 известен датчик абсолютного углового положения, который позволяет непрерывно определять угловое положение распределительного вала. Работа этого известного датчика абсолютного углового положения основана на сочетании эффекта Холла и магниторезистивного эффекта. С этой целью в таком известном датчике абсолютного углового положения используются два чувствительных элемента, работа одного из которых основана на эффекте Холла, а другого - на магниторезистивном эффекте. Выдаваемые обоими чувствительными элементами сигналы комбинируют между собой.
Подобный известный датчик абсолютного углового положения позволяет определять угловое положение распределительного вала с получением результатов измерений, которые лишь в незначительной степени зависят от температуры и давления, и одновременно с высоким разрешением. При этом такой датчик позволяет точно определять угловое положение во всем интервале изменения угла, равном 360°, что позволяет использовать его для измерения абсолютного углового положения распределительного вала ДВС.
Несмотря на то, что с использованием этого известного датчика абсолютного углового положения можно создать систему управления двигателем, которая обеспечивает более легкий и быстрый пуск двигателя, что позволяет снизить нагрузку на аккумуляторную батарею, стартер и генератор и тем самым уменьшить размеры этих узлов, и которая за счет надежного распознавания направления вращения позволяет избежать обратных вспышек во впускном трубопроводе, что в свою очередь позволяет, например, снизить технические требования, предъявляемые к впускному трубопроводу и дроссельной заслонке двигателя. Недостаток этого известного датчика, однако, состоит в том, что он лишь с трудом способен обеспечить требуемую точность определения углового положения распределительного вала с угловой погрешностью, составляющей менее примерно одного-двух градусов угла поворота этого вала. Этот недостаток в основном связан с разбросом механических параметров, обусловленным погрешностями сборки и монтажа датчика, с разбросом механических параметров, обусловленным погрешностями сборки и монтажа магнита, с неоднородностью магнитного поля, с наличием у распределительного вала определенной некруглости, а также с определенным разбросом электрических и механических параметров самого чувствительного элемента датчика.
Из заявки DE 19750024 А1 известен способ компенсации погрешностей, возникающих при монтаже зубчатого диска импульсного датчика, для чего сначала определяют фактическое рассогласование в угловых положениях по меньшей мере одной метки на этом зубчатом диске и по меньшей мере одной метки на соединенном с другим валом контрольном или эталонном зубчатом диске, после чего это фактическое рассогласование сравнивают с заданным значением рассогласования и полученное значение, характеризующее отклонение фактического рассогласования от заданного значения рассогласования, сохраняют в качестве погрешности монтажа зубчатого диска импульсного датчика. При этом зубчатый диск может быть соединен с распределительным валом, а эталонный диск - с коленчатым валом ДВС.
Несмотря на то, что этот известный способ и позволяет скорректировать погрешность, обусловленную неточным монтажом зубчатого диска импульсного датчика, тем не менее такой способ не позволяет корректировать погрешности, которые обусловлены воздействием на датчик абсолютного углового положения многочисленных взаимосвязанных факторов. Так, в частности, этот известный способ не позволяет корректировать погрешность, которая возникает независимо от корректируемой с помощью такого способа погрешности монтажа, при этом вызванное ошибкой отклонение может быть положительным или отрицательным.
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача разработать способ коррекции угловой погрешности датчика углового положения, который позволял бы практически полностью компенсировать угловую погрешность датчика абсолютного углового положения, при этом такая компенсация должна обеспечиваться в любом угловом положении первого вала за полный его оборот и с учетом всех факторов, которые могут привести к появлению погрешности при определении углового положения.
Указанная задача решается согласно изобретению благодаря тому, что датчик углового положения представляет собой датчик абсолютного углового положения, при этом сначала по меньшей мере за один полный оборот первого вала регистрируют соответствующее угловое положение второго вала и на основании полученных измеренных значений определяют соответствующее угловое положение первого вала, после чего соответствующее выходное значение датчика абсолютного углового положения сравнивают с соответствующим угловым положением первого вала, сохраняя значение полученного в результате этого сравнения рассогласования, и затем каждое из рассчитываемых соответствующих выходных значений датчика абсолютного углового положения корректируют на соответствующее сохраненное значение.
Согласно одному из предпочтительных вариантов осуществления предлагаемого в изобретении способа многократно определяют соответствующие конкретным угловым положениям погрешности и затем эти погрешности усредняют, при этом полученные средние значения сохраняют и используют для коррекции.
Соответствующую конкретному угловому положению погрешность предпочтительно определять непрерывно.
Благодаря тому, что сначала по меньшей мере за один полный оборот первого вала регистрируют соответствующее угловое положение второго вала и на основании полученных значений определяют соответствующее угловое положение первого вала, создается возможность выявить все погрешности, проявившиеся за полный оборот вала. Иными словами, подобный подход позволяет выявить не только погрешности, возникшие при монтаже зубчатого диска на первом валу, но и, кроме того, все иные погрешности в работе датчика абсолютного углового положения. Так, в частности, предусмотренное согласно изобретению сравнение соответствующего выходного значения датчика абсолютного углового положения с соответствующим угловым положением первого вала позволяет выявлять величину рассогласования между фактическим и заданным угловыми положениями, которое, например, в начале совершаемого первым валом полного оборота может иметь отрицательное значение, а затем в ходе дальнейшего поворота этого вала приобретать положительное значение.
Сохраняя полученное при каждом сравнении значение рассогласования и затем корректируя каждое из соответствующих выходных значений датчика абсолютного углового положения на соответствующее сохраненное значение, создается возможность корректировать выходное значение датчика абсолютного углового положения уже на втором обороте первого вала. Сохраненные значения могут храниться в памяти блока управления и при выключенном двигателе, что при следующем пуске двигателя позволяет использовать эти сохраненные в памяти значения для коррекции выходного значения датчика абсолютного углового положения уже при совершении первым валом первого оборота.
Преимущество, связанное с усреднением нескольких значений погрешности, состоит в возможности практически полностью устранить отрицательное влияние появляющихся при определенных условиях пиковых значений. Однако наиболее предпочтительно, как указывалось выше, определять соответствующие конкретным угловым положениям погрешности непрерывно, т.е. на каждом обороте вала.
Для коррекции погрешности в интервале между двумя дискретными значениями предпочтительно использовать значение, полученное на основании этих двух значений интерполяцией. Подобный подход позволяет корректировать выходные значения датчика абсолютного углового положения и в том случае, когда первый вал находится в положении, в котором датчик, используемый для определения углового положения второго вала, не выдает измерительный сигнал, как это, например, имеет место в случае, когда напротив этого датчика находится впадина между двумя зубьями зубчатого диска, установленного на втором валу.
Другие отличительные особенности настоящего изобретения более подробно рассмотрены ниже на примере одного из конкретных вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схема устройства для осуществления предлагаемого в изобретении способа,
на фиг.2 - схема микроконтроллера, показанного на фиг.1,
на фиг.3 - характеристика выходного сигнала датчика абсолютного углового положения и
на фиг.4 - характеристика изменения поправки, вносимой в сигнал, характеристика которого показана на фиг.3.
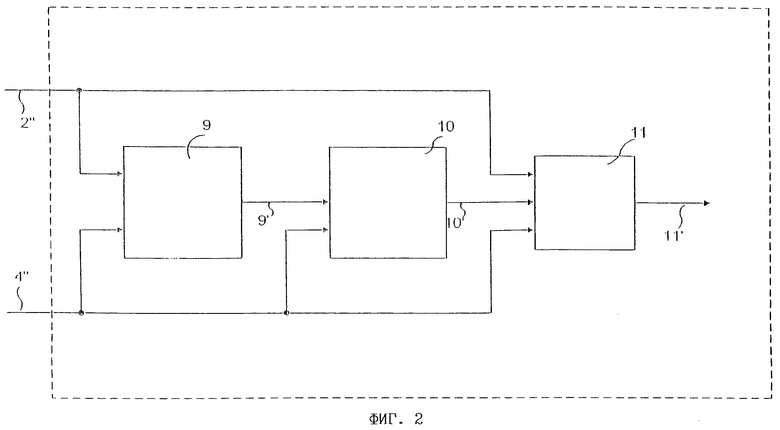
Как показано на фиг.1, на распределительном валу 1 ДВС установлен датчик 2 абсолютного углового положения. На коленчатом валу 3 ДВС установлен датчик 4 угла поворота. Работа датчика 2 абсолютного углового положения основана на использовании эффекта Холла в сочетании с магниторезистивным эффектом. Датчик 4 угла поворота выполнен в виде обычного индуктивного датчика, который при прохождении мимо него каждой из боковых сторон зубьев соединенного с коленчатым валом 3 зубчатого диска 3а выдает соответствующий сигнал.
Выходной сигнал 2’ датчика 2 абсолютного углового положения поступает в первую схему 5 обработки. Выходной сигнал 4’ датчика 4 угла поворота поступает во вторую схему 6 обработки. Выдаваемый первой схемой 5 обработки обработанный сигнал 2’’ датчика 2 абсолютного углового положения поступает в микроконтроллер 7. Выдаваемый второй схемой 6 обработки обработанный сигнал 4’’ датчика 4 угла поворота также поступает в микроконтроллер 7. Первая схема 5 обработки, вторая схема 6 обработки, а также микроконтроллер 7 являются компонентами блока 8 управления.
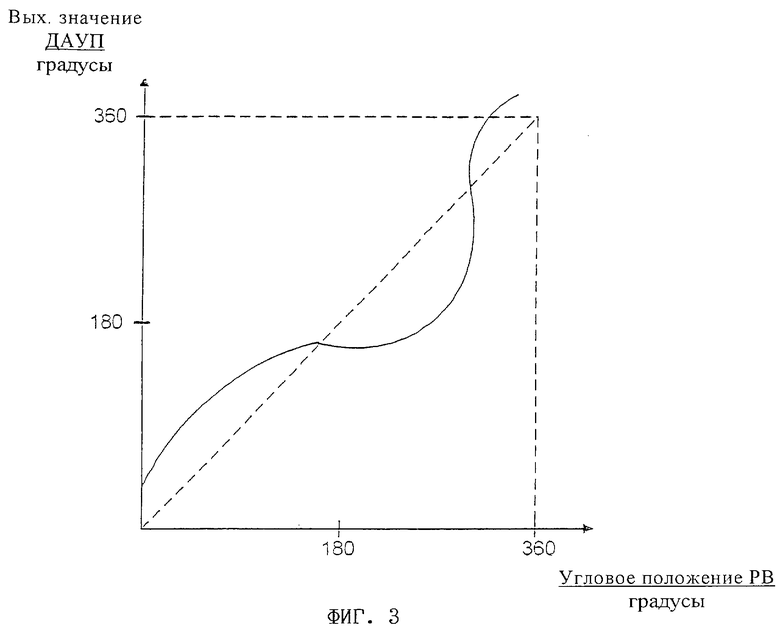
Затем в микроконтроллере 7, как показано на фиг.2, на основании обработанного выходного сигнала 2’’ датчика 2 абсолютного углового положения, а также обработанного выходного сигнал 4’’ датчика 4 угла поворота сначала в каскаде 9 определяется величина рассогласования между выходным сигналом датчиком 2 абсолютного углового положения и используемым в качестве опорного сигнала выходным сигналом датчика 4 угла поворота. Значение выдаваемого первым каскадом 9 разностного сигнала 9’ поступает в запоминающий каскад. Сохраненное в запоминающем каскаде 10 значение выдается далее в качестве поправки в виде корректирующего сигнала 10’ в каскад 11 коррекции. В этот каскад 11 коррекции поступает также обработанный выходной сигнал 2' датчика 2 абсолютного углового положения. В этом каскаде 11 коррекции обработанный выходной сигнал 2’’ датчика 2 абсолютного углового положения корректируется на сохраненное значение корректирующего сигнала 10’. Выдаваемый каскадом 11 коррекции выходной сигнал 11’ в основном соответствует фактическому угловому положению распределительного вала 1.
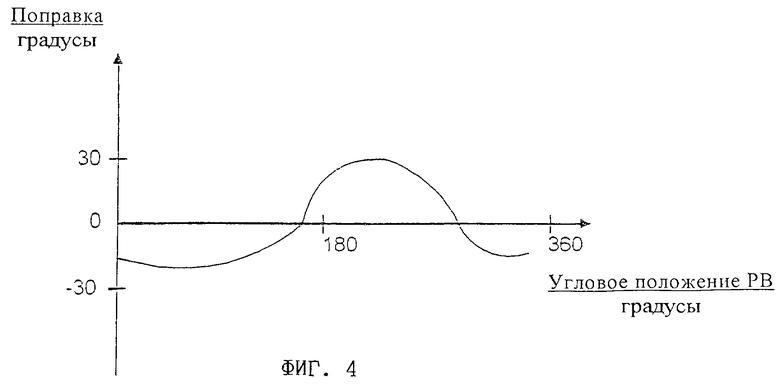
На фиг.3 в качестве примера показана характеристика обработанного выходного сигнала 2’’ датчика 2 абсолютного углового положения (ДАУП) в зависимости от фактического углового положения распределительного вала (РВ) 1. При этом для сравнения в виде прерывистой линии показана характеристика выходного сигнала датчика 2 абсолютного углового положения, которая соответствует требуемым заданным значениям этого сигнала. Как показано на фиг.3, рассогласование обработанного выходного сигнала 2’’ датчика 2 абсолютного углового положения составляет сначала примерно плюс 30°. В угловом положении, соответствующем повороту распределительного вала на угол примерно 150°, рассогласование кратковременно отсутствует. В интервале от 150° до примерно 190° рассогласование имеет отрицательное значение и составляет примерно минус 30°. В угловом положении, соответствующем повороту распределительного вала на угол примерно 290°, величина рассогласования вновь уменьшается до нулевой, меняя знак на положительный, при этом в угловом положении, соответствующем одному полному обороту распределительного вала на угол примерно 360°, рассогласование вновь составляет примерно плюс 30°.
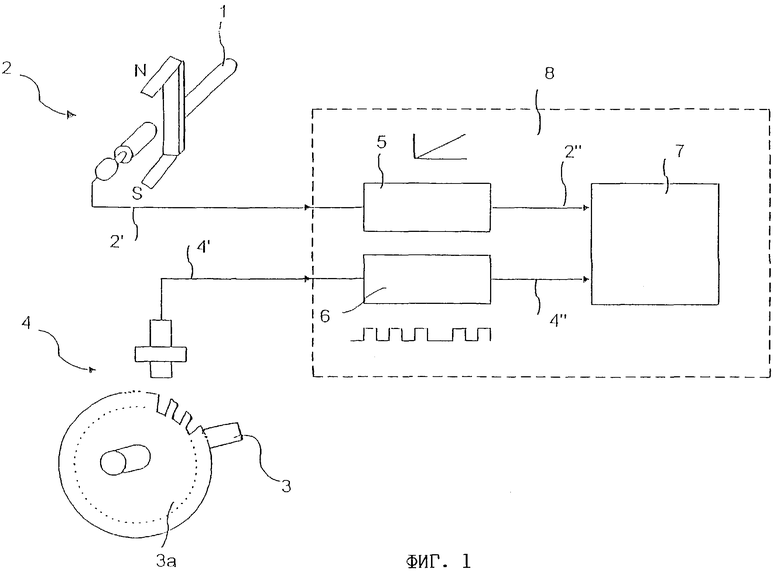
На фиг.4 показана характеристика изменения поправки, формируемой в каскаде 11 коррекции. Эта поправка в каждый момент соответствует по модулю величине рассогласования выходного сигнала датчика 2 абсолютного углового положения, но имеет противоположный знак.
Изобретение относится к способу коррекции угловой погрешности датчика абсолютного углового положения, регистрирующего угловое положение первого вала, вращательное движение которого взаимосвязано со вращением второго вала. Изобретение может быть использовано для определения углового положения распределительного вала двигателя внутреннего сгорания. Датчик углового положения представляет собой датчик абсолютного углового положения. При этом сначала по меньшей мере за один полный оборот первого вала регистрируют соответствующее угловое положение второго вала и на основании полученных измеренных значений определяют соответствующее угловое положение первого вала. После этого соответствующее выходное значение датчика абсолютного углового положения сравнивают с соответствующим угловым положением первого вала, сохраняя значение полученного в результате этого сравнения рассогласования. А затем каждое из рассчитываемых соответствующих выходных значений датчика абсолютного углового положения корректируют на соответствующее сохраненное значение. Технический результат заключается в возможности практически полностью компенсировать угловую погрешность датчика абсолютного углового положения. 3 з.п. ф-лы, 4 ил.
| Способ очистки плавикового шпата | 1973 |
|
SU497237A1 |
| US 5671145 А, 23.09.1997 | |||
| DE 19750024 А1, 20.05.1999 | |||
| US 5117681 А, 02.06.1992 | |||
| ДАТЧИКОВАЯ УСТАНОВКА ДЛЯ РАСПОЗНАВАНИЯ ЦИЛИНДРОВ В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ С n ЦИЛИНДРАМИ И СИСТЕМА ДЛЯ ЕЕ ПРИМЕНЕНИЯ | 1992 |
|
RU2104404C1 |

