Изобретение относится к машиностроению и может быть использовано в транспортном машиностроении, в частности в автомобилестроении, а также в станкостроении.
Известна автоматическая бесступенчатая инерционная передача, содержащая корпус, соосные ведущий и ведомый валы, водило с радиальными осями, вращающиеся на них независимо друг от друга сблокированные по два сателлиты и сателлиты, сблокированные с маховиками, размещенные по одну сторону от радиальных осей ведущее и ведомое центральные конические зубчатые колеса, установленное соосно оси передачи центральное коническое зубчатое опорное колесо. Это опорное колесо введено в зацепление с сателлитами и посредством зубчатых колес связано с ведущим центральным коническим колесом. Вращение маховиков с сателлитами одновременно вокруг оси передачи и вокруг радиальных осей водила приводит к торможению вращения водила в связи с постоянным изменением направления векторов моментов количества движения маховиков относительно центральной точки и обеспечивает передачу вращающего момента на ведомый вал (патент РФ 2163316, МПК 7 F 16 Н 33/14, 3/74, 20.02.2001, Бюл. №5).
Недостатком этой автоматической бесступенчатой инерционной передачи является ничем не восполнимое уменьшение противодействия вращению водила по мере увеличения частоты вращения ведомого вала, что обусловлено замедлением при атом вращения всех сателлитов на радиальных осях водила.
Наиболее близким по совокупности признаков техническим решением к заявленной передаче является автоматическая бесступенчатая механическая передача, содержащая входной и выходной валы, закрепленные на этих валах ведущее и ведомое центральные конические зубчатые колеса, установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, на которых с возможностью вращения установлены симметрично оси передачи сателлиты – основные и вспомогательные. Основные сателлиты выполнены в виде сблокированных по два конических зубчатых колес – внутренних и внешних относительно оси передачи, введенных в зацепление с разными центральными коническими колесами и составляющими с ними пары конических зубчатых колес, имеющих разные по величине передаточные отношения. С корпусом передачи жестко соединено зубчатое коническое центральное неподвижное опорное колесо, введенное в зацепление со вспомогательными сателлитами. Ведущее и ведомое центральные зубчатые колеса размещены по одну сторону от радиальных осей водила, а блоки основных сателлитов и вспомогательные сателлиты размещены на радиальных осях водила с возможностью независимого друг от друга вращения. В корпусе передачи в плоскости, совмещенной с осью передачи, размещен опорный вал, на котором закреплено зубчатое колесо, введенное в зацепление с двумя зубчатыми колесами, одно из которых закреплено на входном валу, а другое колесо закреплено на полом промежуточном валу, который установлен коаксиально с входным валом и на нем закреплено зубчатое коническое центральное подвижное опорное колесо, находящееся в зацеплении с размещенными на радиальных осях водила дополнительными сателлитами, при этом обеспечивается вращение входного и промежуточного валов в противоположных направлениях (патент РФ 2171931, МПК 7 F 16 Н 33/14 3/74, 10.08.2001, Бюл. №22).
Недостатком этой автоматической бесступенчатой механической передачи является то, что водило и подвижное опорное колесо вращаются в одном направлении, что приводит к уменьшению частоты вращения блока основных сателлитов и дополнительных сателлитов. При максимальной частоте вращения выходного вала, когда водило неподвижно, дополнительные сателлиты не вращаются в связи с зацеплением с неподвижным опорным колесом. Указанные оба обстоятельства приводят к уменьшению противодействия вращению водила по мере увеличения частоты вращения ведомого колеса и ведомого вала, что уменьшает эффективность работы передачи.
Предлагаемое изобретение обеспечивает более интенсивное противодействие вращению водила при всех режимах работы передачи, что увеличивает надежность силовой связи входного вала с выходным валом с преобразованием при этом величины передаваемого вращающего момента и частоты вращения выходного вала в зависимости от приложенной к этому валу нагрузки.
Указанный технический результат достигается тем, что автоматическая бесступенчатая механическая передача содержит соосные входной и выходной валы, закрепленные на этих валах центральные конические зубчатые ведущее и ведомое колеса, установленное с возможностью вращения вокруг линии оси передачи водило с радиальными осями, на которых с возможностью вращения установлены выполненные из конических зубчатых колес сателлиты – основной, дополнительный и вспомогательный. Основной сателлит выполнен в виде сблокированных двух колес – внутреннего и внешнего относительно линии оси передачи, введенных в зацепление раздельно с ведущим и ведомым колесами и составляющие с ними пары колес, определяющие заданные передаточные отношения. Ведущее и ведомое колеса размещены по одну сторону от радиальных осей водила. Вспомогательный сателлит введен в зацепление с центральным коническим зубчатым вспомогательным опорным колесом. Дополнительный сателлит введен в зацепление с центральным коническим зубчатым дополнительным опорным колесом, установленном на коаксиальном к входному валу полом дополнительном промежуточном валу, который связан с входным валом при помощи привода указанного дополнительного опорного колеса, состоящего из цилиндрических зубчатых колес и опорного вала, размещенного в корпусе передачи параллельно входному валу, при этом указанный дополнительный промежуточный вал имеет возможность вращения относительно входного вала. Все сателлиты – основной, дополнительный и вспомогательный размещены на радиальных осях водила с возможностью независимого друг от друга вращения.
Согласно изобретению вспомогательное опорное колесо установлено на коаксиальном к выходному валу полом вспомогательном промежуточном валу, который связан с выходным валом при помощи привода указанного вспомогательного опорного колеса, состоящего из цилиндрических зубчатых колес и опорного вала, размещенного в корпусе передачи параллельно выходному валу. Два колеса этого привода закреплены на опорном валу и введены в зацепление порознь с колесами, закрепленными соответственно на выходном валу и вспомогательном промежуточном валу с образованием пар колес, и эти пары колес имеют общее передаточное отношение, обеспечивающее возможность вращения вспомогательного промежуточного вала с вспомогательным опорным колесом с большей частотой по сравнению с выходным валом и ведомым колесом и в одном с ними направлении. Привод дополнительного опорного колеса выполнен аналогично указанному выше приводу вспомогательного опорного колеса, но с соответствующими колесами, закрепленными на входном валу и дополнительном промежуточном валу с обеспечением вращения дополнительного промежуточного вала с дополнительным опорным колесом с большей частотой по сравнению с входным валом и ведущим колесом и в одном с ними направлении. Взаимное положение указанных выше элементов передачи обеспечивает возможность вращения водила с его радиальными осями вокруг линии оси передачи в противоположном направлении по сравнению с дополнительным и вспомогательным опорными колесами.
Сателлиты выполнены с массивными ободами и одновременно с передачей вращающих моментов и вращательных движений выполняют также функции маховиков.
Линия оси передачи и линия радиальных осек водила пересекаются в одной центральной точке.
Как частный случай выполнения, передача содержит по одному основному, дополнительному и вспомогательному сателлиту с расположением суммарного их центра масс на линии оси передачи.
Как частный случай выполнения, передача содержит по два основных, дополнительных и вспомогательных сателлита, каждые из которых размещены симметрично к линии оси передачи на соответствующих радиальных осях водила.
Как частный случай выполнения, передача содержит две размещенных на одной диаметральной линии радиальных оси водила, на каждой из которых с возможностью независимого друг от друга вращения размещены в возможных разных сочетаниях основные, дополнительные и вспомогательные сателлиты.
Как частный случай выполнения, водило содержит две пары перпендикулярных меду собой радиальных осей и на каждой из этих пар радиальных осей размещены с возможностью независимого друг от друга вращения соответственно основные или дополнительные, или вспомогательные сателлиты в возможных разных сочетаниях.
Входной и выходной валы передачи связаны механизмом свободного хода, ведущий элемент которого связан с выходным валом, а ведомый элемент – с входным валом.
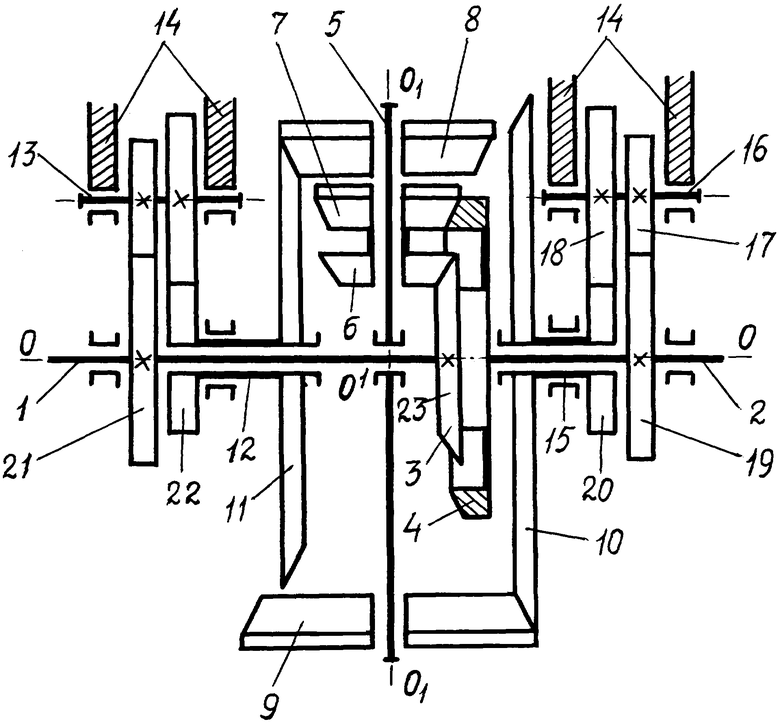
На чертеже дан общий вид автоматической бесступенчатой механической передачи (далее – “передача”).
Передача содержит соосные входной 1 и выходной 2 валы, закрепленные на этих валах центральные конические зубчатые ведущее 3 и ведомое 4 колеса, установленное с возможностью вращения вокруг линии оси О-О передачи водило 5 с радиальными осями, на которых с возможностью вращения установлены выполненные из конических зубчатых колес сателлиты – основной 6, 7, дополнительный 8 и вспомогательный 9. Основной сателлит выполнен в виде сблокированных двух колес – внутреннего 6 и внешнего 7 относительно линии оси О-О передачи, введенных в зацепление раздельно с ведущим 3 и ведомым 4 колесами и составляющие с ними пары колес, определяющие заданные передаточные отношения. Ведущее 3 и ведомое 4 колеса размещены по одну сторону от радиальных осей водила. Вспомогательный сателлит 9 введен в зацепление с центральным коническим зубчатым вспомогательным опорным колесом 10. Дополнительный сателлит 8 введен в зацепление с центральным коническим зубчатым дополнительным опорным колесом 11, установленным на коаксиальном к входному валу 1 полом дополнительном промежуточном валу 12, который связан с входным валом при помощи привода указанного дополнительного опорного колеса, состоящего из цилиндрических зубчатых колес и опорного вала 13, размещенного в корпусе 14 передачи параллельно входному валу. При этом указанный дополнительный промежуточный вал 12 имеет возможность вращения относительно входного вала 1. Все сателлиты – основной 6, 7, дополнительный 8 и вспомогательный 9 размещены на радиальных осях водила 5 с возможностью независимого друг от друга вращения. Вспомогательное опорное колесо 10 установлено на коаксиальном к выходному валу 2 полом вспомогательном промежуточном валу 15, который связан с выходным валом при помощи привода указанного вспомогательного опорного колеса 10, состоящего из цилиндрических зубчатых колес и опорного вала 16, размещенного в корпусе 14 передачи параллельно выходному валу. Два колеса 17, 18 этого привода закреплены на опорном валу 16 и введены в зацепление порознь с колесами 19, 20, закрепленными соответственно на выходном валу 2 и вспомогательном промежуточном валу 15 с образованием пар колес, и эти пары колес имеют общее передаточное отношение, обеспечивающее возможность вращения вспомогательного промежуточного вала с вспомогательным опорным колесом 10 с большей частотой по сравнению с выходным валом и ведомым колесом 4 и в одном с ними направлении. Привод дополнительного опорного колеса 11 выполнен аналогично указанному выше приводу вспомогательного опорного колеса 19, но с соответствующими колесами 21, 22, закрепленными на входном валу 1 и дополнительном промежуточном валу 12 с обеспечением вращения дополнительного промежуточного вала с дополнительным опорным колесом 11 с большей частотой по сравнению с входным валом 1 и ведущим колесом 3 и в одном с ними направлении. Взаимное положение указанных выше элементов передачи обеспечивает возможность вращения водила 5 с его радиальными осями вокруг линии оси О-О передачи в противоположном направлении по сравнению с дополнительным 11 и вспомогательным 10 опорными колесами.
Сателлиты 6, 7, 8, 9 выполнены с массивными ободами и одновременно с передачей вращающих моментов и вращательных движений, выполняют также функции маховиков.
Линия оси О-О передачи и линия радиальных осей О1-О1 водила 5 пересекаются в одной центральной точке О1.
Как частный случай выполнения, передача содержит по одному основному 6, 7, дополнительному 8 и вспомогательному 9 сателлиту с расположением суммарного их центра масс на линии оси О-О передачи.
Как частный случай выполнения, передача содержит по два основных 6, 7, дополнительных 8 и вспомогательных 9 сателлита, каждые из которых размещены симметрично к линии оси О-О передачи на соответствующих радиальных осях водила 5.
Как частный случай выполнения, передача содержит две размещенных на одной диаметральной линии О1-О1 радиальных оси водила 5, на каждой из которых с возможностью независимого друг от друга вращения размещены в возможных разных сочетаниях основные 6, 7, дополнительные 8 и вспомогательные 9 сателлиты.
Как частный случай выполнения, водило 5 содержит две пары перпендикулярных между собой радиальных осей и на каждой из этих пар радиальных осей размещены с возможностью независимого друг от друга вращения соответственно основные 6, 7 или дополнительные 8, или вспомогательные 9 сателлиты в возможных разных сочетаниях.
Входной и выходной валы передачи связаны механизмом свободного хода 23, ведущий элемент которого связан с выходным валом 2, а ведомый элемент – с входным валом 1.
Передача работает следующим образом.
При вращении входного вала 1 с ведущим колесом 3 и неподвижном выходном вале 2 с ведомым колесом 4 в связи с приложенной к выходному валу нагрузкой или началом вращения из неподвижного положения, ведущее колесо приводит во вращение находящееся с ним в зацеплении внутреннее колесо 6 основного сателлита и сблокированное с ним внешнее колесо 7 основного сателлита, которое перекатывается по неподвижному ведомому колесу и вовлекает водило 5 с его радиальными осями во вращение вокруг линии оси О-О передачи в противоположном направлении вращению ведущего колеса 3. При вращении водила 5 размещенные на его радиальных осях дополнительный 8 и вспомогательный 9 сателлиты перекатываются по находящимся с ними в зацеплении соответственно дополнительному 11 и вспомогательному 10 опорным колесам. Вспомогательное опорное колесо 10 при этом неподвижно, поскольку оно связано своим приводом с неподвижным выходным валом 2. В связи с этим частота вращения вспомогательного сателлита 9 на радиальной оси водила 5 будет зависеть при данном режиме работы только от частоты вращения водила вокруг линии оси О-О передачи.
Дополнительное опорное колесо 11 при любых режимах работы передачи будет вращаться с большей частотой по сравнению с входным валом 1 и ведущим колесом 3 в противоположном направлении по сравнению с вращением водила 5. В связи с этим находящийся в зацеплении с дополнительным опорным колесом дополнительный сателлит 8 будет вращаться на радиальной оси водила при данном режиме работы с максимальной частотой.
Одновременное вращение всех сателлитов 6, 7, 8, 9, выполняющих также функцию массивных маховиков, вокруг двух пересекающихся линий осей О передачи и О1-О1 радиальных осей водила 5 равнозначно их вращению относительно центральной точки О1 пересечения этих линий осей. Известно, что вращающееся тело имеет определенный момент количества движения, который проявляется с соблюдением фундаментального физического закона сохранения, согласно которому момент количества движения может быть изменен только под действием внешних сил. Известно также, что момент количества движения при вращении тел относительно точки является векторной величиной. При указанном выше характере вращения сателлитов относительно центральной точки 01 векторы их моментов количества движения постоянно изменяют свое направление. Действия над векторами являются отражением соответствующих действий над векторными величинами (см. “Политехнический словарь” под ред. А.Ю.Ишлинского, издание второе, изд. “Советская энциклопедия”, Москва - 1980, стр. 73/1).
Из сказанного следует, что проявление закона сохранения момента количества движения в отношении всех массивных сателлитов противодействует вращению водила 5 вокруг линии оси О-О передачи. В связи с этим водило и его радиальные оси являются опорой для передачи вращающего момента от ведущего колеса 3 через блок колес 6, 7 основного сателлита на ведомое колесо 4 и далее на выходной вал 2.
Как указано выше, при неподвижном выходном вале 2 все сателлиты 6, 7, 8, 9 совершают вращение относительно центральной точки О1, в том числе дополнительный сателлит 8 и основной сателлит 6, 7 – с максимальной частотой. Следовательно, и величина противодействия вращению водила 5 вокруг линии оси О-О передачи будет также максимальной, что обеспечит условие передачи на выходной вал максимального по величине вращающего момента, зависящего в том числе и от суммарного передаточного отношения находящихся в зацеплении двух пар колес – ведущего колеса 3, внутреннего колеса 6 основного сателлита и внешнего колеса 7 основного сателлита, ведомого колеса 4. При этом обеспечивается возможность работы двигателя при неподвижном выходном вале.
Внешними опорами для противодействия вращению водила и обеспечения при этом возможности передачи вращающего момента с определенной его величиной от входного вала на выходной вал являются в конечном итоге установленные в корпусе 14 передачи опорные валы 13 и 16 приводов дополнительного 11 и вспомогательного 10 опорных колес, которые определяют характер компоновки всех элементов передачи и возможность их функционирования для достижения цели изобретения. Определяющим при этом является то, что величина вращающего момента при его передаче может быть изменена только при наличии внешней опоры, не совпадающей с линией оси передачи, что обеспечивается в данном случае применением опорных валов 13 и 16.
Под действием максимального по величине момента силы, приложенного к выходному валу 2, он начинает вращаться в том же направлении, что и входной вал 1. Это приводит к замедлению вращения водила 5 вокруг линии оси О-О передачи с одновременным замедлением вращения основных 6, 7 и дополнительного 8 сателлитов на радиальных осях водила 5, а соответственно и к уменьшению частоты вращения указанных сателлитов относительно центральной точки О1. Следовательно, по мере увеличения частоты вращения выходного вала 2 возможности основного и дополнительного сателлитов по обеспечению передачи вращающего момента также уменьшаются в той же степени. Этим обеспечивается автоматизм в преобразовании передаваемого вращающего момента в зависимости от нагрузки на выходном вале.
Вместе с тем, по мере увеличения частоты вращения выходного вала 2 частота вращения вспомогательного сателлита на радиальной оси водила также увеличивается. Это обусловлено тем, что привод вспомогательного опорного колеса 10 обеспечивает его вращение с большей частотой по сравнению с частотой вращения ведомого колеса 4 и выходного вала 2 вокруг линии оси О-О передачи. Этому способствует также вращение вспомогательного опорного колеса 10 и водила 5 с его радиальными осями во взаимно противоположных направлениях.
При максимальной частоте вращения ведомого колеса 4 и выходного вала 2 водило 5 неподвижно. Однако и при этом к нему приложен тормозящий момент силы, обеспечивающий передачу вращающего момента на ведомое колесо. Это обусловлено тем, что дополнительный 8 и вспомогательный 9 сателлиты вращаются на радиальных осях водила 5 при любых режимах работы передачи, в том числе вспомогательный сателлит 9 при неподвижном водиле вращается на его оси с максимальной частотой.
Устойчивость водила 5 в неподвижном положении и его противодействие вращению вокруг линии оси О-О передачи обеспечивается тем, что даже при незначительных его поворотах происходит изменение направлений векторов моментов количества движения основного, дополнительного и вспомогательного сателлитов с проявлением при этом закона сохранения момента количества движения.
Преимуществом описываемой передачи перед известными автоматическими бесступенчатыми механическими передачами является то, что по мере увеличения частоты вращения выходного вала 2 частота вращения вспомогательного сателлита 9 на радиальной оси водила 5 и относительно центральной точки О1 также возрастает, что повышает надежность и эффективность работы передачи по преобразованию передаваемого вращающего момента и частоты вращения выходного вала в зависимости от приложенной к нему нагрузки.
Технические характеристики передачи определяются передаточными отношениями всех пар зубчатых колес, входящих в ее состав, а также массой всех сателлитов и соотношениями между сателлитами в величине этих масс, выполняющих функции маховиков и инерционных грузов.
Характер работы передачи при наличии в ее составе двух радиальных осей водила 5 или двух пар перпендикулярных между собой радиальных осей водила, а также при разном количестве сателлитов на этих осях будет одинаков.
При необходимости передачи вращающего момента и вращения от выходного вала 2 на входной вал 1 с целью торможения рабочей машины, работа двигателя прекращается. При этом под воздействием вращающегося выходного вала происходит замыкание механизма свободного хода 23, который обеспечивает передачу вращения на входной вал и далее на двигатель, обеспечивающий противодействие вращению выходного вала. Это же обеспечивает возможность пуска двигателя путем буксировки рабочей машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247885C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172878C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174200C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277653C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171930C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2279596C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277657C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 1999 |
|
RU2163317C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171932C2 |
Изобретение относится к машиностроению и может быть использовано в автомобилестроении и станкостроении. Передача содержит корпус 14, соосные входной 1 и выходной 2 валы, центральные конические зубчатые ведущее 3 и ведомое 4 колеса, водило 5 с радиальными осями и сателлитами - сблокированным из двух колес 6, 7 основным, дополнительным 8 и вспомогательным 9 сателлитами, зацепленными соответственно с ведущим 3, ведомым 4, дополнительным опорным 11 и вспомогательным опорным 10 центральными коническими зубчатыми колесами. Дополнительное 11 и вспомогательное 10 опорные колеса закреплены на своих дополнительном 12 и вспомогательном 15 полых промежуточных валах, установленных коаксиально соответственно к входному 1 и выходному 2 валам и связанных с ними посредством состоящих из зубчатых колес и опорных валов 13, 16 приводов. Передача и преобразование вращающего момента осуществляются путем торможения водила при изменении направления векторов моментов количества движения. Технический результат - повышение эффективности работы передачи. 7 з.п. ф-лы, 1 ил.
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ИНЕРЦИОННАЯ ПЕРЕДАЧА | 2000 |
|
RU2163316C2 |

