Изобретение относится к машиностроению и может быть использовано в транспортном машиностроении, в частности в автомобилестроении, а также в станкостроении.
Известна автоматическая бесступенчатая механическая передача, содержащая корпус, входной и выходной валы, водило с радиальными осями, на которых размещены основные сателлиты, состоящие из соосно связанных внутренних и внешних конических колес, и дополнительные сателлиты. Внутренние и внешние колеса основных сателлитов введены в зацепление с ведущим колесом, закрепленным на входном валу, и ведомым колесом, закрепленным на выходном валу, причем упомянутые колеса размещены по одну сторону от радиальных осей водила. Дополнительные сателлиты введены в зацепление с центральным опорным колесом, закрепленным на конце полого промежуточного вала, размещенного коаксиально с входным валом. Промежуточный вал связан с входным валом при помощи трех последовательно зацепляющихся колес, первое из которых закреплено на входном валу, второе колесо – на промежуточном валу и третье колесо установлено на опорной оси и является промежуточным между первым и вторым колесами. Опорная ось размещена вне пределов оси передачи. Водило размещено на входном валу с возможностью независимого от него вращения (патент РФ №2174202, МПК 7 F 16 Н 33/14, 3/74, 27.09.2001, Бюл. №27).
У этой автоматической бесступенчатой механической передачи понижаются КПД и эффективность использования мощности двигателя по мере увеличения частоты вращения выходного вала, поскольку при этом уменьшается частота вращения водила, основных и дополнительных сателлитов в связи с тем, что во время работы передачи водило и опорное колесо вращаются в одном направлении. При максимальной частоте выходного вала водило и основные сателлиты неподвижны и упомянутые сателлиты не принимают участия в торможении вращения водила и передаче вращающего момента на выходной вал.
Наиболее близким по совокупности признаков техническим решением к заявленному изобретению является автоматическая бесступенчатая механическая передача, содержащая установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, размещенные по разные стороны от радиальных осей водила ведущее и ведомое центральные колеса, выполненные в виде конических зубчатых колес, закрепленных на соосных ведомом и ведущем валах, основные сателлиты, введенные в зацепление с ведущим и ведомым центральными колесами и образующие с последними пары колес, маховики, установленные на радиальных осях водила, опорное колесо, выполненное в виде конического зубчатого центрального колеса, установленные на радиальных осях водила сателлиты, жестко соосносоединенные с маховиками и введенные в зацепление с опорным колесом. Радиальные оси водила установлены попарно по диаметрам относительно оси передачи и имеют разное назначение. На одной из пар указанных осей размещены по разные стороны от оси передачи основные сателлиты, находящиеся в зацеплении с ведущим и ведомым центральными колесами, а на другой паре осей раздельно от основных сателлитов размещены по разные стороны от оси передачи сателлиты с маховиками. Опорное колесо закреплено на конце полого промежуточного вала, установленного коаксиально с ведущим валом с возможностью вращения относительно этого вала. Другой конец полого промежуточного вала связан с приводом опорного колеса. Одно из зубчатых колес этого привода закреплено на ведущем валу, другое зубчатое колесо указанного привода закреплено на полом промежуточном валу и эти два колеса связаны между собой при помощи промежуточного колеса, ось которого установлена в корпусе передачи и обеспечивает за счет опоры на корпус вне пределов оси передачи возможность изменения передаваемого вращающего момента (патент РФ №2171927, МПК 7 F 16 Н 33/14, 3/74, 10.08.2001, Бюл. №22).
Недостатком указанной автоматической бесступенчатой механической передачи является наличие в ее составе разных по назначению двух пар радиальных осей водила, на одной из которых размещены основные сателлиты, а на другой паре осей – дополнительные сателлиты. Это приводит к увеличению массы водила и передачи в целом и не уменьшает существенно ее габаритные размеры, которые в основном зависят от диаметров всех видов колес, включенных в состав передачи. Размещение на каждой паре радиальных осей водила только основных или только дополнительных сателлитов, каждый из которых вращаются в одном направлении, приводит к воздействию на каждую радиальную ось со стороны сателлитов односторонних по направлению вдоль линии оси передачи гироскопических и прецессионных сил с созданием соответствующих моментов сил относительно точки подшипника водила в плоскости, совмещенной с линией оси передачи, что приводит к необходимости увеличивать прочность и массу упомянутых радиальных осей и усиливать подшипник водила с учетом указанных выше односторонних силовых нагрузок на радиальные оси водила.
Предлагаемое изобретение обеспечивает достижение технического результата, который заключается в упрощении устройства, уменьшении массы передачи и устранении или уменьшении отрицательного воздействия гироскопических и прецессионных сил на радиальные оси и подшипники водила. Вместе с тем, обеспечивается более экономное расходование моторного топлива и при этом уменьшается вредное экологическое воздействие на окружающую среду применяемых двигателей внутреннего сгорания. Одновременно с этим упрощается управление транспортной машиной. Предложенная передача сопоставима с известными ступенчатыми коробками передач по простоте устройства, габаритным размерам и массе. Благодаря постоянному зацеплению применяемых зубчатых колес она подвержена меньшему износу, более долговечна и надежна в работе.
Указанный технический результат достигается тем, что автоматическая бесступенчатая механическая передача содержит установленное с возможностью вращения вокруг линии оси передачи водило с радиальными осями, размещенные по разные стороны от радиальных осей водила ведущее и ведомое центральные колеса, выполненные в виде конических зубчатых колес, закрепленных соответственно на входном и выходном валах, размещенные на радиальных осях водила основные сателлиты, введенные в зацепление с ведущим и ведомым центральными колесами и образующие с последними пары колес, опорное колесо, выполненное в виде конического зубчатого центрального колеса, размещенные на радиальных осях водила дополнительные сателлиты, введенные в зацепление с опорным колесом. Основные и дополнительные сателлиты выполнены массивными с возможностью осуществления также функций маховиков. Опорное колесо закреплено на конце промежуточного вала, установленного коаксиально с входным валом с возможностью вращения относительно этого вала. Другой конец промежуточного вала связан с приводом опорного колеса, одно из зубчатых колес этого привода закреплено на входном валу, другое зубчатое колесо указанного привода закреплено на полом промежуточном валу и эти два колеса связаны между собой при помощи промежуточного зубчатого колеса, ось которого установлена в корпусе передачи и обеспечивает за счет опоры на корпус вне пределов линии оси передачи возможность изменения передаваемого вращающего момента.
Согласно изобретению водило выполнено в виде размещенных на одной линии по обе стороны от линии оси передачи двух радиальных осей водила, на каждой из которых в последовательности от линии оси передачи к концам этих осей водила размещены соответственно основные и дополнительные сателлиты с возможностью независимого друг от друга вращения в противоположных направлениях с устранением вследствие этого отрицательного воздействия гироскопических и прецессионных сил на радиальные оси и подшипники водила. В связи с пересечением линий оси передачи и радиальных осей водила в одной центральной точке, относительно которой совершают вращение сателлиты, обеспечивается возможность проявления закона сохранения векторных моментов количества движения всех сателлитов, являющегося основой работоспособности передачи.
Как частный случай выполнения, привод опорного колеса передачи содержит цилиндрические зубчатые колеса, одно из которых выполнено с внутренним зацеплением, а ось промежуточного зубчатого колеса установлена в корпусе передачи параллельно линии оси передачи.
Как частный случай выполнения, привод опорного колеса содержит конические зубчатые колеса, при этом ось промежуточного колеса установлена в корпусе передачи под углом к линии оси передачи.
Как частный случай выполнения, каждый из основных сателлитов выполнен в виде блока двух колес – внутреннего и внешнего относительно линии оси передачи, введенных порознь в зацепление с разными ведущим или ведомым центральными колесами и образующих с последними пары колес, имеющие разные по величине передаточные отношения.
Как частный случай выполнения, каждый из основных сателлитов передачи выполнен в виде одного зубчатого колеса, введенного в зацепление одновременно с ведущим и ведомым центральными колесами.
Передача снабжена механизмом свободного хода, одна из обойм которого закреплена в корпусе передачи, а другая обойма соединена с водилом с обеспечением возможности свободного вращения водила только в направлении вращения входного вала и стопорения вращения в направлении вращения выходного вала.
Как частный случай выполнения, сателлиты передачи соосно соединены с маховиками, являющимися инерционными грузами, увеличивающими массу сателлитов.
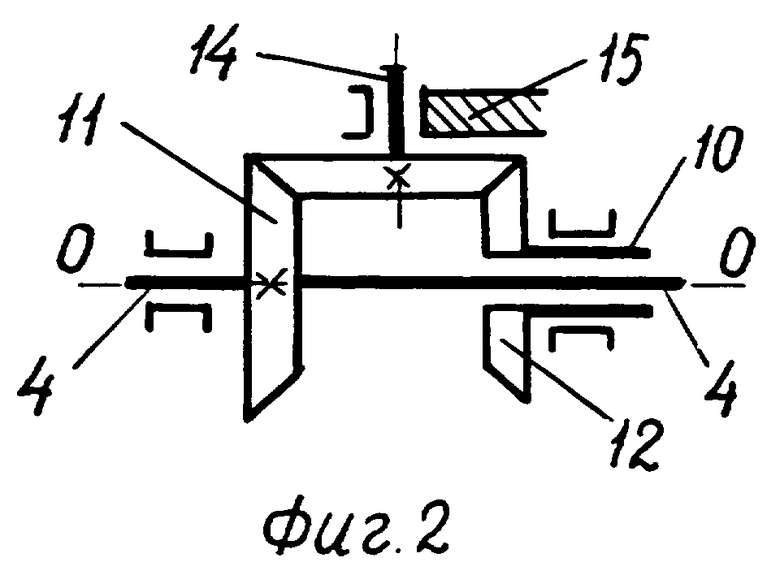
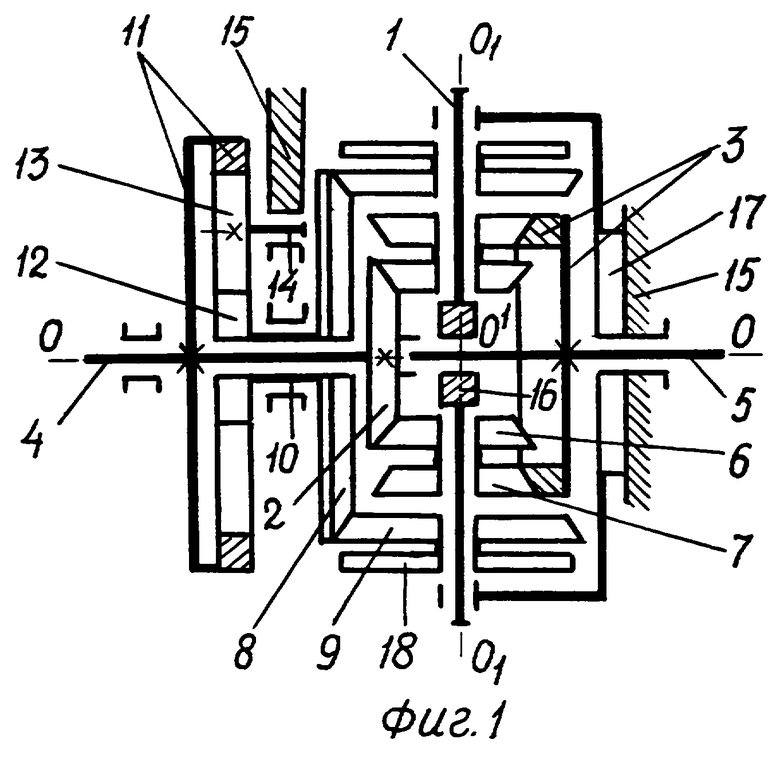
На приведенном чертеже фиг.1 показано в общем виде устройство автоматической бесступенчатой механической передачи, на чертеже фиг.2 показан один из частных случаев выполнения привода опорного колеса с коническими зубчатыми колесами.
Автоматическая бесступенчатая механическая передача содержит установленное с возможностью вращения вокруг линии оси О-О передачи водило 1 с радиальными осями, размещенные по разные стороны от радиальных осей водила ведущее 2 и ведомое 3 центральные колеса, выполненные в виде конических зубчатых колес, закрепленных соответственно на входном 4 и выходном 5 валах, размещенные на радиальных осях водила основные сателлиты 6, 7, введенные в зацепление с ведущим 2 и ведомым 3 центральными колесами и образующие с последними пары колес, опорное колесо 8, выполненное в виде конического зубчатого центрального колеса, размещенные на радиальных осях водила дополнительные сателлиты 9, введенные в зацепление с опорным колесом 8. Основные 6, 7 и дополнительные 9 сателлиты выполнены массивными с возможностью осуществления также функций маховиков. Опорное колесо 8 закреплено на конце полого промежуточного вала 10, установленного коаксиально с входным валом 4 с возможностью вращения относительно этого вала. Другой конец промежуточного вала 10 связан с приводом опорного колеса. Одно из зубчатых колес 11 этого привода закреплено на входном валу 4, другое зубчатое колесо 12 указанного привода закреплено на полом промежуточном валу и эти два колеса связаны между собой при помощи промежуточного зубчатого колеса 13, ось 14 которого установлена в корпусе 15 передачи и обеспечивает за счет опоры на корпус вне пределов линии оси О-О передачи возможность изменения передаваемого вращающего момента на выходной вал в зависимости от приложенной к нему нагрузки.
Водило 1 выполнено в виде размещенных на одной линии О1-О1 по обе стороны от линии оси О-О передачи двух радиальных осей водила, на каждой из которых в последовательности от линии оси передачи к концам этих осей водила размещены соответственно основные 6, 7 и дополнительные 9 сателлиты с возможностью независимого друг от друга вращения в противоположных направлениях с устранением вследствие этого отрицательного воздействия гироскопических и прецессионных сил на радиальные оси и подшипник 16 водила. При этом в связи с пересечением линий оси О-О передачи и радиальных осей О1-О1 водила в одной центральной точке О1, относительно которой совершают вращение сателлиты, обеспечивается возможность проявления закона сохранения векторных моментов количества движения всех сателлитов, являющегося основой работоспособности передачи.
Как частный случай выполнения, привод опорного колеса содержит цилиндрические зубчатые колеса, одно 11 из которых выполнено с внутренним зацеплением, а ось 14 промежуточного зубчатого колеса 13 установлена в корпусе 15 передачи параллельно линии оси О-О передачи.
Как частный случай выполнения (фиг.2), привод опорного колеса содержит конические зубчатые колеса 11, 12, при этом ось 14 промежуточного зубчатого колеса 13 установлена в корпусе 15 передачи под углом к линии оси О-О передачи.
Как частный случай выполнения, каждый из основных сателлитов выполнен в виде блока двух колес – внутреннего 6 и внешнего 7 относительно линии оси О-О передачи, введенных в зацепление порознь с ведущим 2 или ведомым 3 центральными колесами и образующих с последними пары колес, имеющие разные по величине передаточные отношения.
Как частный случай выполнения, каждый из основных сателлитов передачи выполнен в виде единого зубчатого колеса, введенного в зацепление одновременно с ведущим 2 и ведомым 3 центральными колесами.
Передача снабжена механизмом свободного хода 17, одна из обойм которого закреплена в корпусе 15 передачи, а другая обойма соединена с водилом 1 с обеспечением возможности свободного вращения водила только в направлении вращения входного вала 4 и стопорения вращения в направлении вращения выходного вала 5.
Как частный случай выполнения, сателлиты соосно соединены с маховиками 18, являющимися инерционными грузами, увеличивающими массу сателлитов.
Автоматическая бесступенчатая механическая передача работает следующим образом.
При вращении входного вала 4 с ведущим центральным колесом 2 и неподвижным выходном вале 5 в связи с приложенной к нему нагрузкой или началом вращения из неподвижного положения блоки из двух колес 6, 7 основных сателлитов вращаются на радиальных осях водила 1 вокруг линии О1-О1 этих осей, поскольку в описываемом случае внутренние колеса 6 упомянутых сателлитов находятся в зацеплении с вращающимся ведущим центральным колесом 2, а сблокированные с внутренними колесами 6 внешние колеса 7 основных сателлитов перекатываются по неподвижному ведомому центральному колесу 3, вовлекая водило 1 с его радиальными осями во вращение вокруг линии оси О-О передачи в направлении вращения входного вала 4. Вместе с водилом 1 вращаются вокруг линии оси О-О передачи установленные на радиальных осях водила дополнительные сателлиты 9, которые находятся в зацеплении с опорным колесом 8. При частном выполнении передачи, когда сателлиты соединены с маховиками 18, эти маховики вращаются при всех режимах работы передачи вместе с соответствующими сателлитами.
Привод опорного колеса 8 при помощи входящих в его состав колес 11, 12, 13 передает постоянное вращение при любых режимах работы передачи от входного вала 4 на промежуточный вал 10 и закрепленное на нем опорное колесо 8 в направлении, противоположном направлению вращения входного вала 4 и ведущего центрального колеса 2. При этом водило 1 с его радиальными осями и опорное колесо 8 вращаются вокруг линии оси О-О передачи в противоположных направлениях. Это обеспечивает вращение дополнительных сателлитов 9 одновременно вокруг линии оси О-О передачи и линии радиальных осей О1-О1 водила, а соответственно и относительно центральной точки О1 пересечения упомянутый линий осей, с максимальной частотой.
Указанным выше порядком совершают вращение и сблокированные колеса 6, 7 основных сателлитов, поскольку внутреннее из этих колес 6 находится в зацеплении с вращающимся ведущим центральным колесом 2, а внешнее колесо 7 взаимодействует с неподвижным при данном режиме работы ведомым центральным колесом 3.
В связи с тем, что ведомое центральное колесо 3 и опорное колесо 8 размещены по разные стороны от водила 1, блоки колес 6, 7 основных сателлитов и дополнительные сателлиты 9 вращаются на радиальных осях водила в противоположных направлениях. Это приводит к тому, что действующие на указанные основные сателлиты 6, 7 и дополнительные сателлиты 9 гироскопические и прецессионные силы направлены в противоположные стороны, что снимает нагрузку или уменьшает действие этих сил на радиальные оси водила 1 и моментов упомянутых сил на подшипник 16 водила. При этом имеется в виду, что действие моментов обоих упомянутых сил относительно центральной точки О1 и подшипника 16 водила 1 будет направлено не в сторону вращения водила, а в перпендикулярном направлении, т.е. в направлении плоскости, совпадающей с линией оси О-О передачи и линией О1-O1 радиальных осей водила 1. Это вытекает из известных свойств гироскопа, свойствами которых обладают все применяемые в данной передаче сателлиты вместе с соединенными с ними маховиками (см. “Физический энциклопедический словарь” под ред. А.М.Прохорова, Москва, “Советская энциклопедия”, 1984 г., стр. 125-127, рис. 4, 7 и 8).
Одновременное вращение основных 6, 7 и дополнительных 9 сателлитов вокруг двух пересекающихся осей – линии оси О-О передачи и линии радиальных осей О1-О1 водила - равнозначно их вращению относительно центральной точки О1 пересечения упомянутых линий осей. Известно, что вращающееся тело имеет определенный момент количества движения, который проявляется с соблюдением фундаментального всеобщего закона сохранения, согласно которому момент количества движения может быть изменен только под действием внешних сил. Известно также, что момент количества движения при вращении тел относительно точки является векторной величиной. При указанном выше характере вращения всех сателлитов 6, 7, 9 относительно центральной точки О1 векторы их моментов количества движения постоянно изменяют свое направление. Действия над векторами являются отражением соответствующих действий над векторными величинами (см. “Политехнический словарь” под ред. А.Ю.Ишлинского, издание второе, изд. “Советская энциклопедия”, Москва, 1980 г., стр. 73/1).
Из сказанного следует, что проявление всеобщего закона сохранения момента количества движения противодействует вращению водила 1 с его радиальными осями вокруг линии оси О-О передачи. В связи с этим водило и его радиальные оси являются опорой для передачи вращающего момента от ведущего центрального колеса 2 через блоки колес 6, 7 основных сателлитов на ведомое центральное колесо 3 и далее на выходной вал 5.
Как указано выше, при неподвижном ведомом центральном колесе 3 частота вращения дополнительных сателлитов 9 относительно центральной точки О1 является наибольшей. Частота вращения блоков колес 6, 7 основных сателлитов вокруг линии оси О-О передачи также является наибольшей. Следовательно, при данных условиях противодействие вращению водила 1 вокруг линии оси О-О передачи также будет максимальным, что обеспечит передачу на неподвижное ведомое центральное колесо 3 максимального по величине вращающего момента. При этом обеспечивается возможность работы двигателя и вращения входного вала 4 вместе с ведущим центральным колесом 2 при неподвижном выходном вале 5. Внешней опорой для торможения вращения водила 1 и обеспечения передачи и преобразования вращающего момента в конечном итоге является корпус 15 автоматической передачи, в котором установлена ось промежуточного колеса 14 привода опорного колеса 8.
Из сказанного выше следует, что величина тормозящего момента силы, приложенного к водилу 1, зависит от массы вращающихся всех сателлитов 6, 7 и 9 и от частоты их вращения относительно центральной точки О1, а также от передаточных отношений всех включенных в состав передачи пар колес. Этим определяются основные параметры передачи.
Под действием максимального по величине момента силы, приложенного к ведомому центральному колесу 3, оно начинает вращаться в противоположном направлении по сравнению с входным валом 4 и ведущим центральным колесом 2. Это приводит к замедлению вращения водила 1 с радиальными осями вокруг линии оси О-О передачи с одновременным замедлением вращения дополнительных сателлитов 9 вокруг линии радиальных осей О1-О1 водила и центральной точки О1. Соответственно уменьшаются связанный с этим тормозящий момент силы на водиле 1 и зависящая от этого величина передаваемого вращающего момента.
Вместе с тем, с началом вращения ведомого центрального колеса 3 частота вращения блока колес 6, 7 основных сателлитов вокруг линии радиальных осей О1-О1 водила увеличивается, поскольку основные сателлиты входят в зацепление с ведущим 2 и ведомым 3 центральными колесами, которые вращаются в противоположных направлениях. Это обеспечивает сохранение тормозящего момента силы на водиле 1 при любом режиме работы передачи.
При дальнейшем увеличении частоты вращения ведомого центрального колеса 3 происходит одновременное уменьшение частоты вращения водила 1 вокруг линии оси О-О передачи с соответствующим уменьшением приложенного к нему тормозящего момента силы и величины передаваемого на выходной вал вращающего момента.
При максимальной частоте вращения ведомого центрального колеса 3 и выходного вала 5 водило 1 неподвижно. Однако и при этом к нему приложен тормозящий момент силы, обеспечивающий передачу вращающего момента на ведомое центральное колесо 3. Это обусловлено тем, что опорное колесо 8 постоянно вращается и приводит во вращение дополнительные сателлиты 9 при любых режимах работы, в том числе и при неподвижном водиле 1. Помимо этого, при указанных условиях блоки колес 6, 7 основных сателлитов вращаются с максимальной частотой, поскольку они введены в зацепление с вращающимися в противоположных направлениях ведущим 2 и ведомым 3 центральными колесами, первое из которых вращается с постоянной частотой, а ведомое центральное колесо 3 – с максимальной частотой. Устойчивость водила 1 и его радиальных осей при данном режиме работы обеспечивается тем, что даже при их незначительных поворотах вокруг линии оси О-О передачи происходит изменение направления векторов моментов количества движения всех сателлитов относительно центральной точки О1 с проявлением при этом всеобщего закона сохранения момента количества движения.
При частном случае выполнения передачи с соединенными с сателлитами маховиками 18 последние усиливают действие инерционных масс соответствующих сателлитов при работе передачи.
При частном случае выполнения передачи, когда каждый из основных сателлитов выполнен в виде единого зубчатого колеса, характер указанной выше работы передачи остается прежним, но с меньшими возможностями определения величины передаточного отношения между ведущим 2 и ведомым 3 центральными колесами. Вместе с тем, при этом упрощается устройство передачи.
При необходимости передачи вращающего момента и вращения от выходного вала 5 на входной вал 4 с целью торможения рабочей машины работа двигателя прекращается. При этом под воздействием вращающегося выходного вала 5 происходит замыкание механизма свободного хода 17, который препятствует вращению водила в направлении вращения выходного вала 5 и обеспечивает передачу вращения и потока мощности от вращающегося выходного вала 5 на входной вал 4 и далее на двигатель, который оказывает сопротивление вращению его вала при неработающем режиме, что приводит к торможению рабочей машины. Это же обеспечивает пуск двигателя путем буксировки рабочей машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247274C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247885C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171930C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171929C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2001 |
|
RU2184894C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172877C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277653C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2279596C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277656C1 |
Изобретение относится к машиностроению и может быть использовано в автомобилестроении и станкостроении. Передача содержит водило 1 с основными 6, 7 и дополнительными 9 сателлитами, ведущее 2 и ведомое 3 центральные колеса, опорное колесо 8, входной 4 и выходной 5 валы. Сателлиты выполнены массивными с возможностью осуществления также функций маховиков. Опорное колесо 8 закреплено на коаксиальном входному валу полом промежуточном валу 10, который связан с приводом опорного колеса 8, состоящим из трех зубчатых колес 11,12 и 13, из которых колесо 13 является промежуточным между упомянутыми двумя колесами, его ось 14 установлена в корпусе 15 передачи. Две радиальные оси водила 1 размещены на одной линии осей О1-О1 и несут на себе основные и дополнительные сателлиты с возможностью независимого друг от друга вращения в противоположных направлениях. Линия оси О-О передачи и линии радиальных осей О1-О1 водила пересекаются в центральной точке О1, относительно которой совершают вращения сателлиты. Технический результат – упрощение конструкции, уменьшение массы передачи, обеспечение автоматического изменения вращающего момента в зависимости от нагрузки на выходном валу. 6 з.п. ф-лы, 2 ил.
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171927C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172877C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174202C2 |

