Изобретение относится к области электроизмерительной техники и может быть использовано для экспресс контроля коррозийного состояния подземных трубопроводов: поиска трасы и точной привязки трубопровода к дневной поверхности, измерения глубины заложения трубопровода, измерения тока, протекающего по трубопроводу, оценки состояния изоляционного покрытия трубопровода и его сопротивления изоляции.
Известен бесконтактный измеритель тока в подземных трубопроводах (см. А.С. №1821785 от 22.11.90 г., опубликованного в БИ №22 от 15.06.93 г.), содержащий три индукционных датчика магнитного поля, жестко связанных между собой и расположенных вдоль прямой, являющейся продолжением радиуса трубопровода. Измерительные датчики разнесены по высоте на расстояние, равное базе, и ориентируются на измерение полного вектора поля. Последовательно с датчиками включены переключатель рода работ, переключатель пределов измерения, избирательный усилитель, детектор и выходной индикатор. В усилитель дополнительно введен плавно изменяемый линейный регулятор усиления, имеющий шкалу. Бесконтактный измеритель тока в подземных трубопроводах является наиболее близким к заявляемому изобретению по своей технической сущности и может быть взят в качестве прототипа к заявляемому изобретению.
Недостаток прототипа заключается в необходимости регулирования пользователем показаний измерителя, что вносит погрешность в результаты измерений глубины и тока, и, как следствие, к неточной оценке состояния изоляционного покрытия трубопровода.
Решаемой технической задачей является создание системы для измерения тока, протекающего по подземному трубопроводу, и определения глубины его залегания с большой точностью.
Достигаемый технический результат - повышение точности измерений.
Технический результат достигается тем, что система бесконтактного измерения тока содержит три индукционных датчика магнитного поля, расположенных в плоскости, перпендикулярной трубопроводу, при этом датчики жестко связаны между собой, расположены вдоль прямой, являющейся продолжением радиуса трубопровода, оси первого и второго соответственно верхнего нижнего датчиков расположены в плоскости, ортогональной трубопроводу, перпендикулярны оси третьего датчика, которая совпадает с радиальной прямой трубопровода, индикатор и последовательно соединенные переключатель рода работы, ступенчатый регулятор усиления и первый избирательный усилитель.
Новым является то, что дополнительно введены устройство управления и обработки, клавиатура, три усилителя предварительных и последовательно соединенные феррозондовый магнитометр, второй избирательный усилитель и усилитель, вход которого соединен с первым входом устройства управления и обработки, второй вход которого соединен с входом второго избирательного усилителя, второй вход которого соединен с первым выходом устройства управления и обработки, третий вход которого соединен с клавиатурой, а четвертый вход - с выходом первого избирательного усилителя, второй выход устройства управления и обработки соединен с входом управления переключателя рода работ, первый, второй и третий входы которого соединены с выходами первого, второго и третьего предварительного усилителя соответственно, входы которых соединены с выводами первого, второго и третьего индукционных датчиков соответственно, третий выход устройства управления и обработки соединен с входом управления ступенчатого регулятора усиления, четвертый выход устройства управления и обработки соединен с входом управления первого избирательного усилителя, причем переключатель рода работ содержит два разностных усилителя и коммутатор, входы которых являются входами переключателя рода работ, а выход коммутатора является выходами переключателя рода работ, а вход управления коммутатора является входом управления переключателя рода работ, при этом направление оси феррозондового магнитометра совпадает с осью первого и второго индукционных датчиков.
Введение в систему бесконтактного измерения тока феррозондового магнитометра, ось которого совпадает с осями первого и второго индукционных датчиков, позволяет измерять токи очень низкой частоты, при которых трубопроводные электрические характеристики коэффициента затухания и распределения тока фактически такие же, как и на постоянном токе.
Использование тока очень низкой частоты позволяет избежать потерь сигнала, которые происходят вследствие емкостной составляющей полного сопротивления трубопровода.
Введение в систему бесконтактного измерения тока устройства управления и обработки позволяет автоматически рассчитывать глубину залегания трубопровода и ток, протекающий по трубопроводу с большой точностью.
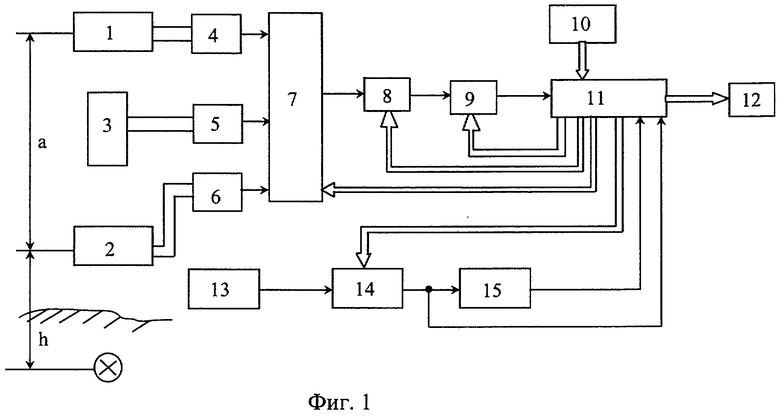
Изобретение поясняется фигурой 1, на которой изображена структурная схема системы бесконтактного измерения тока.
Системы бесконтактного измерения тока содержит:
1-3 - индукционные датчики магнитного поля,
4-6 - усилители предварительные,
7 - переключатель рода работы,
8 - регулятор усиления ступенчатый,
9 - первый избирательный усилитель,
10 - клавиатура,
11 - устройство управления и обработки,
12 - индикатор,
13 - феррозондовый магнитометр,
14 - второй избирательный усилитель,
15 - усилитель,
16-18 - выходы усилителя предварительного: 1, 2, 3 соответственно,
19 - выход переключателя рода работ.
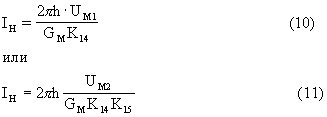
Структурная схема переключателя рода работ изображена на фигуре 2.
Переключатель рода работ содержит разностные усилители 20 и 21 и коммутатор 22, 23 и 24, выходы разностных усилителей 20 и 21 соответственно.
Система работает следующим образом:
Избирательный усилитель 8 настраивается на частоту измеряемого тока (на вторую гармонику сетевого напряжения при контроле работы станции катодной защиты) или на частоту генератора, подключенного выходными клеммами к трубопроводу и заземлению.
При этом значение частоты выбирается с клавиатуры, подключенной к устройству управления и обработки, которое на входе управления первого избирательного усилителя устанавливает код частоты измеряемого сигнала.
Поиск местоположения трубопровода (трассы) производят двумя способами.
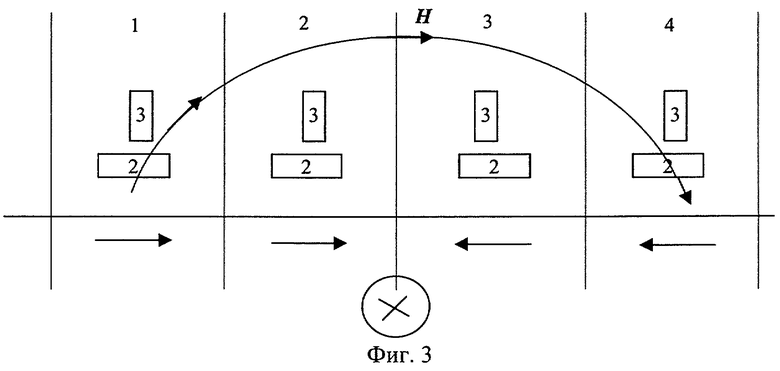
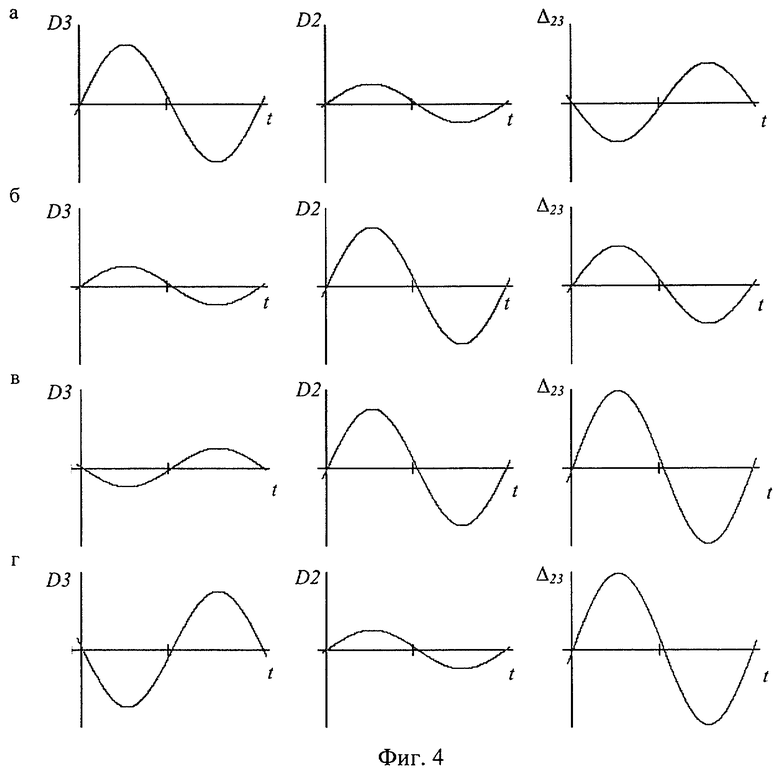
Первый способ поиска (поиск по минимуму) поясняется фигурой 3. На Фигуре 4 а, б, в, г показаны сигналы:
D2 - сигнал на выходе 18 усилителя предварительного 6, подключенного к нижнему датчику 2 (этот сигнал пропорционален горизонтальной составляющей поля);
D3 - сигнал на выходе 17 усилителя предварительного 5, подключенного к вертикальному датчику 3 (этот сигнал пропорционален вертикальной составляющей поля);
Δ23 - сигнал на выходе 24 разностного усилителя 21, который формирует разность сигналов D2 и D3.
При этом датчики 2 и 3 находятся в плоскости, перпендикулярной трубопроводу, а эта плоскость разбита на четыре зоны - в зонах 1 и 4 амплитуда сигнала D3 больше амплитуды сигнала D2, в зонах 2 и 3 - наоборот.
При поиске по минимуму через коммутатор 22 на вход устройства 11 поступают отфильтрованные от помех избирательным усилителем 8 и усиленные усилителем 9 сигналы D2, D3, Δ23 для измерения амплитуд этих сигналов.
И далее выполняется следующий алгоритм:
Если Δ23A<D2A, (при D2A>D3A) или Δ23A<D3A, (при D2A<D3A) то на индикаторе высвечивается стрелка “→”;
если Δ23А>D2A, (при D2A>D3A) или Δ23А>D3A, (при D2A<D3A), то на индикаторе высвечивается стрелка “←”;
при нахождении системы над трубопроводом выполняется условие Δ23A D2A и на индикаторе высвечивается “→←”.
Второй способ поиска местоположения трубопровода (трассы) (поиск по максимуму) осуществляется следующим образом: устройство 11 подключает на выход 19 коммутатора 22 только сигнал с выхода 18 усилителя предварительного 6, подключенного к нижнему датчику 2. При перемещении и повороте системы поперек трассы устройство 11 запоминает максимальное D2M значение сигнала D2. На индикатор выводится шкала, длина которой пропорциональна величине датчика 2 и процент отклонения от значения D2M.
В результате поиска по минимуму и максимуму система располагается над трубопроводом таким образом, что датчики 1 и 2 находятся в плоскости, перпендикулярной трубопроводу, а ось датчика 3 совпадает с радиальной прямой трубопровода.
В этом случае можно производить измерение глубины залегания трубопровода (расстояние от нижнего датчика до оси трубы).
При измерении глубины на выход 19 коммутатора последовательно поступают сигналы:
D1 - сигнал на выходе 16 усилителя предварительного 4, подключенного к верхнему датчику 1;
D12 - сигнал на выходе 23 разностного усилителя 20, который формирует разность сигналов D1 и D2, умноженную на Кр (коэффициент усиления разностного усилителя 20).
На выходе избирательного усилителя 9 также последовательно формируются следующие сигналы:


где а -расстояние между 1 и 2 датчиками;
h - расстояние от нижнего датчика до оси трубопровод (глубина);
G1 и G2 - коэффициенты преобразования датчиков 1 и 2 соответственно (чувствительность),  ;
;
К1 и К12 - коэффициенты усиления, установленные в ступенчатом регуляторе усиления при усилении сигналов D1 и D2 соответственно;
Ку - коэффициент усиления усилителя предварительного;
Кр - коэффициент усиления разностного усилителя 20;
I - ток в трубопроводе.
На основании формул (1) и (2) получаем:

где  ;
;

По формулам (3) и (4) устройство 11 рассчитывает глубину залегания трубопровода h.
При большом сигнале D1 и маленькой глубине усиленная разность D12 получается слишком большой, поэтому в этом случае глубина измеряется при последовательном опросе сигналов D1 и D2, в результате чего на выходе избирательного усилителя последовательно формируются сигналы U1 (см.(1)) и U2:

где K2 - коэффициент усиления, установленный в ступенчатом регуляторе усиления.
На основании формул (1) и (5) получаем:

По формулам (6) и (3) устройство 11 рассчитывает глубину залегания трубопровода в случае большого сигнала D2, и маленькой глубины.
Измерение тока в трубопроводе осуществляется устройством 11 по формуле, выведенной из формулы (1):

При измерении тока очень низкой частоты, который подается в трубопровод от генератора специальных сигналов, устройство 11 измеряет сигнал UMI с выхода усилителя 15 в зависимости от величины этих сигналов:
где НH - сверхнизкочастотная составляющая величина магнитного поля;
IH - ток в трубопроводе сверхнизкой частоты;
Gm - коэффициент преобразования феррозондового магнитометра 13;
K14 - коэффициент усиления избирательного усилителя 14;
К15 - коэффициент усиления усилителя 15.
Т.о. величина сверх низкочастотного тока рассчитывается по формулам:
Феррозондовый магнитометр 13 выполнен по типичной схеме феррозондовых магнитометров для измерения низкочастотных магнитных полей [см. Афанасьев Ю.В. “Феррозондовые магнитометры” - Л.: Энергоатомиздат, Ленинградское отделение, 1986 - 128 с.]. Усилитель 15 выполнен по схеме инвертирующего усилителя и имеет коэффициент усиления 10.
Антенная система, состоящая из 3 индукционных магнитоприемников, выполняется на ферритовых сердечниках, например марки НМ - 700. Измерительные датчики 1 и 2 имеют равное количество витков и желательно обеспечить одинаковые коэффициенты преобразования G1 и G2. Поскольку абсолютно одинаковые коэффициенты получить невозможно, необходимо знать отношение  . При этом точность определения глубины
. При этом точность определения глубины  зависит от относительной точности определения К следующим образом:
зависит от относительной точности определения К следующим образом:
Как видно из формулы (12), чем больше расстояние а между датчиками 1 и 2, тем выше точность при измерении глубины.
Поэтому, по сравнению с прототипом, расстояние между датчиками 1 и 2 увеличено до 550 мм.
В этом случае для 5% точности определения глубины до 9 м необходимо задать К с точностью 0,3%.
Предполагается, что система может работать в диапазоне температур минус 20... плюс 40°С. В таких условиях происходит отклонение К от заданного, что обусловлено температурной нестабильностью магнитной проницаемости феррита марки 700 НМ, она наиболее низкая по сравнению с другими марками и составляет ±5%. Как показано в [Мизюк Л.Я. “Входные преобразователи для измерения напряженности низкочастотных магнитных полей”. - Киев, - 1964, - С.115] нестабильность проницаемости сердечника уменьшается по сравнению с нестабильностью проницаемости материала в μn (где μ - проницаемость материала, N - коэффициент размагничивания сердечника). Коэффициент размагничивания сердечника зависит в основном от отношения  , (где l - длина сердечника, d - диаметр сердечника). Для получения 5% точности измерения глубины, как было показано выше, должно выполняться условие:
, (где l - длина сердечника, d - диаметр сердечника). Для получения 5% точности измерения глубины, как было показано выше, должно выполняться условие:

Т.о. μn>17 или N>0,024, т.к. у феррита марки 700 НМ магнитная проницаемость μ=700.
Для выполнения этого условия отношение  должно быть не больше 10, поэтому, в отличие от прототипа, длина сердечника составляет 100 мм, а диаметр 10 мм.
должно быть не больше 10, поэтому, в отличие от прототипа, длина сердечника составляет 100 мм, а диаметр 10 мм.
При временном уходе К от заданного значения новое значение К можно ввести в устройство управления и обработки с клавиатуры.
Система собрана на микромощных операционных усилителях, обеспечивающих необходимую точность измерений и обладающих низким энергопотреблением, что важно для работы в полевых условиях.
Усилители предварительные 4, 5 и 6 выполнены на базе инструментального усилителя AD620, что обеспечивает большой коэффициент подавления синфазной наводки на выводы датчиков 1,2 и 3.
Разностные усилители 20 и 21 также выполнены на AD620, что обеспечивает высокую точность получения разностных сигналов.
Коммутатор 22 выполнен на ключах ADG433 и ADG409, имеющих очень низкое сопротивление открытого канала и хорошее качество изоляции между каналами, что обеспечивает передачу сигнала на выход коммутатора без искажений.
Ступенчатый регулятор усиления выполнен на базе программируемого усилителя AD526, причем на него поступает предварительно отфильтрованный сигнал, для того чтобы помехи не усиливались. Количество ступеней у регулятора усиления - 9, необходимый коэффициент усиления (1, 2, 4, 8, 16, 64, 128 или 256) задается устройством 11 в зависимости от величины сигнала на его входе.
Избирательные усилители 9 и 14 выполнены по схеме биквадратного активного фильтра, и настраиваются на частоту измеряемого поля. Усилитель 9 может настраиваться на частоту 100 Гц, при использовании станций электрохимзащиты, или на частоту 128 Гц или 640 Гц при использовании генератора специальных сигналов. Усилитель 14 может настраиваться на частоту 4 Гц или 8 Гц. Настройка происходит под управлением устройства 11.
Клавиатура 10 имеет 7 кнопок и с нее можно вводить необходимую информацию в устройство 11 и задавать режимы работы системы.
Устройство 11 выполнено на базе PIC-процессора со встроенным многоканальным АЦП и работает по программе записанной в его память.
Данная система позволяет получить точность определения глубины залегания трубопровода ±5%, при токе, протекающем по трубопроводу не менее - 20 мА, и максимальная глубине залегания трубопровода - 8 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БЕСКОНТАКТНОГО МАГНИТОМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛА ТРУБОПРОВОДА | 2006 |
|
RU2306554C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ТОКА В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2177630C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО МАГНИТОМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛА ТРУБОПРОВОДА | 2011 |
|
RU2460068C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОКА КАТОДНОЙ ЗАЩИТЫ | 2008 |
|
RU2379673C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2015 |
|
RU2610938C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОЧИСТНОГО ПОРШНЯ В ТРУБОПРОВОДЕ | 1995 |
|
RU2123896C1 |
| ЭЛЕКТРОМЕТРИЧЕСКИЙ ПРИБОР ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОКА И ГЛУБИНЫ ЗАЛЕГАНИЯ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2007 |
|
RU2370783C2 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| Устройство для определения расположения магистральных трубопроводов | 1990 |
|
SU1804636A3 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2010 |
|
RU2437113C2 |
Изобретение относится к области электроизмерительной техники и может быть использовано для экспресс контроля коррозийного состояния подземных трубопроводов. Заявлена система бесконтактного измерения тока, содержащая три индукционных датчика магнитного поля, расположенных в плоскости, перпендикулярной трубопроводу. Датчики жестко связны между собой, расположены вдоль прямой, являющейся продолжением радиуса трубопровода. Оси первого и второго, соответственно верхнего и нижнего датчиков, расположены в плоскости, ортогональной трубопроводу, перпендикулярны оси третьего датчика, которая совпадает с радиальной прямой трубопровода. Система также содержит индикатор, переключатель рода работы, ступенчатый регулятор усиления, первый избирательный усилитель, устройство управления и обработки, клавиатуру, три усилителя предварительных, феррозондовый магнитометр, второй избирательный усилитель, усилитель. Технический результат: повышение точности измерений. 4 ил.
Система бесконтактного измерения тока в подземных трубопроводах и определения глубины их залегания, содержащая три индукционных датчика магнитного поля, расположенных в плоскости, перпендикулярной трубопроводу, при этом датчики жестко связаны между собой и расположены вдоль прямой, являющейся продолжением радиуса трубопровода, оси первого и второго соответственно верхнего и нижнего датчиков расположены в плоскости, ортогональной трубопроводу, перпендикулярны оси третьего датчика, которая совпадает с радиальной прямой трубопровода, индикатор и последовательно соединенные переключатель рода работы, ступенчатый регулятор усиления и первый избирательный усилитель, отличающаяся тем, что дополнительно введены устройство управления и обработки, клавиатура, три предварительных усилителя и последовательно соединенные феррозондовый магнитометр, второй избирательный усилитель и усилитель, вход которого соединен с первым входом устройства управления и обработки, второй вход которого соединен с входом второго избирательного усилителя, второй вход которого соединен с первым выходом устройства управления и обработки, третий вход которого соединен с клавиатурой, а четвертый вход - с выходом первого избирательного усилителя, второй выход устройства управления и обработки соединен с входом управления переключателя рода работ, первый, второй и третий входы которого соединены с выходами первого, второго и третьего предварительных усилителей соответственно, входы которых соединены с выводами первого, второго и третьего индукционных датчиков соответственно, третий выход устройства управления и обработки соединен с входом управления ступенчатого регулятора усиления, четвертый выход устройства управления и обработки соединен с входом управления первого избирательного усилителя, причем переключатель рода работ содержит два разностных усилителя и коммутатор, входы которых являются входами переключателя рода работ, а выход коммутатора является выходами переключателя рода работ, а вход управления коммутатора является входом управления переключателя рода работ, при этом направление оси феррозондового магнитометра совпадает с осью первого и второго индукционных датчиков.
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ТОКА В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2177630C1 |
| Устройство для бесконтактного измерения токов в подземных магистральных трубопроводах | 1985 |
|
SU1308905A1 |
| US 4134061 А, 09.01.1979 | |||
| US 4390836 А, 28.06.1983. | |||

