Изобретение относится к области гидроакустики и может быть использовано в рыбной промышленности для “отвлечения” и “отпугивания” морских млекопитающих (ММ) от орудий лова с рыбой.
Задача, которая решается изобретением, заключается в формировании, усилении и излучении гидроакустических информационных и энергетических сигналов для эффективного и длительного управления поведением ММ (включая ММ, не имеющих естественных “хищников”) в большом объеме водной среды при промысле рыбы в диапазоне частот, ограниченном диапазоном частот наибольшей акустической чувствительности рыб - объекта промысла.
Способ реализуется следующим образом.
В процессе перемещения рыбопромыслового судна в районе промысла или в период постановки орудий лова в блоке формирования информационных сигналов канала формирования и излучения информационных сигналов осуществляется формирование информационных сигналов, аналогичных гидроакустическим сигналам, излучаемым выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами (в том числе и выборочными устройствами). В одноканальном усилителе мощности осуществляется усиление данных информационных сигналов до необходимого уровня, а с помощью излучателя, расположенного на корпусе рыбопромыслового судна, осуществляется излучение гидроакустических информационных сигналов Fi.
Одновременно с этим вдали от места установки орудия лова, которое планируется выбирать на борт судна в ближайшее время, в толще воды на различных горизонтах устанавливается и приводится в рабочее состояние путем включения электрического питания несколько автономных морских систем. При этом в каждой автономной морской системе с помощью блока формирования и усиления информационных сигналов и малогабаритного ненаправленного излучателя гидроакустических информационных сигналов осуществляется формирование, усиление и излучение гидроакустических информационных сигналов Fi Одновременно с этим при помощи подводной лампы осуществляется излучение световых сигналов по программе, заданной блоком формирования и усиления информационных сигналов. Гидроакустические информационные сигналы Fi и световые сигналы воздействуют на ММ и изменяют их поведенческие характеристики - ММ, привлекаемые “характерными звуками” рыбопромыслового судна в момент “фальшивой выборки орудий лова”, напрасно подходят к гидроакустическим излучателям информационных сигналов Fi и утрачивают выработанный ранее условный рефлекс - “легкое питание с помощь рыбы, находящейся в поднимаемых с глубины орудиях лова”.
В момент выборки орудия лова на борт рыбопромыслового судна блок управления работой каналов выключает блок формирования информационных сигналов канала формирования и излучения информационных сигналов и включает на постоянную работу блок формирования энергетических сигналов первого канала формирования и излучения энергетических сигналов, которые формирует сигналы, по спектру полностью перекрывающие информационные сигналы Fi (аналогичные гидроакустическим сигналам, излучаемые выбираемым орудием лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами). В многоканальном усилителе мощности осуществляется усиление данных сигналов до необходимого уровня, а с помощью ненаправленных излучателей, опускаемых с борта рыбопромыслового судна на разные горизонты при помощи кабель-тросов соответствующей длины, осуществляется излучение гидроакустических энергетических сигналов Fj1, полностью перекрывающих по спектру и амплитуде гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами. Гидроакустические энергетические сигналы Fj1 распространяются в объеме водной среды, прилегающем к рыбопромысловому судну, на значительные расстояния, воздействуют на ММ (в первую очередь на их информационный канал) и изменяют их поведенческие характеристики - ММ “не слышат характерных звуков” в период подъема орудий лова на борт рыбопромыслового судна и не подходят к рыбопромысловому судну.
Кроме того, блок управления работой каналов во время выборки орудия лова на борт рыбопромыслового судна по специальной программе на определенные интервалы времени дополнительно включает в работу второй канал формирования и излучения энергетических сигналов. При этом во втором блоке формирования энергетических сигналов осуществляется формирование сигналов ультразвукового диапазона частот на двух близких частотах F1 и F2. В двухканальном усилителе мощности осуществляется усиление данных сигналов до необходимого уровня. С помощью сумматора и направленного излучателя гидроакустических энергетических сигналов ультразвукового диапазона частот, расположенного на корпусе рыбопромыслового судна и ориентированного вперед по ходу движения судна, осуществляется излучение в водную среду гидроакустических энергетических сигналов F1 и F2. В неоднородной водной среде происходит нелинейное взаимодействие акустических волн на частотах F1 и F2 с образованием низкочастотной волны разностной частоты: Fj2=F1-F2, которая распространяется на значительные расстояния от рыбопромыслового судна, воздействует на внутренние органы и мозг ММ и дополнительно (к излученным энергетическим сигналам Fj2) изменяет их поведенческие характеристики. При этом частотный диапазон информационного сигнала Fi, энергетического сигнала Fj1, сигналов F1 и F2 ограничен снизу верхней граничной частотой, а энергетического сигнала Fj2 - сверху нижней граничной частотой, диапазона частот наибольшей акустической чувствительности рыб - объекта промысла.
Известен способ управления поведением ММ, основанный на формировании, усилении и излучении энергетических сигналов, воздействии энергетических сигналов на морских ММ и изменении их поведенческих характеристик [1].
Основными недостатками данного способа являются:
1.Недостаточная эффективность управления поведением ММ.
2. Невозможность управления поведением ММ в процессе промысла рыбы из-за “отпугивания” рыб от орудий лова.
3. Недостаточная эффективность процесса управления поведением ММ из-за относительно быстрой их адаптации к излучаемым сигналам.
4. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ.
Известен способ управления поведением ММ, основанный на формировании, усилении и излучении информационных сигналов, воздействии информационных сигналов на ММ и изменении их поведенческих характеристик [2].
К недостаткам данного способа относятся:
1. Невозможность управления поведением ММ в процессе промысла рыбы из-за “отпугивания” рыб от орудий лова.
2. Недостаточная эффективность из-за невозможности управления поведением всех ММ (например, косаток, не имеющих в природе “хищников”).
3. Недостаточная эффективность процесса управления поведением ММ из-за быстрой их адаптации к излучаемым сигналам “хищника”.
4. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ.
Известен способ управления поведением ММ при промысле рыбы, основанный на формировании, усилении, излучении и воздействии информационных сигналов на ММ и изменении их поведенческих характеристик, при этом в качестве информационных сигналов используются сигналы “конкурента” и сигналы “жертвы”, модулированные доплеровскими сигналами, имитирующими движение “конкурента” и “жертвы”, информационные сигналы излучаются в течение определенных интервалов времени, а их диапазон ограничен граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла [3].
К недостаткам данного способа относятся:
1. Недостаточная эффективность процесса управления из-за невозможности управления поведением всех ММ (например, косаток, не имеющих в природе “хищников”).
2. Недостаточная эффективность процесса управления поведением ММ из-за быстрой их адаптации к излучаемым сигналам.
3. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ.
Наиболее близким по технической сущности к заявляемому относится способ (выбранный в качестве способа-прототипа) управления поведением ММ при промысле рыбы, основанный на формировании, усилении и излучении информационных и энергетических сигналов, воздействии информационных и энергетических сигналов на ММ и изменении их поведенческих характеристик; в качестве информационных сигналов используются гидроакустические сигналы, излучаемые выборочными устройствами, излучение информационных сигналов осуществляется непрерывно в период движения судна и в период постановки орудий лова в море, а энергетические сигналы излучаются в период подъема орудий лова на борт рыбопромыслового судна при помощи пространственно разнесенных нескольких гидроакустических излучателей; в период подъема орудий лова на борт рыбопромыслового судна информационные сигналы не излучаются, а энергетические сигналы излучаются непрерывно и маскируют гидроакустические сигналы, излучаемые выборочными устройствами; частотный диапазон информационных и энергетических сигналов ограничен снизу верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла [4].
К недостаткам способа-прототипа относятся:
1. Недостаточная эффективность процесса управления поведением ММ из-за быстрой их адаптации к излучаемым сигналам.
2. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ.
Поставленная цель достигается тем, что в известном способе управления поведением ММ при промысле рыбы, основанном на формировании, усилении и излучении информационных и энергетических сигналов, воздействии информационных и энергетических сигналов на ММ и изменении их поведенческих характеристик, в качестве информационных сигналов используются гидроакустические сигналы, излучаемые, выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами; в качестве энергетических сигналов используются широкополосные гидроакустические сигналы, излучаемые в период подъема орудий лова на борт рыбопромыслового судна при помощи пространственно разнесенных нескольких ненаправленных широкополосных гидроакустических излучателей и маскирующих гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами, а также два тональных гидроакустических сигнала ультразвукового диапазона частот на близких частотах, излучаемых в сторону MM - объекта управления, в диапазоне частот максимальной акустической чувствительности ММ при помощи направленного излучателя ультразвукового диапазона частот, при этом разностная частота двух тональных гидроакустических сигналов ультразвукового диапазона частот находится в инфразвуковом диапазоне частот, воздействует на внутренние органы ММ и дополнительно изменяет их поведенческие характеристики; дополнительно, в момент выборки орудий лова, с помощью ненаправленного гидроакустического излучателя широкополосных гидроакустических сигналов и с помощью подводной лампы соответственно излучаются информационные гидроакустические сигналы и световые сигналы при помощи нескольких автономных приборов, расположенных в толще воды на значительном удалении от рыбопромыслового судна.
Для повышения эффективности процесса управления поведением ММ в качестве информационных сигналов используются гидроакустические сигналы, излучаемые, выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами.
Для повышения эффективности процесса управления поведением ММ в качестве энергетических сигналов используются широкополосные гидроакустические сигналы, излучаемые в период подъема орудий лова на борт рыбопромыслового судна при помощи пространственно разнесенных нескольких ненаправленных широкополосных гидроакустических излучателей и маскирующих гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами.
Для повышения эффективности процесса управления поведением ММ в качестве энергетических сигналов используются также два тональных гидроакустических сигнала ультразвукового диапазона частот на близких частотах, излучаемых в сторону MM - объекта управления, в диапазоне частот максимальной акустической чувствительности ММ при помощи направленного излучателя ультразвукового диапазона частот. При этом разностная частота двух тональных гидроакустических сигналов ультразвукового диапазона частот находится в инфразвуковом диапазоне частот, воздействует на внутренние органы и нервную систему ММ и дополнительно изменяет их поведенческие характеристики.
Для увеличения объема водной среды, в котором осуществляется управление поведением ММ, дополнительно, в момент выборки орудий лова, с помощью ненаправленного гидроакустического излучателя широкополосных гидроакустических сигналов и с помощью подводной лампы соответственно излучаются информационные гидроакустические сигналы и световые сигналы при помощи нескольких автономных приборов, расположенных в толще воды на значительном удалении от рыбопромыслового судна.
Отличительными признаками заявляемого способа являются:
1. В качестве информационных сигналов используются гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами.
2. В качестве энергетических сигналов используются широкополосные гидроакустические сигналы, излучаемые в период подъема орудий лова на борт рыбопромыслового судна при помощи пространственно разнесенных нескольких ненаправленных широкополосных гидроакустических излучателей и маскирующих гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами.
3. В качестве энергетических сигналов используются также два тональных гидроакустических сигнала ультразвукового диапазона частот на близких частотах, излучаемых в сторону MM - объекта управления, в диапазоне частот максимальной акустической чувствительности ММ при помощи направленного излучателя ультразвукового диапазона частот, при этом разностная частота двух тональных гидроакустических сигналов ультразвукового диапазона частот находится в инфразвуковом диапазоне частот, воздействует на внутренние органы ММ и дополнительно изменяет их поведенческие характеристики.
4. Дополнительно, в момент выборки орудий лова, с помощью ненаправленного гидроакустического излучателя широкополосных гидроакустических сигналов и с помощью подводной лампы соответственно излучаются информационные гидроакустические сигналы и световые сигналы при помощи нескольких автономных приборов, расположенных в толще воды на значительном удалении от рыбопромыслового судна.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков показал следующее.
Признаки 1-4 является новыми, и неизвестно их использование для управления поведением ММ (включая косаток) при промысле рыбы.
В то же время в прикладной гидроакустике известно использование признака 1 - для “маскировки” подводных шумов одного судна подводными шумами другого судна; в промысловой гидроакустике известно использование признака 2 - для управления поведением рыб и ММ (за исключением косаток); в нелинейной гидроакустике известно использование признака 3 - для формирования в неоднородной водной среде низкочастотной волны разностной частоты, а в прикладной гидроакустике известно использование признака 3 - для воздействия на биологические объекты; в прикладной гидроакустике известно использование признака 4 - для обозначения местоположения подводного изделия в толще воды.
Таким образом, наличие новых существенных признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - в течение заданного интервала времени в большом объеме водной среды эффективно управлять поведением ММ (включая косаток) при промысле рыбы путем формирования, усиления и излучения гидроакустических информационных и энергетических сигналов в диапазоне частот, ограниченном снизу верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла.
В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
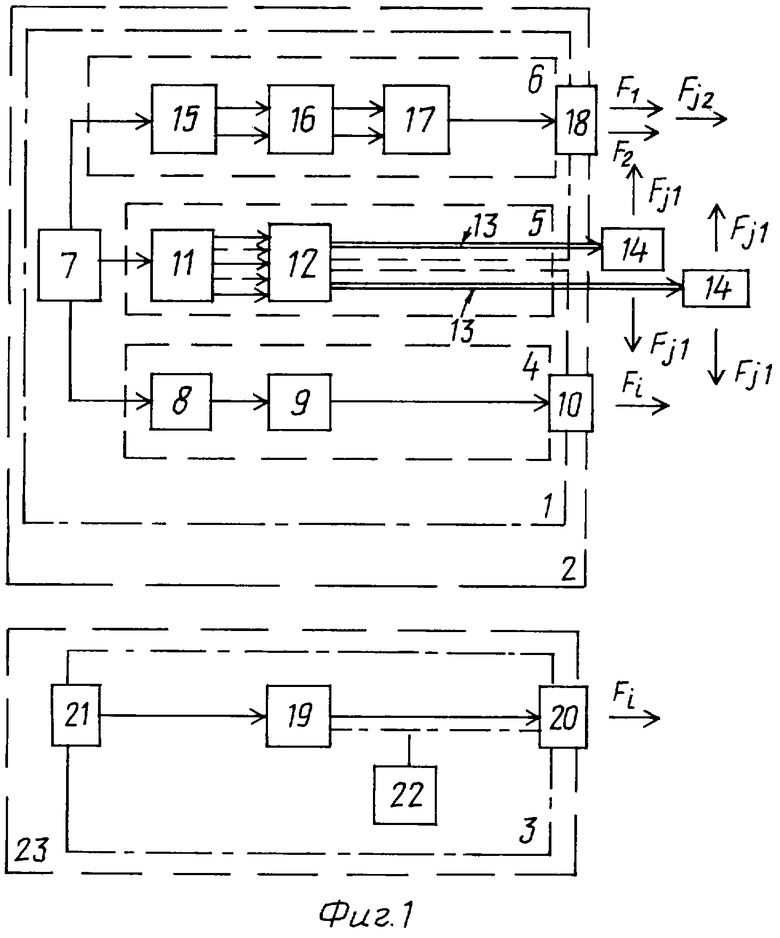
На фиг.1 представлена структурная схема устройства, с помощью которого реализуется разработанный способ управления поведением ММ при промысле рыбы.
Устройство содержит: бортовую систему (1), расположенную на рыбопромысловом судне (2), а также идентичные друг дугу автономные морские системы (3), находящиеся в толще воды на значительном удалении от рыбопромыслового судна (2). При этом бортовая система (1) включает в себя: канал формирования и излучения информационных сигналов (4), первый канал формирования и излучения энергетических сигналов (5), второй канал формирования и излучения энергетических сигналов (6), блок управления (7) работой указанных выше каналов бортовой системы (1). Канал формирования и излучения информационных сигналов (4) содержит последовательно электрически соединенные блок формирования информационных сигналов (8), одноканальный усилитель мощности (9) и излучатель гидроакустических информационных сигналов (10), расположенный на корпусе рыбопромыслового судна (2). Первый канал формирования и излучения энергетических сигналов (5) содержит последовательно электрически соединенные первый блок формирования энергетических сигналов (11), многоканальный усилитель мощности (12) и ненаправленные излучатели (по числу каналов многоканального усилителя мощности) гидроакустических энергетических сигналов (14), опускаемые с борта рыбопромыслового судна (2) на разные горизонты при помощи кабель-тросов (13) соответствующей длины. Второй канал формирования и излучения энергетических сигналов (6) содержит последовательно электрически соединенные второй блок формирования энергетических сигналов (15), двухканальный усилитель мощности (16), сумматор (17) и направленный излучатель (18) гидроакустических энергетических сигналов ультразвукового диапазона частот, расположенный на корпусе рыбопромыслового судна (2) и ориентированный вперед по ходу движения судна. Каждая автономная морская система (3) содержит блок формирования и усиления информационных сигналов (19), к первому выходу которого подключен малогабаритный ненаправленный излучатель (20) гидроакустических информационных сигналов, а ко второму выходу блока (19) подключена подводная лампа (21). Электрическое питание блока формирования и усиления информационных сигналов (19) и подводной лампы (21) осуществляется с помощью высокоемкостного многократно перезаряжаемого аккумулятора (22). При этом блок формирования и усиления информационных сигналов (19) и высокоемкостной многократно перезаряжаемый аккумулятор (22) находятся внутри герметичного контейнера (23), а малогабаритный ненаправленный излучатель (20) гидроакустических информационных сигналов находится снаружи герметичного контейнера (23).
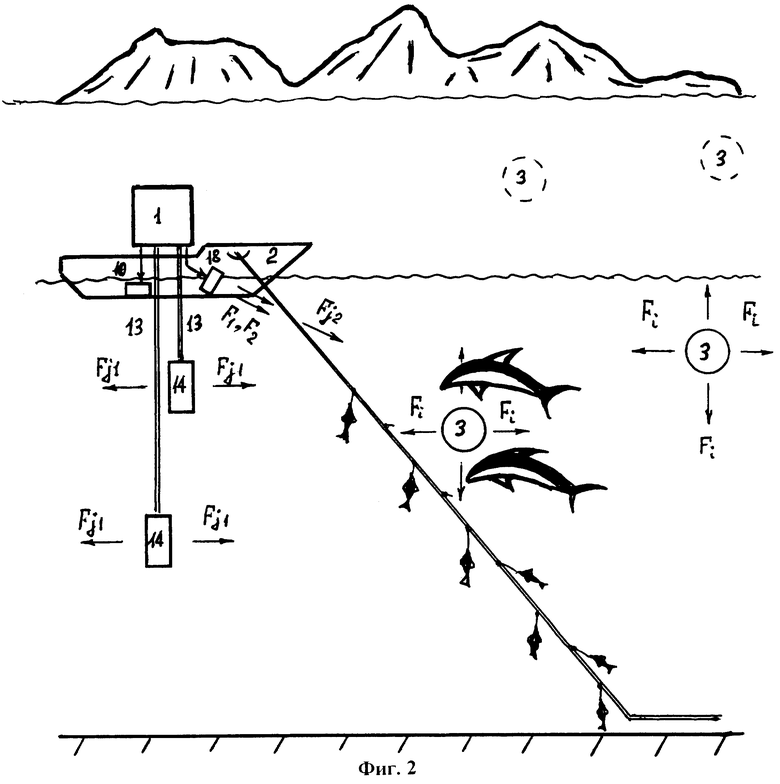
На фиг.2 поясняется принцип действия устройства, реализующего разработанный способ управления поведением ММ при промысле рыбы.
Устройство функционирует следующим образом (фиг.1, 2).
В процессе движения рыбопромыслового судна (2) в районе промысла или в период постановки орудия лова в блоке формирования информационных сигналов (8) канала формирования и излучения информационных сигналов (4) осуществляется формирование информационных сигналов, аналогичных гидроакустическим сигналам, излучаемым выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами (в том числе и выборочными устройствами). В одноканальном усилителе мощности (9) осуществляется усиление данных информационных сигналов до необходимого уровня, а с помощью излучателя (10), расположенного на корпусе рыбопромыслового судна (2), осуществляется излучение гидроакустических информационных сигналов Fi.
Одновременно с этим вдали от места установки орудия лова, которое планируется выбирать на борт судна в ближайшее время, в толще воды на различных горизонтах устанавливается и приводится в рабочее состояние, путем включения электрического питания, несколько автономных морских систем (3). При этом в каждой автономной морской системе (3) с помощью блока формирования и усиления (19) информационных сигналов и малогабаритного ненаправленного излучателя (20) гидроакустических информационных сигналов осуществляется формирование, усиление и излучение гидроакустических информационных сигналов Fi. Одновременно с этим при помощи подводной лампы (21) осуществляется излучение световых сигналов по программе, заданной блоком формирования и усиления информационных сигналов. Гидроакустические информационные сигналы Fi и световые сигналы воздействуют на ММ и изменяют их поведенческие характеристики - ММ, привлекаемые “характерными звуками” рыбопромыслового судна в момент “фальшивой выборки орудий лова”, напрасно подходят к гидроакустическим излучателям информационных сигналов Fi и утрачивают выработанный ранее условный рефлекс - “легкое питание с помощь рыбы, находящейся в поднимаемых с глубины орудиях лова”.
В момент выборки орудия лова на борт рыбопромыслового судна (2) блок управления (7) работой каналов выключает блок формирования информационных сигналов (8) канала формирования и излучения информационных сигналов (4) и включает на постоянную работу блок формирования (11) энергетических сигналов первого канала формирования и излучения энергетических сигналов (5), которые формирует сигналы, по спектру полностью перекрывающие информационные сигналы Fi (аналогичные гидроакустическим сигналам, излучаемым выбираемым орудием лова, корпусом рыбопромыслового судна (2), а также судовыми системами и механизмами, в том числе и выборочными устройствами). В многоканальном усилителе мощности (12) осуществляется усиление данных сигналов до необходимого уровня, а с помощью ненаправленных излучателей (14), опускаемых с борта рыбопромыслового судна (2) на разные горизонты при помощи кабель-тросов (13) соответствующей длины, осуществляется излучение гидроакустических энергетических сигналов Fj1, полностью перекрывающих по спектру и амплитуде гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна (2), а также судовыми системами и механизмами, в том числе и выборочными устройствами. Гидроакустические энергетические сигналы Fj1 распространяются в объеме водной среды, прилегающем к рыбопромысловому судну (2), на значительные расстояния, воздействуют на ММ (в первую очередь на их информационный канал) и изменяют их поведенческие характеристики - ММ “не слышат характерных звуков” в период подъема орудий лова на борт рыбопромыслового судна и не подходят к рыбопромысловому судну.
Кроме того, блок управления (7) работой каналов во время выборки орудия лова на борт рыбопромыслового судна (2) по специальной программе на определенные интервалы времени дополнительно включает в работу второй канал формирования и излучения энергетических сигналов (6). При этом во втором блоке формирования энергетических сигналов (15) осуществляется формирование сигналов ультразвукового диапазона частот на двух близких частотах F1 и F2. В двухканальном усилителе мощности (16) осуществляется усиление данных сигналов до необходимого уровня. С помощью сумматора (17) и направленного излучателя (18) гидроакустических энергетических сигналов ультразвукового диапазона частот, расположенного на корпусе рыбопромыслового судна (2) и ориентированного вперед по ходу движения судна, осуществляется излучение в водную среду гидроакустических энергетических сигналов F1 и F2. В неоднородной водной среде происходит нелинейное взаимодействие акустических волн на частотах F1 и F2 с образованием низкочастотной волны разностной частоты: Fj2=F1-F2, которая распространяется на значительные расстояния от рыбопромыслового судна (2), воздействует на внутренние органы и мозг ММ и дополнительно (к излученным энергетическим сигналам Fj2) изменяет их поведенческие характеристики. При этом частотный диапазон информационного сигнала Fi, энергетического сигнала Fji, сигналов F1 и F2 ограничен снизу верхней граничной частотой, а энергетического сигнала Fj2 - сверху нижней граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла.
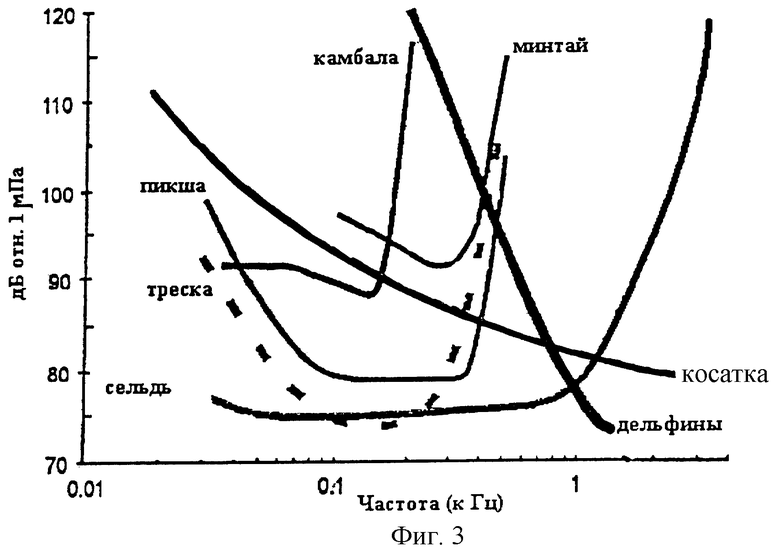
Для примера на фиг.3 представлены диапазоны частот наибольшей акустической чувствительности некоторых промысловых рыб [5, 6]. Как видно из фиг.3, диапазон частот информационных и энергетических сигналов управления поведением ММ при промысле рыбы должен быть ограничен частотами ~20...30 Гц (сверху) и ~500...600 Гц (снизу) - для трески, ~20...30 Гц (сверху) и ~3 кГц - для сельди и т.д.
На фиг.3, для примера, приведены также нижние граничные частоты акустической чувствительности некоторых ММ (дельфина и косатки) - объекта управления [7, 8]. Из фиг.3 видно, что у косаток (в отличие от дельфина) нижняя часть диапазона максимальной акустической чувствительности практически полностью перекрывает диапазоны акустической чувствительности указанных на фиг.3 рыб - объекта промысла. Это необходимо учитывать при формировании информационных и энергетических гидроакустических сигналов управления поведением конкретного вида ММ (косатки, дельфина, сивуча, нерпы и т.д.).
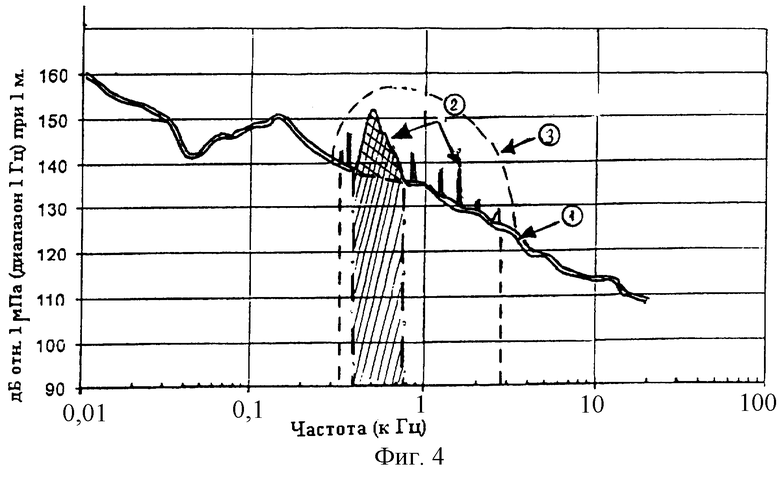
На фиг.4 индексами “1”, “2” и “3” обозначены типовые спектрограммы гидроакустического поля рыбопромыслового судна в момент постановки орудий лова (индекс “1”), при выборке орудий лова в штатном режиме работы (индекс “2”), а также в момент выборки орудий лова с излучением гидроакустических энергетических сигналов Fj1 (индекс “3”).
Как видно из фиг.4 (спектрограмма №2), спектр частот у данного рыбопромыслового судна в момент выборки орудия лова занимает диапазон частот ~от 300 Гц до ~3 кГц. Данное обстоятельство необходимо использовать при формировании и излучении информационных и энергетических гидроакустических сигналов.
Как видно из фиг.4 (спектрограмма №3), излучение гидроакустических энергетических сигналов Fj1 при помощи нескольких пространственно разнесенных ненаправленных излучателей широкополосных гидроакустических сигналов “замаскировало” (уровень излучаемых гидроакустических энергетических сигналов ~ на 5-20 дБ превышает уровень гидроакустических сигналов рыбопромыслового судна) “характерные гидроакустические сигналы” рыбопромыслового судна в момент выборки его орудий лова.
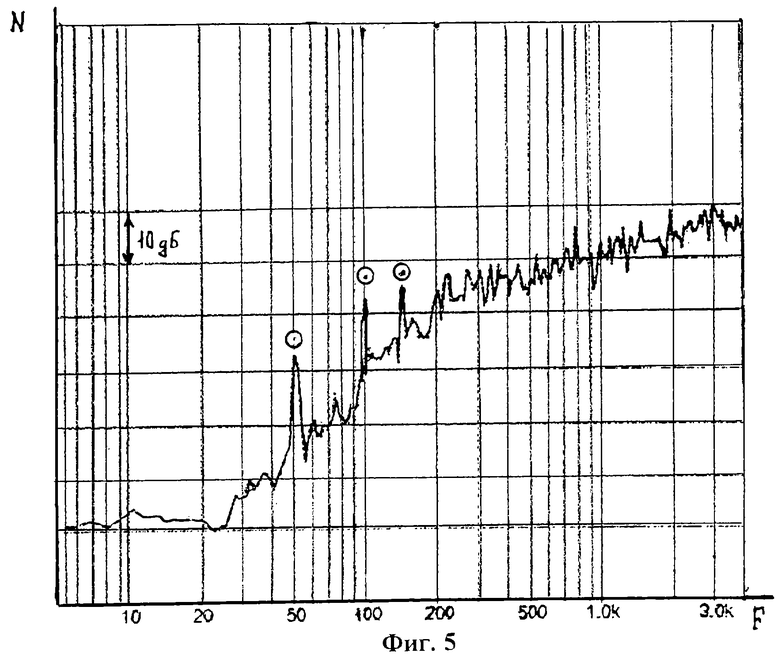
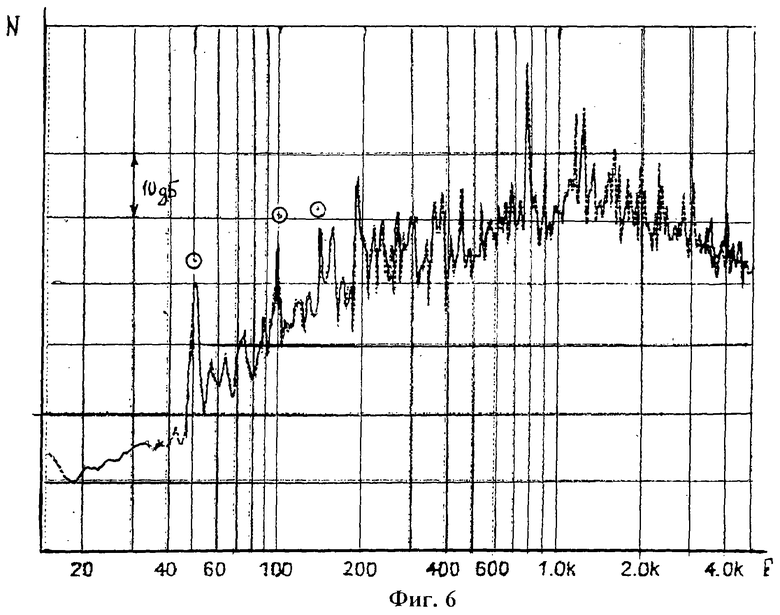
На фиг.5 и 6 представлены типовые спектры гидроакустического поля рыбопромыслового судна проекта “503” в момент постановки и в момент выборки орудия лова (ярус) соответственно. Как видно из фиг.5 и 6, в обоих случаях в спектрах их гидроакустических полей регистрируются дискретные составляющие (ДС) электрического происхождения с базовой частотой 50 Гц и две ее высшие гармоники (100 и 150 Гц).
В то же время, как видно из фиг.6, при выборке орудия лова на борт рыбопромыслового судна в спектре его гидроакустического поля регистрируется большое количество новых ДС в диапазоне частот ~ до 4 кГц, по амплитуде существенно (в среднем на 10-15 дБ) превосходящих сплошную часть спектра. По нашему мнению, именно характерные звуки на данных ДС (для конкретного судна) и привлекают ММ к орудиям лова в момент их выборки на борт рыбопромыслового судна.
Однако следует заметить, что ММ используют не только пассивный (биологический шумопеленгатор), но и активный (биологический гидролокатор) гидроакустический канал для поиска и идентификации рыб - объекта питания [6-8]. В этой связи на практике могут возникнуть ситуации, когда ММ случайно (например, в процессе своей естественной миграции и т.д.) приблизятся к рыбопромысловому судну в момент выборки его орудий лова и “увидят” рыбу при помощи своего биологического гидролокатора на небольшом расстоянии от себя. Тогда простое излучение гидроакустических энергетических сигналов Fj1 может оказаться мало эффективным - ММ продолжат свое движение к рыбе, находящейся в орудии лова.
Именно для решения этой задачи в процессе реализации разработанного способа управления поведением ММ предусмотрено излучение второго типа гидроакустических энергетических сигналов - Fj2.
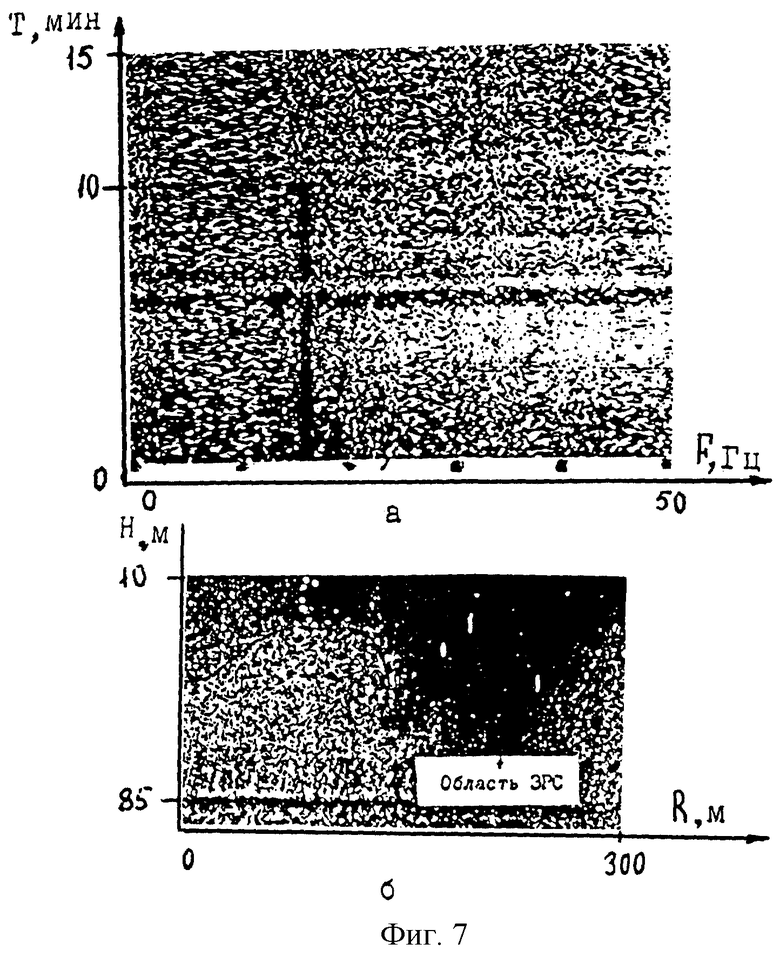
Известно [9], что гидроакустические сигналы инфразвукового (от 1 до ~20 Гц) и низкого звукового диапазонов частот (от ~20 до ~400 Гц) “неблагоприятно” воздействуют на все биологические объекты (в том числе и на ММ), если они излучаются в диапазоне частот их акустической чувствительности. Известно также [8], что максимальная акустическая чувствительность, например, косаток наблюдается в диапазоне частот ~15 кГц. Поэтому если излучать какие-то гидроакустические сигналы большой интенсивности именно в этом диапазоне частот, то они также будут оказывать неблагоприятное воздействие (вызывать дискомфорт) на косаток (в данном случае) и ММ (косатки) со временем покинут эту область водного пространства. В этой связи именно этот диапазон частот был выбран для излучения гидроакустических сигналов F1 и F2, с помощью которых в неоднородной водной среде формировалась (нелинейным методом [10]) низкочастотная волна разностной частоты Fj2 (гидроакустический энергетический сигнал второго типа), которая воздействовала на ММ (косаток) и дополнительно изменяла их поведенческие характеристики - “вытесняла” ММ из данной области водного пространства.
Для примера на фиг.7 индексом “а” обозначена спектрограмма сигнала низкочастотной волны разностной частоты ~18 Гц, зарегистрированной в водной среде в непосредственной близости от выбираемого на борт рыбопромыслового судна орудия лова, а также эхограмма (индекс “б”) сигнала ~15 кГц (средняя частота гидроакустических сигналов F1 и F2).
Морские промысловые испытания разработанного способа управления поведением морских животных при промысле рыб проводились в сентябре-октябре 2002 года в северной части Охотского моря и показали его высокую эффективность. В качестве объекта промысла использовались треска и палтус (диапазон акустической чувствительности палтуса близок к диапазону акустической чувствительности камбалы, фиг.3), а в качестве ММ использовались косатки.
Повышение эффективности процесса управления поведением ММ достигнуто за счет того, что в качестве информационных сигналов использовались гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами.
Повышение эффективности процесса управления поведением ММ достигнуто также за счет того, что в качестве энергетических сигналов использовались широкополосные гидроакустические сигналы, излучаемые в период подъема орудий лова на борт рыбопромыслового судна при помощи пространственно разнесенных нескольких ненаправленных широкополосных гидроакустических излучателей и маскирующих гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами.
Повышение эффективности процесса управления поведением ММ достигнуто также за счет того, что в качестве энергетических сигналов дополнительно использовались два тональных гидроакустических сигнала ультразвукового диапазона частот на близких частотах, излучаемые в сторону MM - объекта управления, в диапазоне частот максимальной акустической чувствительности ММ при помощи направленного излучателя ультразвукового диапазона частот и дополнительно изменяла их поведенческие характеристики. При этом разностная частота двух тональных гидроакустических сигналов находилась в инфразвуковом диапазоне частот, воздействовала на внутренние органы и нервную систему ММ и дополнительно изменяла их поведенческие характеристики.
Увеличение объема водной среды, в котором осуществляется управление поведением ММ, достигалось за счет того, что дополнительно, в момент выборки орудий лова, с помощью ненаправленного гидроакустического излучателя широкополосных гидроакустических сигналов и при помощи подводной лампы соответственно излучались информационные гидроакустические сигналы и световые сигналы несколькими автономными приборами, расположенными в толще воды на значительном удалении от рыбопромыслового судна.
Литература
1. Murchison A.E. and Pepper R.L. Escape conditioning in the bottlenosed dolphin/ Cetology, 1972, №8, pp.1-5.
2. Cummings W.C. and Thompson P.O., 1971. Gray whales, Eschrichtius robustus, avoid the underwather sounds of killer whales. Fishery Bulletion, v.69, №3, p.525-530.
3. Бахарев С.А. Способ управления поведением морских животных в процессе промысла рыбы. - Патент РФ №2213357 (заявка №2002102035), приоритет 21.01.02 г.
4. Бахарев С.А. Способ управления поведением морских животных при промысле рыбы. - Решение ФИПС о выдаче Патента РФ по заявке №2002104655 от 20.02.02 г. - Бюллетень ФИПС №0325 от 10.09.03 г.
5. Сорокин М.А. Слуховые способности некоторых дальневосточных рыб // Автореферат диссертации к.б.н.- М.: ИЭМЭЖ, 1984, 28 с.
6. Шишкова Е.В. Физические основы промысловой гидроакустики.- М.: Пищевая промышленность, 1977, с.233-239.
7. Вуд Ф.Г. Морские млекопитающие и человек /Перевод с английского под ред. А.А.Щербакова. - Л.: Гидрометеоиздат, 1979, 262 с.
8. J.D. Hal, C.S. Johnson. Auditory thresholds of a killer whale Orcinus orca Linneaus. - JASA, 1972, v.51, №2, Pt.2, p.515-517.
9. Довгуша В.В., Тихонов М.Н., Кудрин И.Д. Биологическое действие низкоинтенсивных экологических факторов. Экологические системы и приборы. - 2002, №1, с.37-39.
10. Westervelt P.J. Parametric acoustic array.- JASA, 1963, Vol.35, №4, p.535-537.
Изобретение относится к области гидроакустики и может быть использовано в рыбной промышленности для отвлечения и отпугивания морских млекопитающих (ММ) от орудии лова с рыбой. Технический результат, достигаемый изобретением, заключается в формировании и излучении гидроакустических информационных и энергетических сигналов для эффективного и длительного управления поведением ММ (включая ММ, не имеющих естественных хищников) в большом объеме водной среды при промысле рыбы в диапазоне частот, ограниченном диапазоном частот наибольшей акустической чувствительности рыб - объекта промысла. Для этого предложен способ, согласно которому в процессе перемещения рыбопромыслового судна в районе промысла или в период постановки орудий лова в блоке формирования информационных сигналов канала формирования и излучения информационных сигналов осуществляется формирование информационных сигналов, аналогичных гидроакустическим сигналам, излучаемым выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами. Одновременно с этим вдали от места установки орудия лова, в толще воды на различных горизонтах устанавливается и приводится в рабочее состояние путем включения электрического питания несколько автономных морских систем. Одновременно с этим при помощи подводной лампы осуществляется излучение световых сигналов по программе, заданной блоком формирования, и усиления информационных сигналов. Гидроакустические информационные сигналы и световые сигналы воздействуют на ММ и изменяют их поведенческие характеристики. 7 ил.
Способ управления поведением морских млекопитающих в процессе промысла рыбы, основанный на формировании, усилении и излучении информационных и энергетических сигналов, воздействии информационных и энергетических сигналов на морских млекопитающих и изменении их поведенческих характеристик; в качестве информационных сигналов используются гидроакустические сигналы, излучаемые выборочными устройствами, излучение информационных сигналов осуществляется непрерывно в период движения судна и в период постановки орудий лова в море, а энергетические сигналы излучаются в период подъема орудий лова на борт рыбопромыслового судна при помощи пространственно разнесенных нескольких гидроакустических излучателей; в период подъема орудий лова на борт рыбопромыслового судна информационные сигналы не излучаются, а энергетические сигналы излучаются непрерывно и маскируют гидроакустические сигналы, излучаемые выборочными устройствами; частотный диапазон информационных и энергетических сигналов ограничен снизу верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла, отличающийся тем, что в качестве информационных сигналов используются гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами; в качестве энергетических сигналов используются широкополосные гидроакустические сигналы, излучаемые в период подъема орудий лова на борт рыбопромыслового судна при помощи пространственно разнесенных нескольких ненаправленных широкополосных гидроакустических излучателей и маскирующих гидроакустические сигналы, излучаемые выбираемыми орудиями лова, корпусом рыбопромыслового судна, а также судовыми системами и механизмами, в том числе и выборочными устройствами, а также два тональных гидроакустических сигнала ультразвукового диапазона частот на близких частотах, излучаемых в сторону морских млекопитающих - объекта управления, в диапазоне частот максимальной акустической чувствительности морских млекопитающих при помощи направленного излучателя ультразвукового диапазона частот, при этом разностная частота двух тональных гидроакустических сигналов ультразвукового диапазона частот находится в инфразвуковом диапазоне частот, воздействует на внутренние органы морских млекопитающих и дополнительно изменяет их поведенческие характеристики; дополнительно, в момент выборки орудий лова, с помощью ненаправленного гидроакустического излучателя широкополосных гидроакустических сигналов и с помощью подводной лампы соответственно излучаются информационные гидроакустические сигналы и световые сигналы при помощи нескольких автономных приборов, расположенных в толще воды на значительном удалении от рыбопромыслового судна.
| RU 2002104655 А, 10.09.2003 | |||
| СПОСОБ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ МОРСКИХ ЖИВОТНЫХ В ПРОЦЕССЕ ПРОМЫСЛА РЫБЫ | 2002 |
|
RU2213357C1 |
| СПОСОБ ЗАЩИТЫ МОРСКИХ МЛЕКОПИТАЮЩИХ ПОДСЕМЕЙСТВА ДЕЛЬФИНОВЫХ ОТ ОРУДИЙ ЛОВА РЫБЫ | 2000 |
|
RU2171030C1 |
| RU 2075295 С1, 20.03.1997 | |||
| СПОСОБ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ МОРСКИХ ЖИВОТНЫХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2021721C1 |
| US 5349774 А, 27.09.1994 | |||
| US 5117572 А, 05.06.1992 | |||
| US 5417006 А, 23.05.1995. | |||

