Изобретение относится к области гидроакустики и может быть использовано в рыбной промышленности для "дезориентации" морских млекопитающих (ММ), не имеющих в природе естественных хищников (косаток - Orcinus orca) во время выборки судном орудия лова с рыбой и в районе промысла в целом.
Задача, которая решается изобретением, заключается в формировании, усилении и излучении гидроакустических информационных и энергетических сигналов, формировании и излучении световых и цветовых сигналов, а также выполнении специальных действий, направленных на уменьшение "заметности" по гидроакустическим, световым и цветовым сигналам "рабочих" орудий лова и умышленную "демаскировку" по данным сигналам "фальшивых" (без "наживы" на крючках) орудий лова - для эффективного и длительного управления поведением косаток - Orcinus orca в большом объеме водной среды в процессе промысла рыбы в диапазоне частот, ограниченном диапазоном частот наибольшей акустической чувствительности рыб - объекта промысла.
Способ реализуется следующим образом.
Рыбопромысловое судно, имеющее: подруливающее устройство (ПУ), главный двигатель (ГД) с винтом регулируемого шага (ВРШ), руль, выборочное устройство (ВУ), прожектора и осветительные лампы, прибывает в район промысла рыбы при наличии в нем ММ, не имеющих в природе естественных хищников (косаток - Orcinus orca), и в светлое время суток начинает выставлять "рабочие" орудия лова, каждое из которых содержит: с одной его стороны притоптанный на глубину не менее ˜100 м "маркерный" буй сине-зеленого цвета (малозаметный для ММ), укороченный буйреп, гидроакустический размыкатель с дистанционным управлением (ГАРД), необходимый запас фала, хребтину с поводцами (линь с крючком и наживой) и грузами, а также "фальшивые" орудия лова, каждое из которых содержит: маркерный буй красного (хорошо заметного для ММ) цвета со светоотражающим покрытием, веху с проблесковым маяком, буйреп и якорь.
При этом в окружающую (водную и воздушную) среду будут излучаться следующие, "потенциально привлекательные" для ММ, сигналы: подводные шумы (акустические и гидродинамические) рыбопромыслового судна в момент постановки орудий лова; относительно высокочастотные (ВЧ) гидроакустические сигналы на частоте F*3, излучаемые укороченным буйрепом "рабочего" орудия лова; относительно ВЧ гидроакустические сигналы на частоте F- 3, излучаемые буйрепом "фальшивого" орудия лова; световые сигналы №2 - излучаемые проблесковым маяком, находящимся на вехе "фальшивого" орудия лова и хорошо видимые в темное время суток; световые сигналы №3 - переизлученные "маркерным" буем "фальшивого" орудия лова, за счет наличия на его поверхности светоотражающего покрытия, от прожекторов и осветительных ламп рыбопромыслового судна и хорошо видимые на поверхности моря в темное время суток; цветовой (красный и др.) сигнал - цвет "маркерного" буя "фальшивого" орудия лова хорошо видимый на поверхности моря в светлое время суток; цветовой (сине-зеленый) сигнал - цвет "маркерного" буя "рабочего" орудия лова плохо видимый в толще воды в любое время суток.
Таким образом, для уменьшения "привлекательности" для ММ светового сигнала №3, а также цветового сигнала, "маркерный" буй с ГАРД и необходимым запасом фала притапливается при постановке "рабочего" орудия лова на глубину не менее 100 м.
Морские млекопитающие, исходя из выработанного ранее условного рефлекса, начинают осуществлять поиск выставленных орудий лова с использованием первичного (подводные шумы рыбопромыслового судна в момент постановки орудий лова, относительно ВЧ гидроакустические сигналы на частоте F3, излучаемые буйрепом, сигналы "биологического устройства звукоподводной связи" - обмен информацией между ММ и др.) и вторичного (эхо-сигналы "биологического гидролокатора" ММ, отраженные от буйрепа, "маркерного" буя и др.) акустического полей, а также визуально (световые сигналы №2 - излучаемые проблесковым маяком, находящимся на вехе орудия лова и хорошо видимые в темное время суток; световые сигналы №3 - переизлученные "маркерным" буем, за счет наличия на его поверхности светоотражающего покрытия, от прожекторов и осветительных ламп судна и хорошо видимые на поверхности моря в темное время суток; цветовой сигнал - цвет "маркерного" буя, хорошо видимый на поверхности моря в светлое время суток и др.).
При этом уже на этом этапе ММ будут дезориентированы, у них начнется процесс торможения выработанного ранее условного рефлекса.
После этого включаются в работу подсистема формирования, усиления и излучения относительно ВЧ гидроакустических сигналов на частоте F/ 3 и подсистема формирования, усиления и излучения относительно широкополосных гидроакустических сигналов на частоте F/ 4 системы формирования, усиления и излучения энергетических сигналов бортовой аппаратуры рыбопромыслового судна. При этом в подсистеме с помощью последовательно электрически соединенных генератора сигналов на частоте F/ 3 и усилителя мощности осуществляется формирование и усиление до необходимого уровня относительно ВЧ гидроакустических сигналов на частоте F/ 3. С помощью коммутатора осуществляется подключение выхода усилителя мощности к слабонаправленному гидроакустическому преобразователю, расположенному под ВУ ниже ватерлинии "рабочего" борта рыбопромыслового судна. При помощи слабонаправленного гидроакустического преобразователя осуществляется излучение относительно ВЧ гидроакустических сигналов на частоте F/ 3, полностью перекрывающих по уровню и частоте относительно ВЧ гидроакустические сигналы на частоте F3, излучаемые буйрепом с орудием лова, в том числе, относительно ВЧ гидроакустические сигналы на частоте F* 3, излучаемые укороченным буйрепом "рабочего" орудия лова.
При этом в подсистеме с помощью последовательно электрически соединенных генератора относительно широкополосных гидроакустических сигналов на частоте F/ 4 и усилителя мощности осуществляется формирование и усиление до необходимого уровня относительно широкополосных гидроакустических сигналов на частоте F/ 4. С помощью коммутатора осуществляется подключение выхода усилителя мощности к слабонаправленному гидроакустическому преобразователю, расположенному под ВУ ниже ватерлинии "рабочего" борта рыбопромыслового судна. При помощи слабонаправленного гидроакустического преобразователя осуществляется излучение относительно широкополосных гидроакустических сигналов на частоте F/ 4, полностью перекрывающих по уровню и частоте относительно широкополосные гидроакустические сигналы на частоте F4, излучаемые выбираемым орудием лова с рыбой: "хребтина", поводцы и груза.
Выборка "рабочих" орудий лова осуществляется, по возможности, в светлое время суток. Во время подхода к "рабочему" орудию лова в темное время суток все прожектора и осветительные лампы рыбопромыслового судна отключаются. При этом, для уменьшения уровня относительно широкополосных гидродинамических сигналов на частоте F5, ГТУ рыбопромыслового судна включается на минимальном уровне мощности, а для уменьшения уровня широкополосных гидродинамических сигналов на частоте F6, рыбопромысловое судно при подходе к расчетной точке нахождения буя совершает плавную циркуляцию, а инерцию "гасит" на минимальной скорости ВРШ ГД и перекладкой руля на соответствующий угол.
После подхода к расчетной точке постановке буя на судне в подсистеме формирования, усиления и излучения гидроакустических сигналов управления в импульсном режиме на частоте F7 системы формирования, усиления и излучения информационных сигналов на генераторе кодированных сигналов управления осуществляется набор кода, соответствующий коду ГАРД, находящемуся на выбираемом "рабочем" орудии лова. С выхода генератора соответствующий сигнал управления в импульсном режиме на частоте F7 подается на вход усилителя мощности. При помощи коммутатора выход усилителя мощности подключается к тому или иному (в зависимости от обстановки) гидроакустическому преобразователю. При этом происходит излучение гидроакустических сигналов управления в импульсном режиме на частоте F7 с высокой помехоустойчивостью и помехозащищенностью, в том числе, в направлении ГАРД "рабочего" орудия лова.
В случае совпадения кода, установленного в генераторе кодированных сигналов управления и в ГАРД, срабатывает механический замок ГАРД и буй "рабочего" орудия лова, благодаря своей плавучести и запасу фала, начинает всплывать на поверхность моря.
После всплытия на поверхность моря буя "рабочего" орудия лова включается в работу подсистема формирования, усиления и излучения относительно НЧ гидроакустических сигналов на частоте F/ 1 системы формирования, усиления и излучения энергетических сигналов бортовой аппаратуры рыбопромыслового судна.
При этом в подсистеме с помощью последовательно электрически соединенных генератора сигналов на частоте F/ 1 и усилителя мощности осуществляется формирование и усиление до необходимого уровня относительно НЧ гидроакустических сигналов на частоте F/ 1. С помощью коммутатора осуществляется подключение выхода усилителя мощности к пространственно разнесенным по судну и опускаемым на различную глубину при помощи кабель-тросов нескольким относительно НЧ гидроакустическим излучателям. При помощи излучателей осуществляется излучение относительно НЧ гидроакустических сигналов на частоте F/ 1, полностью перекрывающих по уровню и частоте относительно НЧ гидроакустические сигналы на частоте F1, излучаемые ВУ рыбопромыслового судна.
На этом этапе ММ будут также дезориентированы и у них продолжится процесс торможения выработанного ранее условного рефлекса. Однако может возникнуть такая ситуация, при которой ММ случайно "вышли" на рыбопромысловое судно, занятое выборкой "рабочего" орудия лова с рыбой, во время своей миграции по району обитания.
В этом случае включается в работу подсистема формирования, усиления и излучения гидроакустических сигналов на частоте F/ 2 УЗД частот системы формирования, усиления и излучения энергетических сигналов бортовой аппаратуры рыбопромыслового судна. При этом в подсистеме с помощью последовательно электрически соединенных многоканального (по числу гидроакустических преобразователей) генератора сигналов на частоте F/ 2, многоканального усилителя мощности и несколько гидроакустических преобразователей УЗД, расположенных под ВУ ниже ватерлинии "рабочего" борта рыбопромыслового судна осуществляется направленное в секторе ±45° - в горизонтальной плоскости и в секторе ±60° - в вертикальной плоскости вдоль выбираемого "рабочего" орудия лова излучение сигнала УЗД на частоте F/ 2, полностью перекрывающих по уровню и частоте гидроакустические сигналы на частоте F2 УЗД - диапазон частот максимальной акустической чувствительности ММ: в диапазонах частот работы их "биологического гидролокатора" и "биологического устройства связи".
В этом случае ММ не смогут с помощью своего "биологического гидролокатора" обнаруживать рыбу, как находящуюся в выбираемом "рабочем" орудии лова, так и в толще воды, а также сообщать об этом по гидроакустическому каналу "связи" своим сородичам, находящимся в другом районе. В результате ММ просто вынуждены будут отойти от рыбопромыслового судна на "безопасное" (когда смогут нормально функционировать "биологический гидролокатор" и "биологическое устройство звукоподводной связи") расстояние.
Таким образом поэтапно осуществляется процесс эффективного управления поведением ММ, не имеющих в природе естественных хищников (косаток - Orcinus orca}, во время выборки судном орудия лова с рыбой на большой акватории района промысла.
Известен способ управления поведением ММ, основанный на формировании, усилении и излучении энергетических сигналов, воздействии энергетических сигналов на морских ММ и изменении их поведенческих характеристик /1/.
Основными недостатками данного способа являются:
1. Низкая эффективность управления поведением ММ (косаток - Orcinus orca), не имеющих в природе естественных хищников.
2. Невозможность управления поведением ММ в процессе промысла рыбы из-за "отпугивания" рыб от орудий лова.
3. Недостаточная эффективность процесса управления поведением ММ, из-за относительно быстрой их адаптации к излучаемым сигналам.
4. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ.
Известен способ управления поведением ММ, основанный на формировании, усилении и излучении информационных сигналов, воздействии информационных сигналов на ММ и изменении их поведенческих характеристик /2/. К недостаткам данного способа относятся:
1. Низкая эффективность управления поведением ММ (косаток - Orcinus orca), не имеющих в природе естественных хищников.
2. Невозможность управления поведением ММ в процессе промысла рыбы из-за "отпугивания" рыб от орудий лова.
3. Недостаточная эффективность процесса управления поведением ММ из-за быстрой их адаптации к излучаемым сигналам "хищника".
4. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ.
Известен способ управления поведением ММ при промысле рыбы, основанный на формировании, усилении, излучении и воздействии информационных сигналов на ММ и изменении их поведенческих характеристик, при этом в качестве информационных сигналов используются сигналы "конкурента" и сигналы "жертвы", модулированные доплеровскими сигналами, имитирующими движение "конкурента" и "жертвы", информационные сигналы излучаются в течение определенных интервалов времени, а их диапазон ограничен граничной частотой диапазона частот наибольшей акустической чувствительности рыб - объекта промысла /3/.
К недостаткам данного способа относятся:
1.Недостаточная эффективность управления поведением ММ (косаток - Orcinus orca), не имеющих в природе естественных хищников.
2. Недостаточная эффективность процесса управления поведением ММ из-за быстрой их адаптации к излучаемым сигналам.
3. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ.
Наиболее близким по технической сущности к заявляемому относится способ, выбранный в качестве способа-прототипа, управления поведением MM в процессе промысла рыбы, основанный на формировании, усилении и излучении информационных и энергетических сигналов, при этом частотный диапазон информационных и энергетических сигналов ограничен снизу верхней граничной частотой F0 диапазона частот наибольшей акустической чувствительности рыб - объекта промысла; воздействии информационных и энергетических сигналов на ММ и изменении их поведенческих характеристик; в качестве информационных сигналов используются относительно низкочастотные гидроакустические сигналы, излучаемые на частоте F1 выборочным устройством судна; излучение информационных сигналов осуществляется непрерывно в период движения судна и в период постановки орудий лова в море, а энергетические сигналы излучаются на частоте F/ 1 в период подъема орудий лова на борт судна при помощи пространственно разнесенных нескольких гидроакустических излучателей; в период подъема орудий лова на борт судна информационные сигналы не излучаются, а энергетические сигналы излучаются непрерывно и перекрывают по уровню и спектру частот гидроакустические сигналы, излучаемые выборочным устройством судна /4/.
К недостаткам способа-прототипа относятся:
1. Недостаточная эффективность управления поведением ММ (косаток - Orcinus orca), не имеющих в природе естественных хищников.
2. Недостаточная эффективность процесса управления поведением ММ из-за быстрой их адаптации к излучаемым сигналам.
3. Ограниченный объем водной среды, в котором осуществляется управление поведением ММ.
Поставленная цель достигается тем, что в способе управления поведением ММ в процессе промысла рыбы, основанном на формировании, усилении и излучении информационных и энергетических сигналов, частотные диапазоны которых ограничены снизу верхней граничной частотой F0 диапазона частот наибольшей акустической чувствительности рыб - объекта промысла, воздействии информационных и энергетических сигналов на ММ и изменении их поведенческих характеристик; при этом в качестве информационных сигналов используются относительно НЧ гидроакустические сигналы на частоте F1, излучаемые ВУ рыбопромыслового судна; излученные энергетические сигналы на частоте F/ 1 полностью перекрывают по уровню и спектру частот гидроакустические сигналы, излучаемые ВУ рыбопромыслового судна; излучение энергетических сигналов производится при помощи пространственно разнесенных нескольких гидроакустических излучателей, дополнительно в качестве информационных сигналов используются: гидроакустические сигналы на частоте F2 УЗД частот в диапазоне частот максимальной акустической чувствительности MM - в диапазонах частот работы их "биологического гидролокатора" и "биологического устройства звукоподводной связи"; относительно ВЧ гидроакустические сигналы на частоте F3, излучаемые буйрепом с орудием лова; относительно широкополосные гидроакустические сигналы на частоте F4, излучаемые выбираемым орудием ("хребтина", поводцы с крючками, груза и т.д.) лова с рыбой; относительно широкополосные гидродинамические сигналы на частоте F5, излучаемые ПУ рыбопромыслового судна во время выборки орудия лова; широкополосные гидродинамические сигналы на частоте F6, излучаемые ВРШ ГД при подходе рыбопромыслового судна к орудию лова и удержанию судна своего местоположения при выборке орудия лова; световые сигналы №1 - постоянно излучаемые в темное время суток прожекторами и осветительными лампами судна; световые сигналы №2 - излучаемые проблесковым маяком, находящимся на вехе орудия лова и хорошо видимые в темное время суток; световые сигналы №3 - переизлученные "маркерным" буем, за счет наличия на его поверхности светоотражающего покрытия, от прожекторов и осветительных ламп рыбопромыслового судна и хорошо видимые на поверхности моря в темное время суток; а также цветовой сигнал - цвет "маркерного" буя, хорошо видимый на поверхности моря в светлое время суток; дополнительно, для уменьшения "заметности" буйрепа с орудием лова, используются: несколько буйрепов без орудия лова, но оснащенные "маркерными" буями со светоотражающими покрытиями и вехами с проблесковыми маяками, несколько ГАРД, устанавливаемые в толще воды совместно со всеми "рабочими" орудиями лова; дополнительно в качестве энергетических сигналов используются: гидроакустические сигналы на частоте F/ 2 УЗД частот, излучаемые направленно: в секторе ±45° - в горизонтальной плоскости и в секторе ±60° - в вертикальной плоскости вдоль буйрепа и хребтины выбираемого орудия лова с помощью нескольких гидроакустических преобразователей, расположенных под ВУ ниже ватерлинии "рабочего" борта промыслового судна; относительно ВЧ гидроакустические сигналы на частоте F/ 3, излучаемые с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта судна; относительно широкополосные гидроакустические сигналы на частоте F/ 4, излучаемые с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта судна; для уменьшения уровня относительно широкополосных гидродинамических сигналов на частоте F5, ПУ промыслового судна включается на минимальном уровне мощности; для уменьшения уровня широкополосных гидродинамических сигналов на частоте F6, промысловое судно при подходе к бую совершает плавную циркуляцию, а инерцию "гасит" на минимальной скорости ВРШ ГД и перекладкой руля на соответствующий угол; для уменьшения "привлекательности" для ММ световых сигналов №1 и №2 - выборка орудий лова осуществляется только в светлое время суток, прожектора и осветительные лампы промыслового судна, а также проблесковый маяк, соответственно, не используются; для уменьшения "привлекательности" для MM светового сигнала №3, а также цветового сигнала, "маркерный" буй с ГАРД и необходимым запасом фала притапливается при постановке орудия лова на глубину не менее 100 м и всплывает по команде, передаваемой с судна по гидроакустическому каналу управления с высокой помехоустойчивостью и помехозащищенностью в импульсном режиме на частоте F7; дополнительно используются специальные сигналы, "демаскирующие" буйреп без орудия лова: относительно ВЧ гидроакустический сигнал на частоте F- 3, излучаемый буйрепом без орудия лова - путем его постановки не ближе 10 км от места постановки буйрепа с орудием лова; световой сигнал, излучаемый проблесковым маяком, находящимся на вехе буйрепа без орудия лова, а также цветовой сигнал - цвет "маркерного" буя, в том числе со светоотражающим материалом.
Для повышения эффективности процесса управления поведением ММ дополнительно в качестве информационных сигналов используются:
- гидроакустические сигналы на частоте F2 УЗД частот в диапазоне частот максимальной акустической чувствительности MM - в диапазонах частот работы их "биологического гидролокатора" и "биологического устройства звукоподводной связи";
- относительно ВЧ гидроакустические сигналы на частоте F3, излучаемые буйрепом с орудием лова;
- относительно широкополосные гидроакустические сигналы на частоте F4, излучаемые выбираемым орудием лова с рыбой;
- относительно широкополосные гидродинамические сигналы на частоте F5, излучаемые ПУ рыбопромыслового судна во время выборки орудия лова;
- широкополосные гидродинамические сигналы на частоте F6, излучаемые ВРШ ГД при подходе рыбопромыслового судна к орудию лова и удержанию судна своего местоположения при выборке орудия лова;
- световые сигналы №1 - постоянно излучаемые в темное время суток прожекторами и осветительными лампами судна;
- световые сигналы №2 - излучаемые проблесковым маяком, находящимся на вехе орудия лова и хорошо видимые в темное время суток;
- световые сигналы №3 - переизлученные "маркерным" буем, за счет наличия на его поверхности светоотражающего покрытия, от прожекторов и осветительных ламп судна и хорошо видимые на поверхности моря в темное время суток;
- цветовой сигнал - цвет "маркерного" буя, хорошо видимый на поверхности моря в светлое время суток;
Для повышения эффективности процесса управления поведением ММ дополнительно, для уменьшения "заметности" буйрепа с орудием лова, используются:
- несколько буйрепов без орудия лова, но оснащенные "маркерными" буями со светоотражающими покрытиями и вехами с проблесковыми маяками;
- несколько ГАРД, устанавливаемые в толще воды совместно со всеми "рабочими" орудиями лова.
Для повышения эффективности процесса управления поведением ММ в качестве энергетических сигналов дополнительно используются:
- гидроакустические сигналы на частоте F/ 2 УЗД частот, излучаемые направленно: в секторе ±45° - в горизонтальной плоскости и в секторе ±60° - в вертикальной плоскости вдоль буйрепа и хребтины выбираемого орудия лова с помощью нескольких гидроакустических преобразователей, расположенных под ВУ ниже ватерлинии "рабочего" борта судна;
- относительно ВЧ гидроакустические сигналы на частоте F/ 3, излучаемые с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта судна;
- относительно широкополосные гидроакустические сигналы на частоте F/ 4, излучаемые с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта рыбопромыслового судна.
Для повышения эффективности процесса управления поведением ММ дополнительно:
- для уменьшения уровня относительно широкополосных гидродинамических сигналов на частоте F5, ПУ рыбопромыслового судна включается на минимальном уровне мощности;
- для уменьшения уровня широкополосных гидродинамических сигналов на частоте F6, судно при подходе к бую совершает плавную циркуляцию, а инерцию "гасит" на минимальной скорости ВРШ ГД и перекладкой руля на соответствующий угол.
Для повышения эффективности процесса управления поведением ММ дополнительно:
- для уменьшения "привлекательности" для ММ световых сигналов №1 и №2 - выборка орудий лова осуществляется только в светлое время суток, прожектора и осветительные лампы судна, а также проблесковый маяк, соответственно, не используются;
- для уменьшения "привлекательности" для ММ светового сигнала №3, а также цветового сигнала, "маркерный" буй с ГАРД и необходимым запасом фала притапливается при постановке орудия лова на глубину не менее 100 м и всплывает по команде, передаваемой с судна по гидроакустическому каналу управления с высокой помехоустойчивостью и помехозащищенностью в импульсном режиме на частоте F7.
Для повышения эффективности процесса управления поведением ММ и увеличения объема водной среды, в котором осуществляется управление поведением ММ, дополнительно используются специальные сигналы, "демаскирующие" буйреп без орудия лова: относительно ВЧ гидроакустический сигнал на частоте F3 -, излучаемый буйрепом без орудия лова - путем его постановки не ближе 10 км от места постановки буйрепа с орудием лова; световой сигнал, излучаемый проблесковым маяком, находящимся на вехе буйрепа без орудия лова, а также цветовой сигнал - цвет "маркерного" буя, в том числе со светоотражающим материалом.
Отличительными признаками заявляемого способа являются:
1. Дополнительно в качестве информационных сигналов используются гидроакустические сигналы на частоте F2 УЗД частот в диапазоне частот максимальной акустической чувствительности MM - в диапазонах частот работы их "биологического гидролокатора" и "биологического устройства звукоподводной связи".
2. Дополнительно в качестве информационных сигналов используются относительно ВЧ гидроакустические сигналы на частоте F3, излучаемые буйрепом с орудием лова.
3. Дополнительно в качестве информационных сигналов используются относительно широкополосные гидроакустические сигналы на частоте F4, излучаемые выбираемым орудием ("хребтина" и т.д.) лова с рыбой.
4. Дополнительно в качестве информационных сигналов используются относительно широкополосные гидродинамические сигналы на частоте F5, излучаемые ПУ во время выборки орудия лова.
5. Дополнительно в качестве информационных сигналов используются широкополосные гидродинамические сигналы на частоте F6, излучаемые ВРШ ГД при подходе рыбопромыслового судна к орудию лова и удержанию судна своего местоположения при выборке орудия лова.
6. Дополнительно в качестве информационных сигналов используются световые сигналы №1 - постоянно излучаемые в темное время суток прожекторами и осветительными лампами судна.
7. Дополнительно в качестве информационных сигналов используются световые сигналы №2 - излучаемые проблесковым маяком, находящимся на вехе орудия лова, и хорошо видимые в темное время суток.
8. Дополнительно в качестве информационных сигналов используются световые сигналы №3 - переизлученные "маркерным" буем, за счет наличия на его поверхности светоотражающего покрытия, от прожекторов и осветительных ламп рыбопромыслового судна и хорошо видимые на поверхности моря в темное время суток.
9. Дополнительно в качестве информационных сигналов используются цветовой сигнал - цвет "маркерного" буя хорошо видимый на поверхности моря в светлое время суток.
10. Дополнительно, для уменьшения "заметности" буйрепа с орудием лова, используются несколько буйрепов без орудия лова, но оснащенные "маркерными" буями со светоотражающими покрытиями и вехами с проблесковыми маяками.
11. Дополнительно, для уменьшения "заметности" буйрепа с орудием лова, используются несколько ГАРД, устанавливаемые в толще воды совместно со всеми "рабочими" орудиями лова.
12. Дополнительно в качестве энергетических сигналов используются гидроакустические сигналы на частоте F/ 2 УЗД частот, излучаемые направленно: в секторе ±45° - в горизонтальной плоскости и в секторе ±60° - в вертикальной плоскости вдоль буйрепа и хребтины выбираемого орудия лова с помощью нескольких гидроакустических преобразователей, расположенных под ВУ ниже ватерлинии "рабочего" борта судна.
13. Дополнительно в качестве энергетических сигналов используются относительно ВЧ гидроакустические сигналы на частоте F'3, излучаемые с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта судна.
14. Дополнительно в качестве энергетических сигналов используются относительно широкополосные гидроакустические сигналы на частоте F/ 4, излучаемые с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта судна.
15. Дополнительно, для уменьшения уровня относительно широкополосных гидродинамических сигналов на частоте F5, ПУ рыбопромыслового судна включается на минимальном уровне мощности.
16. Дополнительно, для уменьшения уровня широкополосных гидродинамических сигналов на частоте F6, судно при подходе к бую совершает плавную циркуляцию, а инерцию "гасит" на минимальной скорости ВРШ ГД и перекладкой руля на соответствующий угол.
17. Дополнительно, для уменьшения "привлекательности" для ММ световых сигналов №1 и №2, выборка орудий лова осуществляется только в светлое время суток, прожектора и осветительные лампы судна, а также проблесковый маяк, соответственно, не используются.
18. Дополнительно, для уменьшения "привлекательности" для ММ светового сигнала №3, а также цветового сигнала, "маркерный" буй с ГАРД и необходимым запасом фала притапливается при постановке орудия лова на глубину не менее 100 м и всплывает по команде, передаваемой с судна по гидроакустическому каналу управления с высокой помехоустойчивостью и помехозащищенностью в импульсном режиме на частоте F7.
19. Дополнительно используются специальные сигналы, "демаскирующие" буйреп без орудия лова: относительно ВЧ гидроакустический сигнал на частоте F3, излучаемый буйрепом без орудия лова - путем его постановки не ближе 10 км от места постановки буйрепа с орудием лова; световой сигнал, излучаемый проблесковым маяком, находящимся на вехе буйрепа без орудия лова, а также цветовой сигнал - цвет "маркерного" буя, в том числе со светоотражающим материалом.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков, показал следующее.
Признак 1 является известным в биоакустике, однако не известно его использование для управления поведением ММ при промысле рыбы.
Признаки 2-10, 12, 15-19 является новыми и неизвестно их использование для управления поведением ММ в процессе промысла рыбы.
Признаки 11, 13 и 14 является хорошо известными новыми и не известно их использование для управления поведением ММ в процессе промысла рыбы. В то же время в прикладной гидроакустике известно использование признака 11 - в системах длительного позиционирования, а в промысловой гидроакустике - его применение для обеспечения сохранности орудий лова от потерь, а признаков 13 и 14 - для "маскировки" подводных шумов одного судна подводными шумами другого типа судна.
Таким образом, наличие новых существенных признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - в течение заданного интервала времени в большом объеме водной среды эффективно управлять поведением косаток - Orcinus orca в процессе промысла рыбы в диапазоне частот, ограниченном снизу верхней граничной частотой F0 диапазона частот наибольшей акустической чувствительности рыб - объекта промысла путем формирования, усиления и излучения гидроакустических информационных и энергетических сигналов; формирования и излучения световых и цветовых сигналов, а также выполнения специальных действий, направленных на уменьшение "заметности" по гидроакустическим, световым и цветовым сигналам "рабочих" орудий лова и умышленную "демаскировку" по данным сигналам "фальшивых" (без "наживы" на крючках) орудий лова.
В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
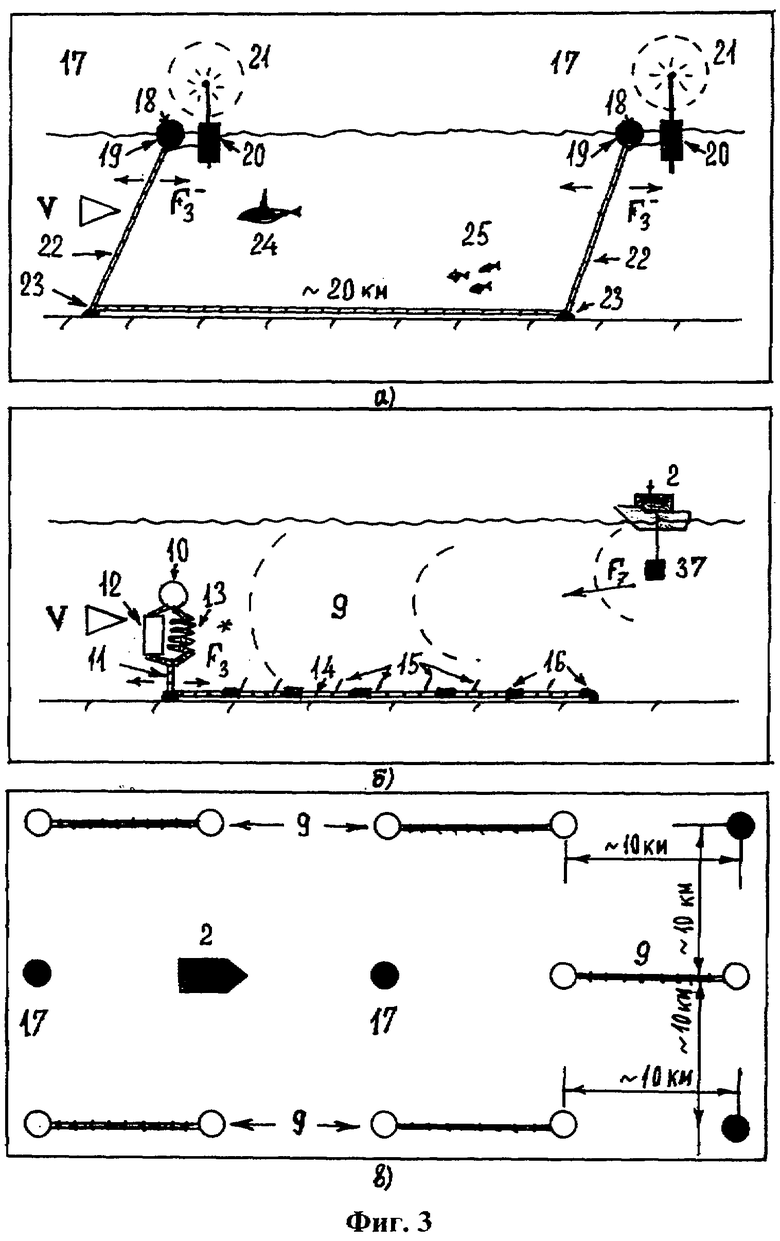
На фиг.1-3 иллюстрируется принцип реализации разработанного способа управления поведением ММ в процессе промысла рыбы.
Устройство содержит бортовую аппаратуру (1), расположенную на рыбопромысловом судне (2), имеющем: ПУ (3), ГД (4) с ВРШ (5), руль (50), ВУ (6), прожектора (7) и осветительные лампы (8); "рабочие" орудия лова (9), каждое из которых содержит: с одной его стороны притопленный на глубину не менее 100 м "маркерный" буй (10) сине-зеленого цвета, укороченный буйреп (11), ГАРД (12), необходимый запас фала (13), хребтину (14) с поводцами (15) и грузами (16); "фальшивые" орудия лова (17), каждое из которых содержит: маркерный буй красного (оранжевого) цвета (18) со светоотражающим покрытием (19), веху (20) с проблесковым маяком (21), буйреп (22) и якорь (23); ММ - объект управления (24) и рыб - объект промысла (25).
Бортовая аппаратура (1) содержит систему формирования, усиления и излучения информационных сигналов (26), а также систему формирования, усиления и излучения энергетических сигналов (27) и коммутатор (28).
При этом система формирования, усиления и излучения информационных сигналов (26) содержит подсистему (29) формирования, усиления и излучения гидроакустических сигналов управления в импульсном режиме на частоте F7, включающую в себя последовательно электрические соединенные генератор кодированных сигналов управления (30) и усилитель мощности (31).
Система формирования, усиления и излучения энергетических сигналов (27) содержит: подсистему (32) формирования, усиления и излучения относительно НЧ гидроакустических сигналов на частоте F/ 1, включающую в себя последовательно электрические соединенные генератор сигналов на частоте F/ 1 (33), усилитель мощности (34), коммутатор (28), пространственно разнесенных по судну (2) и опускаемых на различную глубину при помощи кабель-троссов (36) нескольких относительно НЧ гидроакустических излучателей (37); подсистему (38) формирования, усиления и излучения гидроакустических сигналов на частоте F/ 2 УЗД частот, включающую в себя последовательно электрические соединенные многоканальный (по числу гидроакустических излучателей) генератор сигналов на частоте F/ 2 (39), многоканальный усилитель мощности (40) и несколько гидроакустических преобразователей (41) УЗД, расположенных под ВУ (6) ниже ватерлинии "рабочего" борта рыбопромыслового судна (2), излучаемых направленно: в секторе ±45° - в горизонтальной плоскости и в секторе ±60° - в вертикальной плоскости вдоль выбираемого "рабочего" орудия лова (8) сигнал УЗД на частоте F/ 2; подсистему (42) формирования, усиления и излучения относительно ВЧ гидроакустических сигналов на частоте F/ 3, включающую в себя последовательно электрические соединенные генератор сигналов на частоте F/ 3 (43), усилитель мощности (44), коммутатор (28), слабонаправленный гидроакустический преобразователь (45), расположенный под ВУ (6) ниже ватерлинии "рабочего" борта рыбопромыслового судна (2); подсистему (46) формирования, усиления и излучения относительно широкополосных гидроакустических сигналов на частоте F/ 4, включающую в себя последовательно электрические соединенные генератор сигналов на частоте F/ 4 (47), усилитель мощности (48), коммутатор (28), слабонаправленный гидроакустический преобразователь (49), расположенный под ВУ (6) ниже ватерлинии "рабочего" борта рыбопромыслового судна (2).
Устройство функционирует следующим образом (фиг.1, фиг.2, фиг.3). Рыбопромысловое судно (2), имеющее: ПУ (3), ГД (4) с ВРШ (5), руль (50), ВУ (6), прожектора (7) и осветительные лампы (7), прибывает в район промысла рыбы (25) при наличии в нем ММ (24), не имеющих в природе естественных хищников (косаток - Orcinus orca), и в светлое время суток начинает выставлять "рабочие" орудия лова (9), каждое из которых содержит: с одной его стороны притопленный на глубину не менее 100 м "маркерный" буй (10) сине-зеленого цвета (малозаметный для ММ), укороченный буйреп (11), ГАРД (12), необходимый запас фала (13), хребтину (14) с поводцами (15) и грузами (16) и "фальшивые" орудия лова (17), каждое из которых содержит: маркерный буй красного (хорошо заметного для ММ) цвета (18) со светоотражающим покрытием (19), веху (20) с проблесковым маяком (21), буйреп (22) и якорь (23), например, по схеме, указанной на фиг.3в.
При этом в окружающую (водную и воздушную) среду будут излучаться следующие, "потенциально привлекательные" для ММ сигналы: подводные шумы (акустические и гидродинамические) рыбопромыслового судна в момент постановки орудий лова; относительно ВЧ гидроакустические сигналы на частоте F* 3, излучаемые укороченным буйрепом "рабочего" орудия лова; относительно ВЧ гидроакустические сигналы на частоте F- 3, излучаемые буйрепом "фальшивого" орудия лова; световые сигналы №2 - излучаемые проблесковьм маяком, находящимся на вехе "фальшивого" орудия лова, и хорошо видимые в темное время суток; световые сигналы №3 - переизлученные "маркерным" буем "фальшивого" орудия лова, за счет наличия на его поверхности светоотражающего покрытия, от прожекторов и осветительных ламп рыбопромыслового судна и хорошо видимые на поверхности моря в темное время суток; цветовой (красный и др.) сигнал - цвет "маркерного" буя "фальшивого" орудия лова, хорошо видимый на поверхности моря в светлое время суток; цветовой (сине-зеленый) сигнал - цвет "маркерного" буя "рабочего" орудия лова, плохо видимый в толще воды в любое время суток.
Таким образом, для уменьшения "привлекательности" для ММ светового сигнала №3, а также цветового сигнала, "маркерный" буй (10) с ГАРД (12) и необходимым запасом фала (13) притапливается при постановке "рабочего" орудия лова (9) на глубину не менее 100 м (фиг.3б).
Морские млекопитающие, исходя из выработанного ранее условного рефлекса, начинают осуществлять поиск выставленных орудий лова с использованием первичного (подводные шумы рыбопромыслового судна в момент постановки орудий лова, относительно ВЧ гидроакустические сигналы на частоте F3, излучаемые буйрепом, сигналы "биологического устройства звукоподводной связи" - обмен информацией между ММ и др.) и вторичного (эхо-сигналы "биологического гидролокатора" ММ, отраженные от буйрепа, "маркерного" буя и др.) акустического полей, а также визуально (световые сигналы №2 - излучаемые проблесковым маяком, находящимся на вехе орудия лова, и хорошо видимые в темное время суток; световые сигналы №3 - переизлученные "маркерным" буем, за счет наличия на его поверхности светоотражающего покрытия, от прожекторов и осветительных ламп судна и хорошо видимые на поверхности моря в темное время суток; цветовой сигнал - цвет "маркерного" буя, хорошо видимый на поверхности моря в светлое время суток и др.).
При этом уже на этом этапе ММ будут дезориентированы и у них начнется процесс торможения выработанного ранее условного рефлекса.
Во-первых, они будут длительное время напрасно (без последующего "кормления") "дежурить" у "фальшивых" орудий лова, к которым рыбопромысловые суда будут подходить только кратковременно (и даже специально освещать в темное время суток "маркерные" буи своими прожекторами и осветительными лампами).
Во-вторых, относительно ВЧ гидроакустические сигналы на частоте F* 3, излучаемые укороченным буйрепом "рабочего" орудия лова, существенно отличаются от ВЧ гидроакустических сигналов на частоте F3, ранее излучаемых буйрепом "рабочего" орудия лова и т.д.
После этого включаются в работу подсистема (42) формирования, усиления и излучения относительно ВЧ гидроакустических сигналов на частоте F/ 3 и подсистема (46) формирования, усиления и излучения относительно широкополосных гидроакустических сигналов на частоте F/ 4 системы формирования, усиления и излучения энергетических сигналов (27) бортовой аппаратуры (1) рыбопромыслового судна (2).
При этом в подсистеме (42) с помощью последовательно электрически соединенных генератора сигналов на частоте F/ 3 (43) и усилителя мощности (44) осуществляется формирование и усиление до необходимого уровня относительно ВЧ гидроакустических сигналов на частоте F/ 3. С помощью коммутатора (28) осуществляется подключение выхода усилителя мощности (44) к слабонаправленному гидроакустическому преобразователю (45), расположенному под ВУ (6) ниже ватерлинии "рабочего" борта рыбопромыслового судна (2). При помощи слабонаправленного гидроакустического преобразователя (45) осуществляется излучение относительно ВЧ гидроакустических сигналов на частоте F/ 3, полностью перекрывающих по уровню и частоте относительно ВЧ гидроакустические сигналы на частоте F3, излучаемые буйрепом с орудием лова, в том числе, относительно ВЧ гидроакустические сигналы на частоте F* 3, излучаемые укороченным буйрепом "рабочего" орудия лова.
При этом в подсистеме (46) с помощью последовательно электрически соединенных генератора относительно широкополосных гидроакустических сигналов на частоте F/ 4 и усилителя мощности (48) осуществляется формирование и усиление до необходимого уровня относительно широкополосных гидроакустических сигналов на частоте F/ 4. С помощью коммутатора (28) осуществляется подключение выхода усилителя мощности (48) к слабонаправленному гидроакустическому преобразователю (49), расположенному под ВУ (6) ниже ватерлинии "рабочего" борта рыбопромыслового судна (2). При помощи слабонаправленного гидроакустического преобразователя (49) осуществляется излучение относительно широкополосных гидроакустических сигналов на частоте F/ 4, полностью перекрывающих по уровню и частоте относительно широкополосные гидроакустические сигналы на частоте F4, излучаемые выбираемым орудием лова (9) с рыбой (25) - объектом промысла: "хребтина" (14), поводцы (15), грузы (16).
Выборка "рабочих" орудий лова осуществляется, по возможности, в светлое время суток. Во время подхода к "рабочему" орудию лова в темное время суток все прожектора (7) и осветительные лампы (8) рыбопромыслового судна (2) отключаются. При этом, для уменьшения уровня относительно широкополосных гидродинамических сигналов на частоте F5, ПУ (3) рыбопромыслового судна (2) включается на минимальном уровне мощности, а для уменьшения уровня широкополосных гидродинамических сигналов на частоте F6, рыбопромысловое судно (2) при подходе к расчетной точке нахождения буя (10) совершает плавную циркуляцию, а инерцию "гасит" на минимальной скорости ВРШ (5) главного двигателя (4) и перекладкой руля (50) на соответствующий угол.
После подхода к расчетной точке постановке буя (10) на судне в подсистеме (29) формирования, усиления и излучения гидроакустических сигналов управления в импульсном режиме на частоте F7 системы формирования, усиления и излучения информационных сигналов (26) на генераторе кодированных сигналов управления (30) осуществляется набор кода, соответствующий коду ГАРД (12), находящемуся на выбираемом "рабочем" орудии лова (9). С выхода генератора (30) соответствующий сигнал управления в импульсном режиме на частоте F7 подается на вход усилителя мощности (31). При помощи коммутатора (28) выход усилителя мощности (31) подключается к тому, или иному (в зависимости от конкретной обстановки) гидроакустическому преобразователю: (37), (41), (45) или (49). При этом происходит излучение гидроакустических сигналов управления в импульсном режиме на частоте F7 с высокой помехоустойчивостью и помехозащищенностью, в том числе, в направлении ГАРД (12) "рабочего" орудия лова (9).
В случае совпадения кода, установленного в генераторе кодированных сигналов управления (30) и в ГАРД (12), срабатывает механический замок ГАРД и буй (10) "рабочего" орудия лова (9), благодаря своей плавучести и запасу фала (13), начинает всплывать на поверхность моря.
После всплытия на поверхность моря буя (10) "рабочего" орудия лова (9) включается в работу подсистема (32) формирования, усиления и излучения относительно НЧ гидроакустических сигналов на частоте F/ 1 системы формирования, усиления и излучения энергетических сигналов (27) бортовой аппаратуры (1) рыбопромыслового судна (2).
При этом в подсистеме (32) с помощью последовательно электрически соединенных генератора сигналов на частоте F/ 1 (33) и усилителя мощности (34) осуществляется формирование и усиление до необходимого уровня относительно НЧ гидроакустических сигналов на частоте F/ 1. С помощью коммутатора (28) осуществляется подключение выхода усилителя мощности (34) к пространственно разнесенным по судну (2) и опускаемым на различную глубину при помощи кабель-троссов (36) нескольким относительно НЧ гидроакустическим излучателям (37). При помощи излучателей (37) осуществляется излучение относительно НЧ гидроакустических сигналов на частоте F/ 1, полностью перекрывающих по уровню и частоте относительно НЧ гидроакустические сигналы на частоте F1, излучаемые ВУ (6) рыбопромыслового судна (2).
На этом этапе ММ будут также дезориентированы и у них продолжится процесс торможения выработанного ранее условного рефлекса.
Во-первых, из-за излучения относительно ВЧ гидроакустических сигналов на частоте F/ 3 MM не будут "слышать" относительно ВЧ гидроакустические сигналы на частоте F* 3, излучаемые укороченным буйрепом "рабочего" орудия лова.
Во-вторых, излучения относительно широкополосных гидроакустических сигналов на частоте F/ 4 MM не будут "слышать" широкополосные гидроакустические сигналы на частоте F4, излучаемые выбираемым орудием лова (9) с рыбой (25) - объектом промысла: "хребтина" (14) и т.д.
В-третьих, из-за того что выборка "рабочих" орудий лова осуществляется, по возможности, в светлое время суток, а во время подхода к "рабочему" орудию лова в темное время суток все прожектора (7) и осветительные лампы (8) отключаются, ММ не будут "видеть" судно (2).
В-четвертых, из-за того что при подходе к расчетной точке нахождения буя (10) рыбопромысловое судно (2) совершает плавную циркуляцию, а инерцию "гасит" на минимальной скорости ВРШ (5) ГД (4) и перекладкой руля (50) на соответствующий угол, а также ПУ (3) используется на минимальном уровне мощности, ММ не будут "слышать" момент подхода судна к "рабочему" орудию лова (9).
В-пятых, из-за излучения относительно НЧ гидроакустических сигналов на частоте F/ 1 MM не будут "слышать" относительно НЧ гидроакустические сигналы на частоте F1, излучаемые ВУ (6) судна (2) и т.д.
Однако может возникнуть такая ситуация, при которой ММ случайно "вышли" на рыбопромысловое судно, занятое выборкой "рабочего" орудия лова с рыбой, во время своей миграции по району обитания.
В этом случае включается в работу подсистема (38) формирования, усиления и излучения гидроакустических сигналов на частоте F/ 2 УЗД частот системы формирования, усиления и излучения энергетических сигналов (27) бортовой аппаратуры (1) рыбопромыслового судна (2).
При этом в подсистеме (38) с помощью последовательно электрически соединенных многоканального (по числу гидроакустических преобразователей) генератор сигналов на частоте F/ 2 (39), многоканального усилителя мощности (40) и несколько гидроакустических преобразователей (41) УЗД, расположенных под ВУ (6) ниже ватерлинии "рабочего" борта рыбопромыслового судна (2), осуществляется направленное в секторе ±45° - в горизонтальной плоскости и в секторе ±60° - в вертикальной плоскости вдоль выбираемого рабочего орудия лова (8) излучение сигналов УЗД на частоте F/ 2, полностью перекрывающих по уровню и частоте гидроакустические сигналы на частоте F2 УЗД-диапазон частот максимальной акустической чувствительности ММ: в диапазонах частот работы их "биологического гидролокатора" и "биологического устройства звукоподводной связи".
В этом случае ММ не смогут с помощью своего "биологического гидролокатора" обнаруживать рыбу как находящуюся в выбираемом "рабочем" орудии лова, так и в толще воды, а также сообщать об этом по гидроакустическому каналу "связи" своим сородичам, находящимся в другом районе. В результате ММ просто вынуждены будут отойти от рыбопромыслового судна на "безопасное" (когда смогут нормально функционировать "биологический гидролокатор" и "биологическое устройство звукоподводной связи") расстояние.
Таким образом поэтапно осуществляется процесс эффективного управления поведением ММ, не имеющих в природе естественных хищников (косаток - Orcinus orca) во время выборки судном орудия лова с рыбой на большой акватории района промысла.
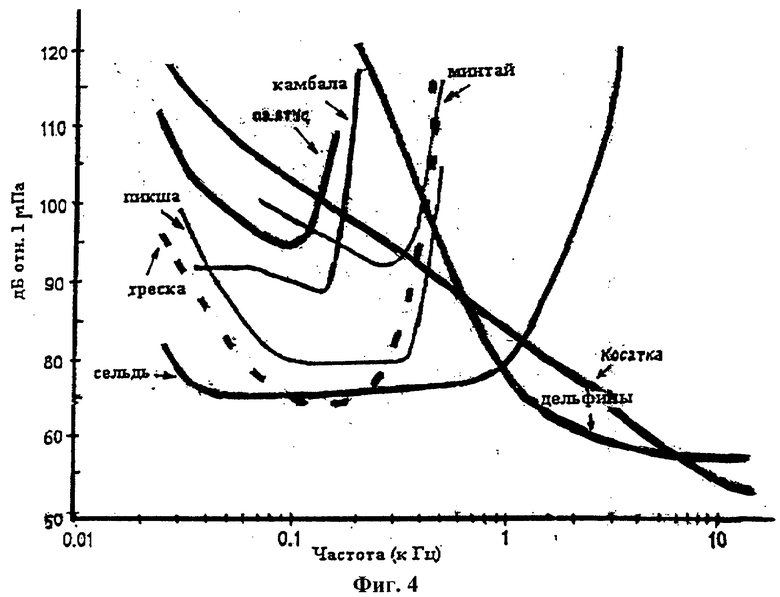
Для примера на фиг.4 представлены диапазоны частот наибольшей акустической чувствительности некоторых промысловых рыб /5, 6/. Как видно из фиг.4 диапазон частот информационных и энергетических сигналов управления поведением ММ при промысле рыбы должен быть ограничен частотами ˜20...30 Гц (снизу) и ˜500...600 Гц (сверху) - для трески, ˜20...30 Гц (снизу) и ˜3 кГц (сверху) - для сельди и т.д.
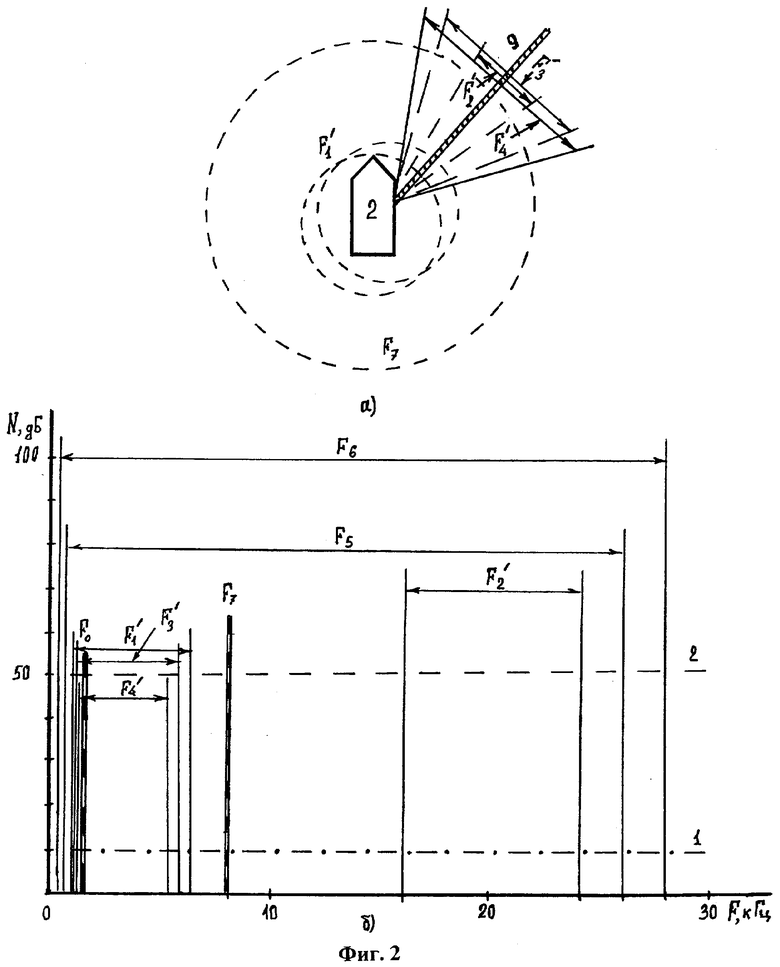
Обращаясь к фиг.2б, можно отметить, что только относительно широкополосные гидродинамические сигналы на частоте F5, обусловленные работой ПУ рыбопромыслового судна, а также широкополосные гидродинамические сигналы на частоте F6, обусловленные работой ВРШ ГД, входят в диапазоны акустической чувствительности указанных на фиг.4 рыб - объекта промысла. При этом линиями №1 и №2 на фиг.2б обозначены уровни шумов моря в диапазоне частот от единиц Гц до ˜30 кГц при волнении 0-0,5 и 6-7 баллов, соответственно.
Здесь же условно показано излучение гидроакустических сигналов управления в импульсном режиме на частоте F7. Несмотря на то, что данная частота "напрямую" не попадает в рабочие диапазоны частот F/ 1, F/ 3 и F/ 4, но благодаря импульсному излучению, а также высокой помехоустойчивости и помехозащищенности, она может излучаться на "свале" амплитудно-частотных характеристик гидроакустических преобразователей, излучающих сигналы на частотах F/ 1, F/ 3 и F/ 4. В этой связи нет необходимости в использовании отдельного гидроакустического преобразователя.
На фиг.4, для примера, приведены также нижние граничные частоты акустической чувствительности некоторых ММ (косатки и дельфина) - объекта управления /7, 8/. Из фиг.4 видно, что у косаток (в отличие от дельфина) нижняя часть диапазона максимальной акустической чувствительности практически полностью перекрывает диапазон максимальной чувствительности рыб - объекта промысла. Это необходимо учитывать при формировании, усилении и излучении информационных и энергетических гидроакустических сигналов управления.
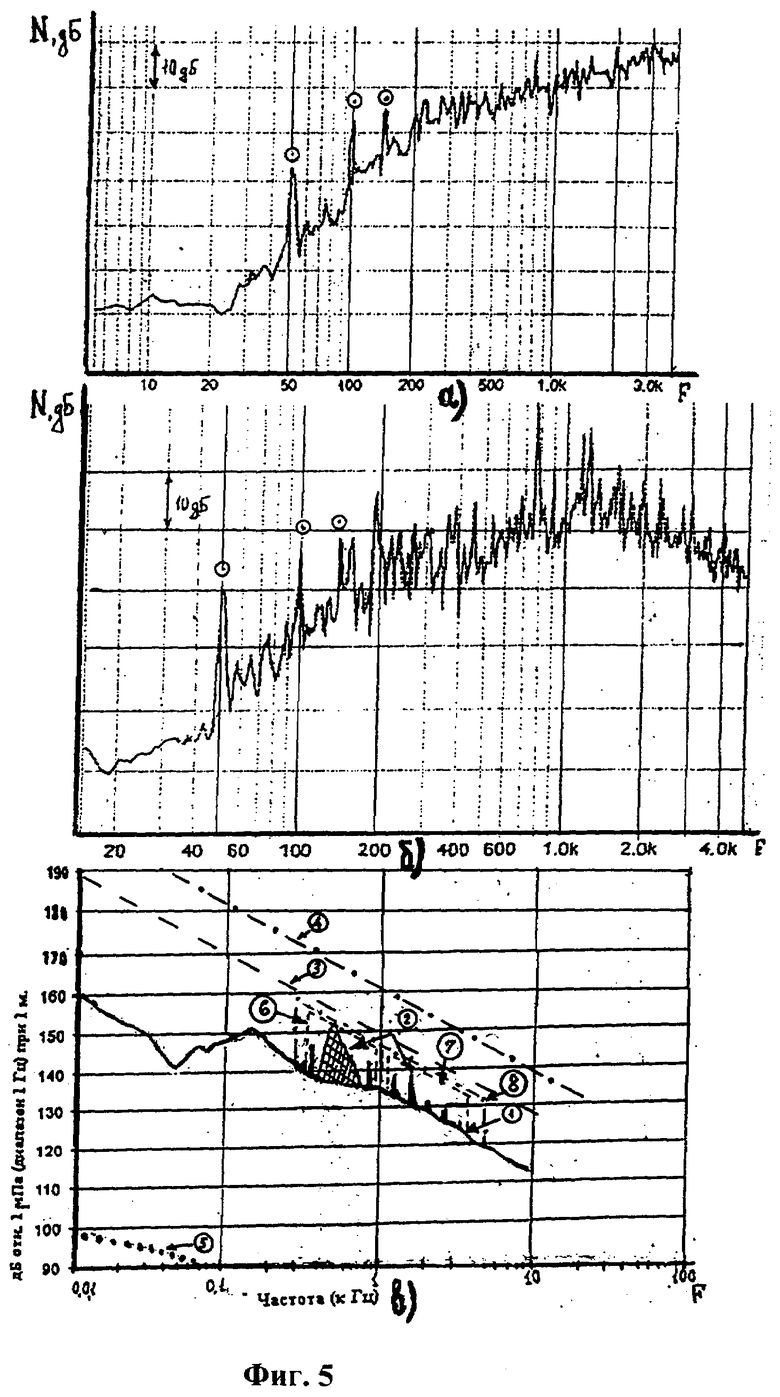
На фиг.5 представлены типовые спектры гидроакустического поля рыбопромыслового судна проекта "503" в момент постановки (фиг.5а, спектрограмма №1 на фиг.5в) и в момент выборки (фиг.5б, спектрограмма №2 на фиг.5в) орудия (ярус) лова. Как видно из фиг.5а и фиг.5б, в обоих случаях в спектрах их гидроакустических полей регистрируются дискретные составляющие (ДС) электрического происхождения с базовой частотой 50 Гц и две ее высшие гармоники (100 и 150 Гц).
В то же время, как видно из фиг.5б и спектрограммы №2 на фиг.5в, при выборке орудия лова на борт рыбопромыслового судна в спектре его гидроакустического поля регистрируется спектральный максимум в диапазоне частот от ˜400 до -700 Гц и большое количество новых ДС в диапазоне частот от -170 до ˜3 кГц (относительно НЧ гидроакустические сигналы на частоте F1, излучаемые ВУ судна; относительно широкополосные гидроакустические сигналы на частоте F4, излучаемые выбираемым орудием лова с рыбой и др.) по амплитуде существенно (˜до 15 дБ) превосходящих сплошную часть спектра.
Спектрограммами №№3, 4 и 5 на фиг.5в обозначены относительно широкополосные гидродинамические сигналы на частоте F5, излучаемые ПУ рыбопромыслового судна во время выборки орудия лова; широкополосные гидродинамические сигналы на частоте F6, излучаемые ВРШ ГД при подходе рыбопромыслового судна к орудию лова и удержании судна своего местоположения при выборке орудия лова, и шумы моря (штиль), соответственно.
Как видно из фиг.5в, уровни относительно широкополосных гидродинамических сигналов на частоте F5 и особенно широкополосных гидродинамических сигналов на частоте F6 существенно (на 10 дБ и более) превосходят уровни подводных акустических полей судна в момент постановки и выборки орудия лова (спектрограммы №№1 и 2 на фиг.5в, соответственно), а также шумы моря (штиль).
На фиг.5в индексами "6", "7" и "8" обозначены типовые спектрограммы гидроакустического поля рыбопромыслового судна при излучении: относительно НЧ гидроакустических энергетических сигналов на частоте F/ 1 (с помощью нескольких пространственно разнесенных гидроакустических излучателей), полностью перекрывающих по уровню и спектру частот относительно НЧ гидроакустические сигналы на частоте F1, излучаемые ВУ рыбопромыслового судна; относительно ВЧ гидроакустических энергетических сигналов на частоте F/ 3 (с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта судна), полностью перекрывающих по уровню и спектру частот относительно ВЧ гидроакустические сигналы на частоте F* 3, излучаемые буйрепом "рабочего" орудия лова, и относительно широкополосных гидроакустических энергетических сигналов на частоте F/ 4 (с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта судна), полностью перекрывающих по уровню и спектру частот относительно широкополосные гидроакустические сигналы - на частоте F4, излучаемые выбираемым орудием лова с рыбой, соответственно.
Как видно из фиг.5в, излучение относительно НЧ (˜300-900 Гц) гидроакустических энергетических сигналов на частоте F/ 1, относительно ВЧ (˜1200-3500 Гц) гидроакустических энергетических сигналов на частоте F/ 3 и относительно широкополосных (˜300-4000 Гц) гидроакустических энергетических сигналов на частоте F/ 4 не приводит к дополнительной "демаскировки" (по отношению к ММ) рыбопромыслового судна, т.к. их уровни и спектры, соответственно, меньше и уже уровней и спектров частот относительно широкополосных гидродинамических сигналов на частоте F5 и особенно широкополосных гидродинамических сигналов на частоте F6 (спектрограммы №№3 и 4 на фиг.5в, соответственно).
В табл.1 и табл.2, а также на фиг.6 и фиг.7 представлены результаты сравнительной оценки эффективности разработанного способа управления поведением ММ в процессе промысла рыбы по сравнению со способом-прототипом. Промысловые испытания проходили на борту ярусоловного морозильного судна (ЯМС) "Калам" ЗАО "АКРОС" (г.П-Камчатский) в период с 10 марта по 10 мая 2004 г. в Охотском море.
В табл.1 приведена условная классификация косаток по результатам личных наблюдений за ММ на борту ЯМС "Калам", а также радиопереговоров с капитанами других судов, осуществляющих промысел палтуса и трески в данном районе с помощью ярусов.
Условная классификация косаток в Охотском море (ЯМС "Калам" и другие суда)
В табл.2 приведена условная классификация косаток по результатам докладов на промысловых советах и радиопереговоров с капитанами других судов, осуществляющих промысел палтуса и трески в данном районе с помощью ярусов.
Условная классификация косаток в Охотском море (различные рыбопромысловые суда)
Анализируя данные, представленные в табл.1 и табл.2, можно сделать вывод о том, что достаточно большое (не менее 300 особей) количество косаток в Охотском море "научилось" питаться с помощью орудий (яруса и др.) лова. При этом косатки существенно отличаются между собой по поведенческим характеристикам, другими словами - находятся на различных уровня "обученности" такому способу "питания".
Например, группа №7 в табл.2, совершенно не подходит к рыбопромысловому судну, легко обнаруживает ярус на дне и "ждет" момент отрыва (при выборке) яруса от грунта на дистанции 7-8 каб. И, наоборот, группы №2 и №6 в табл.1 и группы №5 и №6 в табл.2 - подходят прямо к борту судна, "берут" выбираемый ярус и идут по нему за рыбой, не ныряя на большую глубину. Особенно это касается семей и групп косаток с маленькими особями, т.е. идет активный процесс "обучения" кормления с помощью орудий лова, и взрослые особи "приучают" молодых косаток "не бояться" гидроакустических и гидродинамических шумов рыбопромыслового судна. Есть группы косаток (например, №4 в табл.1, а также №3 и №8 в табл.2), которые самостоятельно обнаруживают маркерный буй с вехой и буйреп "рабочего" орудия лова и "ожидают" около него рыбопромысловое судно. Есть группы "агрессивных" косаток (например, №7 в табл.1 и №5 и №6 в табл.2), которые после "питания" с помощью орудия лова просто "не отпускают" рыбопромысловое судно и длительное время его преследуют на переходах и во время постановки орудий лова (до выхода судна из района традиционного обитания данной группы косаток) и т.д.
Все это необходимо учитывать, в том числе и при реализации разработанного метода управления поведением ММ в процессе промысла рыбы.
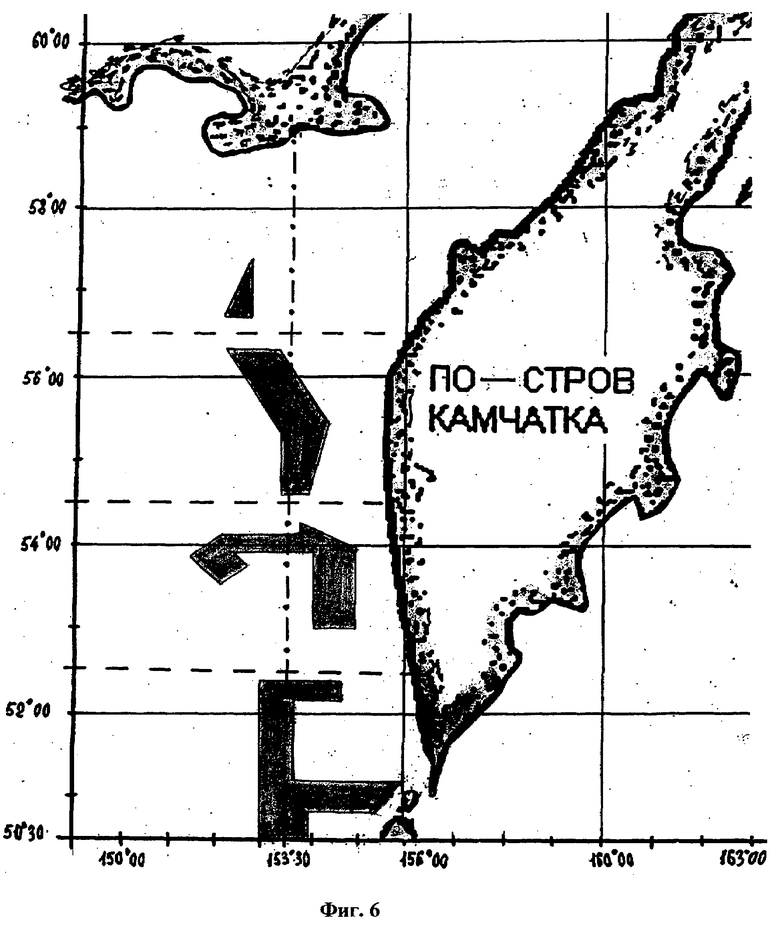
На фиг.6 представлена географическая карта района промысла палтуса и тихоокеанской трески в Охотском море, на которой геометрическими фигурами ("треугольник" и др.) обозначены микрорайоны, в которых косатки осуществляли "нападения" на рыбопромысловые суда в момент выборки ими орудий лова с рыбой. Как видно из фиг.6 ореол распространения косаток, умеющих "питаться" с помощью орудий лова, достаточно (˜7° по широте) широк. При этом отчетливо прослеживаются условные "границы" между всеми 4 микрорайонами обитания косаток.
Данное обстоятельство необходимо учитывать при выборе того, или иного микрорайона промысла рыбы в конкретный временно интервал. Например, в марте 2004 г. случаев "нападения" косаток на суда, занятые промыслом рыбы севернее 54°30/0 с.ш., вообще не отмечалось и т.д.
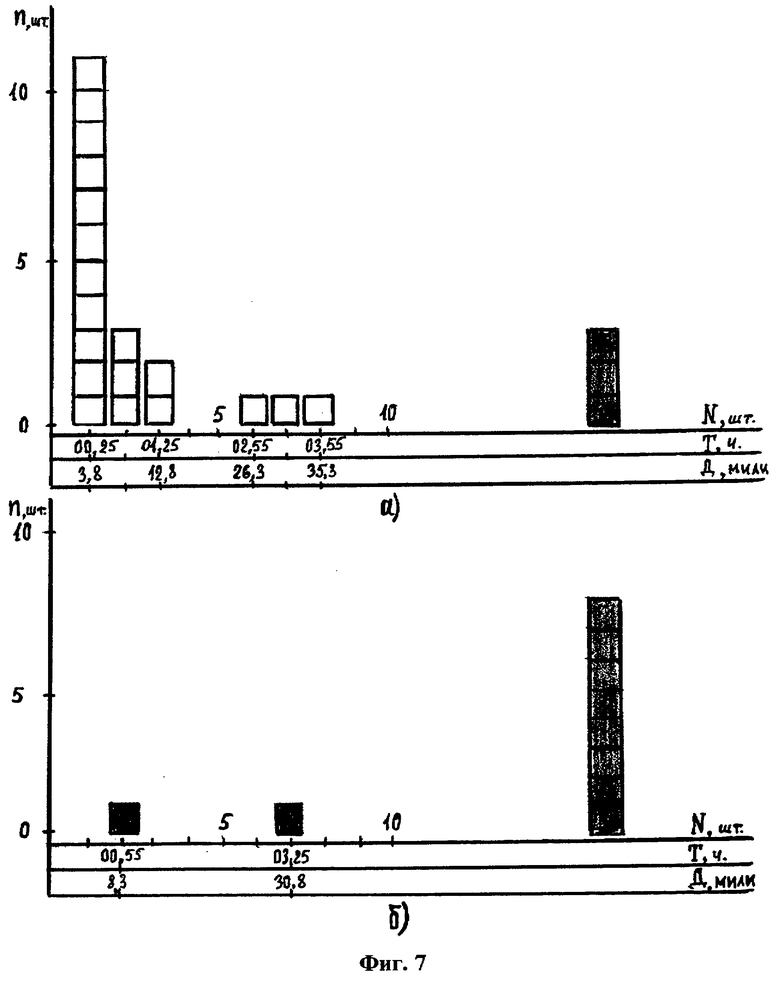
На фиг.7 представлены результаты сравнительной оценки эффективности разработанного способа управления поведением ММ в процессе промысла рыбы (фиг.7б) по сравнению со способом-прототипом (фиг.7а). При этом в качестве частного показателя эффективности использовалось "количество подходов" (n, шт.) косаток к выбираемому ярусу из общего числа выбранных орудий лова (N, шт.) с рыбой. На фиг.7 горизонтальными осями показаны также время подхода косаток к рыбопромысловому судну после начала выборки орудия лова (Т, ч.) и расчетная дистанция (Д, мили) обнаружения косатками судна в момент начала выборки орудия лова с рыбой исходя из скорости движения группы косаток к судну ˜9 узл.
Как видно из фиг.7а, из 22 выбранных орудий лова к 19 шт. (˜86,5%) из них подходили косатки. В то время как при реализации разработанного способа косатки подходили к 2-м из 10 шт. (˜20%) выбранных орудий лова. Вместе с тем необходимо отметить, что подход косаток к выбираемым орудиям лова на 6-8 кассетах (через 02 ч 55 мин-03 ч 55 мин) означает, что они случайно "вышли" на рыбопромысловое судно, занятое выборкой яруса, т.к. расчетные дистанции обнаружения начала выборки орудия лова (26,3-35,3 миль) намного превосходят дальность действия (12-15 миль) "биологического шумопеленгатора" косаток /7, 8/. Поэтому более корректно оперировать с цифрами: 16 подходов косаток из 22 выбранных орудий лова (˜725%) - при реализации способа-прототипа и 1 подход из 10 (˜10%) - при реализации разработанного способа управления поведением ММ в процессе промысла рыбы.
Таким образом, более высокая эффективность по выбранному частному показателю у разработанного способа, по сравнению со способом-прототипом, очевидна.
Однако следует заметить, что ММ используют не только пассивный ("биологический шумопеленгатор"), но и активный ("биологический гидролокатор") гидроакустический канал для поиска (особенно рыб, уже находящихся на крючках орудия лова) и идентификации рыб - объекта питания /6-8/. В этой связи на практике могут возникнуть ситуации, когда ММ случайно (например, в процессе своей естественной миграции и т.д.) приблизятся к рыбопромысловому судну в момент выборки его орудий лова и "увидят" рыбу при помощи своего "биологического гидролокатора" на небольшом (десятки-сотни м) расстоянии от себя, что хорошо видно из фиг.7.
Именно для решения этой задачи в процессе реализации разработанного способа управления поведением ММ предусмотрено излучение гидроакустических энергетических сигналов на частоте F/ 2.
Известно /8/, что максимальная акустическая чувствительность ММ, например, косаток наблюдается в диапазоне частот ˜15 кГц. Поэтому, если излучать гидроакустические сигналы определенной интенсивности именно в этом диапазоне частот, то они также будут оказывать неблагоприятное воздействие ("забивать" приемный канал "биологического гидролокатора" и "биологического устройства звукоподводной связи") на косаток (в данном случае) и ММ со временем покинут эту область водного пространства.
Для примера на фиг.7б заштрихованными "квадратами" показаны временные интервалы (расчетные дистанции обнаружения) подхода косаток к 2-й и 7-й кассетам выбираемого яруса. Однако ММ, из-за направленного излучения гидроакустических сигналов в диапазоне частот 10-20 кГц с помощью 2-х гидроакустических преобразователей, расположенных под ВУ рыбопромыслового судна, не смогли "питаться" рыбой, находящейся на крючках выбираемого "рабочего" орудия лова. При этом косатки, подошедшие ранее к 2-й кассете выбираемого яруса, ушли из района при выборе 8-й кассеты, а косатки, подошедшие ранее к 7-й кассете, находились в районе до конца выбираемого орудия лова, но рыбу, находящуюся на крючках орудия лова практически не трогали. В то время как при реализации способа-прототипа, подошедшие (при выборе любой кассеты яруса) косатки полностью объедали рыбу.
Повышение эффективности процесса управления поведением ММ достигнуто за счет того, что:
- дополнительно, для уменьшения "заметности" буйрепа с орудием лова, использовалось несколько (4 шт.) буйрепов без орудия лова, но оснащенные "маркерными" буями со светоотражающими покрытиями и вехами с проблесковыми маяками;
- несколько (3) ГАРД, устанавливаемых в толще воды совместно со всеми "рабочими" орудиями (3 шт.) лова.
В качестве энергетических сигналов дополнительно использовались:
- гидроакустические сигналы на частоте F/ 2 УЗД частот, излучались направленно: в секторе ±45° - в горизонтальной плоскости и в секторе ±60° - в вертикальной плоскости вдоль буйрепа и хребтины выбираемого орудия лова с помощью нескольких (2-х) гидроакустических преобразователей, расположенных под ВУ ниже ватерлинии "рабочего" борта судна;
- относительно ВЧ гидроакустические сигналы на частоте F/ 3, излучались с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта судна;
- относительно широкополосные гидроакустические сигналы на частоте F/ 4, излучались с помощью слабонаправленного гидроакустического преобразователя, расположенного под ВУ ниже ватерлинии "рабочего" борта рыбопромыслового судна.
Для повышения эффективности процесса управления поведением ММ дополнительно:
- для уменьшения уровня относительно широкополосных гидродинамических сигналов на частоте F5, ПУ рыбопромыслового судна включалось на минимальном уровне мощности;
- для уменьшения уровня широкополосных гидродинамических сигналов на частоте F6, судно при подходе к бую совершало плавную циркуляцию, а инерцию "гасило" на минимальной скорости ВРШ ГД и перекладкой руля на соответствующий угол.
Для повышения эффективности процесса управления поведением ММ дополнительно:
- для уменьшения "привлекательности" для ММ световых сигналов №1 и №2 - выборка орудий лова осуществлялась только в светлое время суток, прожектора и осветительные лампы судна, а также проблесковый маяк, соответственно, не используются;
- для уменьшения "привлекательности" для ММ светового сигнала №3, а также цветового сигнала, "маркерный" буй с ГАРД и необходимым запасом фала притапливался при постановке орудия лова на глубину не менее 100 м и всплывал по команде, передаваемой с судна по гидроакустическому каналу управления с высокой помехоустойчивостью и помехозащищенностью в импульсном режиме на частоте F7.
Для повышения эффективности процесса управления поведением ММ и увеличения объема водной среды, в котором осуществлялось управление поведением ММ, дополнительно использовались специальные сигналы, "демаскирующие" буйреп без орудия лова: относительно ВЧ гидроакустический сигнал на частоте F3, излучаемый буйрепом без орудия лова - путем его постановки не ближе 10 км от места постановки буйрепа с орудием лова; световой сигнал, излучался проблесковым маяком, находящимся на вехе буйрепа без орудия лова, а также цветовой сигнал - цвет "маркерного" буя, в том числе со светоотражающим материалом.
Литература
1. Murchison A.E. and Pepper R.L. Escape conditioning in the bottlenosed dolphin/ Cetology, 1972, №8, pp.1-5.
2. Cummings W.C. and P.O.Thompson, 1971. Gray whales, Eschrichtius robustus, avoid the underwather sounds of killer whales. Fishery Bulletion, v.69, №3, pp.525-530
3. Бахарев С.А. Способ управления поведением морских животных в процессе промысла рыбы. - Патент РФ по заявке №2002102035, 21.01.02 г.
4. Бахарев С.А. Способ управления поведением морских животных при промысле рыбы. - Патент РФ по заявке №2002104655, 20.02.02 г.
5. Сорокин М.А. Слуховые способности некоторых дальневосточных рыб // Автореферат диссертации к.б.н. - М.: ИЭМЭЖ, 1984, 28 с.
6. Шишкова Е.В. Физические основы промысловой гидроакустики. - М.: Пищевая промышленность, 1977, с.233-239.
7. Вуд Ф.Г. Морские млекопитающие и человек / Перевод с английского под ред. А.А.Щербакова. - Л.: Гидрометеоиздат, 1979, 262 с.
8. J.D. Hal, C.S. Johnson Auditory thresholds of a killer whale Orcinus orca Linneaus. - JASA, 1972, v.51. №2, Pt.2, pp.515-517.
Изобретение относится к области гидроакустики и может быть использовано в рыбной промышленности для дезориентации морских млекопитающих. Технический результат заключается в повышении эффективности процесса управления поведением морских млекопитающих (ММ). Способ заключает в том, что осуществляют маскировку низкочастотных (НЧ) гидроакустических сигналов (ГАС) выборочного устройства рыбопромыслового судна, устанавливают по меньшей мере один ложный буйреп с или без орудия лова, который излучает высокочастотные (ВЧ) ГАС, соединенные с вехой и маркерным буем, которые излучают световые сигналы, уменьшают заметность для ММ рабочих орудий лова, уменьшают заметность для ММ рыбопромыслового судна в момент выборки рабочих орудий лова за счет уменьшения широкополосных гидродинамических сигналов (ГДС) подруливающего устройства рыбопромыслового судна и уменьшения широкополосных ГДС винта двигателя рыбопромыслового судна, отключают световые сигналы рыбопромыслового судна, маскируют широкополосные ГАС выбираемого рабочего орудия лова рыбопромыслового судна путем излучения широкополосного ГАС с помощью гидроакустического преобразователя, излучают ГАС ультразвукового диапазона частот с помощью нескольких гидроакустических преобразователей. 7 ил., 2 табл.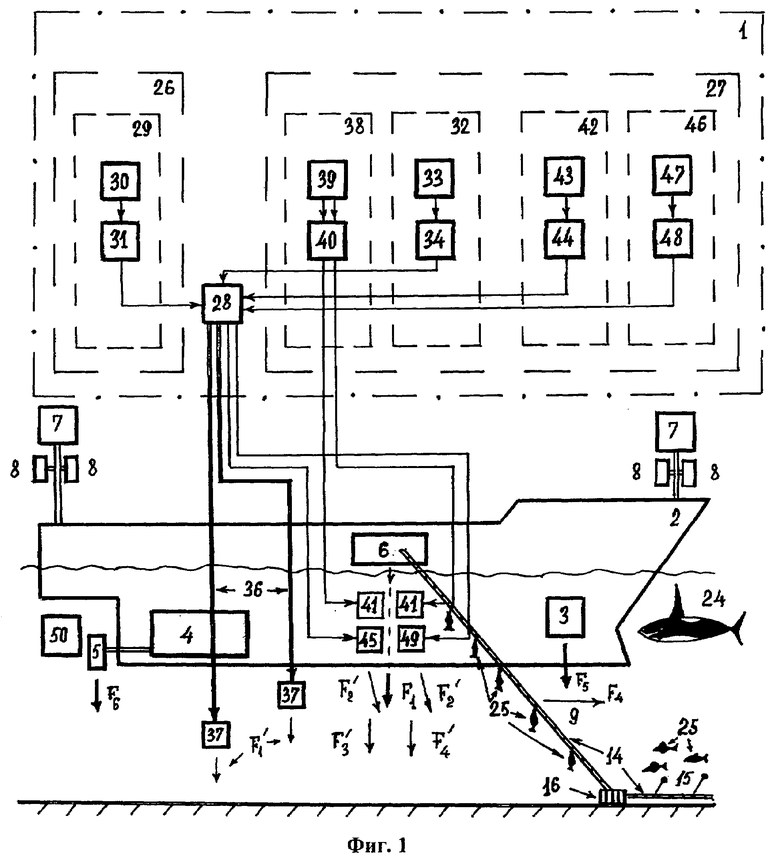
Способ управления поведением морских млекопитающих в процессе промысла рыбы, заключающийся в том, что осуществляют маскировку низкочастотных гидроакустических сигналов выборочного устройства рыбопромыслового судна путем излучения низкочастотного гидроакустического сигнала с помощью пространственно разнесенных нескольких гидроакустических излучателей, отличающийся тем, что дополнительно в процессе промысла рыбы для приманивания морских млекопитающих устанавливают по меньшей мере один ложный буйреп с или без орудия лова, который излучает высокочастотные гидроакустические сигналы, соединенные с вехой и маркерным буем, которые излучают световые сигналы, уменьшают заметность для морских млекопитающих рабочих орудий лова с помощью притапливания на определенную глубину буйрепа с маркерным буем, уменьшают заметность для морских млекопитающих рыбопромыслового судна в момент выборки рабочих орудий лова за счет уменьшения широкополосных гидродинамических сигналов подруливающего устройства рыбопромыслового судна путем включения его на минимальном уровне мощности, уменьшения широкополосных гидродинамических сигналов винта двигателя рыбопромыслового судна путем плавной циркуляции рыбопромыслового судна и перекладкой руля рыбопромыслового судна на соответствующие углы, отключения световых сигналов рыбопромыслового судна, маскировки широкополосных гидроакустических сигналов выбираемого рабочего орудия лова рыбопромыслового судна путем излучения широкополосного гидроакустического сигнала с помощью гидроакустического преобразователя, кроме того, управляют поведением морских млекопитающих излучением гидроакустических сигналов ультразвукового диапазона частот с помощью нескольких гидроакустических преобразователей, что приводит к дезориентации морских млекопитающих, вынуждая их отойти от рыбопромыслового судна, при этом частотные диапазоны излучаемых широкополосных гидродинамических сигналов, широкополосных гидроакустических сигналов и низкочастотных гидроакустических сигналов ограничены снизу верхней граничной частотой диапазона частот наибольшей акустической чувствительности рыб.
| СПОСОБ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ МОРСКИХ ЖИВОТНЫХ ПРИ ПРОМЫСЛЕ РЫБЫ | 2002 |
|
RU2218583C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОВЕДЕНИЕМ МОРСКИХ ЖИВОТНЫХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2021721C1 |
| US 5778591 A, 14.07.1998 | |||
| JP 6217666, 09.08.1994. | |||

