Устройство относится к области научного приборостроения и предназначено для использования в сканирующих зондовых микроскопах и нанотехнологических установках для микроперемещений образца.
Известно устройство микроперемещений объекта, представляющее собой пьезотрубку со сплошным и разделенными электродами на наружной и внутренней поверхностях [Патент US 6215121, G01N 13/16, 2001]. Достоинство устройства - высокая точность перемещений, недостаток - ограниченный диапазон перемещений.
Известно устройство [Патент РФ № 2190920, МПК H02N 2/04, H01L 41/04. Прецизионный пьезоэлектрический привод/ Ананян М.А., Лускинович П.Н.], содержащее перемещаемое тело, средство для приложения к нему усилия вдоль его продольной оси, пьезоэлектрический зажим, взаимодействующий с поверхностью перемещаемого тела, и средства прижима тела к зажиму, а также источник управляющих сигналов. Недостаток устройства - невысокие надежность и точность, обусловленные необходимостью высокоточной механической обработки и сборки (особенно пьезоэлектрического прижима вследствие небольшой величины его перемещения).
Наиболее близким к заявляемому является устройство [Патент РФ № 2205474, МПК 7 H01L 41/09. Устройство микроперемещений / Липанов A.M., Гуляев П.В., Шелковников Е.Ю. и др.], содержащее основание, в котором закреплен один конец пьезотрубки, другой конец которой снабжен державкой и цанговой пружиной. В пружине установлен держатель перемещаемого объекта, образующий с пружиной кинематическую пару трения. Внутри пьезотрубки размещены магнит и магнитопроводы, сосредотачивающие поле магнита в цилиндрическом зазоре. В зазоре располагается держатель перемещаемого объекта и жестко связанная с ним катушка. Устройство управления, изменяя ток в катушке, позволяет воздействовать на держатель объекта с целью компенсации негативного влияния сил трения и тяжести на точность позиционирования. Недостаток устройства заключается в следующем. Пьезокерамика, используемая для изготовления трубки, представляет собой упругую среду с достаточно высокой добротностью, поэтому при воздействии крутого среза пилообразного управляющего сигнала в пьезотрубке возникают затухающие колебания. Данные колебания приводят к изменению направления силы трения скольжения, действующей на держатель объекта микроперемещений, что значительно затрудняет компенсацию этой силы и приводит к снижению точности позиционирования объекта.
Задачей изобретения является повышение точности позиционирования объекта микроперемещений за счет демпфирования затухающих колебаний и улучшения степени компенсации негативного воздействия силы трения.
Задача решается тем, что введены две дополнительные катушки, которые жестко связаны с подвижным концом пьезотрубки и размещены в магнитном зазоре, образованном магнитопроводами. При этом первая дополнительная катушка позволяет определить индукционный ток, которой пропорционален скорости колебаний пьезотрубки и противодействует (согласно правила Ленца) изменениям магнитного поля, вызванным колебаниями пьезотрубки. Для улучшения демпфирования усиленный в несколько раз индукционный ток подается во вторую дополнительную катушку.
На фиг.1 показана схема устройства, на фиг.2 - графики, поясняющие работу устройства.
Устройство (фиг.1) содержит основание 1, в котором закреплена одним концом пьезотрубка 2, имеющая два сплошных электрода 3 (внешний и внутренний). На другом конце пьезотрубки 2 закреплена державка 4 с цанговой пружиной 5. Перемещаемый объект располагается на полом держателе 6, образующем с цанговой пружиной 5 кинематическую пару трения. Внутри трубки 2 на основании установлены магнит 9 и магнитопроводы 7, 8, которые сосредотачивают поле магнита 9 в зазоре 10, образованном элементами 7 и 8. В зазоре располагается держатель 6, первая катушка 11, установленная на держателе 6, вторая 12 и третья 13 катушки, установленные на кронштейне 14, жестко связанном с державкой 4. Выводы катушек подключены к устройству управления 15.
Устройство работает следующим образом. Для осуществления микроперемещений объекта на электроды 3 пьезотрубки 2 подается управляющий сигнал несимметричной пилообразной формы. В процессе перемещений объекта на держатель 6 действуют силы тяжести и трения. Устройство 15, управляя током в катушке 11, позволяет компенсировать негативное и усилить полезное воздействие этих сил на работу устройства. Кроме того, устройство управления 15 позволяет демпфировать колебания пьезотрубки 2, вызванные управляющим сигналом, используя для этого катушки 12, 13.
При формировании пологого фронта управляющего сигнала происходит медленная деформация пьезотрубки 2, во время которой со стороны пружин 5 на держатель 6 действует сила трения покоя, перемещающая синхронно элементы 4-6. Управляя током в катушке 11, устройство 15 позволяет содействовать полезному действию силы трения покоя. При формировании крутого среза управляющего сигнала конец пьезотрубки 2 резко возвращается в исходное состояние, вызывая проскальзывание пружины 5 и держателя 6 друг относительно друга. При этом действующие на держатель 6 силы трения скольжения и тяжести вызывают нежелательное смещение держателя 6 из положения, достигнутого в результате полого фронта управляющего сигнала, поэтому устройство управления 15 компенсирует действие этих сил, подавая в катушку 11 ток необходимой величины. Чтобы при формировании крутого среза управляющего сигнала колебания пьезотрубки 2 не приводили к изменению направления силы трения скольжения, данные колебания демпфируют следующим образом. Перемещение свободного конца пьезотрубки 2 приводит к появлению во второй катушке 12 индукционного тока I:
 где В - магнитная индукция в зазоре 10; L - длина проводника катушки 12, находящегося в зазоре 10; R - сопротивление обмотки катушки 12; v - скорость перемещения катушки. Магнитное поле, созданное индукционным током, противодействует (согласно правила Ленца) изменениям магнитного потока, вызванным колебаниями пьезотрубки 2. Вследствие ограничений на размеры катушек, магнитного зазора и мощность магнита величины индукционного тока оказывается недостаточно для полного демпфирования колебаний. С целью усиления демпфирования устройство управления 15 измеряет индукционный ток I в катушке 12, усиливает его и подает в третью катушку 13. Поскольку третья катушка 13 с током находится в магнитном поле, на нее и на каркас 14, соединенный с державкой 4, будет действовать сила Ампера, противодействующая колебаниям пьезоэлемента и увеличивающая степень демпфирования. На фиг.2 показаны характерные графики перемещения державки 4 без демпфирования (пунктирная линия) и с демпфированием (сплошная линия).
где В - магнитная индукция в зазоре 10; L - длина проводника катушки 12, находящегося в зазоре 10; R - сопротивление обмотки катушки 12; v - скорость перемещения катушки. Магнитное поле, созданное индукционным током, противодействует (согласно правила Ленца) изменениям магнитного потока, вызванным колебаниями пьезотрубки 2. Вследствие ограничений на размеры катушек, магнитного зазора и мощность магнита величины индукционного тока оказывается недостаточно для полного демпфирования колебаний. С целью усиления демпфирования устройство управления 15 измеряет индукционный ток I в катушке 12, усиливает его и подает в третью катушку 13. Поскольку третья катушка 13 с током находится в магнитном поле, на нее и на каркас 14, соединенный с державкой 4, будет действовать сила Ампера, противодействующая колебаниям пьезоэлемента и увеличивающая степень демпфирования. На фиг.2 показаны характерные графики перемещения державки 4 без демпфирования (пунктирная линия) и с демпфированием (сплошная линия).
Таким образом, применение дополнительных катушек, связанных с подвижным концом пьезотрубки 2 и размещенных в магнитном зазоре, позволило демпфировать колебания пьезотрубки, вызванные крутым срезом управляющего сигнала, и избежать изменений направления действия силы трения скольжения, что в свою очередь облегчает компенсацию негативного влияния этой силы на точность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2005 |
|
RU2284642C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2247467C1 |
| УСТРОЙСТВО МИКРОПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2272350C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2001 |
|
RU2205474C1 |
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2004 |
|
RU2257645C1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДЕТЕКТОР ОБЪЕКТА ТОЛКАЮЩЕГО И УДАРНОГО ТИПА | 2012 |
|
RU2558715C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| Активная виброизолирующая платформа на основе магнитореологических эластомеров | 2015 |
|
RU2611691C1 |
| Головка для оптического воспроизведения информации | 1989 |
|
SU1644216A1 |
Изобретение относится к области научного приборостроения и предназначено для использования в сканирующих зондовых микроскопах и нанотехнологических установках для микроперемещений объекта. Устройство для микроперемещений объекта содержит основание, магнит с магнитопроводами, державку с цанговой пружиной, держатель объекта, кронштейн, три катушки и пьезоэлектрическую трубку. На основании закреплены магнит с магнитопроводами, а также один конец пьезоэлектрической трубки, другой конец которой снабжен державкой с цанговой пружиной и установленным в пружине держателем перемещаемого объекта. Магнитопроводы образуют магнитный зазор, в котором размещены три катушки, при этом первая катушка размещена на держателе перемещаемого объекта, а вторая и третья катушки размещены на кронштейне, соединенном с державкой. Технический результат - повышение точности позиционирования объекта микроперемещений за счет демпфирования затухающих колебаний и улучшения степени компенсации негативного воздействия силы трения. 2 ил.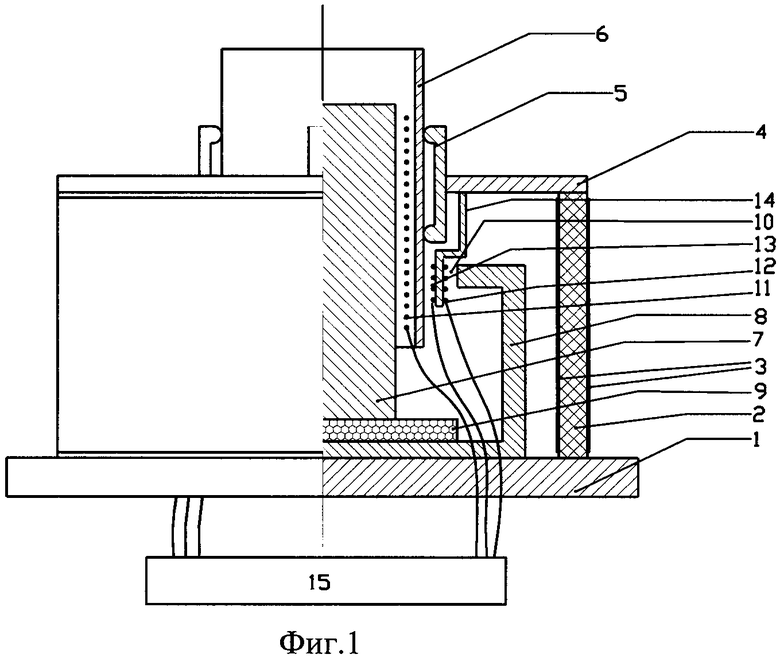
Устройство для микроперемещений объекта, содержащее устройство управления, основание, пьезоэлектрическую трубку со сплошными внешним и внутренним электродами, закрепленную одним концом на основании и снабженную на другом конце державкой с цанговой пружиной, держатель перемещаемого объекта, установленный в цанговой пружине, магнит с магнитопроводами, установленные на основании и формирующие магнитный зазор, первую катушку, соединенную с держателем перемещаемого объекта и подключенную к устройству управления, отличающееся тем, что введены вторая, третья катушки и кронштейн, причем один конец кронштейна соединен с державкой, второй конец кронштейна расположен в магнитном зазоре, вторая и третья катушки размещены на втором конце кронштейне в магнитном зазоре и подключены к устройству управления.
| УСТРОЙСТВО ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2001 |
|
RU2205474C1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2190920C1 |
| US 6215121 В1, 10.04.2001. | |||

