Изобретение относится к области контрольно-измерительной техники и может быть использовано для определения скоростей движения в десятки нанометров в секунду.
Известен способ определения параметров движения объекта с зеркальной поверхностью, заключающийся в том, что эту поверхность облучают лазерным лучом, направленным по оси, которая вместе с направлением движения объекта лежит в плоскости, перпендикулярной вертикальной плоскости, одновременно с целью расширения числа измеряемых параметров и их уточнения вводится второй дополнительный луч лазера, направленный по оси, которая вместе с направлением движения объекта лежит в плоскости, перпендикулярной плоскости первого луча, одновременно с 2-х экранов с помощью фотокамер производится запись осциллограмм, описываемых после отражения от зеркальной поверхности двумя лучами лазера, лежащими во взаимно перпендикулярных плоскостях, по осциллограммам определяют параметры движения объекта (см. патент РФ №2147727 по кл. МПК G 01 P 3/36).
Однако данный способ позволяет измерять скорость движения объектов только с зеркальной поверхностью, обладает сложной технической реализацией и ограниченным диапазоном величин измеряемых скоростей.
Также известен способ лазерного измерения вектора скорости, заключающийся в том, что в исследуемую область направляются лазерные лучи, формирующие зондирующие поля с заданными векторами чувствительности, выделяют световые пучки, рассеянные в зондирующем поле, выполняют фотоэлектрическое преобразование выделенных пучков, селектируют электрические сигналы с частотами, соответствующие проекциям вектора скорости на заданные вектора чувствительности, измеряют частоты селектированных электрических сигналов и трансформируют измеренные частоты в значения соответствующих компонент вектора скорости посредством известных линейных преобразований, определяемых пространственной конфигурацией векторов чувствительности зондирующих полей, измеряют взаимно ортогональные компоненты вектора скорости путем попарного вычитания и суммирования частот электрических сигналов, соответствующих проекциям вектора скорости на векторе чувствительности в выбранной паре, причем модули этих векторов чувствительности задают равными между собой (см. патент РФ №2108585 по кл. МПК G 01 P 3/36).
Однако данный способ требует сложной технической реализации и обладает низкой точностью измерений.
Наиболее близким к предлагаемому изобретению является способ измерения скорости движения объекта, включающий в себя облучение движущегося объекта лазерным излучением, направление отраженного от объекта излучения в резонатор лазера, регистрацию изменения мощности лазерного излучения внешним фотодетектором, разложение зарегистрированного автодинного сигнала на спектральные компоненты и определение скорости движения объекта по разностной (Доплеровской) частоте между собственной частотой генерации лазерного излучателя и частотой отраженного от движущегося объекта излучения. (H.W. Jentink, F.F.M de Mul, J.G. Aarnoudse, and J Greve Small laser Doppler velocimeter based on the self-mixing effect in a diode laser//Applied Optics, 1988. Vol.27. No.2. p.379-385).
Однако данный способ имеет ограниченный диапазон измеряемых скоростей.
Задача настоящего способа заключается в расширении диапазона измеряемых скоростей и повышении точности измерений при упрощении технической реализации проведения измерений.
Поставленная задача достигается тем, что способ определения скоростей движения включает облучение объекта лазерным излучением, направление его обратно в резонатор лазера, регистрацию внешним фотодетектором автодинного сигнала по изменению мощности лазерного излучения, разложение зарегистрированного сигнала на спектральные компоненты, перед регистрацией лазерного излучения внешним фотодетектором объект или/и лазер подвергают вибрационному воздействию с заданной частотой и амплитудой, большей половины длины волны лазерного излучения, выделяют из зарегистрированного сигнала участок длительностью не менее чем величина, обратная заданной частоте, после разложения зарегистрированного сигнала на спектральные компоненты рассчитывают фазу автодинного сигнала по набору спектральных компонент, повторяют эту процедуру на следующем участке сигнала, по полученной зависимости фазы автодинного сигнала от времени рассчитывают скорость движения объекта.
Оригинальность предлагаемого решения заключается в использовании новой методики калибровки автодинного сигнала, которая реализуется путем возбуждения в измеряемом объекте дополнительных колебаний с амплитудой, превышающей половину длины волны лазерного излучения. Подобная совокупность действий определения скорости движения объекта не известна. Предлагаемый способ поясняется чертежами:
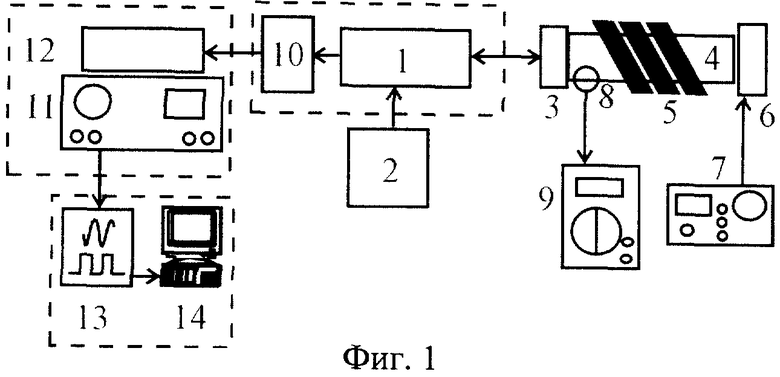
Фиг.1. Схема измерительной системы: 1 - полупроводниковый лазер, 2 - источник тока, 3 - отражатель, 4 - исследуемый объект, 5 - нагревательный элемент, 6 - пьезокерамика, 7 - генератор звуковых колебаний, 8 - термопара, 9 - вольтметр, 10 - фотодетектор, 11 - усилитель, 12 - фильтр переменного сигнала, 13 - аналого-цифровой преобразователь, 14 - компьютер.
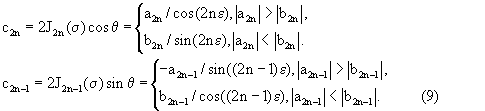
Фиг.2. Вид продетектированного фотоприемником сигнала, полученного при отражении излучения от линейно движущегося, гармонически колеблющегося объекта.
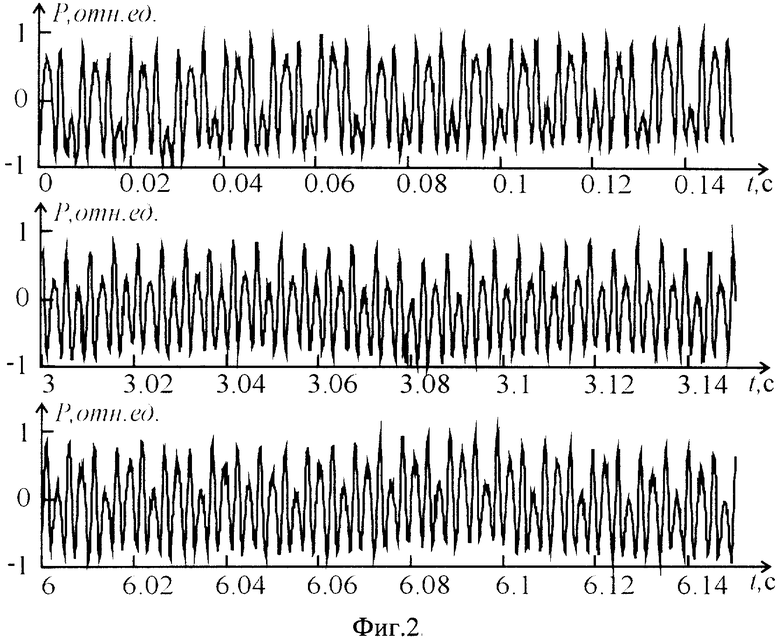
Фиг.3. Участок сигнала длиной в пять периодов продольных колебаний объекта.
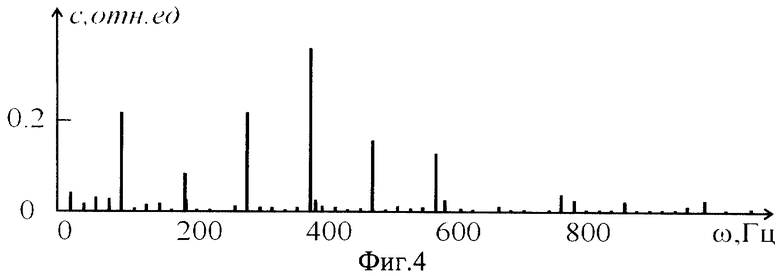
Фиг.4. Спектр участка сигнала длиной в 5 периодов колебаний объекта.
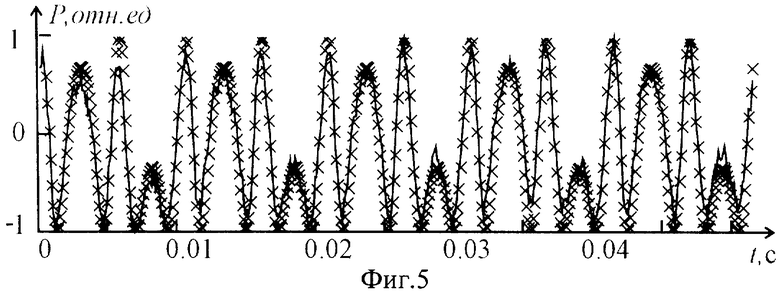
Фиг.5. Вид восстановленного участка сигнала (---) длиной в 5 периодов колебаний объекта в сравнении с экспериментальным (× × × ).
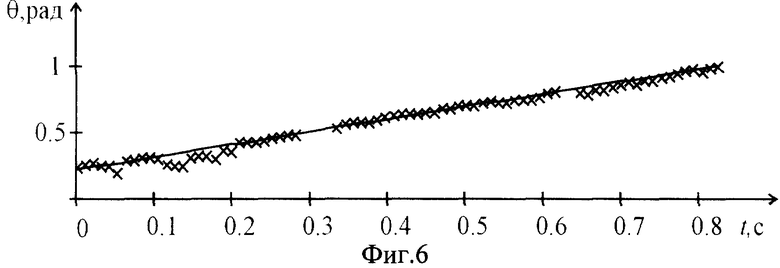
Фиг.6. Зависимость изменения набега фазы автодинного сигнала со временем, полученная при оконной обработке сигнала, приведенного на фиг.2.
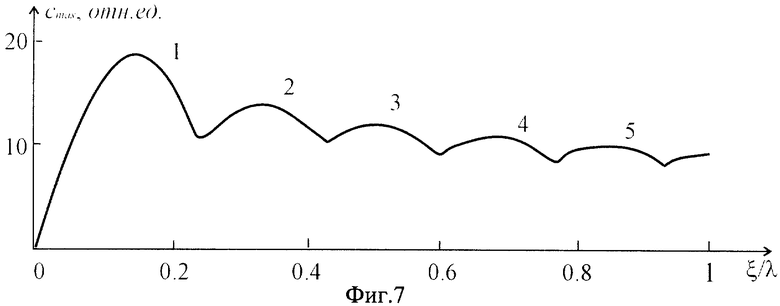
Фиг.7. Теоретическая зависимость максимального спектрального значения амплитуды гармоники от амплитуды колебаний объекта, номера на графике указывают на номер максимальной гармоники в спектре.
Способ заключается в следующем.
На измеряемый объект направляют когерентное излучение от источника света 1 (фиг.1) измерительной системы, преобразуют отраженное от объекта излучение в электрический сигнал, например с помощью фотоприемника 10. На фиг.2 приведена форма сигнала для линейно движущегося и одновременно гармонически колеблющегося объекта. Предварительно обрабатывают электрический сигнал с помощью фильтра переменного сигнала 12, усилителя 11 и аналого-цифрового преобразователя 13 и записывают его в компьютер 14 в виде файла.
Далее полученный сигнал (фиг.2) разделяют на отдельные участки, длительность которых выбирают кратной периоду продольных колебаний объекта, но настолько малой, чтобы перемещением исследуемого объекта, за время, соответствующее выбранной длине отрезка, можно было пренебречь. Один из таких участков приведен на фиг.3, длина этого участка соответствует пяти периодам продольных колебаний объекта.
Для каждого из полученных таким образом отрезков сигнала рассчитываются параметры продольных колебаний объекта (амплитуда ξ ,, частота колебаний Ω ), фазу сигнала s в начальной точке окна и набег фазы автодинного сигнала θ .
Для расчета вышеупомянутых величин используют следующие теоретические предпосылки.
Переменная нормированная составляющая автодинного сигнала при уровне внешней оптической обратной связи, значительно меньшем единицы, записывается в виде (Усанов Д.А., Скрипаль А.В. Измерение микро- и нановибраций в объектах биомедицины//Изв. Вузов. Электроника. 2003. №2. С.84-90.):

где τ (t) - время обхода лазерным излучением расстояния L до внешнего отражателя,ω 0 - резонансная частота собственного резонатора лазерного диода без обратной связи. При движении внешнего отражателя время обхода лазерным излучением внешнего резонатора изменяется по закону

где ϑ (τ ) - скорость движения отражателя, L0 - длина внешнего резонатора в момент времени t=0.
Если добавить к поступательному движению отражателя гармоническое колебание на высокой частоте вида:

где ξ , и Ω - амплитуда и частота колебаний внешнего отражателя лазерного излучения, ε - начальная фаза. Тогда время обхода излучением внешнего резонатора запишется в виде:

где τ 0 - время обхода лазерным излучением внешнего резонатора с медленно движущимся отражателем, τ a=2ξ /c - амплитудное значение гармонического колебания внешнего отражателя.
С учетом (4) соотношение (1) для нормированной переменной составляющей автодинного сигнала запишется в виде:

где θ (t)=ω 0·τ 0(t) - набег фазы автодинного сигнала, f(t)=σ sin(ω t+ε ) - функция, характеризующая продольные колебательные движения объекта,

λ - длина волны лазерного излучения.
Соотношение (5) описывает форму сигнала при наличии у внешнего отражателя одновременно поступательного движения со скоростью ϑ (t) и продольных колебаний вида (3). Для анализа участка сигнала длиной, как упоминалось выше, настолько малой, что поступательным перемещением отражателя за время, соответствующее длине участка, можно пренебречь, можно использовать соотношение

где набег фазы автодинного сигнала θ не зависит от времени, вследствие предположения о пренебрежении поступательным перемещением отражателя за время, соответствующее длине участка, что соответствует равенству нулю скорости в выражении (2), a L0 тогда будет соответствовать длине внешнего резонатора в момент времени, соответствующий начальной точке участка.
Функцию P(t) представим в виде разложения в ряд по функциям Бесселя (см. Усанов Д.А., Скрипаль А.В., Вагарин В.А., Васильев М.Р. Оптические гомодинные методы измерений//Зарубежная радиоэлектроника. 1995. N6. С.43-48.):
Как видно из выражения (4), интерференционная компонента сигнала состоит из постоянной компоненты cosθ · J0(σ ), гармоники на основной частоте и составляющих на более высоких гармониках основной частоты.
Также представим функцию P(t) в виде разложения в ряд Фурье

где аn и bn - коэффициенты разложения в ряд Фурье.
Сопоставив (6) и (7), вводим коэффициенты с2n-1 и с2n следующим образом:
где значение ε - фаза сигнала в начальной точке участка, которая находится из уравнений:

Использовав рекуррентную связь для функций Бесселя, получим соотношение для вычисления амплитуды продольных колебаний объекта:

и для фазы автодинного сигнала:

где θ - набег фазы автодинного сигнала, номер соответствует номеру младшей спектральной составляющей сигнала в выражении (12).
Для повышения точности определения параметров автодинного сигнала расчет можно проводить по различным наборам спектральных составляющих.
Для определения точности вычисления параметров автодинного сигнала строится восстановленный автодинный сигнал в соответствии с выражением (6) и рассчитывается его среднеквадратическое отклонение от теоретического.
Процедуру определения параметров автодинного сигнала производят для каждого из участков сигнала. Таким образом, получается зависимость фазы автодинного сигнала от времени, приведенная на фиг.6, за момент времени, соответствующий данному значению набега фазы автодинного сигнала, выбирается момент времени, соответствующий положению средней точки отрезка, из которого было получено значение набега фазы автодинного сигнала, в общем сигнале. Необходимо отметить, что отрезки сигнала могут и перекрываться между собой.
Значение скорости движения внешнего отражателя рассчитывается из полученной зависимости набега фазы автодинного сигнала от времени с использованием соотношения

Скорость теплового расширения объекта, вычисленная по зависимости изменения набега фазы автодинного сигнала от времени, приведенной на фиг.6, с использованием соотношения (13), составила 50 нм/с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ НАНОПЕРЕМЕЩЕНИЙ | 2017 |
|
RU2658112C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ НАНОВИБРАЦИЙ ПО СПЕКТРУ ЧАСТОТНОМОДУЛИРОВАННОГО ПОЛУПРОВОДНИКОВОГО ЛАЗЕРНОГО АВТОДИНА | 2013 |
|
RU2520945C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ ВИБРАЦИИ ПО ДВУМ ГАРМОНИКАМ СПЕКТРА АВТОДИННОГО СИГНАЛА | 2005 |
|
RU2300085C1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДЫ КОЛЕБАНИЙ БАРАБАННОЙ ПЕРЕПОНКИ | 2004 |
|
RU2258462C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ НАНОВИБРАЦИЙ ПО СИГНАЛУ ЛАЗЕРНОГО АВТОДИНА | 2012 |
|
RU2507487C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА | 2016 |
|
RU2629651C1 |
| СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ ПРИ МИКРО- И НАНОСМЕЩЕНИЯХ | 2010 |
|
RU2420746C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПУЛЬСОВОЙ ВОЛНЫ ДИСТАНЦИОННЫМ МЕТОДОМ | 2013 |
|
RU2562446C2 |
| СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОГО РАССТОЯНИЯ | 2020 |
|
RU2738876C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 2011 |
|
RU2471406C2 |
Изобретение относится к области контрольно-измерительной техники и может быть использовано для определения скоростей движения в десятки нанометров в секунду. Способ включает облучение объекта лазерным излучением, направление его обратно в резонатор лазера, регистрацию внешним фотодетектором автодинного сигнала по изменению мощности лазерного излучения и разложение зарегистрированного сигнала на спектральные компоненты. При этом перед регистрацией лазерного излучения внешним фотодетектором объект или/и лазер подвергают вибрационному воздействию с заданной частотой и амплитудой, большей половины длины волны лазерного излучения, выделяют из зарегистрированного сигнала участок длительностью не менее чем величина, обратная заданной частоте, после разложения зарегистрированного сигнала на спектральные компоненты рассчитывают фазу автодинного сигнала по набору спектральных компонент, повторяют эту процедуру на следующем участке сигнала, по полученной зависимости фазы автодинного сигнала от времени рассчитывают скорость движения объекта. Техническим результатом является расширение диапазона измеряемых скоростей и повышение точности измерений при упрощении технической реализации проведения измерений. 7 ил.
Способ измерения скорости движения объекта, включающий облучение объекта лазерным излучением, направление отраженного от объекта излучения в резонатор лазера, регистрацию изменения мощности лазерного излучения внешним фотодетектором, разложение зарегистрированного автодинного сигнала на спектральные компоненты и определение по ним скорости движения объекта, отличающийся тем, что до регистрации автодинного сигнала объект или/и лазер подвергают вибрационному воздействию с заданной частотой и амплитудой большей половины длины волны лазерного излучения, выделяют из зарегистрированного сигнала участок длительностью не менее чем величина, обратная заданной частоте, после разложения зарегистрированного сигнала на спектральные компоненты рассчитывают фазу автодинного сигнала по набору спектральных компонент, повторяют эту процедуру на следующем участке сигнала, по полученной зависимости фазы автодинного сигнала от времени рассчитывают скорость движения объекта.
| H.W | |||
| JENTINK et al | |||
| Small laser Doppler velocimeter based on the selfmixing effect in a diode laser | |||
| Applied Optics | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Дальномер | 1922 |
|
SU379A1 |
| US 5825465 А, 20.10.1998 | |||
| US 6323943 В1, 27.11.2001 | |||
| УСАНОВ Д.А | |||
| и др | |||
| Определение амплитуды колебаний оптическим гомодинным методом по высшим гармоникам | |||
| ПТЭ | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
| СПОСОБ ЛАЗЕРНОГО ИЗМЕРЕНИЯ ВЕКТОРА СКОРОСТИ | 1995 |
|
RU2108585C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147727C1 |

