Изобретение относится к измерительной технике и может быть использовано для бесконтактного определения угла поворота и углового положения вала, скорости и направление вращения.
Известны абсолютные датчики угла поворота (энкодеры) фирмы SICK серии ARS 60 и ATM 60 ATM 90 (www.stegmann.com), в которых используется кодирующий диск в сочетании с оптической и магниторезистивной технологиями и технологией зубчатых передач. Информация с кодирующего диска преобразуется в цифровую форму, но устройство такого энкодера достаточно сложное, содержит большое количество трущихся деталей, имеет ограниченный температурный диапазон и число оборотов, а чувствительные элементы - фототранзисторы и датчики Холла.
Известен также бесконтактный программируемый датчик абсолютного углового положения в 360°, описанный в патенте РФ № 2312363 С1 от 31.01.2006. Датчик состоит из двух механически не взаимосвязанных и изолированных друг от друга частей с постоянным зазором в пространстве между ними, одной частью является роторный узел, другая часть представляет собой статор - совокупность неподвижных механических и электронных частей, обеспечивающих через контактный интерфейс выдачу информации об угловом положении ротора с магнитом. Информация обрабатывается с использованием функции арктангенса сигналов интегрированного крестообразного массива элементов Холла.
Применение в энкодерах датчиков Холла, а не магниторезисторов можно отнести к недостаткам, т.к. магниторезистивные датчики обладают рядом существенных преимуществ по сравнению с датчиками Холла, а именно:
- применение магниторезисторов обеспечивает широкий выбор магнитов для организации магнитной системы независимо от их остаточной намагниченности (но в пределах значения поля насыщения);
- магниторезистор работает в области насыщении, что приводит к независимости выходного сигнала от дрейфа во времени и воздействия температуры, широкому интервалу механических допусков - расстояния между магнитом, закрепленным на оси вращающегося механизма, и сенсором;
- диапазон рабочих температурных магниторезистивных датчиков составляет от -60°С до +160°С, а также они обладают радиационной стойкостью.
Известны датчики фирмы Honeywell типа НМС 1501 и НМС 1512 (application note AN 211, Honeywell, Solid State Electronics Center, www.magneticsensor.com), в которых в качестве считывающего устройства используются магниторезисторы, а также датчики фирмы Philips типа КМА220. (Dual channel programmable angle sensor. www.nxp.com. Present by 2012). При этом на валу крепится магнит для формирования необходимого магнитного поля. Недостатком данных датчиков является ограниченный диапазон измерения угла, а именно, однозначное определение угла поворота вала с помощью одного сенсора возможно только в диапазоне ±45°, а при использовании двух сенсоров, расположенные под углом 45"относительно друг друга, диапазон ограничен значениями ±90° (0-180)°, ввиду физических особенностей анизотропного магниторезистивного эффекта и работы магниторезисторов в области насыщения.
Имеются разработки датчиков на основе гигантского магниторезистивного эффекта в спин-вентильных или спин-туннельный структурах, выполненные фирмами, например, ф. Infineon, www.Infineon.com, (TLE5012B), ф. MDT www.aecsensors.com (TMR3101), ф-Nonvolatile Electronics (www.nve.com), которые могут обеспечить диапазон измерения углов (0-360)° при использовании двух датчиков. Однако технология формирования спин-вентильных или спин-туннельных структур очень сложна - требуется нанесение магнитных и немагнитных слоев толщиной ~ 10Å, использования для этого специализированных установок, необходимо формирование начального смещения и т.д.
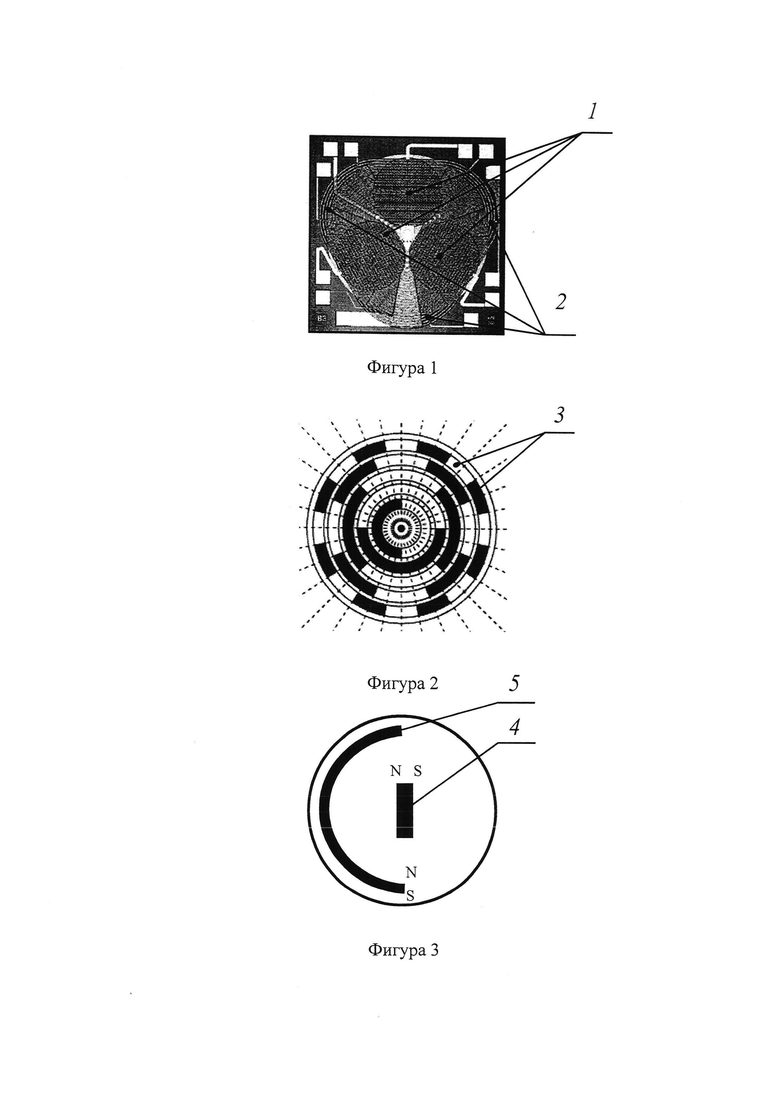
Фирма HL-Planartechnik разработала датчик KMR360 на основе анизотропных магниторезисторов, обеспечивающий измерение угла поворота в диапазоне 0-360° (www.hlplanar.com), представленный на фиг. 1. Датчик включает в себя три магниторезистивных моста 1, расположенных под углом 120° относительно друг друга и специализированную планарную катушку 2, напыленную поверх магниторезистивных мостов. Вращение магнита, закрепленного на валу, приводит к изменению сопротивления магниторезистивных мостов, на выходе которых формируются три сигнала синусоидальной формы, имеющие фазовый сдвиг относительно друг друга. Формируются отношения выходных сигналов магниторезистивных мостов, вычисляются три значения угла поворота ωn и среднее значение углов. Затем в планарную катушку подается импульс тока величиной +10 мА, измеряются выходные сигналы с трех сенсоров, далее подается импульс тока величиной -10 мА и проводятся повторные измерения. Вычисляются разности выходных сигналов для каждого сенсора при протекании тока в прямом и обратном направлениях. Если выходное напряжение и разность выходных напряжений, полученные с того или иного моста соответствующего углового сектора, выше или ниже определенных установленных пороговых значений, то принимается решение о добавлении (или вычитании) к значению среднего угла величины 180° и величины ωn. С целью повышения точности определения угла до уровня <1° для вычисления среднего значения угла кроме выходных напряжений с магниторезистивных мостов предлагается, дополнительно, использовать, выходные напряжения с полумостов.
К основным недостаткам датчика углового положения можно отнести:
- большое количество промежуточных вычисляемых параметров, необходимых для получения конечного результата, а именно 25;
- большое количество логический операций при сравнении выходных напряжений и их разностей с пороговыми значениями, а именно, 18, что также усложняет алгоритм работы и снижает быстродействие;
- необходимость в буферном каскаде для формирования импульсов тока прямой и обратной направленности, что приводит к увеличению потребляемой мощность и усложнению схемы управления;
- необходимость формирования планарной катушки, что приводит к усложнению топологии и процесса изготовления сенсора.
Известен также датчик абсолютный датчик угла поворота на основе магниторезисторов, описанный в патенте № 2 436 037 С1, опубл. 10.12.2011 бюл. № 34, который выбран как прототип. Датчик обеспечивает измерение углов в диапазоне (0-360)° и включает магнитную систему фиг. 2, связанную с вращающимся валом, считывающее устройство, содержащее чувствительные элементы и схему обработки сигнала, установленное с зазором относительно магнитной системы. Магнитная система (фиг. 2) выполнена в виде кодирующего магнитного диска, содержащего дорожки с магнитными элементами 3, образующие код Грея, причем одна часть магнитных элементов сдвинута к наружной половине, а другая - к внутренней половине дорожек, а чувствительные элементы представляют линейку из магниторезистивных чувствительных элементов (МРЧЭ), которые выполнены в виде мостов Уинстона. Плечи моста пространственно разнесены так, что два противолежащих плеча моста противостоят магнитным элементам наружной половины дорожки, а два других противолежащих плеча - магнитным элементам внутренней половины дорожки. При вращении формируется разнополюсный выходной сигнал вследствие разнесения плеч моста, и раздельного воздействия на них полями магнитных элементов в строго определенной последовательности (код Грея). Эта последовательность обеспечивается воздействием кодирующего магнитного диска либо на одну половину моста Уинстона (активная единица), либо на вторую - (активный нуль). Датчик обладает следующими недостатками:
- при заданном объеме датчика уменьшение размеров кодового диска или увеличение числа кодовых дорожек (разрядности диска) для повышения разрешающей способности и уменьшения погрешности в какой-то момент неизбежно приведет к перекрытию магнитных полей соседних кодовых дорожек диска и искажению кода Грея;
- аналогичная ситуация возникает и с линейкой МРЧЭ, при уменьшении размеров которых и расстояний между соседними МРЧЭ диаграммы направленности соседних МРЧЭ начнут перекрываться и это приведет к ложным срабатываниям и выдачи не верной последовательности кода;
- сложная технология формирования магнитной системы диска (сегментов кодового диска), с одновременным радиальным намагничиванием сегментов.
Задачей, на решение которой направлено предлагаемое техническое решение, является создание датчика на основе анизотропных магниторезистивных сенсоров, обеспечивающего измерение углового положения вращающегося механизма в диапазоне (0-360)°, обладающего высокой разрядностью и низкой погрешностью, помехозащищенностью с более простой конструкцией и схемой обработки сигнала, с минимальным количеством логических операций.
Техническим результатом изобретения является увеличение разрядности (разрешающей способности) и уменьшение погрешности датчика, высокая помехозащищенность, повышение технологичности изготовления и быстродействия, упрощение конструкции датчика и схемы обработки сигнала.
Технический результат достигается тем, что в абсолютном датчике угла поворота, включающем магнитную систему, жестко связанную с вращающимся механизмом, считывающее устройство, состоящее из четырех магниторезистивных чувствительных элементов выполненных в виде мостов Уинстона, расположенное соосно и с зазором относительно магнитной системы, и схему обработки, магнитная система выполнена в виде диска с вмонтированными в него двумя постоянными магнитами, один из которых прямоугольной формы с осевой намагниченностью, расположенный в центре диска, другой - дугообразный с радиальной намагниченностью, выполненный в форме дуги полуокружности с центром, совпадающим с центром диска. Два из четырех магниторезистивных чувствительных элементов размещены в центре считывающего устройства, имеют общий центр и развернуты под углом 45°относительно друг друга. Третий и четвертый расположены по окружности относительно центра с радиусом, равным радиусу дугообразного магнита магнитной системы, причем одна пара противолежащих плеч моста третьего чувствительного элемента разнесена от другой симметрично относительно центра на расстояние диаметра дугообразного магнита. Линии, соединяющие первую пару противолежащих плеч моста третьего чувствительного элемента, центр первого или второго магниторезистивного чувствительного элемента и центр четвертого магниторезистивного чувствительного элемента образуют один равнобедренный прямоугольный треугольник. Линии, соединяющие вторую пару противолежащих плеч моста третьего чувствительного элемента, центр первого или второго магниторезистивного чувствительного элемента и центр четвертого магниторезистивного чувствительного элемента второй равнобедренный прямоугольный треугольник.
На фигуре 1 представлена топология трех магниторезисторов датчика KMR360, где:
1 - МРЧЭ, расположенные под углом 120° относительно друг друга;
2 - планарная катушка.
На фигуре 2 показан магнитный диск с кодом Грея, где 3 - дорожки, расположенные концентрично относительно центра диска, формирующие код Грея.
Предлагаемый абсолютный датчик угла поворота поясняют фигуры 3-9.
На фигуре 3 показан диск с двумя постоянными магнитами.
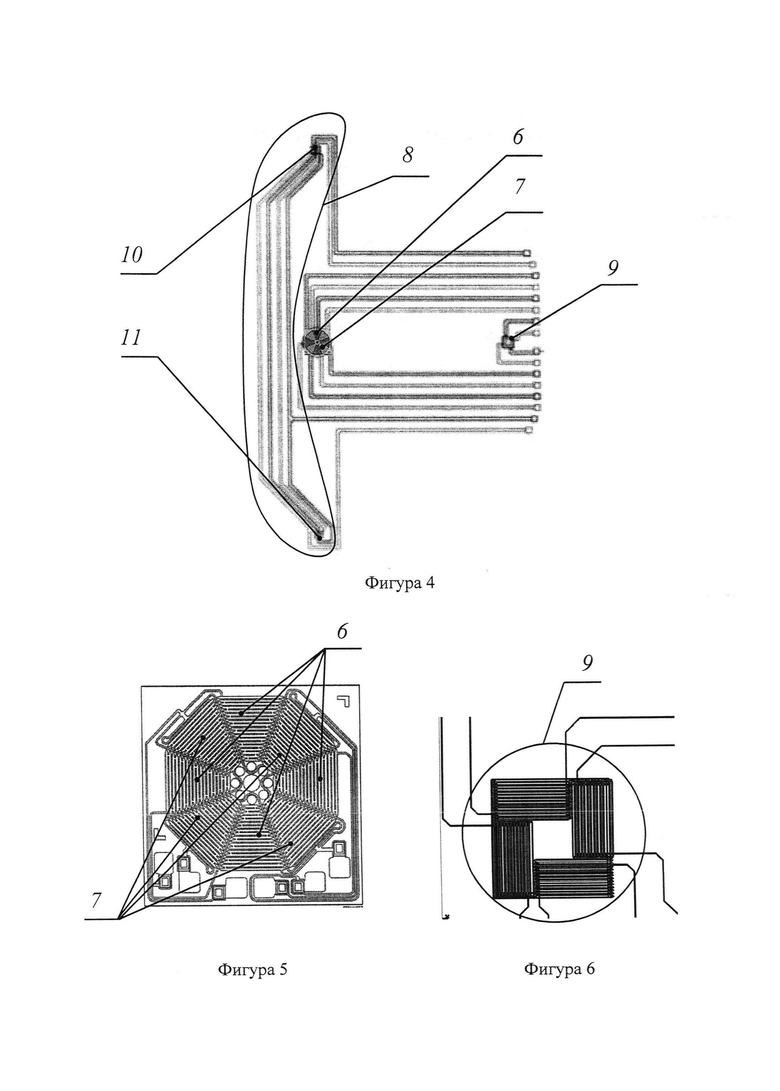
На фигуре 4 показана топология из четырех МРЧЭ, выполненных в виде мостов Уинстона, и схема их размещения и соединений.
На фигуре 5 показана топология первого и второго МРЧЭ, имеющих общий центр и развернутых под углом 45°относительно друг друга.
На фигуре 6 показана топология третьего и четвертого МРЧЭ. Их топологии аналогичны, отличие состоит в том, что противолежащие плечи моста третьего МРЧЭ пространственно разнесены относительно друг друга.
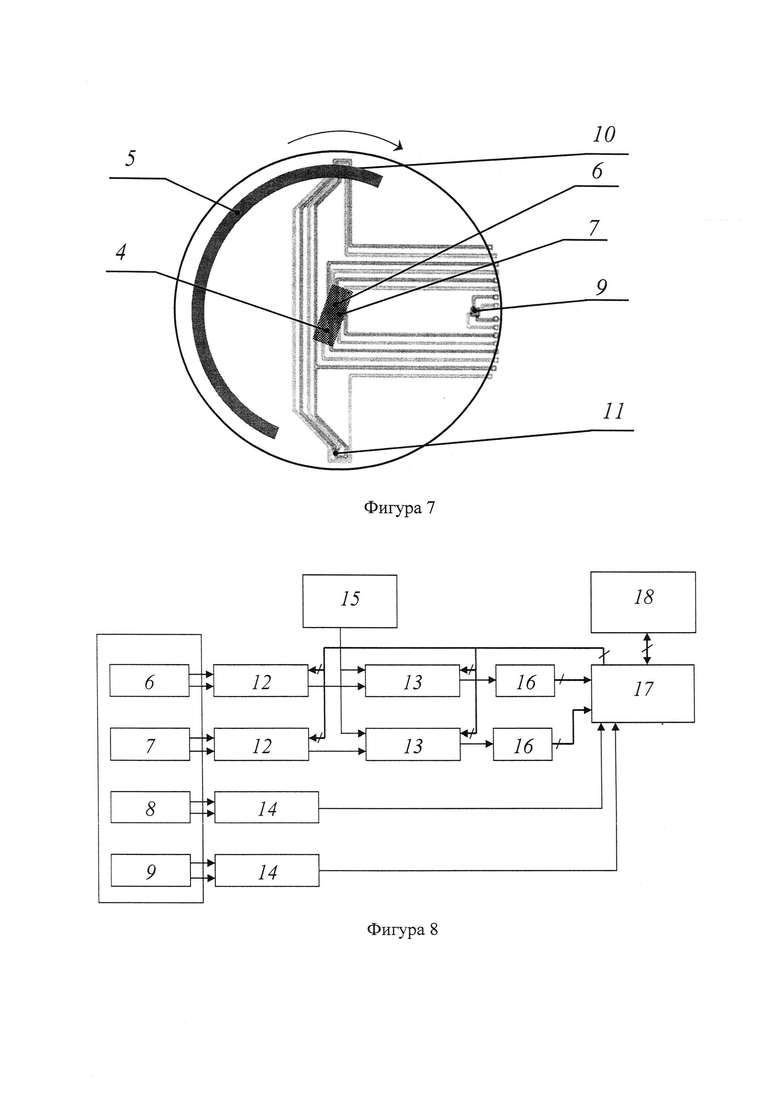
На фигуре 7 приведены элементы предлагаемого абсолютного датчика угла их взаимное расположение, стрелкой показано направление вращения диска.
На фигуре 8 представлена функциональная схема датчика угла поворота.
На фигурах 3-8 введены следующие обозначения:
4 - магнит прямоугольной формы с осевой намагниченностью, расположенный в центре диска;
5 - дугообразный магнит с радиальной намагниченностью;
6 - первый МРЧЭ (МРЧЭ-1);
7 - второй МРЧЭ (МРЧЭ-2);
8 - третий МРЧЭ (МРЧЭ-3);
9 - четвертый МРЧЭ (МРЧЭ-4);
10 - одна пара противолежащих плеч моста третьего МРЧЭ;
11 - вторая пара противолежащих плеч моста третьего МРЧЭ;
12 - дифференциальный усилитель;
13 - программируемый усилитель;
14 - компаратор;
15 - делитель;
16 - аналого-цифровой преобразователь (АЦП);
17 - устройство обработки (микроконтроллер);
18- приемо-передатчик (интерфейс обмена),
На фигуре 9 приведены выходные сигналы после обработки в зависимости от угла поворота, где:
а, 6 - выходные сигналы с МРЧЭ-1 и МРЧЭ-2, соответственно, после усиления;
в, г - выходные сигналы с МРЧЭ-3 и МРЧЭ-4, соответственно, после обработки компараторами.
Предлагаемый абсолютный датчик угла поворота устроен следующим образом.
Датчик включает магнитную систему, жестко связанную с вращающимся механизмом. Магнитная система выполнена в виде диска с вмонтированными в него двумя постоянными магнитами (фиг. 3), один -прямоугольной формы 4 с осевой намагниченностью, расположенный в центре диска, другой - дугообразный 5 с радиальной намагниченностью, выполненный в форме дуги полуокружности с центром, совпадающим с центром диска.
Считывающее устройство (фиг. 4), состоит из четырех магниторезистивных чувствительных элементов 6-9, выполненных в виде мостов Уинстона. Первый и второй МРЧЭ 6 и 7 размещены в центре считывающего устройства, имеют общий центр и развернуты под углом 45° относительно друг друга (фиг. 5). Третий МРЧЭ 8 и четвертый МРЧЭ 9 расположены по окружности относительно центра с радиусом, равным радиусу дугообразного магнита (фиг. 4) и противостоят ему. Одна пара противолежащих плеч 10 моста третьего МРЧЭ 8 разнесена от другой пары плеч 11 моста симметрично относительно центра на расстояние диаметра дугообразного магнита (фиг. 4).
Линии, соединяющие первую пару плеч 10 моста третьего МРЧЭ 8, центр первого 6 (или второго 7) МРЧЭ и центр четвертого МРЧЭ 9 образуют один равнобедренный прямоугольный треугольник, а линии, соединяющие вторую пару плеч 11 моста третьего МРЧЭ 8, центр первого 6 (или второго 7) МРЧЭ и центр четвертого МРЧЭ 9 образуют второй равнобедренный прямоугольный треугольник.
Считывающее устройство расположено соосно и с зазором относительно магнитной системы.
Схема обработки состоит из элементов 12-18 (фиг. 8).
Сущность предлагаемого технического решения заключается в том, что в абсолютном датчике угла поворота формируется четыре сигнала (по одному с каждого МРЧЭ). При этом для определения угла поворота, используются сигналы синусоидальной формы с двух магниторезистивных чувствительных элементов 6, 7, расположенных в центре считывающего устройства, зависящие от направления магнитного поля, оси чувствительности которых находятся под углом 45° относительно друг друга и с помощью которых можно однозначно определить угол поворота в диапазоне ±90° через функцию арктангенса. А для устранения неоднозначности за пределами данного диапазона ±90° используются сигналы с третьего МРЧЭ 8 и четвертого МРЧЭ 9, расположенных на расстоянии радиуса дугообразного магнита от центра. Третий МРЧЭ 8 и четвертый МРЧЭ 9 работают в режиме пороговых датчиков и совместно с дугообразным магнитом 5, обеспечивают получение информации в цифровом коде, о том в какой полуокружности (четверти окружности) происходит измерение угла поворота магнитного диска, устраняя тем самым неоднозначность в измерениях. При этом воздействие магнита 5 диска либо на одну пару противолежащих плеч 10, либо на другую 11 третьего МРЧЭ 8 обеспечивает формирование либо активной единицы, либо активного нуля. Четвертый МРЧЭ 9 работает в режиме активной единицы или пассивного нуля.
Работу устройства поясняет схема, приведенная на фиг. 8.
Диск с магнитами приводится в движение валом, при вращении диска магниты 4, 5 воздействуют на магниторезистивные чувствительные элементы 6-9 (фиг. 7). Разностные сигналы с первого и второго МРЧЭ 6 и 7, имеющие синусоидальную форму, поступают на первый каскад предварительного усиления, состоящих из программируемых дифференциальных усилителей 12. Коэффициент усиления каскада устанавливается микроконтроллером 17 при подаче двоичного кода, соответствующего необходимому уровню усиления. Далее сигнал поступает на второй каскад усиления, состоящий из делителя на 2,5 В 15, и программируемого усилителя 13. Делитель 15 смещает среднюю точку сигнала с О В до 2,5 В. С помощью микроконтроллера 11, коэффициент усиления второго каскада выбирается таким образом, чтобы его амплитуда была максимально приближена к диапазону от 0 до 5 В. На выходе второго каскада усиления сигналы с 6 и 7 имеют вид, представленные на фиг. 9 а и фиг. 9 6, соответственно. После усиления, сигнал преобразуется в цифровой вид с помощью АЦП 16 и поступает в микроконтроллер 17 для дальнейшей обработки, а именно, вычисления функции арктангенса.
При прохождении дугообразного магнита 5 над парой плеч 10 МРЧЭ 8 меняется сопротивление в диагонали моста и за счет разбаланса моста появляется выходной сигнал положительного значения, формируя активную единицу, а при прохождении магнита над парой плеч 11 МРЧЭ 8 -отрицательного значения, формирую активный ноль. Аналогичная ситуация происходит при прохождении дугового магнита над элементом 9, только единица будет активной, а ноль пассивным.
Выходные сигналы с МРЧЭ 8 и 9 поступают на компараторы 14, выходные каскады которых настроены на уровень выходного сигнала 3,3 В фиг. 9 в, г (ТТЛ-уровень). Таким образом, формируется двоичная кодировка каждой четверти окружности, в которой происходит определение угла (фиг. 9). Далее, сигнал с компараторов 14 (логические уровни нуля или единицы) поступает в микроконтроллер 17 для дальнейшей обработки.
В микроконтроллере 17 по преобразованным результатам измерений вначале вычисляется угол α в диапазоне ±90° по формуле:

где B7 и B2 - обработанные и преобразованные сигналы с элементов 6 и 7, соответственно.
В зависимости от значений а (или знаков B1 и B2), цифровых сигналов с элементов 8 (B3) и 9 (B4) определяется квадрант, в котором находится угол согласно таблице 1, и происходит его уточнение, тем самым обеспечивая вычисление угла поворота в диапазоне от 0° до 360°. Уточнение угла происходит следующим образом. По значениям B3 и B4 определяется номер k (от 0 до 3), соответствующий квадранту:
k=2⋅B3+B4.
Вектор добавок к углу α имеет вид:
Dob[0÷3]={ 0,π, 2π, π}.
В соответствии со значением и таблицей 1 определяется добавка к значению α.

В связи с тем, что возможно несоответствие вблизи углов 0°, 90°, 180°, 360°, где B1>0.8 (вблизи 0° и 180°) или B1<-0.8 (вблизи 90° и 270°) и где происходит смена значений B3 и B4, перед вычислением полного угла необходимо проверить соответствие значений α значениям B3, B4. Признак такого несоответствия, выражаемый условием:

можно не проверять, поскольку в такое условие входит 11 логических операций, а всегда для значений B1, близких к экстремумам, выполнять следующее:
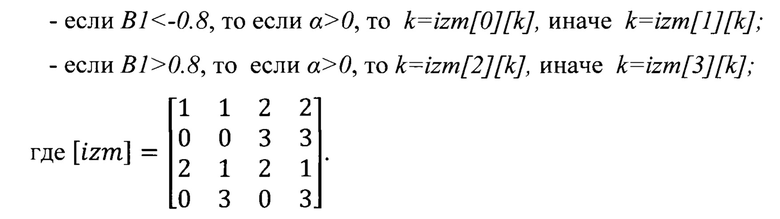
После проверки и возможного изменения значения полный угол вычисляется по формуле:
A=Dob [k]- α.
В результате на выходе через приемо-передатчик 18 выдается сигнал в цифровом коде или аналоговом виде, соответствующий углу поворота (фиг. 9).
Предлагаемый датчик угла надежно работает при воздействии магнитного поля с частотой до 100 кГц. В качестве магнитов диска используются магнитопласты соответствующей формы с индукцией ≥8 мТл, что обеспечивает помехозащищенность. Скорость работы, в конечном счете, будет определяться быстродействием применяемых электрорадиоизделий. Погрешность (с учетом систематической составляющей) определения угла не превысила 0,1°. Разрешающая способность датчика при прочих равных условиях определяется разрядностью и характеристиками АЦП. Для 16-ти разрядного АЦП она составит 0,005°.
Таким образом, осуществляется принцип действия абсолютного датчика - определение положения вала, не только в динамическом случае, но и в статическом положении.
Высокая радиационная стойкость магниторезистивных чувствительных элементов и магнитного диска обеспечивается применяемыми для их изготовления материалами.
Таким образом, предлагаемое техническое решение позволяет создать абсолютный датчик угла поворота на основе анизотропных магниторезистивных сенсоров с малыми размерами, с компенсацией электрических и магнитных помех, обеспечивающий измерение углового положения вращающегося механизма в диапазоне от 0 до 360°, обладающего высокой разрядностью и низкой погрешностью, помехозащищенностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| АБСОЛЮТНЫЙ ДАТЧИК УГЛА ПОВОРОТА | 2010 |
|
RU2436037C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК УГЛА ПОВОРОТА | 2020 |
|
RU2730108C1 |
| Магниторезистивный датчик магнитного поля | 2019 |
|
RU2738998C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2002 |
|
RU2216822C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2001 |
|
RU2185691C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2012 |
|
RU2528116C2 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК ТОКА | 2015 |
|
RU2601281C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2012 |
|
RU2495514C1 |
| Способ балансировки магниторезистивного датчика | 2017 |
|
RU2664868C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОКАЗАТЕЛЯ ЧУВСТВИТЕЛЬНОСТИ МАГНИТОРЕЗИСТИВНЫХ ДАТЧИКОВ | 2014 |
|
RU2553740C1 |

Изобретение относится к измерительной технике и может быть использовано для бесконтактного определения угла поворота и углового положения вала, скорости и направления вращения. В датчике угла поворота магнитная система выполнена в виде диска с вмонтированными в него двумя постоянными магнитами, один - прямоугольной формы с осевой намагниченностью, расположенный в центре диска, другой - дугообразный с радиальной намагниченностью. Считывающее устройство состоит из четырех магниторезистивных чувствительных элементов (МРЧЭ), два из которых размещены в центре считывающего устройства, имеют общий центр и развернуты под углом 45° относительно друг друга, а третий и четвертый расположены по окружности относительно центра с радиусом, равным радиусу дугообразного магнита, причем плечи третьего МРЧЭ разнесены симметрично относительно центра на расстояние диаметра дугообразного магнита, а линии, соединяющие первую пару плеч третьего МРЧЭ, центры первого и четвертого МРЧЭ образуют один равнобедренный прямоугольный треугольник, а линии, соединяющие вторую пару плеч третьего МРЧЭ, центры первого и четвертого МРЧЭ - второй равнобедренный прямоугольный треугольник. Технический результат - увеличение разрядности и уменьшение погрешности датчика, высокая помехозащищенность, повышение технологичности изготовления и быстродействия, упрощение конструкции датчика и схемы обработки сигнала. 9 ил., 1 табл.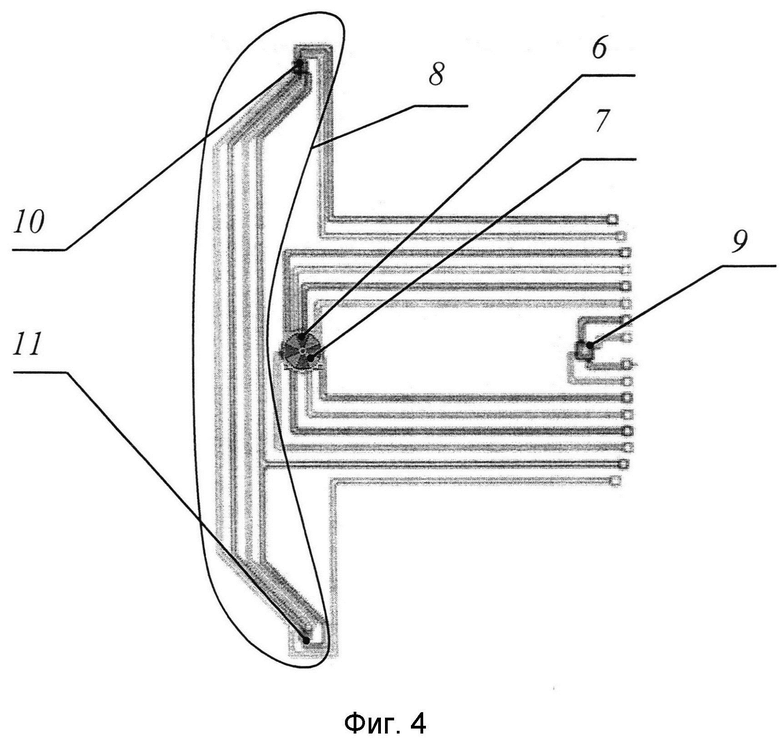
Абсолютный датчик угла поворота, включающий магнитную систему, жестко связанную с вращающимся механизмом, считывающее устройство, состоящее из четырех магниторезистивных чувствительных элементов, выполненных в виде мостов Уинстона, расположенное соосно с зазором относительно магнитной системы, и схему обработки, отличающийся тем, что магнитная система выполнена в виде диска с вмонтированными в него двумя постоянными магнитами, один из которых прямоугольной формы с осевой намагниченностью, расположенный в центре диска, другой - дугообразный с радиальной намагниченностью, выполненный в форме дуги полуокружности с центром, совпадающим с центром диска, два из четырех магниторезистивных чувствительных элементов размещены в центре считывающего устройства, имеют общий центр и развернуты под углом 45° относительно друг друга, а третий и четвертый расположены по окружности относительно центра с радиусом, равным радиусу дугообразного магнита магнитной системы, причем одна пара противолежащих плеч моста третьего чувствительного элемента разнесена от другой симметрично относительно центра на расстояние диаметра дугообразного магнита, причем линии, соединяющие первую пару противолежащих плеч моста третьего чувствительного элемента, центр первого или второго магниторезистивного чувствительного элемента и центр четвертого магниторезистивного чувствительного элемента образуют один равнобедренный прямоугольный треугольник, а линии, соединяющие вторую пару противолежащих плеч моста третьего чувствительного элемента, центр первого или второго магниторезистивного чувствительного элемента и центр четвертого магниторезистивного чувствительного элемента - второй равнобедренный прямоугольный треугольник.
| АБСОЛЮТНЫЙ ДАТЧИК УГЛА ПОВОРОТА | 2010 |
|
RU2436037C1 |
| Преобразователь угла поворота вала в синусно-косинусные сигналы | 1982 |
|
SU1037308A1 |
| DE 19746199 B4, 30.08.2007 | |||
| DE 102016215040 A1, 09.03.2017 | |||
| KR 20020060178 A, 16.07.2002 | |||
| CN 111981965 A, 24.11.2020. | |||

