Изобретение относится к области магнитоизмерительной техники, в частности к магнитной навигации и навигационному оборудованию, магниторазведке, магнитному картографированию и т.д., и может быть использовано для совместного построения прецизионных магнитометров с компенсаторами магнитных помех носителей или магнитных навигационных компасов с компенсаторами магнитной девиации.
При магнитных измерениях на подвижном объекте его собственные магнитные помехи определяются выражениями Пуассона [1, с.93], учитывающими влияние мягкого и твердого в магнитном отношении железа. Параметры Пуассона, характеризующие помехи, можно считать постоянными величинами для конкретного фиксированного распределения ферромагнитных масс объекта. Поэтому задачей компенсации помех является построение компенсатора помех, например, в составе магнитометра, реализующего формирование компенсационных поправок, определяемых зависимостью, согласно выражениям Пуассона.
Известны магнитометры с компенсаторами магнитных помех [1, с.119], построенными на применении сумматоров, а также магнитных и знакоформирующих преобразователей, реализованных на основе операционных усилителей, резистивных делителей и коммутаторов. В основу работы подобных компенсаторов положен принцип подачи компенсационных поправок в выходные цепи измерительных каналов магнитометра или принцип формирования компенсационных магнитных полей с помощью специальных электромагнитных катушек. Недостатком подобных компенсаторов является сложность их схемы и невозможность обеспечения миниатюризации магнитометра в целом.
Ощутимым фактором влияния помех на измерения магнитометром составляющих вектора индукции магнитного поля Земли (МПЗ) является характер угловой дезориентации измеряемых компонент. Известными устройствами с компенсацией подобного рода погрешностей являются магнитометры с компенсаторами, содержащими перекрестные цепи формирования компенсационных поправок в виде токов, подаваемых в компенсационные обмотки датчиков магнитного поля. Достоинством подобных схем является отсутствие необходимости применения сложных узлов на операционных масштабных усилителях. Вариантом указанных схем является индукционный компас [2], содержащий два ортогональных феррозонда и усилительно-преобразовательных канала и корректор, выполненный в виде сдвоенного потенциометра, входы каждой секции которого соединены с выходами соответствующих им усилительно-преобразовательных каналов, а выходы подключены перекрестно к обмоткам, размещенным на феррозондах.
Перекрестное формирование с помощью масштабных потенциометров токов, пропорциональных выходным сигналам усилительно-преобразовательных каналов и подаваемых в компенсационные обмотки феррозондов, обеспечивает коррекцию курсового угла изменением его в данном случае на угол магнитного склонения.
Недостатком измерителя МПЗ с подобным устройством компенсации является усложнение схемы, обусловленное необходимостью дополнительного введения специальных компенсационных обмоток в феррозонды, а также ограниченная возможность и сложность формирования знакопеременных компенсационных сигналов. Применение подобного способа построения схемы коррекции угловой погрешности в варианте трехкомпонентного магнитометра с компенсатором помех объекта заметно усложняет прибор в целом, при этом только частично решая задачу устранения влияния помех.
Известен также трехкомпонентный вариант схемы компенсации угловой погрешности в трехкомпонентном датчике магнитного поля [3], используемом для создания трех взаимно перпендикулярных магнитных полей заданной индукции. В данном случае угловая погрешность обусловлена не идеальной ортогональностью осей датчика относительно базовой плоскости. Трехкомпонентный датчик магнитного поля содержит три конструктивно совмещенных однокомпонентных контура с обмотками, оси которых взаимно перпендикулярны, и базовую плоскость, причем каждый контур дополнительно снабжен двумя вспомогательными обмотками, перекрестно соединенными через регулируемые резисторы с шунтами, включенными последовательно в цепь основных обмоток контуров.
Благодаря этому осуществляется электрическая юстировка ортогональности полей, что упрощает конструкцию датчика и обеспечивает независимость регулировки каждой из компонент поля.
Тем не менее, необходимость введения дополнительных вспомогательных обмоток в каждый контур, а также отсутствие возможности формирования знакопеременных компенсационных сигналов усложняют устройство в целом и ограничивают возможность применения указанной схемы для построения схемы компенсации в трехкомпонентном измерителе МПЗ, используемой для компенсации помех объекта.
Возможным вариантом построения навигационного магнитометра на подвижном объекте, используемого в составе навигационной системы для измерения магнитного курса объекта, является магнитометр с компенсатором магнитных помех объекта [4, фиг.2, фиг.4], наиболее близкий по технической сущности к предлагаемому и выбранный в качестве прототипа.
Магнитометр содержит последовательно соединенные индукционный трехкомпонентный датчик с жестко закрепленными феррозондами, оси чувствительности которых ориентированны соответственно вдоль продольной, нормальной и поперечной связанных осей объекта, трехканальный блок усиления и компенсатор помех, содержащий в свою очередь последовательно соединенные стабилизированный источник питания, компенсационную цепь, первый, второй и третий выходы которой подключены соответственно к входам специально введенных компенсационных обмоток соответственно первого, второго и третьего феррозондов индукционного трехкомпонентного датчика.
Индукционным датчиком измеряются сигналы, соответствующие проекциям вектора индукции магнитного поля на связанные оси объекта. Сигналы с индукционного датчика в трехканальном блоке усиления усиливаются и преобразуются в напряжения постоянного тока, пропорциональные измеряемым проекциям. Затем сигналы с выходов трехканального блока усиления поступают на компенсатор помех (девиации), который в соответствии со значениями сигналов на своих входах обеспечивает компенсацию составляющих погрешности, обусловленной магнитным полем объекта. Компенсация осуществляется формированием на трех выходах компенсатора девиации сигналов, пропорциональных составляющим вектора погрешности измерения, поступающих на входы специальных компенсационных обмоток феррозондов индукционного датчика, за счет чего осуществляется дополнительное подмагничивание магнитных зондов токами, пропорциональными соответствующим составляющим вектора погрешности измерения, что позволяет компенсировать данную погрешность.
В данном устройстве последовательность соединения феррозонда и соответствующего усилителя блока усиления представляет собой канал преобразования. Возможным и целесообразным вариантом исполнения каждого канала преобразования является реализация его по автокомпенсационной схеме [5, с.30-35], то есть канала преобразования, охваченного резистивной отрицательной обратной связью с выхода усилителя на вход собственной обмотки компенсации феррозонда.
Достоинством представленного варианта схемы компенсации является высокая разрешающая способность и стабильность формирования знакопеременных компенсационных полей в автоматическом или полуавтоматическом режиме работы.
Структура компенсатора девиации (помех) определяется реализацией зависимостей составляющих погрешности согласно выражениям Пуассона. Принципиально возможными структурами построения схем компенсации помех в данном устройстве являются, например, комбинации схем представленных аналогов [1-3] с присущим им указанным недостатком, то есть сложность схемы, обусловленная необходимостью применения сумматоров и масштабных элементов, реализованных на основе применения операционных усилителей и дополнительных компенсационных обмоток в феррозондах или индуктивных катушек, усложняющих микроминиатюризацию навигационного магнитометра.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является упрощение схемы и конструкции, а также уменьшение габаритов навигационного магнитометра.
Предлагаемое техническое решение представляет собой два варианта навигационного магнитометра, образующих единый общий изобретательский замысел.
Указанный результат достигается тем, что в предлагаемом навигационном магнитометре (по первому варианту), содержащем три ортогонально ориентированных феррозонда, оси чувствительности которых ориентированны соответственно вдоль продольной, нормальной и поперечной связанных осей объекта, компенсатор помех и три усилителя, вход каждого из которых подключен к выходу измерительной обмотки соответствующего феррозонда, а выход подключен к соответствующему входу компенсатора помех и через сопротивление обратной связи - ко входу компенсационной обмотки соответствующего феррозонда, в каждом феррозонде компенсационная и измерительная обмотки включены дифференциально по постоянному току, компенсатор помех содержит три масштабных блока, с первого по третий входы которых подключены соответственно к первому, второму и третьему входам компенсатора помех, а четвертый вход каждого масштабного блока подключен к выходу источника стабилизированного напряжения, каждый масштабный блок содержит с первой по четвертую масштабные цепи последовательного соединения переменного сопротивления и коммутатора, причем первые выходы коммутаторов с первого по третий масштабных блоков подключены к входам компенсационных обмоток соответственно первого, второго и третьего феррозондов, а вторые выходы - к выходам измерительных обмоток соответственно первого, второго и третьего феррозондов.
В предлагаемом навигационном магнитометре (по второму варианту), содержащем три ортогонально ориентированных феррозонда, оси чувствительности которых ориентированны соответственно вдоль продольной, нормальной и поперечной связанных осей объекта, компенсатор помех и три усилителя, вход каждого из которых подключен к выходу измерительной обмотки соответствующего феррозонда, а выход подключен к соответствующему входу компенсатора помех и через сопротивление обратной связи - к входу компенсационной обмотки соответствующего феррозонда, в каждом феррозонде компенсационная и измерительная обмотки включены дифференциально по постоянному току, компенсатор помех содержит три масштабных блока, с первого по третий входы которых подключены соответственно к первому, второму и третьему входам компенсатора помех, а четвертый вход каждого масштабного блока подключен к источнику стабилизированного напряжения, каждый масштабный блок содержит с первой по четвертую масштабные цепи последовательного соединения сопротивления и потенциометра, причем первые выводы с первого по четвертый сопротивления каждого масштабного блока подключены соответственно к его первому по четвертый входам, а вторые выводы - к первому (среднему) выводу соответственно первого по четвертый потенциометров, вторые выводы потенциометров с первого по третий масштабных блоков подключены ко входам компенсационных обмоток соответственно первого, второго и третьего феррозондов, а третьи выводы - к выходам измерительных обмоток соответствующих феррозондов.
Сущность предлагаемого изобретения поясняется графическими материалами. На фиг.1 изображена структурная схема навигационного магнитометра по первому варианту. На фиг.2 изображена структурная схема навигационного магнитометра по второму варианту.
Предлагаемый навигационный магнитометр по первому (см. фиг.1) и второму (см. фиг.2) вариантам содержит три ортогонально ориентированных феррозонда 1, 2, 3, оси чувствительности которых ориентированы соответственно вдоль продольной, нормальной и поперечной связанных осей объекта, компенсатор помех 4 и три усилителя 5, 6, 7, вход каждого из которых подключен к выходу измерительной обмотки 8 соответствующего феррозонда, а выход подключен к соответствующему входу компенсатора помех 4 и через сопротивление обратной связи 10, 11, 12 - ко входу компенсационной обмотки 9 соответствующего феррозонда 1, 2, 3, в каждом феррозонде компенсационная 9 и измерительная 8 обмотки включены дифференциально по постоянному току, компенсатор помех 4 содержит три масштабных блока 13, 14, 15, с первого по третий входы которых подключены соответственно к первому, второму и третьему входам компенсатора помех, а четвертые входы каждого масштабного блока 13, 14, 15 подключены к выходу источника стабилизированного напряжения (U0), по первому варианту (фиг.1) каждый масштабный блок 13, 14, 15 содержит с первой по четвертую масштабные цепи последовательного соединения переменного сопротивления 16-19 и коммутатора 20-23, причем первые выходы коммутаторов 20-23 с первого 13 по третий 15 масштабных блоков подключены ко входам компенсационных обмоток 9 соответственно первого 1, второго 2 и третьего 3 феррозондов, а вторые выходы - к выходам измерительных обмоток 8 соответственно первого 1, второго 2 и третьего 3 феррозондов, по второму варианту (фиг.2) каждый масштабный блок 13-15 содержит с первой по четвертую масштабные цепи последовательного соединения сопротивления 16-19 и потенциометра 20-23, причем первые выводы с первого 16 по четвертый 19 сопротивления каждого масштабного блока 13-15 подключены соответственно к его первому по четвертый входам, а вторые выводы - к первому (среднему) выводу соответственно первого 20 по четвертый 23 потенциометров, вторые выводы потенциометров 20-23 с первого 13 по третий 15 масштабных блоков подключены ко входам компенсационных обмоток соответственно первого 1, второго 2 и третьего 3 феррозондов, а третьи выводы - к выходам измерительных обмоток соответствующих феррозондов.
Работа устройства осуществляется следующим образом.
Феррозондами 1, 2, 3 измеряются сигналы, соответствующие проекциям вектора индукции магнитного поля на связанные оси объекта. Выходные сигналы феррозондов с выходов измерительных обмоток 8 выделяются частотно-избирательным фильтром, усиливаются по переменному току и преобразуются в напряжения постоянного тока в соответствующих феррозондам 1, 2, 3 усилителях 5, 6, 7 и затем через соответствующие им сопротивления обратной связи 10, 11, 12, преобразуясь в ток, подаются на входы компенсационных обмоток 9 соответствующих феррозондов 1, 2, 3. То есть в объеме каждого феррозонда 1, 2, 3 осуществляется автоматическая компенсация (автокомпенсация) измеряемого поля током компенсационной обмотки 9. Таким образом, в данном устройстве измерение проекций вектора индукции магнитного поля осуществляется ферромодуляционными преобразователями автокомпенсационного типа [5].
Компоненты вектора магнитной индукции по соответствующим осям объекта OX, OY, OZ определяются выражениями

где Bx, By, Вr - составляющие вектора суммарной индукции МПЗ и объекта, Вxи, Вyи, Bzи - измеряемые составляющие вектора индукции МПЗ, а ΔВх, ΔВу, ΔBz - составляющие вектора магнитной индукции помехи, определяемые выражениями Пуассона [1, с.93]
где a, b, c, d, e, g, h, k - коэффициенты Пуассона, характеризующие влияние магнитомягкого, в магнитном отношении, железа, а Р, Q, R - составляющие магнитной индукции по осям объекта, вызванной постоянной намагниченностью, то есть компоненты вектора магнитной индукции от намагничивания твердого железа объекта. В предлагаемом магнитометре компенсация помех осуществляется формированием компенсационных сигналов ΔВхк, ΔВук, ΔВzк в объемах соответствующих им феррозондов 1, 2, 3 путем подачи на входы феррозондов токов, формируемых устройством компенсации 4. То есть результатом компенсации является минимизированная алгебраическая разность помехи и компенсационного сигнала, следовательно, условием компенсации помех выражений (1) является осуществление требований

Формирование компенсационных токов и подача их в обмотки 8, 9 феррозондов 1, 2, 3 осуществляются соответственно масштабными блоками 13, 14, 15. В дифференциально включенных обмотках 8, 9 магнитные поля, создаваемые выходными электрическими токами масштабных блоков 13, 14, 15, протекающими через обмотки 8, 9, направлены встречно. В каждом масштабном блоке осуществляется формирование и масштабное преобразование модулей и формирование знаков компенсационных токов. Процесс формирования компенсационных сигналов в объеме каждого феррозонда представим в виде следующих функций преобразования, реализуемых компенсатором помех 4 согласно выражениям (2), (3)
где mа, mb, mс, mP - масштабные коэффициенты, формируемые масштабным блоком 13 и также определяемые коэффициентом преобразования соответствующей обмотки (постоянной обмотки) феррозонда 1, a md, me, mf, mQ и mg, mh, mk, mR - масштабные коэффициенты, формируемые соответственно масштабными блоками 14, 15 и задаваемые постоянной обмотки феррозондов 2, 3.
Предполагая равенство всех коэффициентов преобразования (К) автокомпенсационных преобразователей магнитометра (то есть основных всех трех каналов преобразования магнитометра), подставим в выражения (4) равенства
Ux=KBxи, Uy=KByи, Uz=KBzи.
Далее, согласно (3) из условия равенства выражений (2) и (4) получим
В предлагаемом устройстве по первому варианту модули масштабных коэффициентов устанавливаются при регулировке с помощью переменных сопротивлений 16-19 в каждом масштабном блоке 13, 14, 15. При этом знаки масштабных коэффициентов формируются подключением с помощью соответствующего коммутатора регулируемой масштабной цепи к соответствующему выводу дифференциально включенных обмоток, то есть к выходу измерительной обмотки 8 или ко входу компенсационной обмотки 9. Так, например, формирование первого слагаемого (ΔВхка) компенсационного сигнала ΔВхк выражения (4) можно представить в виде

В данном случае компенсационный ток задается регулируемым сопротивлением 16, то есть R16, в масштабном блоке 13 и коэффициентом преобразования (Собм) одной из обмоток 8, 9 в феррозонде 1. При подключении с помощью коммутатора 20 второго вывода сопротивления 16 к компенсационной обмотке 9 с коэффициентом преобразования Ск в объеме феррозонда 1 наводится индукция определенной полярности, например отрицательной
при подключении вывода сопротивления 16 к выходу измерительной обмотки с коэффициентом преобразования Си в объеме феррозонда 1 наводится индукция противоположной полярности
При обеспечении равенства коэффициентов преобразования обмоток 8, 9 Си=Cк=Собм с учетом выражений масштабного коэффициента mа в формулах (5), (6) получим
Подставляя в полученную формулу выражение коэффициента преобразования автокомпенсационного магнитометрического преобразователя [6]

имеем
где R10 - сопротивление обратной связи 10.
Аналогичным образом можно получить выражения для остальных
масштабных сопротивлений 17, 18, 19 масштабного блока 13, то есть
и соответственно для масштабных блоков 14 и 15 имеем

В предлагаемом устройстве предполагается равенство соответствующих параметров феррозондов 1, 2, 3 и равенство R10=R11=R12.
В предлагаемом устройстве по второму варианту масштабные коэффициенты устанавливаются при регулировке в каждом масштабном блоке 13, 14, 15 с помощью потенциометров 20-23. При равенстве коэффициентов преобразования измерительной 8 и компенсационной 9 обмоток (Си=Ск) модуль и знак компенсационных токов в объеме феррозондов 1, 2, 3 задаются в соответствующих масштабных блоках 13, 14, 15 положением подвижных контактов потенциометров 20-23 относительно их среднего положения, то есть задаются соответственно абсолютной величиной и знаком разности выходных токов потенциометров, подаваемых на вход компенсационной 9 и выход измерительной 8 обмоток. Следовательно, в среднем положении подвижных контактов потенциометров формируются нулевые значения компенсационных полей. Сопротивлениями 16-19 задается диапазон регулировки токов, а следовательно, и диапазон регулировки масштабных коэффициентов. Особенностью данного варианта предлагаемого устройства является возможность одновременной выставки модуля и знака масштабных коэффициентов перемещением движка потенциометров 20-23.
Предлагаемые варианты технического решения обеспечивают возможность полуавтоматического и автоматического режимов компенсации помех, вызванных влиянием мягкого и твердого в магнитном отношении железа. В первом режиме осуществляется выставка вручную масштабных коэффициентов по известным значениям параметров Пуассона. Во втором случае, например, в варианте применения навигационного магнитометра в системе для измерения магнитного курса [5], обеспечивается возможность автоматического управления установкой масштабных коэффициентов реализацией переменных регулировочных резисторов в виде цифроуправляемых сопротивлений.
Простота схемного решения, обусловленная простотой схемы компенсатора помех 4, отсутствием необходимости использования для формирования компенсационных токов дополнительных компенсационных обмоток или индуктивных катушек и использованием однополярного источника стабилизированного напряжения для формирования знакопеременных компенсационных токов, позволяет осуществление миниатюризации предлагаемого устройства, а также, кроме основного назначения, обеспечивает возможность использования предложенной схемы компенсации помех в качестве компенсатора инструментальных погрешностей магнитометра, расширяя тем самым функциональные возможности технического решения.
Таким образом, предлагаемое устройство, обладая новизной, полезностью и реализуемостью, обеспечивает возможность повышения точности измерения компонент вектора индукции МПЗ на подвижном объекте.
Литература
1. Л.А.Кардашинский - Брауде. Современные судовые магнитные компасы. - СПб: ФГУП "ГНЦ - ЦНИИ «Электроприбор»", 1999. - 138 с.
2. Авторское свидетельство СССР №287327 от 30.12.1968, МПК G01C 17/26, «Индукционный компас».
3. Авторское свидетельство СССР №312216 от 06.04.1970, МПК G01R 33/02, «Трехкомпонентный датчик магнитного поля».
4. Скородумов С.А., Обоишев Ю.П. Помехоустойчивая измерительная аппаратура. - Л.: Энергоиздат. Ленингр. отд-ние, 1981. - 176 с., ил.
5. Семенов Н.М., Яковлев Н.И. Цифровые феррозондовые магнитометры. Л.: Энергия, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| Устройство для компенсации помехВ ОбРАзцОВыХ MEPAX МАгНиТНОй иНдуКции | 1979 |
|
SU813338A1 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2302615C1 |
| МОНОБЛОЧНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382376C1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382375C1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2380718C1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2006 |
|
RU2316781C1 |
| МАГНИТНАЯ ВАРИАЦИОННАЯ СТАНЦИЯ | 1991 |
|
RU2008702C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
Изобретение относится к магнитоизмерительной технике и навигационному приборостроению. Технический результат - миниатюризация навигационного магнитометра при обеспечении высокой точности измерения компонент вектора индукции магнитного поля Земли на борту подвижного объекта. Указанный результат достигается тем, что навигационный магнитометр, содержащий три ортогонально ориентированных феррозонда, оси чувствительности которых совмещены с соответствующими осями объекта, три усилителя, подключенные выходами через сопротивления обратной связи к компенсационным обмоткам, а входами - к выходам измерительных обмоток соответствующих феррозондов, и подключенный к выходам усилителей компенсатор помех, отличается тем, что измерительная и компенсационная обмотки каждого феррозонда соединены дифференциально по постоянному току и подключены к выходам соответствующих феррозондам масштабных блоков компенсатора помех, по первому варианту выполненных в виде цепей последовательного соединения переменного сопротивления и коммутатора, а по второму варианту - в виде цепей последовательного соединения сопротивления и потенциометра. 2 н.п. ф-лы, 2 ил.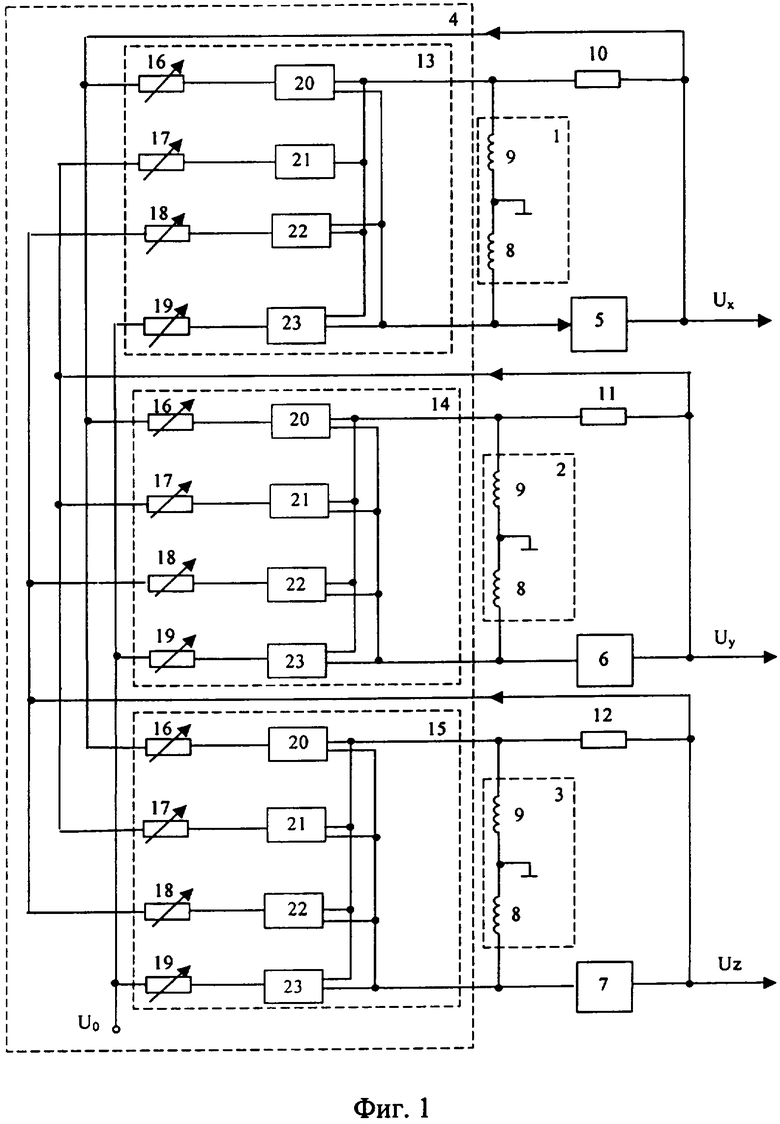
1. Навигационный магнитометр, содержащий три ортогонально ориентированных феррозонда, оси чувствительности которых ориентированы соответственно вдоль продольной, нормальной и поперечной связанных осей объекта, компенсатор помех и три усилителя, вход каждого из которых подключен к выходу измерительной обмотки соответствующего феррозонда, а выход подключен к соответствующему входу компенсатора помех и через сопротивление обратной связи - ко входу компенсационной обмотки соответствующего феррозонда, отличающийся тем, что в каждом феррозонде компенсационная и измерительная обмотки включены дифференциально по постоянному току, компенсатор помех содержит три масштабных блока, с первого по третий входы которых подключены соответственно к первому, второму и третьему входам компенсатора помех, а четвертый вход каждого масштабного блока подключен к выходу источника стабилизированного напряжения, каждый масштабный блок содержит с первой по четвертую масштабные цепи последовательного соединения переменного сопротивления и коммутатора, причем первые выходы коммутаторов с первого по третий масштабных блоков подключены ко входам компенсационных обмоток соответственно первого, второго и третьего феррозондов, а вторые выходы - к выходам измерительных обмоток соответственно первого, второго и третьего феррозондов.
2. Навигационный магнитометр, содержащий три ортогонально ориентированных феррозонда, оси чувствительности которых ориентированны соответственно вдоль продольной, нормальной и поперечной связанных осей объекта, компенсатор помех и три усилителя, вход каждого из которых подключен к выходу измерительной обмотки соответствующего феррозонда, а выход подключен к соответствующему входу компенсатора помех и через сопротивление обратной связи - ко входу компенсационной обмотки соответствующего феррозонда, отличающийся тем, что в каждом феррозонде компенсационная и измерительная обмотки включены дифференциально по постоянному току, компенсатор помех содержит три масштабных блока, с первого по третий входы которых подключены соответственно к первому, второму и третьему входам компенсатора помех, а четвертый вход каждого масштабного блока подключен к выходу источника стабилизированного напряжения, каждый масштабный блок содержит с первой по четвертую масштабные цепи последовательного соединения сопротивления и потенциометра, причем первые выводы с первого по четвертый сопротивления каждого масштабного блока подключены соответственно к его первому по четвертый входам, а вторые выводы - к первому (среднему) выводу соответствующего первого по четвертый потенциометров, вторые выводы потенциометров с первого по третий масштабных блоков подключены ко входам компенсационных обмоток соответственно первого, второго и третьего феррозондов, а третьи выводы - к выходам измерительных обмоток соответствующих феррозондов.
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР СО СЛЕДЯЩИМ УРАВНОВЕШИВАНИЕМ | 1985 |
|
SU1318069A1 |
| Магнитометр | 1979 |
|
SU838618A1 |
| ТРЕХКОМПОНЕНТНЫЙ ДАТЧИК МАГНИТНОГО ПОЛЯ | 0 |
|
SU312216A1 |
| WO 9117452 A1, 14.11.1991 | |||
| Способ изготовления деревянных заготовок для дек музыкальных инструментов | 1983 |
|
SU1234875A1 |

