Изобретение относится к машиностроению и может быть использовано в робототехнических устройствах.
Известен манипулятор, содержапшй шар мирно установленную на поворотной платформе руку, выполненную в виде двух вертикальных и одного горизонтального звеньев, имеющих приводы ориентации схвата, а также расположенные на поворотной платформе приводы звеньев руки, включающие волновые редукторы и датчики положения lUНедостатком указанного манипулятора являются ухудшенные динамические характеристики, и, как следствие, пониженная точность позициониро эния, а также недостаточная надежность работы в виду отсутствия предохранительного устройства от FIOломки подвижных звеньев руки в случае упора в препятствие, так как для уравновешивания горизонтального звена руки с механизмом ориентации схвата введен дополнительно груз, а приводы исполнительных звеньев выполнены таким образом, что при перемещении звеньев руки электродвигатели перемещаются сами.
Целью изобретения является повышение точности позиционирования, улучшение динамических характеристик.
Указанная цель досгигается тем, что в манипуляторе, содержащем шарнирно установленную на поворотной платформе руку, вьтолненную в виде двух вертикальных и одного горизонтального ЗЕшньев, имеющих приводы ориентации схвата, а также расположенные на поворотной платформе приводы звеньев руки, включающие волновые редукторы и датчики положени55, каждый из приводов звеньев руки выполнен в йиде кривошипно-шатунного механизма с Г-образными двуплечими кривошипами, одно плечо которых соединено с дополнительн- введенной уравновешивающей пружиной дв-. стороннего .действия, а ..другое -- с шатуном, причем шатуны привода О;:.1ента,чи схвата связаны со своими кривошипами посредством дополнительно введенных упругих элементов. ,
С Целью повыщеиия надежности работы манипулятора привод генератора волн каждого волнового редуктора снабжен фрикционной шарикоподшипниковой передачей и компенсирующей крестовой муфтой, причем сепаратор одного из подшипников входного вала волнового редуктора соединен с генератором волн посредством крестовой муфты, а наружное кольцо этого подшипника связано с дополнительно введенной пружиной, установленной в корпусе волнового редуктора.
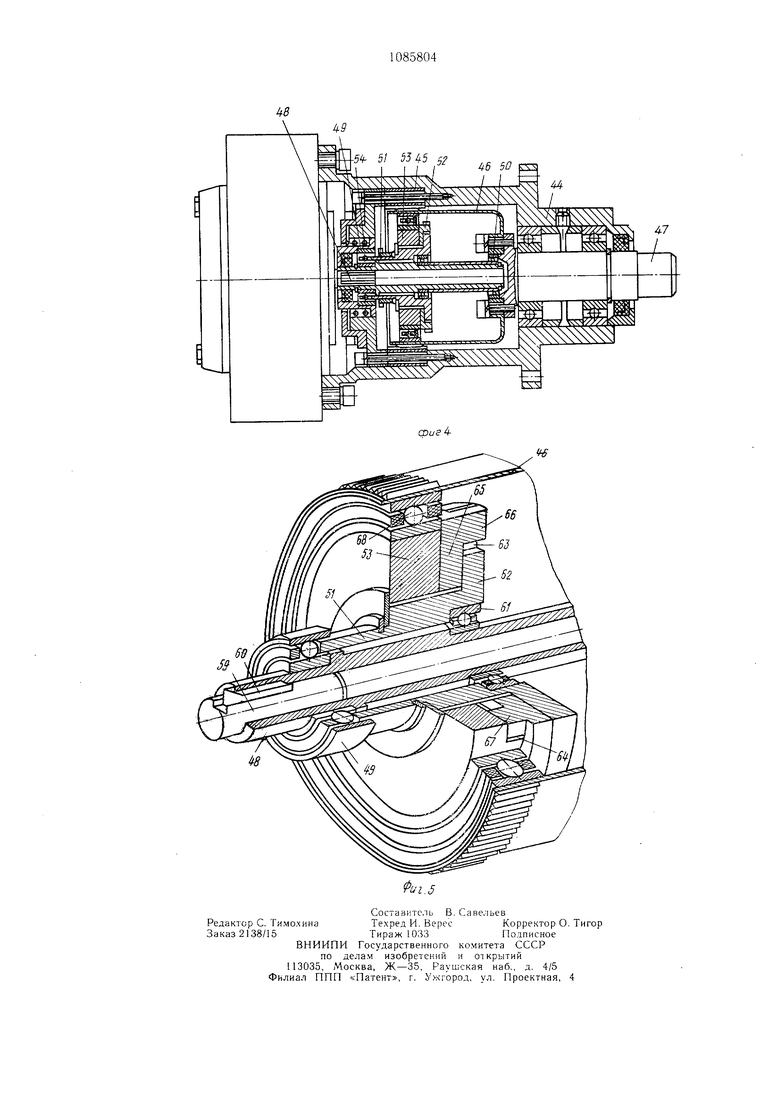
На фиг. I изображена кинематическая схема манипулятора; на фиг. 2 -- условно оазвернутая в плоскость кинематическая iCxeME уравновешивания вертикальнного и го1ризонтального звеньев и их связь с уравновешивающими пружинами и датчиками по ложения; на фиг. 3 - кинематическая схема кривошипно-щатунного механизма, выполненного в виде двойного шарнирного па-, раллелограмма привода механизма ориентации; на фиг. 4 - электродвигатель с волновым редуктором; на фиг. 5 - привод генератора волн волнового редуктора.
Манипулятор (фиг. 1) состоит из неподвижного основания 1, на котором установлен привод (электродвигатель 2 и волновой редуктор ) поворотной платформы 4, вращающейся в подшипниках. На платформе при помощи оси 5 щарнирно установлена рука, содержаш.аявертикальные звенья-рычаги 6 и 7, горизонтальное звено 8 с механизмом ориентации (вал 9, коническая передача 10), к которому присоединен схва- 11. Иа платформе установлены индивидуальные приводы звеньев руки: перемещения вертикального звена (электродвигатель 12 волновой редуктор 13), горизонтального (электродвигатель 14, волновой редуктор 15), .механизма ориентации (двигатель 16, волновой редуктор 17 - вращение схвата, двигатель 8, волновой редуктор 19 -- «сгиб схвата).
На выходные валы редукторов насажены Г-образные кривошипы 20--23. На оси 5 шариирно установлен Г-образный рычаг 24. Кривошипы приводов со своими звень ИМИ соединены шату}гами.
Кривошиги о-шату1 ные механизмы, содержащие}
плечо криво ьипа 20, шатун 25, нижнюю часть рычага б,
плечо кривоши-па 21, шатун 26, Г-образный рычаг 24, выполнены в виде шарнирных параллелограммов и образуют кинематические передачи к вертикальному и горизонтальным звеньям соответственно (одно плечо Г-образного рычага 24 соединено с шатуном 26, а второе -- с вертикальным звеном 7, шарнирно связанным с горизонтальнь.1 звеном 8).
Кривошипно-шатунные механизмы, содержащие HBeiibH
кривошипы 22. пары щатуноз 27, 28.
кривошипы 23, пары шатунов 29 и 30 вьшолнены к виде двойных шарнирных паралле,.1ограммоз и образуют кинематически передачи от приводов к .механизму вращения схвата и сгиба схвата соответственно.
Кривошипы 20 и 21 (фиг. 2) с помощью авеньев-штоков-З и 32 соединены с пружинами 33 и 34 ураБновеши1зания статических моменгов от веся звеньев вертикального кгоризонтального рычагоо соответственно. Пружины установлены в корпусах 35 и 36, закрепленных иарнирно на поворотной плат форме 4.
Пружина 33 уравновешивания вертикаль. иого знсна устанавливается в корпус 35 без гфедв; рительного поджатия, рабочее усилие ее подбирается из расчета полного ураб новешивания статического момента, создаваемого звеньями при максимальном от клонении вертикального звена от вертикали. Пружина 34 устанавливается в корпус 36 и с помощью перемещаемых по корпусу 36 упоров 37 поджимается до рабочего усилия, обеспечивающего уравновещивание ста тическоГо момента, создаваемого горизон тальным звеном. Пружина 3 выбрана мяг кой, обеспечивает незначительное прираще ние усилия при рабочем ходе. Корпуса пружин шарнирно закреплен1 на поворотной платформе таким образом что линия, соединяющая оси шарниров н кривошипных пальцев при повороте кривощипов на максимальный угол, совпадает с вертикалью, а максимальный угол наклона этой линии к вертикали при работе не превышает 6. С выходными валами волновых редукторов 13 и 15 приводов качания вертикального и горизонтального звеньев (на которых закреплены кривошипы 20 и 21) кинематически связаны датчики 38 н 39 - аналоговые преобразователи углов поворота криво щипов 20, 21 в сигналы, пропорциональные синусу (косинусу) этих углов. Шатуны 27- 30 двойных шарнирных параллелограммов привода механизмов ориентации соединены со своими кривощипами посредством пружин 40 (фиг. 3). Пружины 40 установлены в корпусах 41, которые шарнирно соединены с кривошипными пальцами. С помощью упоров 42 пружины 40 поджаты до рабочего усилия. Шатуны 27-30 взаимодействуют с пружинами посредством упоров 42, 43. Приводы всех степеней подвижности .манипулятора идентичны, включают волновой редуктор с цилиндрическим гибким колесом. Редуктор содержит корпус (фиг. 4) 44 с закрепленным в нем жестким колесом 45, гибкое колесо 46, к которому прикреплен выходной вал 47. Входной вал 48 установлен в подшипниках 49 и 50. Сепаратор 51 подшипника 49 с помощью компенсирующей муфты 52 соединен с генератором волн 53. Натяг в подшипнике 49 обеспечивает пружина 54. Усилие в пружине достаточно для передачи максимально допустимого момента на входном валу редуктора. Работа манипулятора осуществляется следующим образом. Горизонтальное звено 8 с присоединенным к нему механизмом ориентации, захватом, создает статический момент, пропорциональный косинусу угла, наклона звена 8 к горизонтали. При работе двигателя 14 угол Поворота кривошипа 21 равен углу поворота звена 8. Поэтому при любом значении угла поворота кривошипа 21 н звена 6 статическая нагрузка от веса звена 8 С механизмом ориентации может быть уравновешена постоянной силой. Пружина 34 воздействует на горизонтальное плечо к чвошипа 21 через шток 32 с требуемой силой. Пружина выбрана с малой жесткостью, поэтому на ее рабочем ходе имеет место незначительное отклонение рабочего усилия от расчетного. Уравновещивание горизонтального плеla происходит как при напольной установке манипулятора (как показано на фиг. 2), так и при закреплении манипулятора, когда ме- ханическая рука находится внизу. В первом случае воздействие пружины на шток 32 передается через упор 55, во втором - через упор 56. Псфедвижные упоры 37 на кор пусе 36 позволяют производить настройку рабочего усилия пружины при изменении массы захвата и массы перемещаемого груза. При работе двигателя 12 и отклонении вертикального звена 6 возникает статический момент, пропорциональный синусу угла отклонения звена б от вертикали. Знак момента меняется при переходе звеном 6 через вертикаль. Уравновешивающая пружина 33 при отклонении вертикального звена от вертикали воздействует через упоры 57, 58 на штоке 31 на горизонтальное плечо кривошипа 20 с силой, приблизительно уравновешивающей статический момент при любом отклонении вертикального звена от вертикали в рабочем диапазоне (для предлагаемого манипулятора перемещение вертикального звена составляет ±45). Учитывая, что при работе пружина отклоняется от вертикали на очень незначигельный угол (cos 6° 0,994), погрешность уравновешивания статических моментов не превышаем . Поэтому при статической разгрузке двигателей от веса звеньев руки индивидуальные приводы перемещения вертикального и горизонтального звеньев могут быть выбраны значительно меньщей мощности (их. роль сводится к преодолению сил йнерц: И и диссипативных сил). При работе двигателей 16 и 8 вращение кривошипоь 22 н 23 посредством промежуточных звеньев (28, 29 и 30, 31) передается ведомый) кривошипам 22 и 23. При осуществлении передачи вращения расстояние меж ду кривошипными пальцами кривошипов 22, 23 будет непрерывно изменяться ввид) ошибок изготовления н сборки, а пружину 40, поджатия до рабочего усилия, будет Создавать необходимый натяг. Вал 59 электродвигателя с помощью шпонки 60 соединен с входным валом 48 редуктора. В шаирокоподшипнике 49 стандартный сепаратор заменен на сепаратор 51, выполненный по фиг. 5. Сепаратор, кроме того, опирается на подшипник 61. Он содержит фланец 62, в ко гором имеются пазы 63. В генераторе волн 53 выполнены пазы 64. Между фланцем 62 сепаратора 51 и генератором волн 53 находится вкладыш 65, содержащий на торцах выступы 66 и 67, находяндиеся во взаимно перпендикулярных плоскостях. Выступы 66 с одного торца вкладыша входят в пазы 63 фланца 62 сепаратора, а выступы 67 на другом торце входят в пазы 64 генератора волн 53. Таким образом, элементы: фланец 62, вкладыш 65 и генератор волн 53 образуют компенсируюш.ую «крестовую муфту обесценивающую самаустановку генератора волн в плоскости, перпендикулярной оси его вращения. На генератор волн насажен гибкий подшицник 68, который вставлен в гибкое колесо 46. Отсюда следует, что шарикоподшипник 49 используется как фрикционная шарикоподшипниковая передача, выходным элементом которой является сепаратор 5. Последний через вкладыш 65 приводит во вращение генератор волн 53. В случае «наезда руки робота на препятствие манипулятор предохраняется от поломки за счет имеющейся в волновом редукторе каждого индивидуального приво30да преодохранительной фрикционной шарикоподшипниковой передачи, связанной с волновой с помощью компенсирующей муфты. При превышении заданного момента на выходном валу привода наружное кольцо опорного подшипника 49, преодолевая противодействие пружины 54, отходит влево (фиг. 4), допуская тем самым проскальзывание в шариковой передаче. Кроме того, предохранительная н арикоподщипниковая передача повышает и динамические качества привода, уменьшая приведенный к валу двигателя момент инерции нагрузки. Исполнение манипулятора по предложенной схеме позволяет упростить конструкцию, выполняя ее из унифицированных узлов и блоков; повысить точность позиционирования за счет применения практически беззазорных передаточных механизмов; улучшить динамические характеристики манипулятора за счет статической разгрузки приводов от веса звеньев руки; предохранить манипулятор от поломки при «наезде на препятствие, что особенно важно в режиме обучения.


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ НЕФТИ И НЕФТЕПРОДУКТОВ И РАЗМЫВА ИХ ОСАДКА В РЕЗЕРВУАРЕ | 2002 |
|
RU2238795C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Манипулятор | 1985 |
|
SU1281400A1 |
| ВЕТРОДВИГАТЕЛЬ | 2000 |
|
RU2190123C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Промышленный робот | 1988 |
|
SU1563967A1 |
| Манипулятор | 1982 |
|
SU1060465A1 |
| Манипулятор (его варианты) | 1984 |
|
SU1261791A1 |
| Манипулятор | 1980 |
|
SU975383A1 |
1. МАНИПУЛЯТОР, содержащий шарнирно установленную на поворотной платформе руку, выполненную в виде двух вертикальных и одного горизонтального звеньев, имеющих приводы ориентации схвата, а также расположенные на поворотной платформе приводы звеньев руки, включающие волновые редукторы и датчики положения, отличающийся тем, что, с целью повышения точности позиционирования и улучшения динамических характеристик, каждый из приводов звеньев руки выполнен в виде кривошипно-шатунного механизма с Г-образными двуплечими кривошипами, одно плечо которых соединено с дополнительно введенной ураавновешивающей пружиной двустороннего действия, а другое - с шатуном, причем шатуны привода ориентации схвата связаны со своими кривошипами посредством дополнительно введенных упругих элементов. 2. Манипулятор по п. 1, отличающийся тем. что. с целью повышения надежности работы в режиме обучения, привод генератора волн каждого редуктора снабжен фрикционной шарикоподшипниковой передачей и компенсирующей крестовой муфтой, € причем сепаратор одного из подшипников входного вала волнового редуктора соединен с генератором волн посредством крестовой муфты, а наружное кольцо этого подшипника связано с дополнительно введенной пружиной, установленной в корпусе волнового редуктора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Юрерич Е | |||
| И | |||
| и др | |||
| Устройство промышленных роботов | |||
| Л., «Машиностроение, 1980, с | |||
| СПОСОБ ПОЛУЧЕНИЯ ЧИСТОГО ГЛИНОЗЕМА И ЕГО СОЛЕЙ ИЗ СИЛИКАТОВ ГЛИНОЗЕМА, ПРОСТЫХ ГЛИН И. Т.П. | 1915 |
|
SU280A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
