Изобретение относится к военной технике, в частности к зенитным установкам (ЗУ) и вообще к техническим средствам, содержащим поворотную часть, вращаемую силовым следящим приводом с датчиком угла (ДУ) горизонтального наведения (ГН), а также вращающееся электроконтактное устройство (ВКУ), расположенное под центром поворотной части ЗУ и соединяющее электрические и электронные цепи неподвижной части ЗУ с соответствующими цепями поворотной части.
Известна зенитная самоходная установка 2С6М [1], содержащая неподвижную часть, поворотную часть, погон и силовой следящий привод ГН.
ДУ ГН с вращающимся трансформатором установлен на редукторе обкатки и связан с шестерней погона кинематической цепью, содержащей зубчатые передачи. Передаточное отношение этой кинематической цепи не является строго постоянным в процессе вращения поворотной части и изменяется без определенной закономерности в пределах погрешностей кинематической цепи, обусловленных отклонениями размеров и формы зубчатых венцов всех шестерен в пределах допусков, назначаемых по ГОСТ 1643-81. Влияют также радиальные люфты в опорах валов, в погоне и податливость погона при стрельбе.
Таким образом, ДУ отслеживает не действительные угловые перемещения поворотной части (оружия), а неоднозначные, незакономерно изменяющиеся угловые перемещения выходного вала редуктора обкатки относительно поворотной части. В результате, теоретически и практически невозможно никакими мерами полностью исправить погрешности ГН оружия, привносимые неточным механизмом привода ДУ ГН. Точность механизма, приемлемая в общем машиностроении, недостаточна для наведения оружия ЗУ. В этом состоит существенный недостаток зенитной самоходной установки 2С6М, обусловливающий необходимость стрельбы удлиненными очередями с целью достижения приемлемой вероятности поражения цели.
Известна также боевая установка по описанию изобретения к патенту РФ 2180089, действующему с 24.02.2000 г. [2], содержащая неподвижную часть, поворотную (вращающуюся) часть, силовой следящий привод ГН с ДУ (принимающим прибором), установленным на поворотной части установки по геометрической оси ее вращения.
Механический привод ДУ осуществляется напрямую от неподвижной части установки с помощью центральной вертикальной штанги, промежуточного вала, названного в описании обоймой, и трех муфт, из которых верхняя является обычной точной крестовой компенсирующей муфтой.
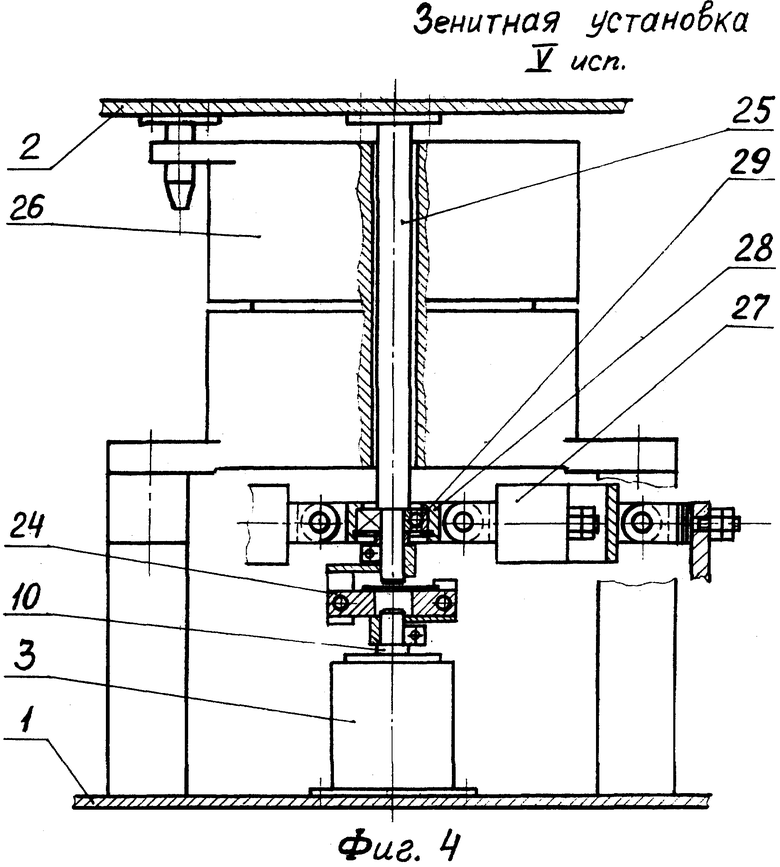
Конструкция точной крестовой компенсирующей муфты показана в осевом разрезе на фиг.4, поз. 24.
Такая муфта имеет промежуточное звено - плавающую крестовину, сочленяющуюся с полумуфтами посредством двух накрест расположенных безлюфтовых прямолинейных возвратно-поступательных кинематических пар. Точная крестовая компенсирующая муфта при малых взаимных перекосах осей полумуфт наиболее точно передает угловые перемещения (положения) от ведущей полумуфты к ведомой полумуфте. А влияние постоянного и переменного взаимных параллельных смещений осей полумуфт на точность передачи угловых перемещений (положений) полностью отсутствует, компенсируется относительными смещениями в накрест расположенных безлюфтовых прямолинейных возвратно-поступательных кинематических парах. С точными крестовыми компенсирующими муфтами по точности передачи угловых перемещений (положений) не могут сравниться никакие другие типы муфт (кроме глухих соединений валов, не приемлемых для механизма привода ДУ ГН).
В приводе ДУ ГН боевой установки по патенту 2180089, кроме верхней, две другие муфты оригинальны по конструкции и, безусловно, уступают по точности муфтам крестовым компенсирующим. (Полумуфты двух оригинальных муфт в описании названы также оригинально: обойма и опора, опора и стакан).
Если изобретатели боевой установки обеспечат безлюфтовую точную передачу угловых положений всеми тремя муфтами, для чего не избежать замены двух оригинальных муфт на точные крестовые компенсирующие муфты, то механизм привода ДУ ГН в этой боевой установке станет весьма точным, но все равно так и не достигнет высших степеней точности.
Эта боевая установка привлекательна тем, что конструкция механизма привода ДУ ГН достаточно проста. Эту боевую установку следует признать прототипом.
Наилучшим усовершенствованием названного прототипа является полное удаление двух неудачных оригинальных муфт и соответствующее повышение точности механизма привода ДУ.
Но боевая установка обладает и еще одним весьма существенным недостатком. Для ее осуществления и производства прежде всего должна быть решена задача подбора или заказа на разработку в другую отрасль специального ВКУ, не только удовлетворяющего электротехническим требованиям, но и имеющего центральное сквозное отверстие для размещения в нем центральной штанги привода ДУ ГН. Подбор ВКУ из имеющейся малочисленной номенклатуры мало вероятен, а заказ на разработку нового специального ВКУ связан с большими затратами и задержкой по времени.
Если вся кинематическая цепь механизма привода ДУ ГН от неподвижной части ЗУ до ротора ДУ имеет только крестовые компенсирующие муфты и более не содержит никаких передач и если каждая муфта находится в одинаковых условиях перекоса полумуфт и привносит, следовательно, одинаковую погрешность в передаче угловых положений, то напрашивается простейшая классификация: степень точности механизма привода ДУ ГН определяется числом муфт (плавающих крестовин) во всей кинематической цепи привода.
Например, если бы в боевой установке по патенту 2180089 все три муфты были бы точные крестовые компенсирующие, то степень точности механизма привода ДУ ГН с пониженного уровня, обусловленного двумя оригинальными, сравнительно пониженной точности муфтами, повысилась бы до третьей степени точности.
Согласно предложенной классификации механизм привода ДУ ГН, содержащий лишь одну точную крестовую компенсирующую муфту (одну плавающую крестовину) и не имеющий никаких других передач, обладает первой - высшей степенью точности, является прецизионным.
Эта классификация механизмов привода ДУ ГН, состоящих только из точных крестовых муфт, вполне приемлема и справедлива: чем больше в кинематической цепи промежуточных звеньев (крестовин), тем больше погрешностей и хуже степень точности и, наоборот, меньше промежуточных звеньев (крестовин), меньше погрешностей и лучше степень точности.
На основе изложенных сведений и рассуждении предлагаемое изобретение при всех десяти его исполнениях решает задачу дальнейшего повышения точности наведения оружия ЗУ за счет достижения первой (высшей прецизионной) и второй степеней точности механизма привода ДУ ГН, для чего одновременно потребовалось при первом и втором исполнениях механизма также необходимое решение задачи конструктивной совместимости механизма привода ДУ ГН с ВКУ вне зависимости от наличия центрального сквозного отверстия во ВКУ.
В результате достижения прецизионной и второй степеней точности механизма привода ДУ ГН становится возможным множественный технический и экономический результат, обеспечиваемый изобретением:
- Отсутствие потребности исправлять погрешности наведения оружия, привносимые неточным механизмом привода ДУ ГН, путем введения в электронную систему ЗУ соответствующих поправок для компенсации названных погрешностей.
- Повышение вероятности поражения атакуемой цели.
- Возможность стрелять укороченными очередями, уменьшение расхода выстрелов, уменьшение объема и массы магазина, момента инерции поворотной части ЗУ и времени ГН.
- Уменьшение перегрева стволов оружия, увеличение их общей наработки и количества выстрелов между заменами изношенных стволов.
- Уменьшение эксплуатационных расходов и получение общего положительного экономического эффекта.
- Повышение в целом качества и конкурентоспособности ЗУ.
Все перечисленные параметры и характеристики ЗУ взаимно и последовательно связаны между собой и все вместе прямо зависят от точности наведения оружия.
Какие бы ни были возражения со стороны баллистики, поправить ее отрицательное влияние на вероятность поражения атакуемой цели - задача отдельная и, хотя бы частично, но решаемая в условиях применения ЗУ на охране стационарных объектов путем введения поправок в электронную систему ЗУ, поступающих от многих размещенных вокруг охраняемого объекта чувствительных метеорологических пунктов, оперативно и подробно следящих за направлением и силой ветров.
Следует признать необходимым стремление к изжитию погрешностей ГН оружия, привносимых несовершенным механизмом привода ДУ ГН. Разработка новейшего поколения ЗУ и модернизация имеющихся старых ЗУ должны обязательно исходить из этого условия, необходимого для дальнейшего выживания ЗУ как вида вооружения.
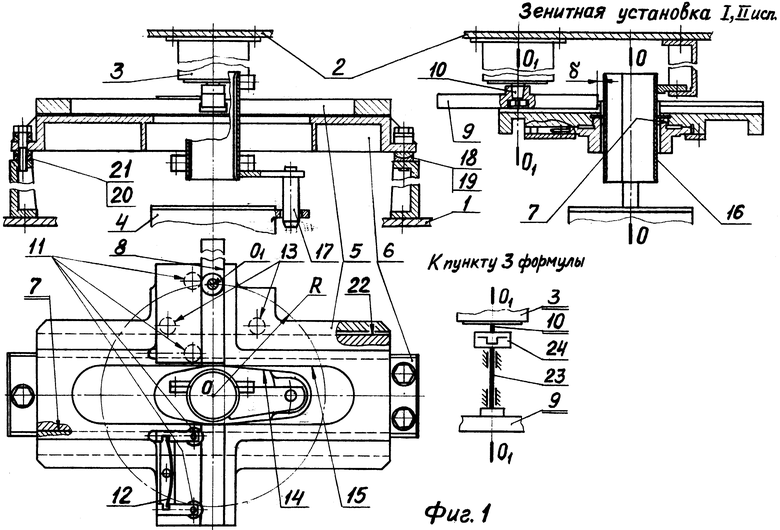
На фиг.1 изображен фрагмент заявляемой ЗУ с первым исполнением механизма привода ДУ ГН, а также со вторым исполнением механизма - к пункту 3 формулы.
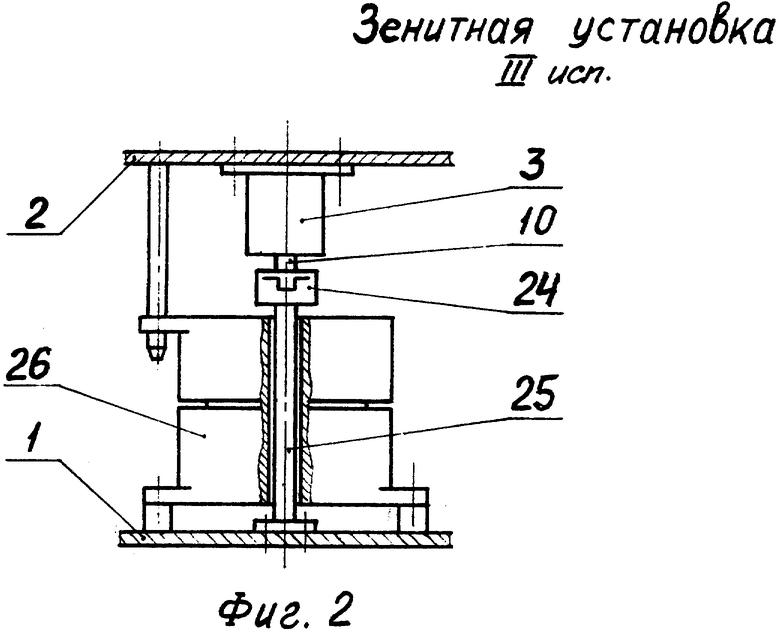
На фиг.2 - фрагмент ЗУ с третьим исполнением механизма привода ДУ ГН.
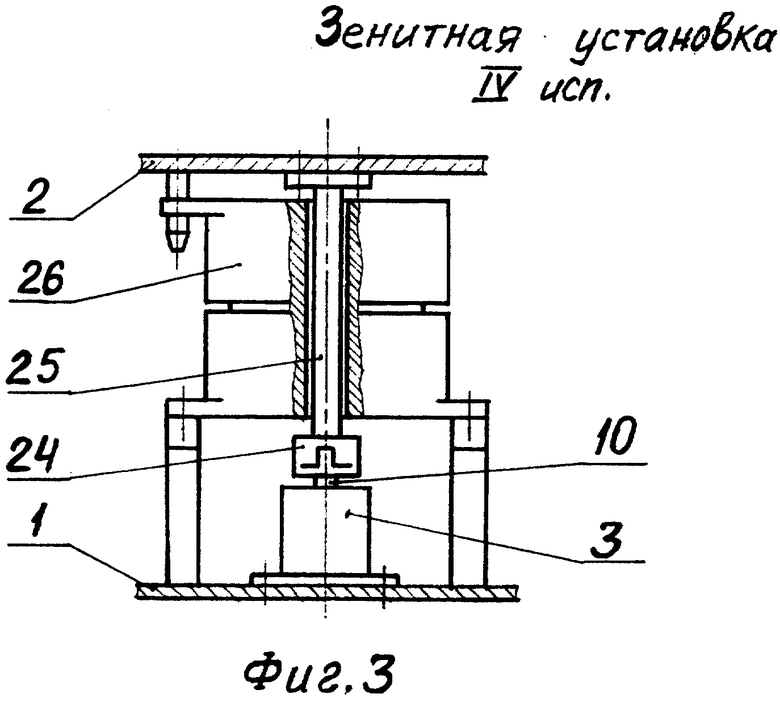
На фиг.3 - фрагмент ЗУ с четвертым исполнением механизма.
На фиг.4 - фрагмент ЗУ с пятым исполнением механизма.
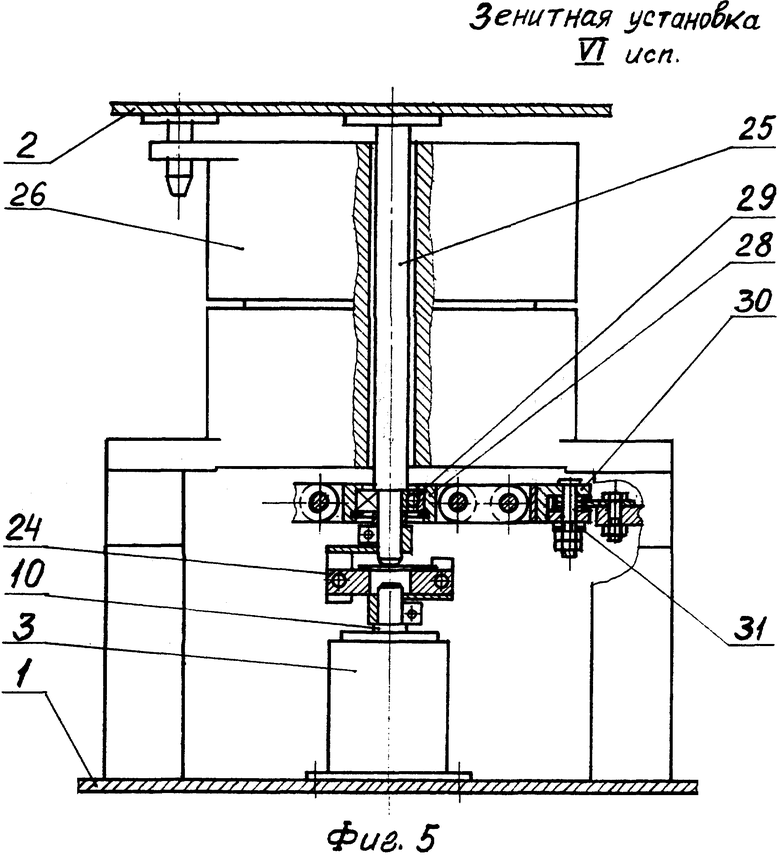
На фиг.5 - фрагмент ЗУ с шестым исполнением механизма.
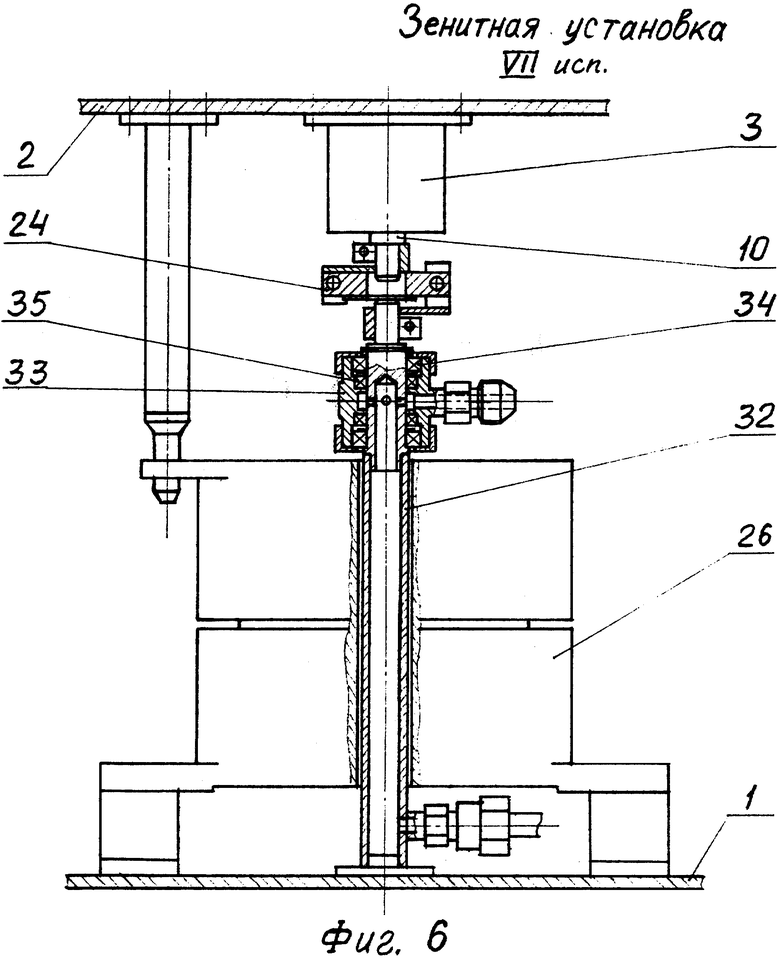
На фиг.6 - фрагмент ЗУ с седьмым исполнением механизма.
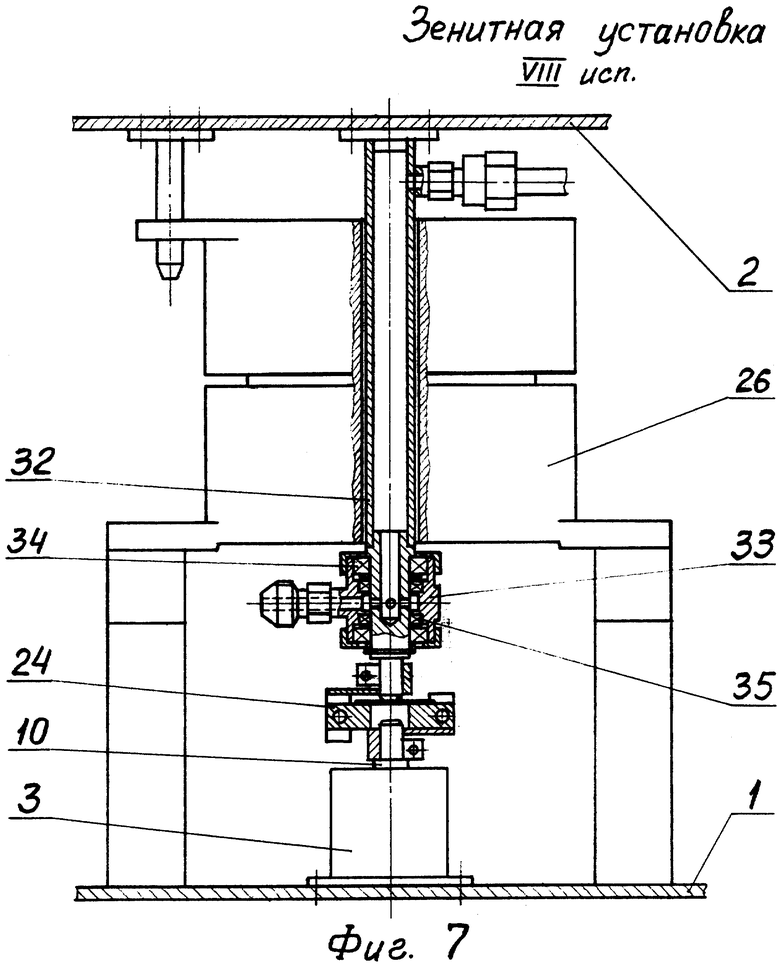
На фиг.7 - фрагмент ЗУ с восьмым исполнением механизма.
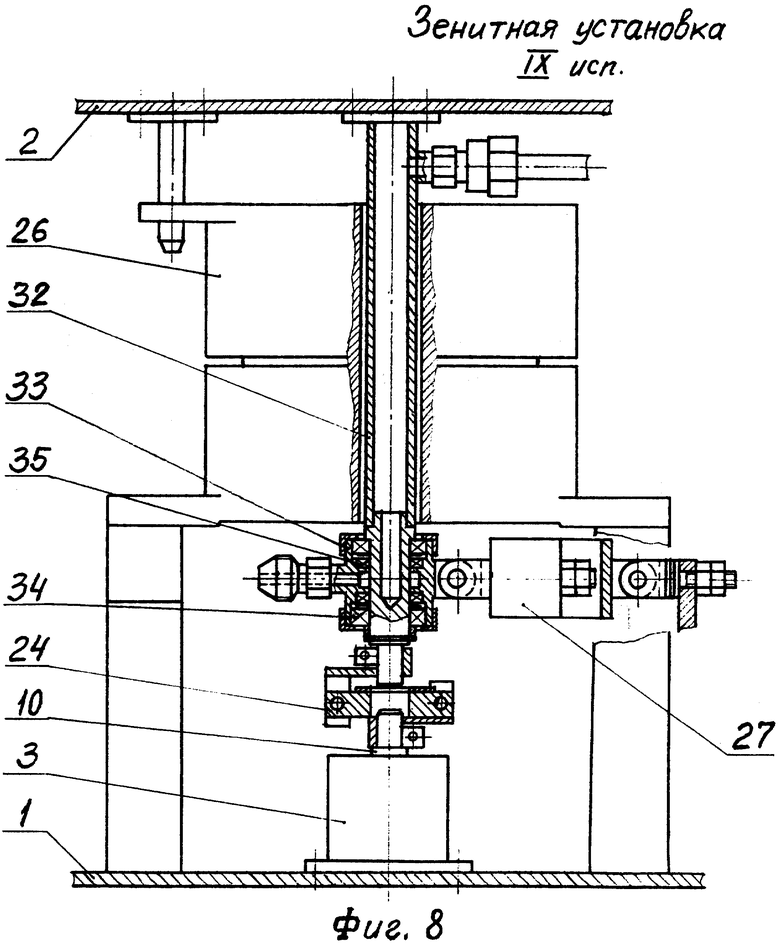
На фиг.8 - фрагмент ЗУ с девятым исполнением механизма.
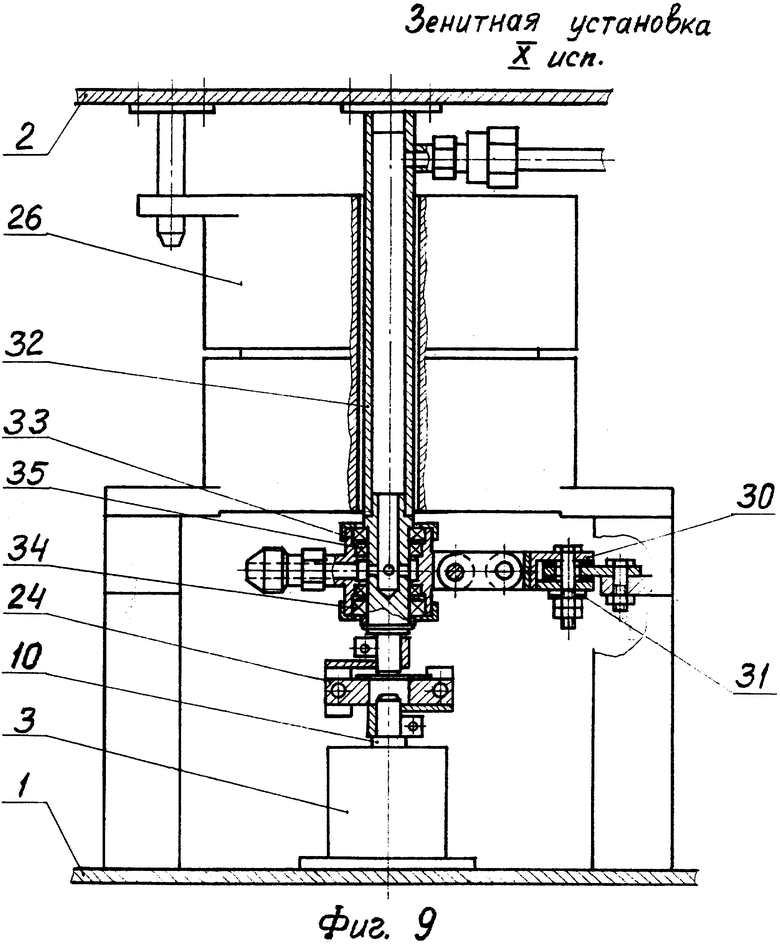
На фиг.9 - фрагмент ЗУ с десятым исполнением механизма.
Предлагаемая ЗУ содержит неподвижную часть 1 (фиг.1), поворотную часть 2, погон, силовой следящий привод ГН, имеющий ДУ 3, прецизионный механизм привода ДУ 3 и ВКУ 4, а также другие необходимые части, не упоминаемые в контексте изобретения.
С целью достижения прецизионной точности прежде всего в механизме привода ДУ 3 исключены зубчатые передачи и содержится только плавающая крестовина 5 с двумя безлюфтовыми накрест расположенными прямолинейными возвратно-поступательными кинематическими парами. Первая из этих кинематических пар есть подвижное сочленение неподвижного основания 6 с направляющей поверхностью 7 крестовины 5, вторая - подвижное сочленение направляющей поверхности 8 крестовины 5 с направляющей планкой 9, неподвижно соединенной с ротором 10 ДУ 3.
Боковые люфты в обеих прямолинейных возвратно-поступательных парах устраняются нажимными роликами 11 и пружинами 12 и аналогично подпружиненными роликами 13. Поэтому угловые перемещения крестовины 5, направляющей планки 9 и ротора 10 ДУ, как и неподвижной части 1 и неподвижного основания 6, всегда точно равны нулю. И, поскольку статор ДУ 3 закреплен на поворотной части 2 и вращается вместе с ней, то ДУ 3 с прецизионной точностью отслеживает угловые перемещения поворотной части 2 (оружия).
Ролики 11 и 13 размещены в выемках в крестовине 5.
Этот механизм с точки зрения теории механизмов и машин по своей структуре, кинематике и точности передачи углового положения от неподвижной части 1 к ротору 10 ДУ ГН не имеет принципиальных различий с точной крестовой компенсирующей муфтой. Имеется лишь конструктивное отличие - смещение оси O1-O1 ведомого звена - ротора 10 ДУ на расстояние R от геометрической оси вращения О-О поворотной части 2.
За счет этого смещения при наличии продолговатых сквозных окон в основании 6 (контур окна 14) и в крестовине 5 (контур окна 15) внутри механизма, вокруг геометрической оси вращения O-O поворотной части 2 образуется свободное пространство, через которое сверху от поворотной части 2 вводится продольно-разъемная труба 16, объединяющая в себе нижние концы кабелей и несущая поводок 17, поворачивающий вращающуюся часть ВКУ 4. Кабельные соединители подводятся к соответствующим блочным соединителям вращающейся части ВКУ 4 (кабели на фиг.1 не показаны).
Тем самым достигается конструктивная совместимость первого исполнения механизма привода ДУ ГН с ВКУ вне зависимости от наличия центрального сквозного отверстия во ВКУ.
На поворотной части 2 снизу крепятся ДУ 3 и продольно-разъемная труба 16.
На неподвижной части 1 крепятся ВКУ 4 и неподвижное основание 6. Чтобы избежать упругих деформаций (коробления) основания 6 при затяжке крепежных болтов, можно рекомендовать простейшие самоустанавливающиеся устройства: на правом конце основания 6 снизу - пару цилиндрических подкладок 18 и 19, сверху - две пары шайб сферических 20 с коническими 21; на левом конце основания 6 - снизу и сверху по паре шайб сферических 20 с коническими 21. На цилиндрические, сферические и конические опорные поверхности деталей 18, 19, 20, 21 перед затяжкой крепежных болтов полезно нанести смазку и затяжку болтов производить поочередно, начиная с правого конца основания 6, постепенно дозируя до полной затяжки.
Направляющая планка 9 вместе с ротором 10 ДУ совершают круговое плоскопараллельное движение при отсутствии угловых перемещений относительно неподвижной части 1. Точка О1, принадлежащая планке 9 и ротору 10 ДУ, на виде в плане (фиг.1), описывает окружность радиуса R с центром в точке О - на геометрической оси вращения поворотной части 2. Направляющая планка 9, не вращаясь, смещается в сторону вместе с крестовиной 5 и обходит стороной продольно-разъемную трубу 16, пересекая при этом окно 15 и смещаясь на другую сторону крестовины 5. На виде в плане планка 9 изображена в крайнем, наиболее смещенном положении относительно крестовины 5 и торец планки 9, не касаясь трубы 16, обходит ее с зазором δ (см. третью проекцию на фиг.1).
С целью обеспечения наибольшей точности и минимальных габаритов механизма следует придерживаться нижеизложенных условий рационального конструирования и последовательности действий:
- Разработка механизма начинается с определения минимального диаметра продольно-разъемной трубы 16, достаточного для укладки внутри нее всех кабелей поворотной части 2.
- Ширина b окон 14 и 15 в основании 6 и в крестовине 5 определяется из условия обеспечения гарантированного зазора с трубой 16 с учетом отклонений влияющих размеров и формы деталей ЗУ, получаемых при изготовлении и сборке, а также влияющих упругих деформаций при стрельбе и транспортировке ЗУ.
- Для определения длины l планки 9 можно рекомендовать формулу:
l=2с-(4...10) мм.
Здесь с=b+16 мм - расстояние между осями 2-го и 3-го нажимных роликов 11. Имеются в виду наиболее приближенные к окну 15 два средних ролика 11. Расстояние от окна 15 до оси ролика можно принять 8 мм, если в качестве нажимных роликов применить радиальные шариковые подшипники №24 по ГОСТ 8338-75 с наружным диаметром D=13 мм.
- Из условия гарантированного прилегания планки 9 в любом месте к направляющей поверхности 8 крестовины 5 целесообразно, чтобы планка 9 прижималась не менее, чем двумя нажимными роликами 11. Отсюда следует, что расстояние между осями 1-го и 3-го роликов, а также между осями 2-го и 4-го роликов должно равняться длине l планки 9.
- Величина радиуса R определяется по формуле:
R=0,5(b+l)+1 мм.
- Расстояние L между осями крайних роликов 11:
L=2l-с.
Оси крайних роликов 11 смещены за пределы окружности радиуса R на (2...5) мм, если измерять по оси симметрии планки 9.
- Длина окна 15 в крестовине 5 определяется с учетом тех же факторов, что и при определении ширины b, при крайних смещенных положениях крестовины 5 относительно неподвижного основания 6.
- Длина окна 14 в основании 6 определяется из условия возможности введения через него трубы 16 с кабелями и соединителями и поводком 17.
- При любом положении крестовины 5 относительно основания 6 оба ролика 13 не выходят из контакта с соответствующей продольной поверхностью 22 основания 6.
- В подвижных сочленениях крестовины 5 с основанием 6 и с планкой 9 (в обеих возвратно-поступательных кинематических парах) целесообразно назначать посадки  .
.
- Пружины 12 нажимных роликов 11 и 13 с учетом всей динамики механизма должны всегда обеспечивать гарантированный односторонний выбор боковых люфтов в указанных выше подвижных посадках. Это необходимо для обеспечения прецизионной степени точности первого исполнения механизма привода ДУ ГН.
Механизм привода ДУ ГН постоянно работает на "холостом ходу", не выполняет никакой полезной работы. Силы полезного сопротивления движению механизма отсутствуют и преодолеваются всего лишь силы вредного сопротивления - силы трения в двух возвратно-поступательных кинематических парах и силы инерции планки 9 и крестовины 5 вместе со всеми смонтированными на ней деталями, вызывающие поперечную нагрузку на вал ротора 10 ДУ 3. Маловероятно, что в условиях "холостого хода" механизма может достигаться предельно допустимая поперечная нагрузка на вал ротора 10 ДУ.
А на тот случай, когда конструкция ДУ 3 наиболее ажурная и вызывает опасение перегрузка вала ротора 10 ДУ в условиях "холостого хода" механизма с одновременной стрельбой, ниже предлагается второе исполнение механизма привода ДУ 3, состоящее в том, что к первому исполнению добавляется дополнительное устройство, полностью устраняющее поперечную нагрузку на вал ротора 10 ДУ.
С этой целью планка 9 крепится на нижнем конце промежуточного вала 23 (см. фрагмент кинематической схемы "К пункту 3 формулы" на фиг.1), а верхний его конец соединяется с валом ротора 10 ДУ с помощью точной крестовой компенсирующей муфты 24. Промежуточный вал 23 смонтирован в подшипниках в корпусе (на фиг.1 корпус не показан) и корпус вместе с ДУ 3 крепится на поворотной части 2. Таким образом, поперечная нагрузка от планки 9 воспринимается промежуточным валом 23, а вал ротора 10 ДУ, соответственно, полностью разгружается. Конструктивная совместимость с ВКУ сохраняется и для второго исполнения механизма вне зависимости от наличия центрального сквозного отверстия во ВКУ.
Сравнительным недостатком второго исполнения механизма привода ДУ ГН является снижение степени точности с прецизионной до второй, так как, кроме одной плавающей крестовины 5, появляется и вторая - в крестовой муфте 24.
Предлагается ЗУ с третьим исполнением механизма привода ДУ ГН, имеющим всего лишь одну плавающую крестовину в составе точной крестовой компенсирующей муфты 24 и, следовательно, обладающим прецизионной точностью (см. фрагмент ЗУ на фиг.2).
На неподвижной части 1 крепится штанга 25 и устанавливается ВКУ 26 так, чтобы штанга и центральное отверстие во ВКУ были соосны с посадочным местом под погон. Верхний конец штанги 25 с помощью крестовой муфты 24 соединяется с валом ротора 10 ДУ 3, установленного на поворотной части 2 по ее геометрической оси вращения.
Предлагается ЗУ с четвертым исполнением механизма привода ДУ ГН, в кинематической цепи которого имеется лишь точная крестовая компенсирующая муфта 24 и которое, следовательно, обладает прецизионной точностью (см. фрагмент ЗУ на фиг.3).
На неподвижной части 1 устанавливается ДУ 3 и ВКУ 26 так, чтобы ротор 10 ДУ 3 и центральное отверстие во ВКУ были соосны с посадочным местом под погон. На поворотной части 2 по ее геометрической оси вращения крепится штанга 25, нижний конец которой с помощью крестовой муфты 24 соединяется с валом ротора 10 ДУ 3.
Предлагается ЗУ с пятым исполнением механизма привода ДУ ГН, представляющим собой конструктивное усовершенствование четвертого исполнения (см. фрагмент ЗУ на фиг.4).
В процессе разработки предлагаемой ЗУ может быть выявлена необходимость применения амортизаторов 27 для демпфирования поперечных колебаний конца штанги 25 и обеспечения более благоприятных динамических условий для муфты 24 и ДУ 3. Радиальные шарнирные растяжки в четырех направлениях (по числу опор ВКУ) с амортизаторами 27 обеспечивают дополнительную связь - упругую опору конца штанги 25 через кольцо 28 и шарикоподшипник 29. В качестве амортизаторов 27 могут быть использованы, например, стандартные корабельные амортизаторы АКСС-М ГОСТ 17053.1-80, применяемые для установки ВКУ или более податливые.
Предлагается ЗУ с шестым исполнением механизма привода ДУ ГН, отличающимся от пятого исполнения тем, что для демпфирования поперечных колебаний конца штанги 25 вместо амортизаторов используется фрикционное устройство 30 с одной или несколькими парами поверхностей трения (см. фрагмент ЗУ на фиг.5). Кольцо 28 связано с помощью радиальных шарнирных растяжек с фрикционным устройством 30, а последнее закреплено на неподвижных стойках. Силы трения в фрикционном устройстве и эффективность демпфирования регулируются затяжкой набора пружин 31.
Предлагаются ЗУ, имеющие гидравлическую систему с трубопроводом, прокладываемым от неподвижной части 1 к поворотной части 2, с седьмым, восьмым, девятым и десятым исполнениями механизма привода ДУ ГН (см. соответственно фиг.6, 7, 8 и 9).
Эти исполнения аналогичны соответственно третьему, четвертому, пятому и шестому исполнениям механизма и во всех этих исполнениях содержится идентичная точная крестовая компенсирующая муфта 24. Различие заключается лишь в том, что в седьмом, восьмом, девятом и десятом исполнениях вместо штанги 25 устанавливается трубка 32, соединяющая гидросистемы неподвижной 1 и поворотной 2 частей ЗУ и входящая в кинематическую цепь механизма.
Подвод жидкости к трубке 32 осуществляется через гидравлическую муфту 33, устанавливаемую на паре шарикоподшипников 34 и имеющую два уплотнения 35.
В девятом и десятом исполнениях механизма радиальные шарнирные растяжки присоединяются к корпусу гидравлической муфты 33.
Недостатком всех с третьего по десятое исполнений механизма привода ДУ ГН является то, что для их осуществления, как и для боевой установки по патенту 2180089, необходимо ВКУ, обязательно имеющее центральное сквозное отверстие, а их преимуществами являются простота конструкции механизма и наравне с первым исполнением высшая прецизионная степень точности.
ЗУ с четвертым, пятым, шестым, восьмым, девятым и десятым исполнениями механизма привода ДУ 3 обладают оригинальным отличительным признаком - размещением ДУ 3 не на поворотной части 2, как это обычно делается на ЗУ, а на неподвижной части 1. При этом следует ожидать улучшения динамических условий для ДУ 3.
Естественно изменится и схема соединений в части подключения кабеля от ДУ 3.
Источники информации
1. Зенитная самоходная установка 2С6М. Техническое описание 2С6М0000000-01ТО. Изд. 6/202623р-П92, 1992.
2. Описание изобретения к патенту Российской Федерации № 2180089, действующему с 24.02.2000г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕНИТНАЯ УСТАНОВКА | 2005 |
|
RU2290587C1 |
| БОЕВОЕ ОТДЕЛЕНИЕ БРОНИРОВАННОЙ МАШИНЫ | 2003 |
|
RU2258889C2 |
| Крестово-кулисная муфта | 2024 |
|
RU2829844C1 |
| Оптический пост оптико-электронной системы комплекса вооружения | 2021 |
|
RU2767820C1 |
| БОЕВАЯ УСТАНОВКА | 2000 |
|
RU2180089C2 |
| МНОГОСАТЕЛЛИТНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2011 |
|
RU2461753C1 |
| ПРЕСС-АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ КОРПУСОВ КОНФЕТ | 2006 |
|
RU2327362C2 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| КРЕСТОВО-КУЛИСНАЯ МУФТА СО СМАЗКОЙ | 1973 |
|
SU383914A1 |
| Крестово-кулисная муфта | 1974 |
|
SU513183A1 |
Изобретение относится к военной технике, в частности к зенитным установкам. Сущность изобретения заключается в том, что зенитная установка снабжена прецизионным механизмом привода датчика угла горизонтального наведения, который выполнен в виде плавающей крестовины и двух связанных с ней безлюфтовых, накрест расположенных прямолинейных возвратно-поступательных кинематических пар. Одна из упомянутых пар выполнена с возможностью подвижного соединения одной из направляющих поверхностей плавающей крестовины с неподвижной частью или с поворотной частью, а вторая - с возможностью подвижного соединения другой направляющей поверхности плавающей крестовины с ротором датчика угла, установленного соответственно на поворотной части или на неподвижной части. Реализация изобретения позволяет повысить точность горизонтального наведения оружия. 10 з.п. ф-лы, 9 ил.