Изобретение относится к области электромеханики и может быть использовано в системах точного позиционирования, для линейного и вращательно перемещения различных объектов и устройств в нанотехнологическом оборудовании и прецизионном приборостроении.
Известен инерционный способ пошагового перемещения, в котором для организации движения используется инертная масса самого перемещаемого объекта. В пьезоустройствах, реализующих этот способ перемещения, на пьезоэлемент подается асимметричное (пилообразное) напряжение и перемещаемый объект (каретка, столик с размещенными на них предметами) смещается во время плавной фазы пилы на расстояние до нескольких микрометров в соответствии с деформацией пьезоэлемента, а во время быстрой фазы пилы практически остается на месте благодаря своей инертной массе.
Известно устройство перемещения, в работе которого используется данный способ, содержащее основание, трубчатый пьезоэлемент, один конец которого закреплен на основании, а другой снабжен опорой и пружиной, прижимающий перемещаемый столик с расположенными на нем предметами к опоре (см. патент РФ №2257645, кл. МПК H01L 41/09, публ. 27.07.2005 г.).
Известно устройство, содержащее основание, каретку, движитель, выполненный из двух пластин, соединенных между собой упругими шарнирами, причем к одной из пластин прикреплена перемещаемая каретка, а другая пластина прижата к основанию и фрикционно взаимодействует с ним, между пластинами расположен пьезоэлемент, соединенный одним концом с краем одной пластины, а другим - с противоположным краем другой пластины (см. патент РФ на ПМ №87572, кл. МПК H01L 41/00, публ. 10.10.2009 г.).
Недостатком известных технических решений является небольшая величина развиваемого ими тягового усилия и ее зависимость от массы перемещаемых объектов. Стабильность работы устройств в пошаговом режиме обычно достигается только при величинах минимального шага не меньше десятых долей микрометра. Еще одним существенным недостатком подобных конструкций является производимый при их работе шум, т.к. обычно они работают на частотах, не превышающих нескольких килогерц, т.е. в диапазоне звуковых частот (это обусловлено низкими собственными частотами устройства во время плавной фазы подаваемого на пьезоэлемент пилообразного напряжения, когда пьезоэлемент перемещает инертную массу).
Известен способ перемещения, часто называемый «перехватом», при котором на соединяющий опоры пьезоэлемент подается напряжение, а опоры попеременно, согласованно с деформацией пьезоэлемента, фиксируются прижимами. При фиксации одной из опор другая перемещается деформирующимся пьезоэлементом, затем порядок фиксации опор меняется и возвращающийся к своим прежним размерам пьезоэлемент перемещает ранее неподвижную опору (см. патент РФ №2065245, кл. МПК H02N 2/02, публ. 10.08.1996 г. - прототип).
Известно устройство перемещения (при функционировании которого реализуется указанный способ), содержащее основной пьезоэлемент, на концах которого закреплены опоры, каждая из которых прижата к неподвижному основанию с помощью пьезоэлемента с наконечником и упругого элемента (см. патент РФ №2065245, кл. МПК H02N 2/02, публ. 10.08.1996 г. - прототип).
Недостатком устройств этого типа является их сложность, связанная с обязательным присутствием в их конструкциях регулируемых прижимных узлов, попеременно меняющих величину силы прижима опор к основанию по строго определенным правилам, в соответствии с деформацией основного пьезоэлемента. К тому же, каким бы способом не осуществлялся регулируемый прижим - с помощью дополнительных пьезоэлементов (как в прототипе), или с помощью электромагнитов, или с использованием электростатического взаимодействия основания и опор - во всех случаях требуется тщательная обработка поверхностей основания и опор. Еще одним недостатком подобных устройств является вибрация в направлении, перпендикулярном перемещению (в направлении действия переменных прижимных сил).
Целью предлагаемого способа является упрощение конструкций и уменьшение габаритных размеров устройств перемещения, повышение их рабочих частот, снижение уровня шума.
Указанная цель достигается тем, что в известном способе реализации пошагового перемещения относительно друг друга основания и пьезоустройства, включающего пьезоэлемент с опорами на его концах, основанном на создании сил прижима опор к основанию и подаче на пьезоэлемент напряжения, согласно изобретению между противоположными опорами и основанием создают отличные друг от друга силы трения, при этом для прижима опор к основанию используют неизменяющиеся во время процесса перемещения силы прижима, а напряжение на пьезоэлемент подают асимметричное.
Кроме того, различие сил трения между противоположными опорами и основанием создают использованием для контактирующих поверхностей материалов с различными фрикционными свойствами и/или прижатием противоположных опор разными по величине силами прижима, а в качестве сил прижима используют вес элементов конструкции, расположенной на опорах, и/или вес самих опор.
Предлагаемый способ перемещения реализован в устройстве пошагового перемещения, включающем основание, пьезоэлемент, по крайней мере, с двумя опорами на его концах, прижимные элементы, осуществляющие прижим опор к основанию, в котором, согласно изобретению, пьезоэлемент соединен с источником пилообразного напряжения, прижимные элементы выполнены в виде прижимов постоянного усилия, а прижатие опор противоположных концов пьезоэлемента к основанию выполнено с различными максимумами трения покоя их по основанию.
Кроме того, к опорам посредством упругих элементов прикреплена перемещаемая каретка, а упругие элементы, соединяющие опоры и каретку, выполнены в виде пружин или упругих шарниров.
Причем прижимные элементы выполнены в виде пружин или магнитов, расположенных на опорах или каретке, или основании, или же основание и опоры или части каретки выполнены в виде разноименно заряженных электродов для осуществления постоянного прижима опор к основанию электростатическим притяжением, или прижимные элементы выполнены в виде каретки или опор, а прижим опор к основанию осуществляется весом перемещаемой каретки и/или весом самих опор.
Кроме того, контактирующие поверхности основания и опор выполнены симметрично криволинейными в плоскости, перпендикулярной перемещению, а в основании выполнена направляющая профилированная канавка, к которой прижаты опоры, имеющие подобный профиль и контактирующие своими поверхностями с поверхностью канавки, или в опорах выполнены соосные профилированные направляющие канавки, прижатые к основанию, имеющему подобный профиль, и контактирующие своими поверхностями с поверхностью основания.
Схемы вариантов устройства, работающего предлагаемым способом перемещения, представлены на фиг.1-10, где:
1 - основание;
2 - пьезоустройство;
3 - пьезоэлемент;
4 - первая опора;
5 - вторая опора;
6 - каретка;
7 - плоская пружина;
8 - упругий шарнир;
9 - магнит;
10 - спиральная пружина;
11 - наконечник;
12 - плоская прижимная пружина;
13 - стойка;
14 - изолирующая прокладка;
15 - электрод;
F1 - постоянная сила прижима первой опоры к основанию;
F2 - постоянная сила прижима второй опоры к основанию.
На фиг.1 представлена конструкция устройства, состоящего из основания 1, на котором расположено пьезоустройство 2, содержащее пьезоэлемент 3, на концах которого жестко закреплены опоры 4 и 5. Опоры 4 и 5 прижаты к основанию 1 постоянными, неизменяемыми за время перемещения силами прижима F1 и F2 соответственно (прижимные элементы на рисунке не показаны). Максимальное трение покоя опоры 4 по основанию 1 больше максимального трения покоя опоры 5 по основанию 1, это осуществлено за счет того, что F1>F2 при равных коэффициентах трения опор по основанию (в других вариантах устройства отличие максимального трения покоя по основанию у противоположных опор достигается и иными путями, посредством подбора поверхностей основания и опор с различными коэффициентами трения друг по другу и варьирования прижимающих опоры сил). Рассмотрение случая, когда максимальное трение покоя опоры 5 по основанию 1 больше максимального трения покоя опоры 4 по основанию 1, полностью аналогично.
Устройство работает следующим образом. При подаче на пьезоэлемент 3 пилообразного напряжения во время медленной (плавной) фазы пилы пьезоэлемент 3 начинает деформироваться, сжиматься (для случая его расширения рассмотрение абсолютно аналогичное), при этом на обе опоры 4 и 5 действуют силы со стороны пьезоэлемента 3. На какой-то стадии деформации пьезоэлемента 3 они превышают максимальную силу трения покоя между опорой 5 и основанием, в результате чего опора 5 смещается по основанию 1 влево, а опора 4 остается на месте. Во время следующей, быстрой фазы пилы, пьезоэлемент 3 резко удлиняется, возвращаясь к своим первоначальным размерам, при этом с его стороны на опоры действуют силы, превышающие как максимальную силу трения покоя между опорой 5 и основанием 1, так и максимальную силу трения покоя между опорой 4 и основанием 1. При этом опора 4 смещается влево, а опора 5 - вправо (но на меньшее расстояние, чем ее смещение влево на медленной фазе пилы). Т.е. в результате подачи на пьезоэлемент 3 полного периода пилообразного напряжения, все пьезоустройство 2 смещается влево. Во время следующего пилообразного импульса процесс перемещения повторится.
Перемещение устройства вправо осуществляется двумя путями, в зависимости от способа подачи напряжения на пьезоэлемент. В случае подачи биполярного напряжения порядок медленной и быстрых фаз аналогичен, меняется только полярность подаваемого напряжения (при этом пьезоэлемент медленно удлиняется на первой фазе и быстро сжимается во второй). В случае подачи на пьезоэлемент однополярного напряжения для перемещения вправо изменяется порядок следования фаз: пьезоэлемент резко сжимается на первой, быстрой фазе, и медленно удлиняется на второй.
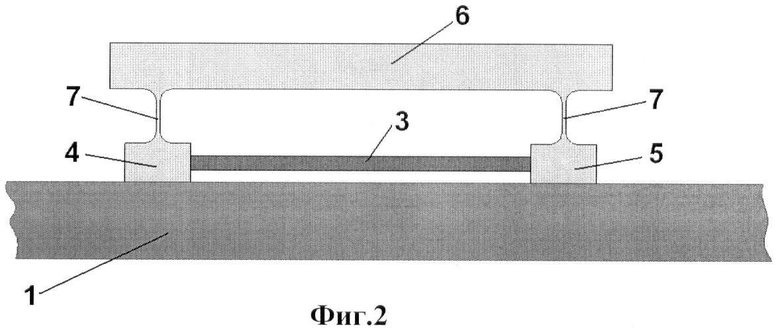
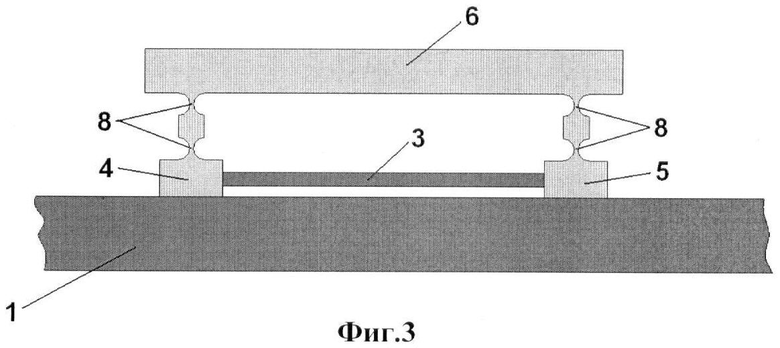
На фиг.2 и фиг.3 приведены варианты устройств, в которых к опорам 4 и 5 посредством упругих элементов прикреплена перемещаемая каретка 6. На фиг.2 крепление каретки 6 к опорам 4 и 5 произведено плоскими пружинами 7, а на фиг.3 каретка 6 и опоры 4 и 5 соединены упругими шарнирами 8. Данные конструкции позволяют перемещать различные объемные и массивные предметы, располагая их на каретке 6, и при этом использовать опоры 4 и 5 с малой массой, что имеет существенное значение для повышения частоты следования шагов и работы устройства на частотах за порогом слышимости.
Неизменность величин сил прижима опор к основанию в процессе перемещения реализуется различными способами. Наиболее простыми и технологичными из них являются варианты с упругими прижимами на плоских и спиральных пружинах, а также варианты с прижимами на постоянных магнитах и электромагнитах с постоянным усилием прижима.
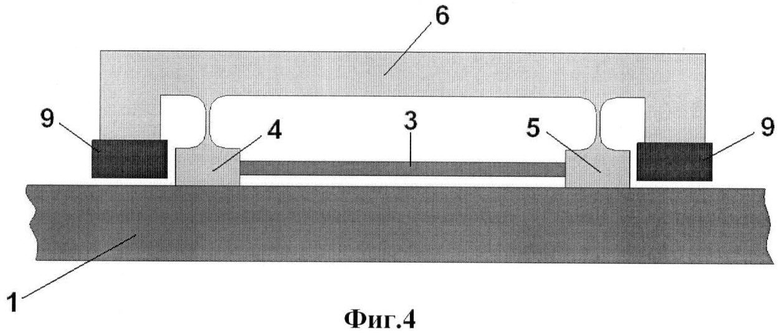
В варианте на фиг.4 прижим опор 4 и 5 к основанию 1 произведен с помощью магнитов 9, расположенных на каретке 6 и притягивающих ее к основанию 1. При этом само основание 1 (или его часть) выполнено из обладающего магнитными свойствами материала.
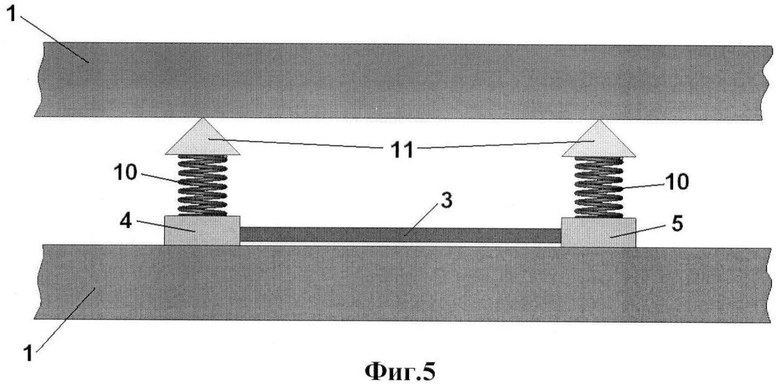
В устройстве на фиг.5 опоры 4 и 5 прижаты к основанию 1 с помощью спиральных пружин 10, одним концом прикрепленных к опорам 4 и 5, а другим, посредством наконечников 11 (фрикционных элементов или подшипников), скользящих по верхней части основания 1, внутренняя поверхность которой параллельна поверхности нижней части основания 1.
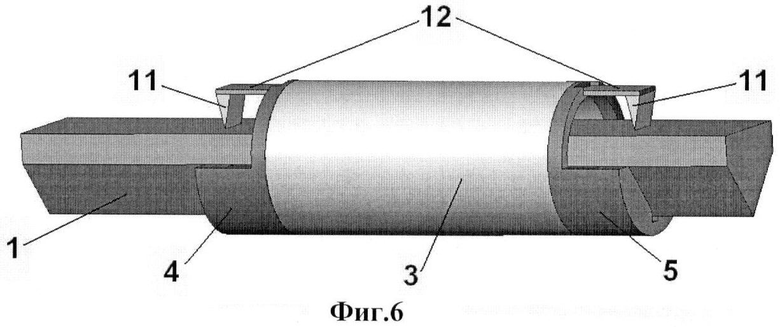
В варианте на фиг.6 приведено устройство, в котором основание 1 проходит сквозь трубчатый пьезоэлемент 3, на концах которого закреплены опоры 4 и 5 с проделанными в них направляющими V- образными канавками. Основание 1 своими двумя гранями прижато к граням канавок прижимами, выполненными в виде плоских пружин 12 с наконечниками 11. Пружины 12 закреплены на опорах 4 и 5.
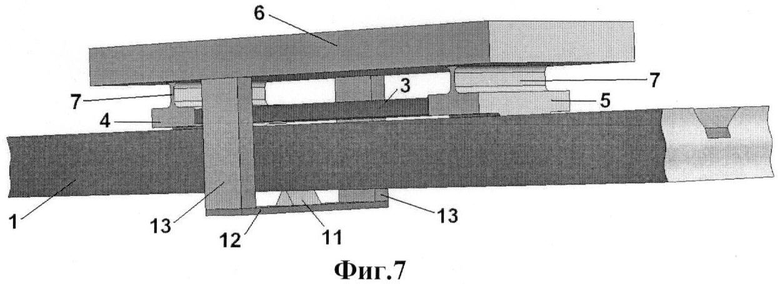
На фиг.7 приведен вариант устройства, в котором прижим опор 4 и 5 к основанию 1 произведен прикрепленной стойками 13 к каретке 6 плоской пружиной 12 с наконечником 11. В основании 1 проделана V-образная направляющая канавка, к граням которой прижаты грани опор 4 и 5. В этом варианте коэффициенты трения опор 4 и 5 по основанию 1 выбраны одинаковыми, а отличие между максимальным трением покоя опоры 4 по основанию 1 и максимальным трением покоя опоры 5 по основанию 1 достигнуто асимметричным расположением прижима по отношению к опорам 4 и 5.
Прижимные элементы могут располагаться и на самом основании.
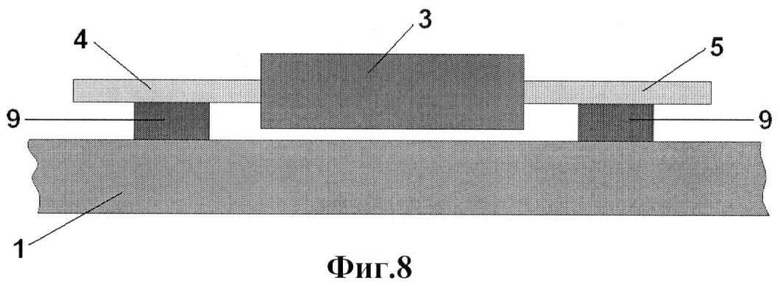
В варианте на фиг.8 прижим опор 4 и 5 к основанию 1 осуществлен с помощью расположенных на основании магнитов 9, а сами опоры 4 и 5 выполнены из обладающих магнитными свойствами материалов.
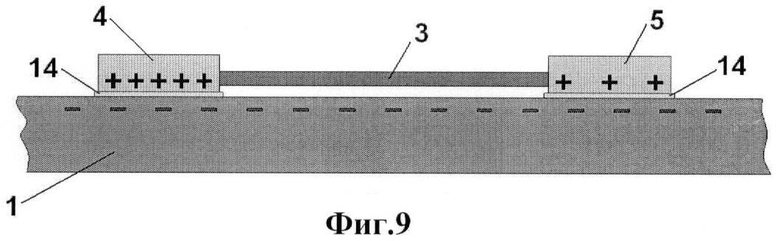
Постоянный прижим опор к основанию возможно осуществить и электростатическими силами, создав между опорами и основанием постоянную разность потенциалов, при этом опоры и основание будут разноименно заряженными электродами.
В варианте, приведенном на фиг.9, опоры 4 и 5 заряжены положительно, а основание 1 отрицательно, между опорами 4, 5 и основанием 1 находятся закрепленные на опорах изолирующие прокладки 14. В этом варианте отличие сил трения опор 4 и 5 по основанию 1 достигнуто созданием на опорах 4 и 5 разных потенциалов.
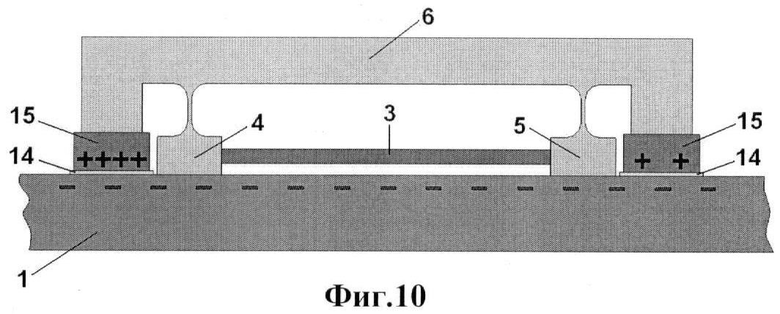
Электростатический прижим опор к основанию можно осуществить и другим образом, прижимая не сами опоры, а расположенную на них каретку. На фиг.10 показан вариант устройства, в котором части каретки 6 выполнены в виде электродов 15, на которых закреплены изолирующие прокладки 14. При этом трение каретки 6 по основанию 1 значительно меньше, чем трение по основанию каждой из опор 4 или 5.
В некоторых случаях для прижима опор к основанию можно воспользоваться только их весом и весом кареток, к ним прикрепленных. Такие варианты имеют практическую ценность только для осуществления перемещений в горизонтальной плоскости или под небольшими углами к горизонту, при этом опоры или каретки должны иметь достаточную массу для того, чтобы трение между опорами и основанием было больше воздействующих на конструкцию паразитных сил, например упругости проводов, соединяющих пьезоэлемент с источником напряжения.
Контактирующие поверхности основания и опор могут нести и направляющие функции, с этой целью их выполняют симметрично криволинейными в плоскости, перпендикулярной перемещению. Например, в устройствах на фиг.1, фиг.2 они плоские.
Направляющие функции поверхностей основания и опор будут наиболее выражены, если в основании сделать направляющую канавку, к которой прижать опоры, имеющие подобный профиль и контактирующие своими поверхностями с поверхностью канавки. На фиг.7 приведено устройство, в котором в основании 1 выполнена V-образная направляющая канавка, к которой прижаты опоры 4 и 5, своими двумя гранями контактирующие с гранями канавки.
В варианте устройства на фиг.6 направляющие профилированные V-образные канавки выполнены в опорах 4 и 5.
Диапазон перемещения в большинстве приведенных вариантов устройств ограничивается только линейными размерами основания (в случаях, когда прижимы расположены на опорах или прикрепленной к ним каретке). Частота следования шагов регулируется от единичных шагов до сравнимой с собственными частотами используемого пьезоэлемента (т.к. массы опор можно выбрать меньшими, чем масса самого пьезоэлемента, или сравнимыми с ней).
Таким образом, использование предлагаемого изобретения позволит упростить конструкции пьезоустройств перемещения, уменьшить их габаритные размеры, а за счет повышения рабочих частот сделать бесшумными.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОУСТРОЙСТВО ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ | 2012 |
|
RU2516258C1 |
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД (ВАРИАНТЫ) | 2012 |
|
RU2490752C1 |
| СПОСОБ КРЕПЛЕНИЯ ПЬЕЗОЭЛЕМЕНТА В ИНЕРЦИОННОМ ПЬЕЗОЭЛЕКТРИЧЕСКОМ ДВИГАТЕЛЕ И ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2015 |
|
RU2587984C1 |
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С СОСТАВНОЙ ОПОРОЙ | 2016 |
|
RU2635341C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ УЛЬТРАЗВУКОВОЙ ДВИГАТЕЛЬ | 2009 |
|
RU2411630C1 |
| ПЬЕЗОДВИГАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2377703C1 |
| ПЬЕЗОКЕРАМИЧЕСКИЙ ЗАЖИМ | 1992 |
|
RU2040107C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 1990 |
|
RU2050037C1 |
| УСТРОЙСТВО МАНИПУЛИРОВАНИЯ | 2014 |
|
RU2591871C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ МАШИНА ТРЕНИЯ (ВАРИАНТЫ) | 2015 |
|
RU2624992C2 |
Изобретение относится к электротехнике и может быть использовано в системах точного позиционирования, для линейного и вращательно перемещения различных объектов и устройств в нанотехнологическом оборудовании и прецизионном приборостроении. Технический результат состоит в упрощении конструкции и уменьшении габаритных размеров, повышении их рабочих частот, снижении уровня шума. В способе реализации пошагового перемещения относительно друг друга основания и пьезоустройства, включающего пьезоэлемент с опорами на его концах, основанном на создании сил прижима опор к основанию и подаче на пьезоэлемент напряжения, согласно изобретению, между противоположными опорами и основанием создают отличные друг от друга силы трения. Для прижима опор к основанию используют не изменяющиеся во время процесса перемещения силы прижима. Напряжение на пьезоэлемент подают асимметричное. Различие сил трения между противоположными опорами и основанием создают использованием для контактирующих поверхностей материалов с различными фрикционными свойствами и/или прижатием противоположных опор разными по величине силами прижима. В качестве сил прижима используют вес элементов конструкции, расположенной на опорах и/или вес самих опор. 3 н. и 12 з.п. ф-лы, 10 ил.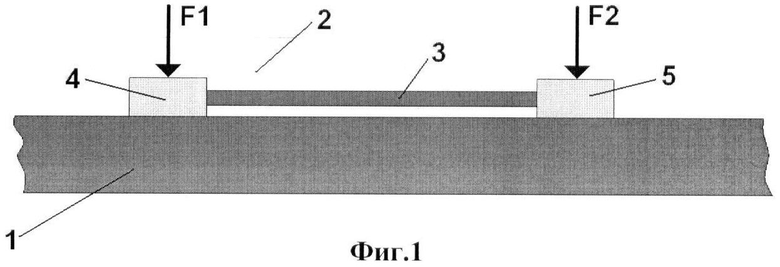
1. Способ реализации пошагового перемещения относительно друг друга основания и пьезоустройства, включающего пьезоэлемент с опорами на его концах, основанный на создании сил прижима опор к основанию и подаче на пьезоэлемент напряжения, отличающийся тем, что между противоположными опорами и основанием создают отличные друг от друга силы трения, при этом для прижима опор к основанию используют неизменяющиеся во время процесса перемещения силы прижима, а напряжение на пьезоэлемент подают асимметричное.
2. Способ по п.1, отличающийся тем, что различие сил трения между противоположными опорами и основанием создают использованием для контактирующих поверхностей материалов с различными фрикционными свойствами и/или прижатием противоположных опор разными по величине силами прижима.
3. Способ по любому из пп.1 и 2, отличающийся тем, что в качестве сил прижима используют вес элементов конструкции, расположенной на опорах и/или вес самих опор.
4. Устройство пошагового перемещения, включающее основание, пьезоэлемент, по крайней мере, с двумя с опорами на его концах, прижимные элементы, осуществляющие прижим опор к основанию, отличающееся тем, что пьезоэлемент соединен с источником пилообразного напряжения, прижимные элементы выполнены в виде прижимов постоянного усилия, а прижатие опор противоположных концов пьезоэлемента к основанию выполнено с различными максимумами трения покоя их по основанию.
5. Устройство пошагового перемещения, включающее основание, пьезоэлемент, по крайней мере, с двумя опорами на его концах, прижимные элементы, осуществляющие прижим опор к основанию, отличающееся тем, что пьезоэлемент соединен с источником пилообразного напряжения, прижимные элементы выполнены в виде прижимов постоянного усилия, а прижатие опор противоположных концов пьезоэлемента к основанию выполнено с различными максимумами трения покоя их по основанию, кроме того, к опорам посредством упругих элементов прикреплена перемещаемая каретка.
6. Устройство по п.5, отличающееся тем, что упругие элементы, соединяющие опоры и каретку, выполнены в виде пружин или упругих шарниров.
7. Устройство по п.4, отличающееся тем, что прижимные элементы выполнены в виде пружин или магнитов, расположенных на опорах или основании.
8. Устройство по п.5, отличающееся тем, что прижимные элементы выполнены в виде пружин или магнитов, расположенных на опорах, или каретке, или основании.
9. Устройство по п.4, отличающееся тем, что основание и опоры выполнены в виде разноименно заряженных электродов для осуществления постоянного прижима опор к основанию электростатическим притяжением.
10. Устройство по п.5, отличающееся тем, что основание и опоры или части каретки выполнены в виде разноименно заряженных электродов для осуществления постоянного прижима опор к основанию электростатическим притяжением.
11. Устройство по п.4, отличающееся тем, что прижимные элементы выполнены в виде опор, а прижим опор к основанию осуществляется весом самих опор.
12. Устройство по п.5, отличающееся тем, что прижимные элементы выполнены в виде каретки или опор, а прижим опор к основанию осуществляется весом перемещаемой каретки и/или весом самих опор.
13. Устройство по п.4 или 5, отличающееся тем, что контактирующие поверхности основания и опор выполнены симметрично криволинейными в плоскости, перпендикулярной перемещению.
14. Устройство по п.4 или 5, отличающееся тем, что в основании выполнена направляющая профилированная канавка, к которой прижаты опоры, имеющие подобный профиль и контактирующие своими поверхностями с поверхностью канавки.
15. Устройство по п.4 или 5, отличающееся тем, что в опорах выполнены соосные профилированные направляющие канавки, прижатые к основанию, имеющему подобный профиль и контактирующие своими поверхностями с поверхностью основания.
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2065245C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2257645C1 |
| Механизм для разгрузки на ходу вагонеток маятниковых канатных дорог | 1949 |
|
SU87572A1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2291551C2 |
| Плавучая установка для сбора нефти с поверхности воды | 1946 |
|
SU69351A1 |
| US 4422002 А, 20.12.1983 | |||
| US 4798989 А, 17.01.1989 | |||
| US 3952215 А, 20.04.1976. | |||

