Изобретение относится к лазерной локации, а также к системам транспортировки и доставки мощного излучения на воздушные и космические объекты.
Преимущественная область использования изобретения - очистка космического околоземного пространства от различных малоразмерных объектов, представляющих опасность для современных космических аппаратов и спутников. Воздействие мощного лазерного излучения на малоразмерные объекты, находящиеся на космической орбите, приводит к изменению параметров движения и, как следствие, орбит этих нежелательных объектов, вследствие чего данные объекты через некоторое время сгорают в более плотных слоях атмосферы.
Известен способ наведения и доставки силового излучения на объект [1], заключающийся в определении пространственных координат объекта, формировании силового излучения от источника, находящегося на земной поверхности, наведения силового излучения на космический объект посредством распределительного и наводящего зеркал, находящихся в космосе на космических орбитах. Данный способ обладает недостатком, характеризующимся невысокой плотностью энергии силового излучения на объекте, что обусловлено влиянием атмосферного канала распространения излучения, приводящего к существенному увеличению расходимости излучения, направляемого через атмосферный канал на объект.
Известен способ адаптивной фокусировки излучения на объект через слой турбулентной атмосферы [2], заключающийся в подсвете объекта силовым излучением через искажающую среду - атмосферный канал распространения излучения, приеме отраженного от объекта излучения, введении в поток силового излучения фазовых предискажений и максимизации отраженного от объекта сигнала.
К недостаткам данного способа следует отнести невысокую плотность энергии силового излучения на объекте вследствие низкой эффективности компенсации атмосферных искажений при работе по движущемуся космическому объекту.
Известен способ наведения излучения на объект [3], заключающийся в определении координат объекта  формировании импульса вспомогательного излучения в направлении измеренных координат объекта, приеме отраженного от объекта импульса вспомогательного излучения, формировании рабочего излучения посредством обращения волнового фронта отраженного импульса вспомогательного излучения, введении дополнительного наклона волнового фронта в рабочее излучение и направлении его на объект через атмосферный канал распространения излучения. К недостаткам данного способа следует отнести невысокую плотность энергии излучения на объекте вследствие низкой эффективности компенсации атмосферных искажений в канале распространения рабочего излучения, что обусловлено влиянием высокой скорости движения космического объекта, вследствие которой вспомогательное излучение, в котором фиксируются атмосферные искажения, и сформированное на основе обращения волнового фронта рабочее излучение проходят по разным атмосферным каналам.
формировании импульса вспомогательного излучения в направлении измеренных координат объекта, приеме отраженного от объекта импульса вспомогательного излучения, формировании рабочего излучения посредством обращения волнового фронта отраженного импульса вспомогательного излучения, введении дополнительного наклона волнового фронта в рабочее излучение и направлении его на объект через атмосферный канал распространения излучения. К недостаткам данного способа следует отнести невысокую плотность энергии излучения на объекте вследствие низкой эффективности компенсации атмосферных искажений в канале распространения рабочего излучения, что обусловлено влиянием высокой скорости движения космического объекта, вследствие которой вспомогательное излучение, в котором фиксируются атмосферные искажения, и сформированное на основе обращения волнового фронта рабочее излучение проходят по разным атмосферным каналам.
Наиболее близким по технической сущности к предлагаемому техническому решению является способ доставки излучения на движущийся объект [4], выбранный в качестве прототипа. Данный способ заключается в определении координат  , дальности R0(t0) и скорости
, дальности R0(t0) и скорости  объекта в момент времени to относительно первой заданной точки пространства А1 в первой системе координат, связанной с платформой летательного аппарата (ЛА), движущейся относительно источника рабочего излучения, формировании вспомогательного излучения, определении расстояния между второй заданной точкой пространства А2 во второй системе координат, связанной с платформой ЛА, и источником рабочего излучения, направлении вспомогательного излучения от источника рабочего излучения во вторую заданную точку пространства А2, формировании импульса отраженного вспомогательного излучения путем отражения импульса вспомогательного излучения во второй заданной точке пространства А2, формировании рабочего излучения посредством обращения волнового фронта вспомогательного излучения, отраженного во второй заданной точке пространства А2, наведения рабочего излучения из первой заданной точки пространства A1 в точку ожидаемого нахождения объекта с координатами
объекта в момент времени to относительно первой заданной точки пространства А1 в первой системе координат, связанной с платформой летательного аппарата (ЛА), движущейся относительно источника рабочего излучения, формировании вспомогательного излучения, определении расстояния между второй заданной точкой пространства А2 во второй системе координат, связанной с платформой ЛА, и источником рабочего излучения, направлении вспомогательного излучения от источника рабочего излучения во вторую заданную точку пространства А2, формировании импульса отраженного вспомогательного излучения путем отражения импульса вспомогательного излучения во второй заданной точке пространства А2, формировании рабочего излучения посредством обращения волнового фронта вспомогательного излучения, отраженного во второй заданной точке пространства А2, наведения рабочего излучения из первой заданной точки пространства A1 в точку ожидаемого нахождения объекта с координатами  относительно первой заданной точки пространства А1 посредством первого блока наведения излучения.
относительно первой заданной точки пространства А1 посредством первого блока наведения излучения.
К недостаткам данного способа следует отнести невысокую точность наведения излучения из первой заданной точки пространства А1 в направлении точки ожидаемого нахождения объекта, что обусловлено изменением направления оси диаграммы направленности сформированного после ОВФ рабочего излучения, поступающего в точку A1 от источника рабочего излучения, расположенного на земле, относительно необходимого для точного наведения рабочего излучения идеального направления оси рабочего излучения, которое должно поступать в точку А1 строго перпендикулярно вектору скорости платформы ЛА. Для этого импульс вспомогательного излучения от источника рабочего излучения, расположенного на земле, должен приходить в точку А2 на отражательный элемент, расположенный на платформе движущегося с высокой космической скоростью ЛА в момент, когда точка А2 проходит точку траверса траектории относительно наземного источника рабочего излучения. Для выполнения этого условия необходимо с высокой степенью точности иметь информацию о моменте времени прохождения точки траверса платформой ЛА и связанной с платформой заданной точки А2, а также осуществлять в соответствии с этой информацией формирование импульса вспомогательного излучения в соответствующий момент времени с весьма малой временной погрешностью. Высокая скорость движения ЛА приводит к невысокой точности определения указанных моментов времени и, соответственно, к изменению углового направления оси рабочего излучения, приходящего в первую заданную точку А1, относительно идеального направления оси рабочего излучения, строго перпендикулярного вектору скорости платформы ЛА и оси первого блока наведения, параллельной вектору скорости платформы ЛА. При этом вектор направления рабочего излучения из точки А1 в точку ожидаемого нахождения объекта с координатами  приобретает неконтролируемый дополнительный угловой сдвиг, обусловленный указанным изменением направления оси вектора рабочего излучения, приходящего в точку А1, относительно требуемого идеального направления, перпендикулярного оси первого блока наведения излучения. Вследствие этого точность наведения рабочего излучения из точки А1 в точку ожидаемого нахождения объекта уменьшается, что обусловливает также снижение плотности энергии рабочего излучения на объекте.
приобретает неконтролируемый дополнительный угловой сдвиг, обусловленный указанным изменением направления оси вектора рабочего излучения, приходящего в точку А1, относительно требуемого идеального направления, перпендикулярного оси первого блока наведения излучения. Вследствие этого точность наведения рабочего излучения из точки А1 в точку ожидаемого нахождения объекта уменьшается, что обусловливает также снижение плотности энергии рабочего излучения на объекте.
В качестве прототипа для устройства, реализующего предлагаемый способ, выбрано устройство, реализующее способ - прототип [4].
Достигаемым техническим результатом является повышение точности наведения излучения на движущийся объект, увеличение плотности энергии излучения на объекте.
Новый технический результат достигается следующим.
1. В известном способе, заключающемся в определении в момент времени to координат  , дальности R(to) и скорости
, дальности R(to) и скорости  объекта относительно первой заданной точки пространства А1 в системе координат, связанной с платформой летательного аппарата (ЛА), движущейся относительно источника рабочего излучения, определении расстояния между платформой ЛА и источником рабочего излучения, формировании вспомогательного излучения, формировании рабочего излучения посредством обращения волнового фронта (ОВФ) вспомогательного излучения, наведения оси рабочего излучения из первой заданной точки пространства А1 в точку ожидаемого нахождения объекта с координатами
объекта относительно первой заданной точки пространства А1 в системе координат, связанной с платформой летательного аппарата (ЛА), движущейся относительно источника рабочего излучения, определении расстояния между платформой ЛА и источником рабочего излучения, формировании вспомогательного излучения, формировании рабочего излучения посредством обращения волнового фронта (ОВФ) вспомогательного излучения, наведения оси рабочего излучения из первой заданной точки пространства А1 в точку ожидаемого нахождения объекта с координатами  посредством первого блока наведения, до формирования вспомогательного излучения осуществляют наведение оси источника вспомогательного излучения на ось источника рабочего излучения, осуществляют определение пространственных координат вектора направленности
посредством первого блока наведения, до формирования вспомогательного излучения осуществляют наведение оси источника вспомогательного излучения на ось источника рабочего излучения, осуществляют определение пространственных координат вектора направленности  оси источника рабочего излучения относительно первой заданной точки пространства А1 в момент времени t1, определяют координаты первого вектора разности
оси источника рабочего излучения относительно первой заданной точки пространства А1 в момент времени t1, определяют координаты первого вектора разности  между координатами
между координатами  точки ожидаемого нахождения объекта и координатами вектора направленности
точки ожидаемого нахождения объекта и координатами вектора направленности  оси источника рабочего излучения относительно первой заданной точки пространства А1
оси источника рабочего излучения относительно первой заданной точки пространства А1 , осуществляют наведение выходной оси первого блока наведения в первую уточненную точку ожидаемого нахождения объекта с координатами
, осуществляют наведение выходной оси первого блока наведения в первую уточненную точку ожидаемого нахождения объекта с координатами  , равными первому вектору разности
, равными первому вектору разности 
 ,
,
осуществляют контроль точности наведения излучения на объект путем определения вектора  ошибки наведения излучения на объект в момент прихода излучения на объект, осуществляют компенсацию измеренной ошибки наведения путем наведения выходной оси первого блока наведения во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами
ошибки наведения излучения на объект в момент прихода излучения на объект, осуществляют компенсацию измеренной ошибки наведения путем наведения выходной оси первого блока наведения во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами  , равными сумме координат
, равными сумме координат  первой уточненной точки ожидаемого нахождения объекта и координат вектора
первой уточненной точки ожидаемого нахождения объекта и координат вектора  ошибки наведения излучения на объект
ошибки наведения излучения на объект
осуществляют смещение оси источника вспомогательного излучения параллельно самой себе в плоскости, перпендикулярной этой оси, на величину, пропорциональную расстоянию от платформы ЛА до источника рабочего излучения и величине скорости платформы ЛА относительно источника рабочего излучения, в момент времени формирования импульса вспомогательного излучения определяют координаты вектора направления оси источника рабочего излучения  в системе координат, связанной с первой заданной точкой А1, определяют координаты второго вектора разности
в системе координат, связанной с первой заданной точкой А1, определяют координаты второго вектора разности  между ранее определенным вектором направления оси источника рабочего излучения
между ранее определенным вектором направления оси источника рабочего излучения  в момент времени t1 и вектором направления оси источника рабочего излучения
в момент времени t1 и вектором направления оси источника рабочего излучения  , координаты которого определены в момент времени формирования импульса вспомогательного излучения
, координаты которого определены в момент времени формирования импульса вспомогательного излучения
на основании полученных величин пространственных координат второго вектора разности  формируют компенсирующий угловой сдвиг, пропорциональный величинам пространственных координат второго вектора разности
формируют компенсирующий угловой сдвиг, пропорциональный величинам пространственных координат второго вектора разности  , осуществляют введение компенсирующего углового сдвига в направление распространения рабочего излучения в момент времени его прихода на платформу ЛА, осуществляют наведение рабочего излучения из первой заданной точки пространства А1 во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами
, осуществляют введение компенсирующего углового сдвига в направление распространения рабочего излучения в момент времени его прихода на платформу ЛА, осуществляют наведение рабочего излучения из первой заданной точки пространства А1 во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами  посредством первого блока наведения, при этом суммирование векторов и их координат осуществляют по правилам суммирования векторных величин.
посредством первого блока наведения, при этом суммирование векторов и их координат осуществляют по правилам суммирования векторных величин.
2. Для определения пространственных координат  вектора направленности оси источника рабочего излучения формируют зондирующее лазерное излучение, вектор направленности оси которого совпадает с направлением оси источника рабочего излучения, направляют сформированное зондирующее излучение от источника рабочего излучения в первую заданную точку А1 пространства и определяют пространственные координаты вектора направленности сформированного зондирующего излучения в системе координат относительно точки А1, полученные значения координат принимают за пространственные координаты
вектора направленности оси источника рабочего излучения формируют зондирующее лазерное излучение, вектор направленности оси которого совпадает с направлением оси источника рабочего излучения, направляют сформированное зондирующее излучение от источника рабочего излучения в первую заданную точку А1 пространства и определяют пространственные координаты вектора направленности сформированного зондирующего излучения в системе координат относительно точки А1, полученные значения координат принимают за пространственные координаты  вектора направленности оси источника рабочего излучения, причем формирования рабочего излучения не производят.
вектора направленности оси источника рабочего излучения, причем формирования рабочего излучения не производят.
3. Для осуществления контроля точности наведения излучения на объект осуществляют формирование зондирующего излучения в момент времени tz, следующий за моментом времени t1 определения координат оси источника рабочего излучения, направляют зондирующее излучение от точки А1 на источник рабочего излучения, а после отражения зондирующего излучения от источника рабочего излучения осуществляют наведение зондирующего излучения на объект из первой заданной точки А1 посредством первого блока наведения, определяют реальные координаты объекта  на момент времени прихода на объект зондирующего излучения, определяют координаты вектора разности
на момент времени прихода на объект зондирующего излучения, определяют координаты вектора разности  между точкой реального положения объекта с координатами
между точкой реального положения объекта с координатами  в момент времени прихода зондирующего излучения на объект и точкой ожидаемого нахождения объекта с координатам
в момент времени прихода зондирующего излучения на объект и точкой ожидаемого нахождения объекта с координатам 

координаты полученного вектора разности принимают за координаты вектора  ошибки наведения излучения на объект
ошибки наведения излучения на объект  причем ось сформированного зондирующего излучения совпадает с направлением оси источника вспомогательною излучения.
причем ось сформированного зондирующего излучения совпадает с направлением оси источника вспомогательною излучения.
4. Для определения вектора ошибки  наведения излучения на объект осуществляют многократный подсвет объекта серией импульсов зондирующего излучения, для каждого из зондирующих импульсов подсвета объекта определяют вектор
наведения излучения на объект осуществляют многократный подсвет объекта серией импульсов зондирующего излучения, для каждого из зондирующих импульсов подсвета объекта определяют вектор  разности между измеренными реальными координатами объекта
разности между измеренными реальными координатами объекта  на момент прихода на объект данного импульса зондирующего излучения и координатами точки
на момент прихода на объект данного импульса зондирующего излучения и координатами точки  ожидаемого нахождения объекта
ожидаемого нахождения объекта  осуществляют определение среднего вектора разности
осуществляют определение среднего вектора разности  для полученной серии произведенных измерений вектора разности
для полученной серии произведенных измерений вектора разности  , параметры полученного усредненного вектора разности
, параметры полученного усредненного вектора разности  принимают за параметры вектора ошибок Р наведения излучения на объект
принимают за параметры вектора ошибок Р наведения излучения на объект  , где i - номер импульса зондирующего излучения из серии импульсов с общим числом импульсов, равным М:
, где i - номер импульса зондирующего излучения из серии импульсов с общим числом импульсов, равным М:
i=1,2,3... М.
5. До формирования импульса вспомогательного излучения в момент времени, непосредственно предшествующий этому формированию излучения, осуществляют измерение пространственных координат вектора направленности оси источника рабочего излучения в системе координат относительно первой заданной точки А1, а в момент времени формирования импульса вспомогательного излучения направление оси источника вспомогательного излучения устанавливают противоположным измеренному направлению оси источника рабочего излучения в системе координат относительно первой заданной точки А1 пространства.
6. После определения в момент времени t1 пространственных координат вектора направленности  оси источника рабочего излучения относительно первой заданной точки пространства А1 осуществляют наведение оси источника рабочего излучения в первую заданную точку пространства А1 путем введения компенсирующего углового сдвига в направление оси источника рабочего излучения, пропорционального по величине и противоположного по знаку измеренным координатам вектора направленности оси источника рабочего излучения в системе координат относительно первой заданной точки A1 посредством третьего блока наведения, а последующего определения координат первого вектора разности
оси источника рабочего излучения относительно первой заданной точки пространства А1 осуществляют наведение оси источника рабочего излучения в первую заданную точку пространства А1 путем введения компенсирующего углового сдвига в направление оси источника рабочего излучения, пропорционального по величине и противоположного по знаку измеренным координатам вектора направленности оси источника рабочего излучения в системе координат относительно первой заданной точки A1 посредством третьего блока наведения, а последующего определения координат первого вектора разности  и наведения выходной оси первого блока наведения в первую уточненную точку ожидаемого нахождения объекта с координатами
и наведения выходной оси первого блока наведения в первую уточненную точку ожидаемого нахождения объекта с координатами  не производят.
не производят.
7. В известное устройство для осуществления способа по п.1, содержащее размещенные на подвижной платформе летательного аппарата (ЛА) первый блок наведения, лазер подсвета цели, первое отражательное зеркало, первый блок обработки информации, первый блок связи, размещенные в наземной части устройства на одной оптической оси, оптически связанные второй блок наведения, источник рабочего излучения с блоком накачки, первая фокусирующая линза, блок обращения волнового фронта (ОВФ), отражательное зеркало с отверстием в центре, первый задающий генератор с формирующей линзой, второй блок обработки информации, второй блок связи, при этом оптический вход второго блока наведения через отражательное зеркало с отверстием в центре соединен с оптическим выходом источника рабочего излучения, выход первого задающего генератора оптически соединен через формирующую линзу и отверстие в центре отражательного зеркала с оптическим входом второго блока наведения, второй блок обработки информации соединен с блоком связи и с блоком накачки источника рабочего излучения, оптический выход лазера подсвета цели соединен с оптическим входом первого блока наведения посредством первого отражательного зеркала, первый блок обработки информации соединен с первым блоком связи и первым блоком наведения, введены размещенные на платформе ЛА третий блок наведения, первый фотоприемный блок, второй фотоприемный блок, расположенный в наземной части устройства, лазерный генератор вспомогательного излучения, дефлектор с блоком управления, светоделительное зеркало с отверстием в центре, второе отражательное зеркало с отверстием в центре, вторая фокусирующая линза, третье отражательное зеркало, блок угловой компенсации с блоком управления, плоскопараллельная пластина, уголковый отражатель, при этом лазерный генератор вспомогательного излучения, дефлектор, второе отражательное зеркало с отверстием в центре, светоделительное зеркало с отверстием в центре и третий блок наведения расположены на одной оптической оси, оптический вход первого блока наведения оптически соединен с третьим блоком наведения посредством последовательно расположенных на второй оптической оси блока угловой компенсации, плоскопараллельной пластины и светоделительного зеркала с отверстием в центре, оптический выход лазерного генератора вспомогательного излучения оптически соединен с третьим блоком наведения посредством дефлектора, отверстия в центре второго отражательного зеркала и отверстия в центре светоделительного зеркала, оптический вход первого фотоприемного блока оптически соединен с оптическим входом первого блока наведения посредством светоделительного зеркала с отверстием в центре, плоскопараллельной пластины и блока угловой компенсации, а с третьим блоком наведения посредством последовательно установленных и оптически связанных светоделительного зеркала с отверстием в центре, второго отражательного зеркала с отверстием в центре, второй фокусирующей линзы и третьего отражательного зеркала, второй фотоприемный блок и уголковый отражатель размещены на оптическом выходе второго блока наведения, причем оптический выход второго блока наведения оптически связан с третьим блоком наведения через атмосферный канал распространения излучения, первый блок обработки информации соединен с выходом первого фотоприемного блока, лазерным генератором вспомогательного излучения и с блоками управления дефлектором, блоком угловой компенсации и третьим блоком наведения, выход второго фотоприемного блока соединен со вторым блоком обработки информации.
8. В устройстве по п.7 первый фотоприемный блок содержит два многоэлементных фотоприемника, два объектива и светоделительное зеркало, причем первый многоэлементный фотоприемник оптически соединен с оптическим входом данного фотоприемного блока посредством первого объектива, а второй многоэлементный фотоприемник оптически соединен с оптическим входом фотоприемного блока посредством первого объектива, второго светоделительного зеркала и второго объектива.
9. В устройстве по п.7 лазерный генератор вспомогательного излучения содержит последовательно установленные на оптической оси оптически связанные источник излучения с блоком накачки, Фурье-линзу, третье светоделительное зеркало, блок оптических затворов с блоком управления, матрицу уголковых отражателей, источник подсвета со второй формирующей линзой, последовательно установленные на другой оптической оси оптически связанные второй задающий генератор, диафрагму, четвертый объектив и четвертый многоэлементный фотоприемник, при этом четвертый многоэлементный фотоприемник оптически соединен посредством четвертого объектива и третьего светоделительного зеркала с блоком оптических затворов, а через диафрагму - с выходом второго задающего генератора, выход второго задающего генератора связан с оптическим входом источника излучения посредством диафрагмы, третьего светоделительного зеркала и Фурье-линзы, четвертый многоэлементный фотоприемник, источник подсвета, блок управления блоком оптических затворов, второй задающий генератор и блок накачки источника излучения соединены с первым блоком обработки информации.
10. В устройстве по п. 7 первый и второй блоки наведения выполнены идентично и содержат два поворотных зеркала, два узла вращения, три подшипника вращения и два блока вращения, при этом первое и второе поворотные зеркала размещены в первом и втором узлах вращения под углом 45o к взаимно перпендикулярным осям вращения, первый узел вращения механически связан с основанием блока наведения посредством первого подшипника вращения, второй и третий подшипники вращения установлены вместе с первым поворотным зеркалом в первом узле вращения, второй узел вращения механически связан с первым узлом вращения посредством второго и третьего подшипников вращения, оси вращения узлов вращения совпадают с оптическими осями распространения излучения через блок наведения, каждый блок вращения содержит шаговый электродвигатель, датчик угла поворота и ячейку связи, соединенную с блоком обработки информации.
11. В устройстве по п.7 во втором блоке наведения второй фотоприемный блок и уголковый отражатель размещены на четвертом поворотном зеркале, причем направления оптических осей второго фотоприемного блока, уголкового отражателя и выходной оси блока наведения параллельны.
12. В устройстве по п.7 третий блок наведения выполнен в виде отражательного зеркала, размещенного в двойном кардановом подвесе.
13. В устройстве по п.7 элементы, размещенные на борту платформы ЛА, установлены на виброзащитном основании, механически соединенном с платформой ЛА.
14. В устройстве по п.7 на платформе летательного аппарата (ЛА) первый и третий блоки наведения установлены на одной оптической оси и оптически связаны через светоделительное зеркало, выполненное без отверстия, оптический вход первого фотоприемного блока оптически соединен с третьим блоком наведения через последовательно установленные светоделительное зеркало, фокусирующую линзу и отражательное зеркало, выход лазерного генератора вспомогательного излучения оптически соединен с третьим блоком наведения посредством дефлектора и вновь введенного малоразмерного отражательного зеркала, установленного на оптической оси между светоделительным зеркалом и третьим блоком наведения.
15. В устройстве по п.7 блок обращения волнового фронта содержит последовательно установленные на оптической оси оптически соединенные первую кювету с прозрачными окнами, первую и вторую проекционные линзы и вторую кювету с прозрачными окнами, при этом первая и вторая кюветы заполнены веществом, в котором осуществляют формирование обращенной волны.
На фиг. 1 приведена блок-схема устройства, реализующего предлагаемый способ, где введены следующие обозначения.
1 - Платформа летательного аппарата (ЛА) - самолета, содержащего первый (2) и второй (3) люки для приема и наведения лазерного излучения.
4 - Первый блок наведения.
5 - Третий блок наведения.
6 - Первый блок обработки информации.
7 - Лазерный генератор вспомогательного излучения.
8 - Дефлектор с блоком управления 62.
9 - Первый фотоприемный блок.
10 - Светоделительное зеркало с отверстием в центре.
11 - Лазер подсвета цели.
12 - Первое отражательное зеркало.
13 - Второе отражательное зеркало с отверстием в центре.
14 - Вторая фокусирующая линза.
15 - Третье отражательное зеркало.
16 - Блок угловой компенсации с блоком управления 17.
67 - Плоскопараллельная пластина.
Первый блок наведения 4 содержит первое 18 и второе 19 поворотные зеркала с первым 20 и вторым 21 блоками вращения.
Третий блок наведения 5 содержит отражательное зеркало 22, расположенное в двойном кардановом подвесе 23 и блок управления 24.
25 - Первый блок связи.
82 - Виброзащитное основание.
83 - Виброгасящие элементы.
Элементы поз. 1-25 расположены на борту ЛА 1.
Наземная часть устройства, реализующего способ, содержит следующие элементы.
26 - Источник рабочего излучения с блоком накачки 27.
28 - Первая фокусирующая линза.
29 - Блок обращения волнового фронта (ОВФ).
30 - Второй блок обработки информации.
31 - Второй блок наведения, содержащий третье 32 и четвертое 33 поворотные зеркала и третий 34 и четвертый 35 блоки вращения.
36 - Второй фотоприемный блок.
37 - Объектив.
38 - Первый многоэлементный фотоприемник.
39 - Отражательное зеркало с отверстием в центре.
40 - Первый задающий генератор с формирующей линзой 41.
42 - Второй блок связи.
43 - Система внешнего целеуказания - в состав устройства не входит.
80 - Атмосферный канал распространения излучения.
На фиг.2 более подробно представлена блок-схема части устройства, реализующего способ, размещенная на борту ЛА 1. Соответственные элементы на фиг.2 и фиг.1 имеют одинаковые номера позиций. Первый фотоприемный блок 9 содержит второй 44 и третий 45 объективы и второй 46 и третий 47 многоэлементные фотоприемники; второе светоделительное зеркало 48.
Лазерный генератор вспомогательного излучения 7 содержит следующие элементы:
49 - Источник излучения с блоком накачки 50.
51 - Фурье-линза.
52 - Блок оптических затворов.
53 - Матрица уголковых отражателей.
54 - Второй задающий генератор.
55 - Диафрагма.
56 - Третье светоделительное зеркало.
57 - Четвертый объектив.
58 - Четвертый многоэлементный фотоприемник.
59 - Блок управления блоком оптических затворов 52.
60 - Источник подсвета со второй формирующей линзой 61.
62 - Блок управления дефлектором.
63 - Второй блок угловой компенсации с блоком управления 64.
Позицией 65 на блок-схеме на фиг.2 обозначена наземная часть устройства, реализующего способ, содержащая источник рабочего излучения 26.
66 - Уголковый отражатель.
67 - Плоскопараллельная пластина.
80 - Атмосферный канал распространения излучения.
На фиг. 3 изображен ход световых лучей от выхода лазерного генератора 7 вспомогательного излучения до наземной части устройства 65 и обратно.
Плоскость чертежа на фиг. 3 совпадает с плоскостью падения луча e1-е на отражательное зеркало 22. Обозначения позиций элементов соответствуют обозначениям на фиг.1, фиг.2.
На фиг.4 представлена блок-схема третьего блока наведения 5 (на фиг.1), где обозначены следующие элементы:
23 - Двойной карданов подвес, состоящий из двух рам 68, 69.
70,71 - Шаговые электродвигатели.
22 - Отражательное зеркало.
24 - Блок управления.
На фиг.5 представлена схема конструктивного выполнения первого и второго блоков наведения (поз. 4, 31 на фиг.1, фиг.2). Цифрами обозначены следующие элементы.
18, 19 - Первое и второе поворотные зеркала.
72, 73 - Первый и второй узлы вращения.
74 - Основание блока наведения.
75, 76, 77 - Первый, второй и третий подшипники вращения.
20, 21 - Первый и второй блоки вращения на основе шаговых электродвигателей.
36 - Второй фотоприемный блок.
66 - Уголковый отражатель.
На фиг. 5а представлен вариант выполнения блока угловой компенсации 63 (на фиг.2). Цифрами обозначены элементы.
78 - Металлическая пластина.
79 - Пьезоэлементы.
64 - Блок управления.
На фиг. 6 представлена блок-схема второго варианта компоновки части устройства, реализующего способ, размещенной на борту платформы ЛА 1, где цифровые обозначения элементов соответствуют аналогичным позициям представленных чертежей фиг. 1-5. Позицией 81 обозначено вновь введенное отражательное малоразмерное зеркало, установленное на оптической оси А3-А1-А2. Второе отражательное зеркало 13 с отверстием в центре (см. фиг.2) в данном втором варианте компоновки отсутствует (исключено), а светоделительное зеркало 10 выполнено без отверстия в центре.
На фиг.7 представлена схема-блока обращения волнового фронта (поз. 29 на фиг. 1), на которой обозначены следующие элементы:
84 - первая кювета,
85 - вторая кювета,
86, 87 - первая и вторая проекционные линзы.
В предлагаемом способе и устройстве для его осуществления реализуют доставку рабочего излучения на объект, находящийся на космической околоземной орбите. Источник рабочего излучения (поз. 26 на фиг.1 и фиг.2) находится на поверхности земли (или на водной поверхности, например на палубе несущего корабля). Система наведения рабочего излучения на объект расположена на борту платформы летательного аппарата 1 (ЛА) и состоит из первого блока наведения 4 и ряда дополнительных управляющих элементов. Доставку излучения на объект осуществляют через атмосферный канал поз. 80 трассы распространения излучения. Основное влияние на параметры пучка распространяющегося в атмосфере излучения оказывает приземной слой атмосферы до высоты 1000-2000 м. Поэтому высокое качество компенсации атмосферной турбулентности можно реализовать по методу обращения волнового фронта (ОВФ) при расположении платформы летательного аппарата (ЛА) с источником излучения для инициирования ОВФ и системой наведения на высоте 10-20 км над поверхностью земли. В соответствии с этим в устройстве, реализующем способ, в качестве платформы ЛА 1 использован специально оборудованный самолет, находящийся в рабочем режиме в полете на высоте 10-15 км со скоростью Vп≤1000 км/час. При этом удаление от источника рабочего излучения (дальность по прямой линии А2-В4) составляет не более 20-30 км. При этом за счет использования ОВФ реализуют высокое качество компенсации атмосферных флуктуаций в канале распространения излучения между источником рабочего излучения 26 и платформой ЛА 1, в котором основной вклад в уровень флуктуаций и искажений излучения дает приземной слой атмосферы. Искажения рабочего излучения при его дальнейшем распространении от платформы ЛА 1 до объекта на высотах свыше 15000 м над землей практически отсутствуют. Формирование мощного рабочего излучения осуществляют путем обращения волнового фронта вспомогательного излучения, прошедшего до блока ОВФ 29 через атмосферный канал распространения 80 и усиленного в мощном квантовом усилителе - источнике рабочего излучения 26. Источником вспомогательного излучения в устройстве, реализующем способ, является специальный вновь введенный лазерный генератор вспомогательного излучения 7, размещенный на платформе ЛА 1. Формирование вспомогательного излучения, инициирующего ОВФ, осуществляют на борту платформы ЛА 1. Сформированное вспомогательное излучение с выхода лазерного генератора 7 вспомогательного излучения направляют на оптический вход второго блока наведения 31 (см. фиг.1), входящего в состав наземной части устройства 65, реализующего способ. Наведение вспомогательного излучения на оптическую ось источника рабочего излучения 26 - на вход второго блока наведения 31 - осуществляют посредством вновь введенного третьего блока наведения 5, расположенного на борту платформы ЛА 1. Задачей, выполняемой вторым и третьим блоками наведения 31, 5, является взаимное совмещение осей источника вспомогательного излучения - лазерного генератора 7 - и источника рабочего излучения 26. Эту операцию осуществляют до рабочего режима формирования вспомогательного и рабочего излучений. При осуществлении операций по взаимному наведению осей источников вспомогательного и рабочего излучений используют излучение первого 40 и второго 54 задающих генераторов.
После формирования рабочего излучения с обращенным волновым фронтом в блоке ОВФ 29 осуществляют наведение рабочего излучения на объект посредством первого блока наведения 4. Рабочее излучение от блока ОВФ 29 проходит в обратном ходе через квантовый усилитель - источник рабочего излучения 26, и далее через второй блок наведения 31, атмосферный канал и третий блок наведения 5 излучение поступает на вход первого блока наведения 4, посредством которого рабочее излучение направляют на объект в упрежденную точку встречи движущегося объекта и распространяющегося излучения.
Основными физическими объектами, над которыми осуществляют операции в предлагаемом способе, являются лазерные (световые) пучки, называемые также в тексте излучением, характеризуемые вектором направленности (или направления) оси диаграммы направленности излучения. В тексте для сокращения слова "диаграммы направленности" опускают и используют термин: вектор направления оси излучения, или вектор направления (направленности) оси источника излучения. Под последним понимают некоторый измеримый аппаратурный параметр источника излучения (лазера), характеризующий направление вектора оси излучения, которое будет сформировано данным источником излучения в рабочем режиме - в режиме генерации излучения. Вектор направленности оси является единичным вектором и характеризуется, например, угловыми координатами  направления своей оси относительно некоторой главной оси используемой системы координат или параметрами направляющих косинусов - проекций единичного вектора в Декартовой системе координат. В устройстве, реализующем способ, на борту ЛА 1 использована (выбрана) главная система координат с центром в первой заданной точке A1 пространства и главной осью А1-А2, совпадающей с продольной осью ЛА 1 и направлением вектора скорости
направления своей оси относительно некоторой главной оси используемой системы координат или параметрами направляющих косинусов - проекций единичного вектора в Декартовой системе координат. В устройстве, реализующем способ, на борту ЛА 1 использована (выбрана) главная система координат с центром в первой заданной точке A1 пространства и главной осью А1-А2, совпадающей с продольной осью ЛА 1 и направлением вектора скорости  ЛА 1 относительно источника рабочего излучения 26. Главная ось ЛА 1 А2-А1 соосна (является продолжением) оси А9-A8-А10 лазерного генератора вспомогательного излучения 7; таким образом, точки A9-A8-A7-A10-A1-A2 лежат на одной прямой и составляют главную ось части устройства, находящейся на борту платформы ЛА (см. фиг.2). Главная ось А2-А1 непосредственно переходит в ось А1-А3, являющуюся осью оптического входа первого блока наведения 4. Аналогично главная ось А2-А1 однозначно связана и переходит во входную оптическую ось первого фотоприемного блока 9 А1-А5 и А1-А6. Связь направления главной оси A2-А1 со входом первого фотоприемного блока 9 осуществлена посредством оптических элементов поз. 13, 14, 15, как показано на фиг.2.
ЛА 1 относительно источника рабочего излучения 26. Главная ось ЛА 1 А2-А1 соосна (является продолжением) оси А9-A8-А10 лазерного генератора вспомогательного излучения 7; таким образом, точки A9-A8-A7-A10-A1-A2 лежат на одной прямой и составляют главную ось части устройства, находящейся на борту платформы ЛА (см. фиг.2). Главная ось А2-А1 непосредственно переходит в ось А1-А3, являющуюся осью оптического входа первого блока наведения 4. Аналогично главная ось А2-А1 однозначно связана и переходит во входную оптическую ось первого фотоприемного блока 9 А1-А5 и А1-А6. Связь направления главной оси A2-А1 со входом первого фотоприемного блока 9 осуществлена посредством оптических элементов поз. 13, 14, 15, как показано на фиг.2.
Первый блок наведения 4 характеризуется своей входной осью (оптической) А1-А3, жестко связанной с главной осью А3-А1. Первый блок наведения 4 характеризуется выходной (оптической) осью А4-О3, направление которой в пространстве устанавливают с помощью блоков вращения 20, 21, а характеризуют вектором направленности выходной оси  определяемом, например, угловыми координатами ϕx, ϕy относительно неподвижной оси А3-A1, однозначно и жестко связанной с главной осью А2-А1. Действие первого блока наведения 4 (и других блоков наведения) можно характеризовать оператором, переводящим вектор направления входной оси А1-А3 в направление вектора выходной оси А4-О3. Направление в пространстве выходной оси первого блока наведения 4 совпадает с направлением распространения светового луча, который на входе в блок наведения 4 распространялся по направлению входной оси А1-А3.
определяемом, например, угловыми координатами ϕx, ϕy относительно неподвижной оси А3-A1, однозначно и жестко связанной с главной осью А2-А1. Действие первого блока наведения 4 (и других блоков наведения) можно характеризовать оператором, переводящим вектор направления входной оси А1-А3 в направление вектора выходной оси А4-О3. Направление в пространстве выходной оси первого блока наведения 4 совпадает с направлением распространения светового луча, который на входе в блок наведения 4 распространялся по направлению входной оси А1-А3.
Входная ось А1-А3 характеризуется единичным вектором направления  определяющим направление этой оси относительно первой заданной точки А1. Вектор
определяющим направление этой оси относительно первой заданной точки А1. Вектор  является также вектором направления входной оси первого фотоприемного блока 9
является также вектором направления входной оси первого фотоприемного блока 9  Соответственно вектор
Соответственно вектор  перпендикулярен вектору
перпендикулярен вектору  - единичному вектору направления главной оси А10-А1-А2.
- единичному вектору направления главной оси А10-А1-А2.
Формирование рабочего излучения, его наведение и доставку на объект осуществляют следующим образом.
В некоторый произвольный момент времени t0 осуществляют определение координат объекта  дальности до объекта R0(t0) и скорости объекта
дальности до объекта R0(t0) и скорости объекта  относительно первой заданной точки A1. Точка А1 является центром системы координат, связанной с платформой летательного аппарата (ЛА) 1. Собственно система координат может быть выбрана Декартовой (прямоугольной), сферической, цилиндрической или любой другой. В дальнейшем будем использовать прямоугольную систему координат, связанную с точкой А1, при этом пространственные координаты объекта будем характеризоваться дальностью R0 до объекта и направлением единичного вектора
относительно первой заданной точки A1. Точка А1 является центром системы координат, связанной с платформой летательного аппарата (ЛА) 1. Собственно система координат может быть выбрана Декартовой (прямоугольной), сферической, цилиндрической или любой другой. В дальнейшем будем использовать прямоугольную систему координат, связанную с точкой А1, при этом пространственные координаты объекта будем характеризоваться дальностью R0 до объекта и направлением единичного вектора  направленного от платформы ЛА (точка А1) в точку расположения объекта. Вследствие движения ЛА относительно источника рабочего излучения 26, находящегося на земле, и относительно объекта в системе координат А1, неподвижной относительно платформы ЛА, как объект, так и источник рабочего излучения 26 являются движущимися элементами. В дальнейшем первая заданная точка А1 обозначает и систему координат, связанную с ЛА. Для определения координат объекта выходную (визирную) ось первого блока наведения (см. фиг.2) направляют на область пространства, в которой предполагается нахождение объекта. Данную операцию осуществляют на основе информации о предполагаемых координатах объекта, которая поступает от системы внешнего целеуказания 43 через блоки связи 42, 25 на борт ЛА и далее через блок обработки информации 6 на блоки вращения 20, 21 поворотных зеркал 18, 19. Выходная (визирная) ось первого блока наведения 4 представляет собой прямую, проходящую через точку А4 - центр второго поворотного зеркала 19 - в плоскости, перпендикулярной плоскости зеркала 19 и под углом 45o к нормали
направленного от платформы ЛА (точка А1) в точку расположения объекта. Вследствие движения ЛА относительно источника рабочего излучения 26, находящегося на земле, и относительно объекта в системе координат А1, неподвижной относительно платформы ЛА, как объект, так и источник рабочего излучения 26 являются движущимися элементами. В дальнейшем первая заданная точка А1 обозначает и систему координат, связанную с ЛА. Для определения координат объекта выходную (визирную) ось первого блока наведения (см. фиг.2) направляют на область пространства, в которой предполагается нахождение объекта. Данную операцию осуществляют на основе информации о предполагаемых координатах объекта, которая поступает от системы внешнего целеуказания 43 через блоки связи 42, 25 на борт ЛА и далее через блок обработки информации 6 на блоки вращения 20, 21 поворотных зеркал 18, 19. Выходная (визирная) ось первого блока наведения 4 представляет собой прямую, проходящую через точку А4 - центр второго поворотного зеркала 19 - в плоскости, перпендикулярной плоскости зеркала 19 и под углом 45o к нормали  этого зеркала. На фиг.2 выходная ось первого блока наведения 4 условно показана в виде прямой, проведенной из точки А4 в точку О3 предполагаемого нахождения объекта. Поворотные зеркала 18, 19 работают в режиме постоянного угла ϕпад падения излучения на поверхность зеркала, равного ϕпад = 45°. С помощью блоков вращения 20, 21 осуществляют поворот зеркал 18, 19 по двум взаимно перпендикулярным осям, а именно: по азимутальной оси ϕAZ с помощью блока 20 и по оси угла места ϕM с помощью блока вращения 21. В результате этого выходная ось А4-О3 может быть развернута и установлена в любом заданном пространственном направлении. Для определения параметров движения объекта осуществляют его подсвет с помощью лазера подсвета цели 11, диаграмма направленности которого перекрывает зону предполагаемого нахождения объекта. Отраженное от объекта излучение поступает в обратном ходе на вход первого блока наведения 4 и далее распространяется вдоль оптической оси А4-А3-A1-А5 (см. фиг. 2) и поступает на вход первого фотоприемного блока 9. Изображение картинной плоскости объекта в пределах зоны нахождения объекта, подсвеченной лазером подсвета цели 11, формируют в плоскости фоточувствительной площадки второго многоэлементного фотоприемника 46 с помощью второго объектива 44. Одновременно изображение центральной части зоны нахождения объекта в увеличенном масштабе формируют на входе третьего многоэлементного фотоприемника 47 с помощью третьего объектива 45.
этого зеркала. На фиг.2 выходная ось первого блока наведения 4 условно показана в виде прямой, проведенной из точки А4 в точку О3 предполагаемого нахождения объекта. Поворотные зеркала 18, 19 работают в режиме постоянного угла ϕпад падения излучения на поверхность зеркала, равного ϕпад = 45°. С помощью блоков вращения 20, 21 осуществляют поворот зеркал 18, 19 по двум взаимно перпендикулярным осям, а именно: по азимутальной оси ϕAZ с помощью блока 20 и по оси угла места ϕM с помощью блока вращения 21. В результате этого выходная ось А4-О3 может быть развернута и установлена в любом заданном пространственном направлении. Для определения параметров движения объекта осуществляют его подсвет с помощью лазера подсвета цели 11, диаграмма направленности которого перекрывает зону предполагаемого нахождения объекта. Отраженное от объекта излучение поступает в обратном ходе на вход первого блока наведения 4 и далее распространяется вдоль оптической оси А4-А3-A1-А5 (см. фиг. 2) и поступает на вход первого фотоприемного блока 9. Изображение картинной плоскости объекта в пределах зоны нахождения объекта, подсвеченной лазером подсвета цели 11, формируют в плоскости фоточувствительной площадки второго многоэлементного фотоприемника 46 с помощью второго объектива 44. Одновременно изображение центральной части зоны нахождения объекта в увеличенном масштабе формируют на входе третьего многоэлементного фотоприемника 47 с помощью третьего объектива 45.
Посредством фотоприемников 46, 47 осуществляют определение угловых координат Θox, Θoy направления на объект относительно неподвижной оси А1-А3. При этом многоэлементный фотоприемник 46 осуществляет определение координат объекта  в широком угловом поле зрения - в пределах всей зоны пространства, подсвеченной лазером подсвета цели 11, а фотоприемник 47 осуществляет определение координат в узком поле зрения с высокой точностью. Точки А6, A5 определяют центры площадок многоэлементных фотоприемников 46, 47 и соответствуют первой заданной точке A1. Координаты объекта с помощью фотоприемников 46, 47 определяют по величине смещения Δx, Δy фоточувствительного элемента многоэлементного фотоприемника 46, 47 относительно его центра A5, А6, в котором уровень принятого сигнала от объекта превысил некоторый установленный порог. Координаты объекта при этом будут равны следующим величинам:
в широком угловом поле зрения - в пределах всей зоны пространства, подсвеченной лазером подсвета цели 11, а фотоприемник 47 осуществляет определение координат в узком поле зрения с высокой точностью. Точки А6, A5 определяют центры площадок многоэлементных фотоприемников 46, 47 и соответствуют первой заданной точке A1. Координаты объекта с помощью фотоприемников 46, 47 определяют по величине смещения Δx, Δy фоточувствительного элемента многоэлементного фотоприемника 46, 47 относительно его центра A5, А6, в котором уровень принятого сигнала от объекта превысил некоторый установленный порог. Координаты объекта при этом будут равны следующим величинам:
Θx = Θox+ϕAZ (1)
Θy = Θoy+ϕM
где Θox = Δx•f
Величины Δx, Δy - координаты элемента (ячейки) в многоэлементном фотоприемнике 46, 47, в котором превышен пороговый уровень сигнала. (Δx и Δy отсчитывают от центра - точки А5, А6).
fл - эквивалентное фокусное расстояние объективов 44 или 45.
Величины ϕAZ и ϕM определяют угол поворота оси А3-А4 относительно неподвижной оси А3-А1 (ϕAZ) и, соответственно, угол поворота выходной оси А4-О3 относительно оси А3-А4.
Как было отмечено, многоэлементные фотоприемники 46, 47 определяют координаты объекта согласно (1) соответственно со средней (46) и с высокой точностью (фотоприемник 47). В дальнейшем в тексте описания не делается различия между параметрами, выдаваемыми фотоприемниками 46 или 47, так как операции по использованию этой информации являются одинаковыми. При этом предполагается, что на более поздних операциях по определению координат объекта и параметров световых пучков для получения более высокой точности используют информацию, выдаваемую многоэлементным фотоприемником 47, работающим с высокой точностью в узком поле зрения. Информация об измеренных координатах объекта Θx,y с выходов многоэлементных фотоприемников 46, 47 поступает в блок обработки информации 6. При этом информация о величинах углов ϕAZ и ϕM поступает в блок 6 от блоков вращения 20, 21, от соответствующих датчиков углов поворота, которыми снабжены блоки 20, 21. Таким образом, координаты вектора направления на объект  складываются из координат (угловых) вектора
складываются из координат (угловых) вектора  относительно неподвижной оси А1-А3 (определяемых фотоприемниками 46, 47) и координат направления визирной оси А4-О3
относительно неподвижной оси А1-А3 (определяемых фотоприемниками 46, 47) и координат направления визирной оси А4-О3 определяемые и задаваемые блоками вращения 20, 21. Первый фотоприемный блок 9 осуществляет, таким образом, определение координат (угловых) единичного вектора направления на объект
определяемые и задаваемые блоками вращения 20, 21. Первый фотоприемный блок 9 осуществляет, таким образом, определение координат (угловых) единичного вектора направления на объект  относительно вектора
относительно вектора  направления оси А1-А3, т.е. координаты (угловые) вектора разности
направления оси А1-А3, т.е. координаты (угловые) вектора разности  - единичный вектор абсолютного направления на объект относительно внешней независимой системы координат, например, относительно источника рабочего излучения 26. При
- единичный вектор абсолютного направления на объект относительно внешней независимой системы координат, например, относительно источника рабочего излучения 26. При  имеем
имеем  т.е. измеряемый вектор
т.е. измеряемый вектор  является нуль - вектором, если вектор
является нуль - вектором, если вектор  абсолютного направления на объект совпадает (параллелен) вектору направления оси
абсолютного направления на объект совпадает (параллелен) вектору направления оси  Представленное соотношение
Представленное соотношение  является определением выполняемой первым фотоприемным блоком 9 операции определения координат
является определением выполняемой первым фотоприемным блоком 9 операции определения координат  относительно оси A1-А3 в системе координат, связанной с первой заданной точкой А1.
относительно оси A1-А3 в системе координат, связанной с первой заданной точкой А1.
Дальность до объекта Rо определяют также в фотоприемниках 46, 47 по моменту прихода импульса излучения, отраженного от объекта, относительно момента времени излучения данного импульса лазером подсвета цели 11. Информация о величине Ro также поступает в блок обработки 6 от фотоприемников 46, 47 и от лазера подсвета цели 11 в виде моментов времени излучения и приема сигналов от объекта. Поляризация излучения от лазера подсвета цели 11 выбрана такой, что это излучение свободно проходит через светоделительное зеркало 10 (с отверстием в центре). Данное светоделительное зеркало 10 выполнено со специальным светоделительным поляризационным покрытием, пропускающим излучение от объекта с вектором поляризации, лежащим, например, в плоскости зеркала 10. Рабочее излучение, поступающее от источника рабочего излучения 26, и после отражения от зеркала 22, имеет поляризацию, перпендикулярную поляризации излучения от объекта. Рабочее излучение не пропускается светоделительным зеркалом 10, а отражается от него на вход первого блока наведения 4.
С помощью блока наведения 4, лазера подсветки цели 11, работающего в импульсно-периодическом режиме излучения, первого фотоприемного блока 9 и блока обработки информации 6, осуществляют непрерывное слежение за объектом, определение его текущих координат, начиная от момента времени to, а также определяют и вычисляют тангенциальную составляющую скорости Vot объекта по формуле
где  и
и  - угловые координаты объекта в последовательные моменты времени to и to+Δt;
- угловые координаты объекта в последовательные моменты времени to и to+Δt;
Δt - малый фиксированный промежуток времени;
Ro(to) - дальность до объекта, измеренная в момент времени to .
Радиальную скорость объекта измеряют, например, на основе определения изменения дальности до объекта ΔR за малый промежуток времени Δt. Полученные и измеренные данные определяют координаты и вектор скорости объекта  относительно первой заданной точки пространства А1 в момент времени to. На основании этих данных осуществляют прогнозирование и определение координат объекта
относительно первой заданной точки пространства А1 в момент времени to. На основании этих данных осуществляют прогнозирование и определение координат объекта  для любого заданного последующего момента времени t на основании следующего векторного соотношения:
для любого заданного последующего момента времени t на основании следующего векторного соотношения:
где С - скорость света;  - единичный вектор координат объекта относительно точки А1 в момент времени to;
- единичный вектор координат объекта относительно точки А1 в момент времени to;  - скорость объекта в момент t0 относительно точки A1;
- скорость объекта в момент t0 относительно точки A1;  - вектор координат объекта относительно точки А1 в момент времени t>to.
- вектор координат объекта относительно точки А1 в момент времени t>to.
Скорость объекта  считают постоянной величиной, так как определение координат и наведение излучения на объект осуществляют за достаточно малые промежутки времени. Возможно использование также других эмпирических и вероятностных методов прогнозирования положения объекта в некоторой ожидаемой точке
считают постоянной величиной, так как определение координат и наведение излучения на объект осуществляют за достаточно малые промежутки времени. Возможно использование также других эмпирических и вероятностных методов прогнозирования положения объекта в некоторой ожидаемой точке  , координаты которой определяют на основании измеренных координат объекта
, координаты которой определяют на основании измеренных координат объекта  в момент времени to.
в момент времени to.
Промежуток времени (t-to), необходимый для наведения рабочего излучения в точку ожидаемого нахождения объекта  , определяют в блоке обработки информации 6 на основании определения расстояния Н между платформой ЛА и источником рабочего излучения 26 (на фиг.2). Данное расстояние Н принимается равным расстоянию между первой заданной точкой A1 на платформе ЛА и точкой В1, определяющей центр отражательного зеркала 39 (с отверстием в центре) (см. фиг.1).
, определяют в блоке обработки информации 6 на основании определения расстояния Н между платформой ЛА и источником рабочего излучения 26 (на фиг.2). Данное расстояние Н принимается равным расстоянию между первой заданной точкой A1 на платформе ЛА и точкой В1, определяющей центр отражательного зеркала 39 (с отверстием в центре) (см. фиг.1).
Величину расстояния Н получают, например, по данным внешнего целеуказания от системы ВЦУ 43, которая непрерывно выдает информацию о параметрах движения платформы ЛА 1 через блоки связи 25, 42 на вход блока обработки информации 6. При этом в блок обработки информации 6 поступают данные о величине расстояния Н(t) в любой текущий и будущий момент времени t.
Возможно определение расстояния Н локационным методом с использованием расположенного на борту ЛА и входящего в состав лазерного генератора вспомогательного излучения 7 второго задающего генератора 54. Импульс излучения от задающего генератора 54 направляют с помощью третьего блока наведения 5 в сторону источника рабочего излучения 26 (см. фиг.2). Прием импульса осуществляют с помощью второго фотоприемного блока 36, сигнал с выхода которого поступает во второй блок обработки информации 30. Момент излучения импульса генератором 54 и приема фотоприемным блоком 36 сравнивают в блоках обработки информации 6 и 30 с текущими сигналами единого времени, поступающими от системы внешнего целеуказания 43. На основании этого сравнения определяют в блоке 30 промежуток времени между излучением и приемом импульса в фотоприемном блоке 36, определяющий расстояние Н. Эта информация по каналу связи 42-25 поступает на борт ЛА. Возможен также прием излученного задающим генератором 54 импульса после отражения его от источника рабочего излучения 26 первым фотоприемным блоком 9 и определения на этой основе расстояния Н в блоке обработки информации 6 по сигналу, поступающему от фотоприемного блока 9. При этом излучение второго задающего генератора 54 отражается от уголкового отражателя 66, расположенного на входе второго блока наведения 31, т.е. в непосредственной близости от источника рабочего излучения 26. (Расстояние между уголковым отражателем 66 и источником рабочего излучения 26 фиксировано и известно).
Информация о расстоянии Н характеризует промежуток времени T=2H/C между формированием импульса вспомогательного излучения с помощью лазерного генератора вспомогательного излучения 7 и приходом в первую заданную точку A1 на платформу ЛА импульса рабочего излучения с обращенным волновым фронтом. На основании информации о промежутке времени T=2H/C и ранее определенных координатах объекта  Ro(to) и
Ro(to) и  в момент времени to определяют координаты
в момент времени to определяют координаты  точки О3 ожидаемого нахождения объекта в некоторый будущий прогнозируемый момент времени t3. В направлении на эту точку О3 с направлением вектора
точки О3 ожидаемого нахождения объекта в некоторый будущий прогнозируемый момент времени t3. В направлении на эту точку О3 с направлением вектора  осуществляют разворот выходной оси первого блока наведения 4 (ось А4-О3 на фиг.2). Первый блок наведения 4 переводят в режим слежения за некоторой точкой О3 предполагаемого нахождения объекта в прогнозируемый момент времени t3 доставки излучения на объект.
осуществляют разворот выходной оси первого блока наведения 4 (ось А4-О3 на фиг.2). Первый блок наведения 4 переводят в режим слежения за некоторой точкой О3 предполагаемого нахождения объекта в прогнозируемый момент времени t3 доставки излучения на объект.
Режим слежения первого блока наведения 4 характеризуется следующими временными соотношениями:
Момент прихода t3 рабочего излучения на объект равен
t3 = to1 + T + t02 (3),
где to1 - момент излучения импульса вспомогательного излучения лазерным генератором 7;
Т - промежуток времени T=2H/C (4);
tо2 - промежуток времени распространения рабочего излучения от первой заданной точки А1 до точки нахождения объекта О3 в момент времени t3.
Координаты точки  ожидаемого нахождения объекта в прогнозируемый момент времени t3, а также значение этого момента времени относительно to определяют на основе решения следующей системы из четырех уравнений, соответствующих векторному соотношению (2):
ожидаемого нахождения объекта в прогнозируемый момент времени t3, а также значение этого момента времени относительно to определяют на основе решения следующей системы из четырех уравнений, соответствующих векторному соотношению (2):
 i=1, 2, 3.
i=1, 2, 3.
В системе уравнений (5) неизвестными величинами являются t3, Θ31,Θ32,Θ33.
Здесь  - единичный вектор координат объекта в момент времени to;
- единичный вектор координат объекта в момент времени to;  = (Vo1; Vo2; Vo3); Ro(to) - соответственно вектор скорости объекта и дальность до объекта в момент времени to.
= (Vo1; Vo2; Vo3); Ro(to) - соответственно вектор скорости объекта и дальность до объекта в момент времени to.
Момент времени t2 в (5) соответствует приходу импульса рабочего излучения с обращенным волновым фронтом в первую заданную точку А1.
Величина t3-t2=to2. Отсюда и из (3) момент времени t2 равен
t2 = to1 + T = to1 + 2H/C (6),
где to1 - момент времени формирования импульса вспомогательного излучения лазерным генератором вспомогательного излучения 7. Все моменты времени отсчитываются от начального момента времени tо определения координат объекта, который может быть принят равным нулю to=0.
Таким образом, режим слежения за упрежденной точкой О3 ожидаемого нахождения объекта характеризуется следующими операциями:
1). В некоторый произвольный момент времени tо определяют координаты  и параметры движения объекта
и параметры движения объекта  Ro(to).
Ro(to).
2). Определяют промежуток времени T=2H/C на основе информации о расстоянии между платформой ЛА и источником рабочего излучения, находящимся на земле для момента времени to и последующих моментов времени.(to1....).
3). Выбирают априорно момент времени запуска лазерного генератора 7, равный to1>tо.
Для этого момента времени to1 определяют величину Н(to1) и на основании (6) и системы уравнений (5) вычисляют в блоке обработки информации 6 параметры единичного  направления из первой заданной точки А1 в точку О3 ожидаемого нахождения объекта. По полученным величинам
направления из первой заданной точки А1 в точку О3 ожидаемого нахождения объекта. По полученным величинам  в блоке обработки информации 6 вырабатывают управляющие сигналы, поступающие на блоки вращения 20, 21, в результате чего обеспечивают направление выходной оси А4-О3 первого блока наведения 4 в точку ожидаемого нахождения объекта с координатами
в блоке обработки информации 6 вырабатывают управляющие сигналы, поступающие на блоки вращения 20, 21, в результате чего обеспечивают направление выходной оси А4-О3 первого блока наведения 4 в точку ожидаемого нахождения объекта с координатами 
Режим слежения за объектом обеспечивается контуром наведения, в который входят следующие элементы, находящиеся на борту ЛА 1:
- первый блок наведения 4, выходная ось которого А4-О3 является управляемой;
- первый фотоприемный блок 9, определяющий текущие координаты объекта относительно точки A1 и неподвижной оси A1-А3, информация о которых поступает в блок 6;
- блок обработки информации 6, осуществляющий анализ текущего положения объекта, определение прогнозируемых координат объекта, определение на основе (5), (6) координат  точки ожидаемого положения объекта и выработку управляющих сигналов, поступающих в блоки вращения 20, 21 для направления выходной оси первого блока наведения 4 в указанную точку ожидаемого нахождения объекта с координатами
точки ожидаемого положения объекта и выработку управляющих сигналов, поступающих в блоки вращения 20, 21 для направления выходной оси первого блока наведения 4 в указанную точку ожидаемого нахождения объекта с координатами 
В данном установленном режиме слежения за упрежденной точкой О3 ожидаемого нахождения объекта, когда выходная ось первого блока наведения 4 направлена в указанную точку О3, исходное видимое изображение объекта в момент времени to (точечное) будет смещено в плоскости фоточувствительной площадки первого фотоприемного блока 9 на величину  которая в угловых единицах равна
которая в угловых единицах равна
Здесь, как и ранее, скорость объекта  полагаем постоянной в пределах времени слежения и наведения излучения. (Величина t3 определяется из (5) по заданным величинам to1 и H(to1);
полагаем постоянной в пределах времени слежения и наведения излучения. (Величина t3 определяется из (5) по заданным величинам to1 и H(to1); 
Величина  характеризует угловое смещение точечного изображения объекта за промежуток времени t3-to.
характеризует угловое смещение точечного изображения объекта за промежуток времени t3-to.
Далее согласно предлагаемому способу перед формированием вспомогательного излучения осуществляют наведение оси источника вспомогательного излучения на ось источника рабочего излучения 26, находящегося на земле. Для этого используют излучение второго задающего генератора 54, входящего в состав лазерного генератора вспомогательного излучения 7, причем генерацию собственно вспомогательного излучения посредством источника излучения 49 не производят. Излучение задающего генератора 54 осуществляет провешивание оси вспомогательного излучения без его генерации. Задающий генератор 54 формирует узкий пучок, проходящий через диафрагму 55 и поступающий в точку А7, совмещенную (или близко расположенную по оси) с фокусом Фурье-линзы 51. Последняя формирует плоский световой пучок, распространяющийся строго по оси А7-А10 лазерного генератора 7 и определяющий эту ось. Подробнее работа лазерного генератора 7 описана ниже. Сформированный световой пучок проходит через отверстия в зеркалах 13, 10, через дефлектор 8, находящийся вначале в положении нулевого отклонения пучка, далее отражательным зеркалом 22 третьего блока наведения 5 сформированный пучок отклоняют и направляют (как показано на фиг. 2) на источник рабочего излучения 26. Световой пучок поступает на оптический вход второго фотоприемного блока 36 и регистрируется в виде светового пятна, сфокусированного объективом 37 на входе первого многоэлементного фотоприемника 38. Второй фотоприемный блок 36 размещен непосредственно на четвертом поворотном зеркале 33 таким образом, что визирная ось данного фотоприемного блока 36 и выходная ось второго блока наведения 31 являются параллельными. При перемещении (вращении) поворотного зеркала 33 указанные оси перемещаются в пространстве совместно и остаются параллельными. Наведение оси источника вспомогательного излучения осуществляют путем последовательного изменения направления в пространстве осей второго и третьего блоков наведения 31 и 5. Критерием достижения оптимального результата наведения принимают установление пятна от излучения второго задающего генератора 54 в центре фоточувствительной площадки второго фотоприемного блока 38. Это достигают путем подачи соответствующих управляющих сигналов от блоков обработки информации 30, 6 в блоки вращения 34, 35 и блок управления 24 третьим блоком наведения 5. Информация о результате наведения и положения светового пятна поступает с выхода второго фотоприемного блока 36 во второй блок обработки информации 30, а через него и блоки связи 42, 25 в первый блок информации 6. Далее второй блок наведения 31 осуществляет режим слежения за платформой ЛА по критерию нахождения светового пятна от второго задающего генератора 54 в центре фоточувствительной площадки второго фотоприемного блока 36.
Для осуществления этого режима слежения образуют контур управления, в который входят следующие элементы: второй задающий генератор 54, второй фотоприемный блок 36; второй блок обработки информации 30; второй блок наведения 31.
Третий блок наведения 5 также устанавливают в положение, обеспечивающее указанное положение светового пятна в фотоприемном блоке 36. В результате ось лазерного генератора 7 источника вспомогательного излучения А7-А10 устанавливают соосно выходной оси второго блока наведения 31 В4-В5, а следовательно, и соосно оси В1-В2 источника рабочего излучения 26, 29 (см. фиг.1). Действительно, излучение второго задающего генератора 54, ось которого совпадает с направлением оси А7-А10 лазерного генератора 7 из точки A7, распространяется по следующему направлению (см. фиг.1 и фиг.2):
A7-A10-A1-A2-B5-B4-B3-B1-B2.
Таким образом, оси лазерного генератора вспомогательного излучения 7 и источника рабочего излучения 26, 29 В1-В2 являются взаимно совмещенными.
Далее осуществляют определение пространственных координат  вектора направленности оси источника рабочего излучения в системе координат относительно первой заданной точки пространства А1 в момент времени t1. Определение координат указанного вектора осуществляют следующим способом. Осуществляют формирование (генерацию) зондирующего лазерного излучения посредством первого задающего генератора 40, входящего в состав части аппаратуры устройства, регистрирующего способ, 65 расположенного на земле (см. фиг.1). Формирующая линза 41 формирует параллельный световой поток, центральная часть которого проходит через небольшое отверстие (диаметр 2-5 мм) в центре отражательного зеркала 39. Далее лазерное излучение распространяется по направлению, указанному на фиг.1 и фиг.2 точками В1-B3-B4-B5-А2-A1. Таким образом, излучение первого задающего генератора 40 определяет (материализует) направление оси рабочего излучения, которое далее будет сформировано в результате совместной работы лазерного генератора вспомогательного излучения 7, источника рабочего излучения 26 и блока ОВФ 29.
вектора направленности оси источника рабочего излучения в системе координат относительно первой заданной точки пространства А1 в момент времени t1. Определение координат указанного вектора осуществляют следующим способом. Осуществляют формирование (генерацию) зондирующего лазерного излучения посредством первого задающего генератора 40, входящего в состав части аппаратуры устройства, регистрирующего способ, 65 расположенного на земле (см. фиг.1). Формирующая линза 41 формирует параллельный световой поток, центральная часть которого проходит через небольшое отверстие (диаметр 2-5 мм) в центре отражательного зеркала 39. Далее лазерное излучение распространяется по направлению, указанному на фиг.1 и фиг.2 точками В1-B3-B4-B5-А2-A1. Таким образом, излучение первого задающего генератора 40 определяет (материализует) направление оси рабочего излучения, которое далее будет сформировано в результате совместной работы лазерного генератора вспомогательного излучения 7, источника рабочего излучения 26 и блока ОВФ 29.
Диаметр светового пучка данного излучения, принимаемого на борту ЛА 1, определяется диаметром зеркал 22, 10, 13. Поляризация данного излучения выбрана такой, при которой светоделительное зеркало 10 работает в режиме пропускания излучения. Зондирующее лазерное излучение далее проходит по направлению, обозначенному точками A1-А10-А11, через светоделительное зеркало 10, отражается от второго отражательного зеркала 13, на вход второй фокусирующей линзы 14, которая фокусирует световой поток в плоскость третьего отражательного зеркала 15. Далее световой поток отражается в точке А11, совмещенной с фокусом второй фокусирующей линзы 14 и в обратном ходе проходит по направлению, обозначенному точками А11-А10-А1-A5, А6, поступает на вход первого фотоприемного блока 9 и фокусируется в плоскости фоточувствительных площадок (точки A5, А6) многоэлементных фотоприемников 46, 47.
С помощью первого фотоприемного блока 9 осуществляют определение угловых координат  вектора направления оси рабочего излучения в системе координат, связанной с первой заданной точкой А1 в соответствии с соотношением:
вектора направления оси рабочего излучения в системе координат, связанной с первой заданной точкой А1 в соответствии с соотношением:
где Δxp, Δyp - отклонение светового пятна от зондирующего излучения задающего генератора 40 в плоскости фотоприемников 46,47 от центра (точки A5, А6); fл - фокусное расстояние объективов 44, или 44, 45 для грубого и точного определения угловых координат в первом фотоприемном блоке 9 (см. фиг. 2). Полученные координаты  являются, как было показано выше, координатами разностного вектора
являются, как было показано выше, координатами разностного вектора  и характеризуют отклонение вектора направленности оси рабочего излучения от направления вектора
и характеризуют отклонение вектора направленности оси рабочего излучения от направления вектора  оси A1-А3 при распространении рабочего излучения по направлению А2-А1-А3 на оптический вход первого блока наведения 4.
оси A1-А3 при распространении рабочего излучения по направлению А2-А1-А3 на оптический вход первого блока наведения 4.
Далее согласно предлагаемому способу определяют координаты первого вектора разности  между координатами
между координатами  точки ожидаемого нахождения объекта и координатами вектора направленности
точки ожидаемого нахождения объекта и координатами вектора направленности  оси источника рабочего излучения относительно первой заданной точки пространства А1:
оси источника рабочего излучения относительно первой заданной точки пространства А1:
Данную операцию осуществляют с помощью первого блока обработки информации 6. Полученные угловые координаты первого вектора разности  характеризуют угловые координаты первой уточненной точки ожидаемого нахождения объекта
характеризуют угловые координаты первой уточненной точки ожидаемого нахождения объекта  , в направлении которой учтены как параметры точки
, в направлении которой учтены как параметры точки  ожидаемого нахождения объекта вследствие его движения, так и параметры рассогласования оси рабочего излучения
ожидаемого нахождения объекта вследствие его движения, так и параметры рассогласования оси рабочего излучения  относительно входной оси А1-А3 первого блока наведения 4, задаваемой вектором
относительно входной оси А1-А3 первого блока наведения 4, задаваемой вектором  Для компенсации последнего согласно способу далее осуществляют наведение выходной оси первого блока наведения в первую уточненную точку ожидаемого нахождения объекта с координатами
Для компенсации последнего согласно способу далее осуществляют наведение выходной оси первого блока наведения в первую уточненную точку ожидаемого нахождения объекта с координатами  равными первому вектору разности
равными первому вектору разности 

Этим осуществляют наведение реального направления оси источника рабочего излучения из первой заданной точки A1 точно в точку  ожидаемого нахождения объекта. Действительно, первый блок наведения 4 осуществляет операцию преобразования (перевода) направления неподвижной прямой А1-А3 (см. фиг.2) в направление прямой А4-О3, направленной в точку ожидаемого нахождения объекта О3 с координатами вектора
ожидаемого нахождения объекта. Действительно, первый блок наведения 4 осуществляет операцию преобразования (перевода) направления неподвижной прямой А1-А3 (см. фиг.2) в направление прямой А4-О3, направленной в точку ожидаемого нахождения объекта О3 с координатами вектора  направления в эту точку, полученными ранее в соответствии с (5). Алгоритм действия первого блока наведения 4 можно представить оператором Р1:
направления в эту точку, полученными ранее в соответствии с (5). Алгоритм действия первого блока наведения 4 можно представить оператором Р1:
где  - вектор направления оси светового пучка на входе первого блока наведения 4 относительно точки А1;
- вектор направления оси светового пучка на входе первого блока наведения 4 относительно точки А1; - вектор управления вращения оси А1-А3, осуществляемого поворотными зеркалами 19, 18 относительно неподвижной оси A1-А3;
- вектор управления вращения оси А1-А3, осуществляемого поворотными зеркалами 19, 18 относительно неподвижной оси A1-А3; - вектор направления оси светового пучка на выходе первого блока наведения 4, при
- вектор направления оси светового пучка на выходе первого блока наведения 4, при  и
и 
При нулевых величинах (8) угловых координат  вектора направления оси рабочего излучения вектор направления
вектора направления оси рабочего излучения вектор направления  на выходе блока наведения 4 будет иметь следующие угловые координаты, в соответствии с (11) вследствие ранее установленного направления выходной оси блока наведения 4
на выходе блока наведения 4 будет иметь следующие угловые координаты, в соответствии с (11) вследствие ранее установленного направления выходной оси блока наведения 4 
 .
.
Для получения  необходимо обеспечить выполнение соотношения
необходимо обеспечить выполнение соотношения  , отсюда
, отсюда ,
,
что совпадает с (10) при 
Для точного наведения оси рабочего излучения в точку ожидаемого нахождения объекта с координатами  осуществляют установление выходной оси первого блока наведения 4 (вектора вращения
осуществляют установление выходной оси первого блока наведения 4 (вектора вращения  оси А1-А3) в соответствии с величиной
оси А1-А3) в соответствии с величиной  Далее осуществляют наведение оси первого блока наведения 4 в первую уточненную точку
Далее осуществляют наведение оси первого блока наведения 4 в первую уточненную точку  ожидаемого нахождения объекта
ожидаемого нахождения объекта  в соответствии с (10). Для выполнения этой операции на блоки вращения 20, 21 с выхода блока обработки информации 6 поступают управляющие сигналы, обеспечивающие разворот и направление выходной оси первого блока наведения 4 в соответствии с величиной
в соответствии с (10). Для выполнения этой операции на блоки вращения 20, 21 с выхода блока обработки информации 6 поступают управляющие сигналы, обеспечивающие разворот и направление выходной оси первого блока наведения 4 в соответствии с величиной  относительно неподвижной оси А1-А3. Этим обеспечивают наведение указанной выходной оси первого блока наведения 4 в первую уточненную точку ожидаемого нахождения объекта
относительно неподвижной оси А1-А3. Этим обеспечивают наведение указанной выходной оси первого блока наведения 4 в первую уточненную точку ожидаемого нахождения объекта  При этом собственно ось рабочего излучения будет направлена из точки А1 точно в точку
При этом собственно ось рабочего излучения будет направлена из точки А1 точно в точку  ожидаемого нахождения объекта с учетом того, что рабочее излучение от источника рабочего излучения 26 будет распространяться по направлению вектора
ожидаемого нахождения объекта с учетом того, что рабочее излучение от источника рабочего излучения 26 будет распространяться по направлению вектора  имеющего относительно точки А1 и неподвижной оси А1-А3 угловой сдвиг, характеризуемый координатами (8), измеренными первым фотоприемным блоком 9. Таким образом, определение в единой системе координат, связанной с первой заданной точкой A1, направления вектора оси источника рабочего излучения
имеющего относительно точки А1 и неподвижной оси А1-А3 угловой сдвиг, характеризуемый координатами (8), измеренными первым фотоприемным блоком 9. Таким образом, определение в единой системе координат, связанной с первой заданной точкой A1, направления вектора оси источника рабочего излучения  и ранее выполненное определение координат
и ранее выполненное определение координат  объекта и координат
объекта и координат  точки ожидаемого нахождения объекта обеспечивает наведение оси источника рабочего излучения на движущийся объект в динамическом режиме.
точки ожидаемого нахождения объекта обеспечивает наведение оси источника рабочего излучения на движущийся объект в динамическом режиме.
Первый блок наведения 4 переводят в режим слежения за первой уточненной точкой  ожидаемого нахождения объекта, в координатах которой учтены как пространственные координаты точки
ожидаемого нахождения объекта, в координатах которой учтены как пространственные координаты точки  так и реальные координаты оси
так и реальные координаты оси  источника рабочего излучения.
источника рабочего излучения.
Для выполнения этого режима от блока обработки информации 6 на блоки вращения 20, 21 непрерывно поступают управляющие сигналы, обеспечивающие разворот поворотных зеркал 18, 19 в соответствии с угловыми координатами (величинами) вектора управления  (13). При этом в параметрах вектора управления
(13). При этом в параметрах вектора управления  непрерывно учитывают координаты вектора
непрерывно учитывают координаты вектора  направления оси рабочего излучения в системе координат относительно точки А1, измеряемые первым фотоприемным блоком 9. Выполнение режима слежения за первой уточненной точкой ожидаемого нахождения объекта осуществляют с помощью контура наведения, в который входят следующие элементы: первый блок наведения 4, первый фотоприемный блок 9, первый блок обработки информации 6, блоки вращения 20, 21.
направления оси рабочего излучения в системе координат относительно точки А1, измеряемые первым фотоприемным блоком 9. Выполнение режима слежения за первой уточненной точкой ожидаемого нахождения объекта осуществляют с помощью контура наведения, в который входят следующие элементы: первый блок наведения 4, первый фотоприемный блок 9, первый блок обработки информации 6, блоки вращения 20, 21.
Далее согласно предлагаемому способу осуществляют контроль точности наведения излучения на объект путем определения вектора  ошибки наведения излучения на объект в момент прихода излучения на объект. После этого осуществляют компенсацию измеренной ошибки наведения путем наведения выходной оси первого блока наведения во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами
ошибки наведения излучения на объект в момент прихода излучения на объект. После этого осуществляют компенсацию измеренной ошибки наведения путем наведения выходной оси первого блока наведения во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами  , равными сумме координат
, равными сумме координат  первой уточненной точки ожидаемого нахождения объекта и координат вектора
первой уточненной точки ожидаемого нахождения объекта и координат вектора  ошибки наведения излучения на объект:
ошибки наведения излучения на объект:
Последовательно рассмотрим выполнение указанных операций, начиная от операции контроля точности наведения излучения на объект.
Для выполнения операции контроля точности наведения излучения осуществляют формирование импульса зондирующего излучения с помощью второго задающего генератора 54, который в этом случае имитирует работу всего лазерного генератора 7. Данный импульс зондирующего излучения формируют в момент времени tz=to1 в соответствии (6). Таким образом, момент генерации (формирования) импульса зондирующего излучения to1 соответствует моменту генерации импульса вспомогательного излучения лазерным генератором 7 в рабочем режиме по отношению к моменту времени to определения координат объекта. Момент времени tz=to1 следует за моментом времени t1 определения координат оси источника рабочего излучения  . Сформированный импульс зондирующего излучения проходит до источника рабочего излучения 26 по направлению, обозначенному точками A7-A10-A1-A2-В5-В4. Далее импульс отражается от уголкового отражателя 66 (см. фиг.1) и в обратном ходе, после отражений от зеркала 22 третьего блока наведения 5, светоделительного зеркала 10 и прохождения по направлению - А2-A1-А3-А4-O3 - направляется в сторону объекта. При этом генерации и формирования собственно импульса рабочего излучения блоками 26, 29 не осуществляют. Ширина сформированного светового пучка зондирующего излучения (угловая) является достаточно большой и перекрывает всю зону предполагаемого нахождения объекта вместе с возможными ошибками наведения. В соответствии с установленным ранее направлением выходной оси первого блока наведения 4 импульс зондирующего излучения направляют в точку ожидаемого нахождения объекта, при этом приход данного импульса на объект определяется моментом времени 13, вычисленном ранее. Импульс зондирующего излучения, отраженный от объекта, принимают и регистрируют с помощью первого фотоприемного блока 9. При этом регистрируют угловые координаты
. Сформированный импульс зондирующего излучения проходит до источника рабочего излучения 26 по направлению, обозначенному точками A7-A10-A1-A2-В5-В4. Далее импульс отражается от уголкового отражателя 66 (см. фиг.1) и в обратном ходе, после отражений от зеркала 22 третьего блока наведения 5, светоделительного зеркала 10 и прохождения по направлению - А2-A1-А3-А4-O3 - направляется в сторону объекта. При этом генерации и формирования собственно импульса рабочего излучения блоками 26, 29 не осуществляют. Ширина сформированного светового пучка зондирующего излучения (угловая) является достаточно большой и перекрывает всю зону предполагаемого нахождения объекта вместе с возможными ошибками наведения. В соответствии с установленным ранее направлением выходной оси первого блока наведения 4 импульс зондирующего излучения направляют в точку ожидаемого нахождения объекта, при этом приход данного импульса на объект определяется моментом времени 13, вычисленном ранее. Импульс зондирующего излучения, отраженный от объекта, принимают и регистрируют с помощью первого фотоприемного блока 9. При этом регистрируют угловые координаты  реального положения объекта в момент прихода на него импульса зондирующего излучения (t3) и момент времени t4 приема отраженного излучения от объекта. Вектор разности координат
реального положения объекта в момент прихода на него импульса зондирующего излучения (t3) и момент времени t4 приема отраженного излучения от объекта. Вектор разности координат  характеризует точность наведения излучения на объект. Момент времени t4 в соответствии с (6) равен
характеризует точность наведения излучения на объект. Момент времени t4 в соответствии с (6) равен
t4 = tо1 + 2H/C + 2R(t3)/C (15).
На основании известных параметров to1, t4, H из (15) определяют R(t3) - дальность до объекта в момент t3 прихода на объект импульса излучения. Данную величину R(t3) используют для определения точности прогнозирования траектории объекта и для дальнейшего определения параметров движения объекта.
Измеренные координаты  реального положения объекта в момент прихода на объект излучения используют для определения вектора разности координат
реального положения объекта в момент прихода на объект излучения используют для определения вектора разности координат  Вектор разности координат и реальные координаты объекта определяют на основе следующего соотношения:
Вектор разности координат и реальные координаты объекта определяют на основе следующего соотношения:
Здесь  - координаты зондирующего светового пучка, отраженного от объекта, измеренные непосредственно первым фотоприемным блоком 9;
- координаты зондирующего светового пучка, отраженного от объекта, измеренные непосредственно первым фотоприемным блоком 9; - реальные координаты объекта в момент прихода излучения на объект;
- реальные координаты объекта в момент прихода излучения на объект; - вектор управления (13), определяющий изменение направления светового пучка, осуществляемое первым блоком наведения 4;
- вектор управления (13), определяющий изменение направления светового пучка, осуществляемое первым блоком наведения 4; - ранее определенные параметры координат ожидаемой точки (
- ранее определенные параметры координат ожидаемой точки ( ) и оси источника рабочего излучения
) и оси источника рабочего излучения  (8).
(8).
На основе (16) в блоке обработки информации 6 определяют вектор разности  как разность
как разность .
.
Координаты полученного вектора разности  (17) принимают за координаты (параметры) вектора
(17) принимают за координаты (параметры) вектора  ошибки наведения излучения на объект:
ошибки наведения излучения на объект: .
.
В предлагаемом способе определение вектора ошибки  возможно как в результате однократного измерения, так и в результате осуществления серии измерений реализаций вектора ошибки
возможно как в результате однократного измерения, так и в результате осуществления серии измерений реализаций вектора ошибки  с последующим усреднением его параметров по ансамблю и определения среднего вектора ошибки наведения
с последующим усреднением его параметров по ансамблю и определения среднего вектора ошибки наведения  В последнем случае для определения вектора ошибки
В последнем случае для определения вектора ошибки  осуществляют подсвет объекта серией импульсов i=1...M зондирующего излучения от генератора 54, с общим произвольным числом импульсов М. Для каждого i-го зондирующего импульса подсвета объекта по вышеприведенной технологии определяют вектор
осуществляют подсвет объекта серией импульсов i=1...M зондирующего излучения от генератора 54, с общим произвольным числом импульсов М. Для каждого i-го зондирующего импульса подсвета объекта по вышеприведенной технологии определяют вектор  разности в соответствии с (16), (17).
разности в соответствии с (16), (17).
Осуществляют определение параметров среднего вектора разности  для полученной серии произведенных измерений вектора разности
для полученной серии произведенных измерений вектора разности  в соответствии с соотношениями
в соответствии с соотношениями
 .
.
Параметры полученного усредненного вектора разности принимают за параметры вектора ошибок  наведения излучения на объект
наведения излучения на объект .
.
М - общее число зондирующих импульсов излучения.
Далее осуществляют компенсацию измеренной ошибки наведения путем наведения выходной оси первого блока наведения 4 во вторую уточненную точку ожидаемого нахождения объекта с координатами  равными сумме координат
равными сумме координат
В результате этой операции исключают измеренную величину ошибки наведения, характеризуемую вектором ошибки  и направляют выходную ось первого блока наведения 4 в точку пространства с координатами
и направляют выходную ось первого блока наведения 4 в точку пространства с координатами
Таким образом, выходная ось первого блока наведения 4 установлена в точку реального нахождения объекта  в момент прихода излучения на объект с учетом ранее полученных координат оси источника рабочего излучения
в момент прихода излучения на объект с учетом ранее полученных координат оси источника рабочего излучения  в системе координат первой заданной точки A1.
в системе координат первой заданной точки A1.
Собственно наведение оси первого блока наведения 4 во вторую уточненную точку  осуществляют путем подачи соответствующих управляющих сигналов, пропорциональных величине вектора
осуществляют путем подачи соответствующих управляющих сигналов, пропорциональных величине вектора  (22) с выхода блока обработки информации 6 на блоки вращения 20, 21 первого блока наведения 4.
(22) с выхода блока обработки информации 6 на блоки вращения 20, 21 первого блока наведения 4.
Далее, согласно предлагаемому способу, осуществляют подготовку к формированию вспомогательного излучения и рабочего излучения. Осуществляют смещение направления оси источника вспомогательного излучения относительно первой заданной точки A1 в плоскости, перпендикулярной этой оси, на величину, пропорциональную расстоянию от платформы ЛА до источника рабочего излучения и скорости платформы ЛА относительно источника рабочего излучения Vп. Указанное смещение оси источника вспомогательного излучения - лазерного генератора 7 - осуществляют с помощью дефлектора 8, управляемого по сигналам от блока обработки информации 6. Данное смещение оси необходимо для компенсации перемещения в пространстве точки А2 - центра отражательного зеркала 22, третьего блока наведения излучения 5, возникающего вследствие движения платформы ЛА 1 относительно находящегося на земле источника рабочего излучения 26. На фиг.3 схематично показан ход светового луча от источника вспомогательного излучения 7, смещенного относительно точки А1 в плоскости, перпендикулярной оси, на величину h посредством дефлектора 8. Позициями b1 и b2 обозначены два последовательных положения отражательного зеркала 22, обусловленные движением платформы ЛА со скоростью Vп, параллельно оси A1 -  по указанной на чертеже фиг.3 стрелке
по указанной на чертеже фиг.3 стрелке  Соответственно,
Соответственно,  - последовательные положения центра отражательного зеркала 22; е - положение точки отражения светового луча от лазерного генератора 7, отклоненного на величину h и распространяющегося по направлению к источнику рабочего излучения. Отклоненный световой луч находится в пределах отверстия в центре зеркал 13 и 10. В обратном ходе световой луч от лазерного генератора 7, представляющий рабочее излучение от источника рабочего излучения 26, 29, будет отражен от зеркала 22 в точке
- последовательные положения центра отражательного зеркала 22; е - положение точки отражения светового луча от лазерного генератора 7, отклоненного на величину h и распространяющегося по направлению к источнику рабочего излучения. Отклоненный световой луч находится в пределах отверстия в центре зеркал 13 и 10. В обратном ходе световой луч от лазерного генератора 7, представляющий рабочее излучение от источника рабочего излучения 26, 29, будет отражен от зеркала 22 в точке  , смещенной относительно точки
, смещенной относительно точки  на величину
на величину
здесь Vп - составляющая скорости ЛА вдоль оси A1-А2,  - промежуток времени двойного распространения излучения до источника рабочего излучения, определяемой расстоянием Н. Из фиг.3 величина h равна
- промежуток времени двойного распространения излучения до источника рабочего излучения, определяемой расстоянием Н. Из фиг.3 величина h равна .
.
Здесь величины Vп и H известны из параметров движения платформы ЛА, которые поступают от системы внешнего целеуказания 43. Угол α - угол между нормалью  к плоскости зеркала 22 и осью А1-А2. Параметры угла α определяют по показаниям датчиков угла, входящим в состав третьего блока наведения 5. Величину смещения луча h в плоскости падения светового пучка е1e на отражательное зеркало 22, которая совпадает с плоскостью чертежа на фиг.3, определяют согласно (23) по величине составляющей скорости Vп платформы параллельной оси А1-А2, которая совпадает с продольной осью платформы ЛА 1 - (самолета). Если согласно данным целеуказания платформа ЛА 1 имеет составляющую скорости V1 п, перпендикулярную показанной на фиг.3 плоскости падения светового луча на отражательное зеркало 22, то осуществляют смещение оси источника вспомогательного излучения посредством дефлектора 8 на величину h2, перпендикулярную показанной на фиг.3 плоскости падения, т.е. перпендикулярно плоскости чертежа фиг.3, но также в плоскости, перпендикулярной оси A1-А2. Данная величина h2 не зависит от угла α и определяется только составляющей скорости V1 n, перпендикулярной оси А1-А2 и равна:
к плоскости зеркала 22 и осью А1-А2. Параметры угла α определяют по показаниям датчиков угла, входящим в состав третьего блока наведения 5. Величину смещения луча h в плоскости падения светового пучка е1e на отражательное зеркало 22, которая совпадает с плоскостью чертежа на фиг.3, определяют согласно (23) по величине составляющей скорости Vп платформы параллельной оси А1-А2, которая совпадает с продольной осью платформы ЛА 1 - (самолета). Если согласно данным целеуказания платформа ЛА 1 имеет составляющую скорости V1 п, перпендикулярную показанной на фиг.3 плоскости падения светового луча на отражательное зеркало 22, то осуществляют смещение оси источника вспомогательного излучения посредством дефлектора 8 на величину h2, перпендикулярную показанной на фиг.3 плоскости падения, т.е. перпендикулярно плоскости чертежа фиг.3, но также в плоскости, перпендикулярной оси A1-А2. Данная величина h2 не зависит от угла α и определяется только составляющей скорости V1 n, перпендикулярной оси А1-А2 и равна:
В результате смещения оси источника вспомогательного излучения - лазерного генератора 7 - в направлениях h и h2 в соответствии с соотношениями (23), (24) обеспечивают такое направление оси рабочего излучения при его распространении от источника рабочего излучения 26 до платформы ЛА, при котором указанная ось рабочего излучения проходит через центр А2 отражательного зеркала 22, что обеспечивает дальнейшее распространение рабочего излучения по направлению неподвижной оси А1-А3 на вход первого блока наведения 4. При движении платформы ЛА со скоростью Vп не более 300 м/сек и дальностях Н<10-20 км размер центрального отверстия в зеркалах 10, 13 составляет 1-2 см.
В качестве дефлектора 8 может быть использована плоскопараллельная пластина толщиной d, расположенная в двойном кардановом подвесе, управляемом шаговыми двигателями от блока управления 62.
При падении светового луча на плоскопараллельную пластинку под углом ε1 смещение луча в поперечном направлении h равно ,
,
где ε2 - угол преломления луча в пластине.
При повороте плоскопараллельной пластины вокруг оси, лежащей в ее плоскости и перпендикулярной оси А1-А2, происходит изменение угла падения ε1 и изменение величины смещения луча h.
Возможно также применение в качестве дефлектора 8 устройства дискретного отклонения светового пучка на основе электрооптических кристаллов,
После установления компенсирующего скорость платформы ЛА положения оси источника вспомогательного излучения осуществляют рабочий запуск лазерного генератора вспомогательного излучения 7, то есть осуществляют собственно формирование вспомогательного излучения, на основе которого далее формируют посредством ОВФ рабочее излучение.
Вплоть до момента запуска лазерного генератора вспомогательного излучения 7 первый, второй и третий блоки наведения 4, 5, 31 осуществляют и продолжают указанный и рассмотренный выше режим слежения, при котором выходная (визирная) ось первого блока наведения 4 направлена во вторую уточненную точку предполагаемого нахождения объекта, а действия второго и третьего блоков наведения 31, 5 обеспечивают динамическое пространственное совмещение направлений осей источника рабочего излучения В2-В1-В3 и неподвижной относительно ЛА 1 главной оси А3-A1-A10-A7-A8, проходящей через первую заданную точку А1, определяющей систему координат, связанную с точкой A1, и совпадающей с исходной осью лазерного генератора вспомогательного излучения 7. При выполнении режимов слежения и определения координат объекта и координат векторов направленности осей источников излучений первый фотоприемный блок 9 работает в режиме приема указанных сигналов раздельно во времени (режим разделения времени). Управление данным режимом осуществляют с помощью блока обработки информации 6, в состав которого входит таймер, синхронизированный с сигналами точного единого времени, поступающими от блока 43 внешнего целеуказания. При этом луч света, сформированный первым задающим генератором 40 и распространяющийся по направлению В1-В3, соответствующему оси В3-В1-В2, проходит далее в своем распространении по направлению A2-A1-A10 и далее с учетом отражения в зеркалах 13, 15 и 10 - в обратном ходе - луч проходит по направлению А10-А11-А10-А1-А5, А6 и поступает в центр площадок многоэлементных фотоприемников 46, 47. То есть оси лазерного генератора вспомогательного излучения 7, главная ось А1-А2, оси первого фотоприемного блока А6-А1 и А5-А1 и ось источника рабочего излучения В3-В1-В2 являются взаимно совмещенными, продолжающими друг друга в пространстве. Возможное динамическое отклонение оси источника рабочего излучения, задаваемое направлением В4-А2 от главной оси А1-А2 (с учетом отражения в отражательном зеркале 22), компенсируют на этапе последней операции по формированию и наведению рабочего излучения.
Формирование рабочего излучения осуществляют далее следующим образом. Вначале определяют момент времени рабочего запуска лазерного генератора вспомогательного излучения 7 to1p. Момент времени to1p выбирают и определяют на основе тех же соотношений (5), (6), которые были изложены и рассмотрены ранее при определении первого момента импульса to1 формирования вспомогательного излучения, в котором было осуществлено формирование импульса зондирующего излучения от второго задающего генератора 54, благодаря которому был осуществлен контроль точности наведения. Поэтому момент времени to1p выбирают следующим, за ранее выбранным и определенным моментом времени to1, т. е. выполняется условие to1p>to1>to. Для этого моменты времени определяют величину расстояния H(to1p), величину направления  в соответствии с ранее изложенными операциями, то есть осуществляют слежение за точкой ожидаемого нахождения объекта
в соответствии с ранее изложенными операциями, то есть осуществляют слежение за точкой ожидаемого нахождения объекта  определенной на основании решения уравнений (5) и соотношения (6), но с новыми более поздними параметрами момента формирования импульса вспомогательного излучения to1p>to1. При этом сохраняют и используют ранее полученные компенсационные добавления к устанавливаемому направлению выходной (визирной) оси первого блока наведения 4. При этом осуществляют наведение выходной оси первого блока наведения 4 во вторую уточненную точку
определенной на основании решения уравнений (5) и соотношения (6), но с новыми более поздними параметрами момента формирования импульса вспомогательного излучения to1p>to1. При этом сохраняют и используют ранее полученные компенсационные добавления к устанавливаемому направлению выходной (визирной) оси первого блока наведения 4. При этом осуществляют наведение выходной оси первого блока наведения 4 во вторую уточненную точку  ожидаемого нахождения объекта в соответствии с (22), но с параметрами
ожидаемого нахождения объекта в соответствии с (22), но с параметрами  рассчитанными и установленными для более позднего момента времени to1p.
рассчитанными и установленными для более позднего момента времени to1p.
После определения момента времени to1p запуска лазерного генератора вспомогательного излучения 7 осуществляют передачу этой информации от блока обработки информации 6 через блоки связи 25, 42 во второй блок обработки информации 30, с помощью которого обеспечивают запуск источника рабочего излучения 26 (лазерного усилителя) от блока накачки 27 синхронно с приходом на этот источник 26 импульса вспомогательного излучения от лазерного генератора 7 в момент времени t5 = to1p + H( to1p)/C.
Управляющий сигнал от блока обработки информации 30 поступает в блок накачки 27 в момент времени t5.
Для запуска лазерного генератора вспомогательного излучения 7 в момент времени to1p от блока обработки информации 6, управляющего процессом запуска, на блок накачки 50 источника излучения 49 поступает управляющий сигнал для осуществления накачки источника излучения 49. Одновременно с этим на блок управления 59 блоком оптических затворов 52 от блока обработки информации 6 поступает управляющий сигнал для открытия одного из затворов 52. Положение открытого элемента затвора 52 определяет направление в пространстве относительно исходной оси А7-А10 вектора направления диаграммы направленности (оси) сформированного импульса вспомогательного излучения. При открывании центрального затвора в блоке оптических затворов 52 сформированное вспомогательное излучение распространяется строго вдоль оси А7-А10-A1. При открывании одного из затворов 52, расположенных на расстоянии Δx3, Δy3 от центральной точки A8 (т.е. от оси A7-А10), сформированное вспомогательное излучение будет распространяться под углом к оси А7-А10, определяемым вектором  с угловыми координатами
с угловыми координатами
где fc - фокусное расстояние Фурье-линзы 51.
В момент времени, непосредственно предшествующий запуску лазерного генератора 7, осуществляют определение координат  вектора направления оси источника рабочего излучения 26 в системе координат, связанной с первой заданной точкой A1 в соответствии с соотношением (8) с помощью первого фотоприемного блока 9 в соответствии с тем, как это было осуществлено ранее при определении координат вектор
вектора направления оси источника рабочего излучения 26 в системе координат, связанной с первой заданной точкой A1 в соответствии с соотношением (8) с помощью первого фотоприемного блока 9 в соответствии с тем, как это было осуществлено ранее при определении координат вектор  .
.
На основе полученных значений координат вектора
осуществляют выбор координат (Δx3, Δy3) положения открытого затвора в блоке затворов 52 в соответствии со следующим соотношением:
Отсюда
Этим выбором открываемого затвора 52 осуществляют направление вектора оси формируемого вспомогательного излучения точно по направлению вектора оси источника рабочего излучения и компенсируют возможный небольшой сдвиг (уход) направления оси источника рабочего излучения в момент времени, непосредственно предшествующий моменту времени формирования импульса вспомогательного излучения.
Далее согласно предлагаемому способу в момент времени, совпадающий с моментом времени to1p формирования импульса вспомогательного излучения (или непосредственно предшествующий этому моменту времени), определяют координаты вектора направления оси источника рабочего излучения  в системе координат, связанной с первой заданной точкой А1, определяют величину координат второго вектора разности
в системе координат, связанной с первой заданной точкой А1, определяют величину координат второго вектора разности  между ранее определенным вектором направления оси источника рабочего излучения
между ранее определенным вектором направления оси источника рабочего излучения  (8) в момент времени t1 и вектором направления оси источника рабочего излучения
(8) в момент времени t1 и вектором направления оси источника рабочего излучения  координаты которого определены в момент времени to1p формирования вспомогательного излучения:
координаты которого определены в момент времени to1p формирования вспомогательного излучения:
На основании координат полученного второго вектора разности  (30) определяют и формируют компенсирующий угловой сдвиг, пропорциональный величинам пространственных координат второго вектора разности
(30) определяют и формируют компенсирующий угловой сдвиг, пропорциональный величинам пространственных координат второго вектора разности  (30), для внесения в параметры вектора направления оси сформированного рабочего излучения.
(30), для внесения в параметры вектора направления оси сформированного рабочего излучения.
Координаты вектора  направления оси источника рабочего излучения определяют в соответствии с соотношением (8) с помощью первого фотоприемного блока 9, аналогично тому, как это было изложено выше - по величине смещения светового пятна относительно центров многоэлементных фотоприемников 46, 47 при приеме излучения, сформированного первым задающим генератором 40, задающим направление оси В2-В1-В3 источника рабочего излучения. Прием излучения от первого задающего генератора 40 и определение координат
направления оси источника рабочего излучения определяют в соответствии с соотношением (8) с помощью первого фотоприемного блока 9, аналогично тому, как это было изложено выше - по величине смещения светового пятна относительно центров многоэлементных фотоприемников 46, 47 при приеме излучения, сформированного первым задающим генератором 40, задающим направление оси В2-В1-В3 источника рабочего излучения. Прием излучения от первого задающего генератора 40 и определение координат  смещения светового пятна относительно точек центров A5, А6 в первом фотоприемном блоке 9 осуществляют в момент времени to1p или в непосредственно предшествующий этому момент времени. Информация о параметрах вектора
смещения светового пятна относительно точек центров A5, А6 в первом фотоприемном блоке 9 осуществляют в момент времени to1p или в непосредственно предшествующий этому момент времени. Информация о параметрах вектора  поступает с выходов первого фотоприемного блока 9 в блок обработки информации 6, в котором по ранее измеренным параметрам вектора
поступает с выходов первого фотоприемного блока 9 в блок обработки информации 6, в котором по ранее измеренным параметрам вектора  определяют параметры второго вектора разности
определяют параметры второго вектора разности  (30). На основании полученных параметров второго вектора разности
(30). На основании полученных параметров второго вектора разности  в блоке обработки информации 6 определяют компенсирующий угловой сдвиг
в блоке обработки информации 6 определяют компенсирующий угловой сдвиг  (31), противоположный по величине параметрам вектора разности
(31), противоположный по величине параметрам вектора разности  , и формируют соответствующие управляющие сигналы, поступающие на блок управления 17 блока угловой компенсации 16. Последний под воздействием управляющих сигналов с блока управления изменяет свои параметры в соответствии с величиной компенсирующего углового сдвига
, и формируют соответствующие управляющие сигналы, поступающие на блок управления 17 блока угловой компенсации 16. Последний под воздействием управляющих сигналов с блока управления изменяет свои параметры в соответствии с величиной компенсирующего углового сдвига  для внесения компенсационных добавлений (смещений) в параметры вектора направления оси рабочего излучения. При использовании второго варианта выполнения блока угловой компенсации поз. 63, 64 на фиг.2 управляющие сигналы, пропорциональные величине
для внесения компенсационных добавлений (смещений) в параметры вектора направления оси рабочего излучения. При использовании второго варианта выполнения блока угловой компенсации поз. 63, 64 на фиг.2 управляющие сигналы, пропорциональные величине  (31), поступают с выхода блока обработки информации 6 на блок управления 64, выходы которого подсоединены к пьезоэлементам 63 (79) (см. фиг.5а). Описание работы данного варианта блока угловой компенсации приведено ниже.
(31), поступают с выхода блока обработки информации 6 на блок управления 64, выходы которого подсоединены к пьезоэлементам 63 (79) (см. фиг.5а). Описание работы данного варианта блока угловой компенсации приведено ниже.
Сформированный лазерным генератором 7 в момент времени to1p импульс вспомогательного излучения распространяется от платформы ЛА 1 по направлению А10-A1-А2-В5-В4-В3-В1-В2. При прохождении импульса вспомогательного излучения через кювету 26 источника рабочего излучения происходит усиление излучения с большой величиной коэффициента усиления, определяемого параметрами этого источника излучения. В блоке ОВФ 29 формируется излучение с обращенным волновым фронтом, которое имеет направление вектора распространения, противоположное направлению вектора оси вспомогательного излучения, и соответствует направлению оси В1-В3-В4-А2-А1, измеренное в момент to1p формирования импульса вспомогательного излучения. В обратном ходе излучение с обращенным волновым фронтом распространяется от точки В2 по направлению B1-B3-B4-A2-A1-A3-A4 и далее в направлении ожидаемой точки нахождения объекта. В обратном ходе через кювету 26 источника рабочего излучения происходит усиление излучения с ОВФ, в результате чего на выходе кюветы источника рабочего излучения 26 формируют рабочее излучение высокой мощности. Данное излучение благодаря наличию обращенного волнового фронта обеспечивает автоматическую компенсацию искажений, связанных с неоднородностями турбулентной атмосферы по трассе распространения излучения до ЛА 1, а также неоднородностями активной среды источника рабочего излучения 26. Вследствие этого на отражательное зеркало 22 возвращается рабочее излучение с квазиплоским волновым фронтом, малой расходимостью и высокой плотностью излучения, причем центр диаграммы направленности данного рабочего излучения приходится точно на центральную точку А2 (точка А2 2 на фиг.3), из которой фактически был излучен импульс вспомогательного излучения в момент времени to1p. Рабочее излучение, сформированное на основе ОВФ, в обратном ходе от источника рабочего излучения до отражательного зеркала 22 - третьего блока наведения - после прохождения через атмосферный канал распространения 80 и автоматической компенсации атмосферных искажений физически эквивалентно неискаженному световому пучку с апертурой, соответствующей выходной апертуре источника рабочего излучения, в данном случае равной апертуре выходного поворотного зеркала во втором блоке наведения 30, имеющего входной видимый диаметр в плоскости, перпендикулярной выходной оси, равный Dp. Размер светового пучка рабочего излучения, приходящего на отражательное зеркало 22, обусловлен только дифракцией на выходной апертуре источника рабочего излучения 26 и пропорционален величине  где Н - расстояние от источника рабочего излучения до отражательного зеркала 22 - до платформы ЛА. При соответствующем выборе диаметра апертуры Dp источника рабочего излучения и диаметра отражательного зеркала 22 d3 для всех возможных значений расстояния Н выполняется условие
где Н - расстояние от источника рабочего излучения до отражательного зеркала 22 - до платформы ЛА. При соответствующем выборе диаметра апертуры Dp источника рабочего излучения и диаметра отражательного зеркала 22 d3 для всех возможных значений расстояния Н выполняется условие
при котором весь сформированный в результате ОВФ пучок рабочего излучения поступает в обратном ходе на отражательное зеркало 22 третьего блока наведения 5. При этом, как показано, ось диаграммы направленности пучка рабочего излучения приходится на центр отражательного зеркала 22 - точку А2. Сформированное рабочее излучение проходит в своем дальнейшем распространении от отражательного зеркала 22 (точка А2) до входа в первый блок наведения (точка А3) через блок угловой компенсации 16, посредством которого осуществляют введение углового компенсирующего сдвига в направлении вектора направленности рабочего излучения в соответствии с ранее определенными параметрами компенсирующего углового сдвига  Далее сформированное рабочее излучение посредством первого блока наведения 4 направляют на объект в направлении ранее определенной второй уточненной точки
Далее сформированное рабочее излучение посредством первого блока наведения 4 направляют на объект в направлении ранее определенной второй уточненной точки  ожидаемого нахождения объекта в момент доставки рабочего излучения на объект с учетом внесенных поправок в направление выходной оси первого блока наведения 4. На этом цикл доставки рабочего излучения на объект завершен.
ожидаемого нахождения объекта в момент доставки рабочего излучения на объект с учетом внесенных поправок в направление выходной оси первого блока наведения 4. На этом цикл доставки рабочего излучения на объект завершен.
Согласно предлагаемому способу возможен второй вариант осуществления компенсации отклонения оси источника рабочего излучения от направления главной оси А2-A1 и, соответственно, от направления входной оси А1-А3 первого блока наведения 4. Данный второй вариант отражен в пункте 6 формулы изобретения и заключается в том, что после определения в момент времени t1 пространственных координат  вектора направленности оси источника рабочего излучения относительно первой заданной точки пространства А1 осуществляют наведение оси источника рабочего излучения в первую заданную точку пространства А1 посредством третьего блока наведения 5. Наведение оси источника рабочего излучения в первую заданную точку А1 осуществляют путем введения компенсирующего углового сдвига посредством третьего блока наведения 5 в направлении оси источника рабочего излучения при отражении рабочего излучения от отражательного зеркала 22. Данный вводимый компенсирующий угловой сдвиг пропорционален по величине и противоположен по знаку (направлению) измеренным координатам вектора
вектора направленности оси источника рабочего излучения относительно первой заданной точки пространства А1 осуществляют наведение оси источника рабочего излучения в первую заданную точку пространства А1 посредством третьего блока наведения 5. Наведение оси источника рабочего излучения в первую заданную точку А1 осуществляют путем введения компенсирующего углового сдвига посредством третьего блока наведения 5 в направлении оси источника рабочего излучения при отражении рабочего излучения от отражательного зеркала 22. Данный вводимый компенсирующий угловой сдвиг пропорционален по величине и противоположен по знаку (направлению) измеренным координатам вектора  направленности оси источника рабочего излучения в системе координат относительно точки А1. Для выполнения этой операции с выхода первого фотоприемного блока 9 сигналы Δxp, Δyp (8), определяющие параметры вектора
направленности оси источника рабочего излучения в системе координат относительно точки А1. Для выполнения этой операции с выхода первого фотоприемного блока 9 сигналы Δxp, Δyp (8), определяющие параметры вектора  через первый блок обработки информации 6 поступают с обратным знаком в блок управления 24 третьего блока наведения 5. Положение отражательного зеркала 22 под воздействием этих управляющих сигналов устанавливают такое, что направление вектора оси источника рабочего излучения
через первый блок обработки информации 6 поступают с обратным знаком в блок управления 24 третьего блока наведения 5. Положение отражательного зеркала 22 под воздействием этих управляющих сигналов устанавливают такое, что направление вектора оси источника рабочего излучения  после отражения от зеркала 22 становится параллельным главной оси А3-A1, то есть в системе координат, связанной с первой заданной точкой А1, измеряемый вектор направления
после отражения от зеркала 22 становится параллельным главной оси А3-A1, то есть в системе координат, связанной с первой заданной точкой А1, измеряемый вектор направления  становится нуль-вектором
становится нуль-вектором
В этом варианте реализации способа не производят определения координат первого вектора разности  и наведения выходной оси первого блока наведения в первую уточненную точку ожидаемого нахождения объекта с координатами
и наведения выходной оси первого блока наведения в первую уточненную точку ожидаемого нахождения объекта с координатами  Последующие операции способа осуществляют так же, как изложено выше, причем при определении параметров векторов и координат полагают величину
Последующие операции способа осуществляют так же, как изложено выше, причем при определении параметров векторов и координат полагают величину  т.е. координаты первой уточненной точки считают равными координатам
т.е. координаты первой уточненной точки считают равными координатам  точки ожидаемого нахождения объекта. В момент формирования импульса зондирующего излучения определяют координаты
точки ожидаемого нахождения объекта. В момент формирования импульса зондирующего излучения определяют координаты  вектора направленности оси источника рабочего излучения 26, на основании которых определяют координаты второго вектора разности
вектора направленности оси источника рабочего излучения 26, на основании которых определяют координаты второго вектора разности  на основании соотношения
на основании соотношения .
.
Таким образом, вектор  является вектором разности между нуль-вектором и вектором направления
является вектором разности между нуль-вектором и вектором направления  оси источника рабочего излучения, который определен в момент формирования вспомогательного излучения. Нуль-вектор в (31) обусловлен тем, что ось источника рабочего излучения наведена посредством третьего блока наведения 5 в первую заданную точку А1, а вектор
оси источника рабочего излучения, который определен в момент формирования вспомогательного излучения. Нуль-вектор в (31) обусловлен тем, что ось источника рабочего излучения наведена посредством третьего блока наведения 5 в первую заданную точку А1, а вектор  определяет мгновенное отклонение указанной оси от главной оси A1-А2 (и соответственно оси A1-А3).
определяет мгновенное отклонение указанной оси от главной оси A1-А2 (и соответственно оси A1-А3).
Для осуществления указанного наведения оси источника рабочего излучения в первую заданную точку A1 образуют контур наведения (управления), в который входят следующие элементы: первый задающий генератор 40, третий блок наведения 5, первый фотоприемный блок 9, первый блок обработки информации 6, блок управления 24.
Данный второй вариант реализации компенсации отклонения оси источника рабочего излучения 26 является физически эквивалентным вышеизложенному первому варианту, но может иметь преимущества при решении конкретных технических задач.
На этом цикл доставки рабочего излучения на объект завершен.
Далее рассмотрим особенности работы отдельных элементов устройства, реализующего способ.
В устройстве, реализующем способ, разделение рабочего излучения, идущего от источника рабочего излучения 26 (фиг. 2) и излучения, отраженного от объекта и содержащего информацию о координатах объекта, осуществляют с помощью светоделительного зеркала 10, которое для выполнения этой функции снабжено поляризационным покрытием со стороны прихода на это зеркало излучений, т.е. со стороны точек А2 и А3. С обратной стороны зеркала 10 покрытие отсутствует и световой поток, идущий со стороны точки А10, отражается от обратной стороны зеркала на вход первого фотоприемного блока 9. Рабочее излучение имеет вектор поляризации, например, лежащий в плоскости светоделительного зеркала 10 и отражается от поляризационного покрытия на вход первого блока наведения - по направлению А1-А3. Данная поляризация рабочего излучения задается поляризацией вспомогательного излучения, формируемого источником излучения 49, входящим в состав лазерного генератора вспомогательного излучения 7. При формировании рабочего излучения на основе ОВФ в блоке 29 исходная поляризация сохраняется. Собственно вспомогательное излучение от лазерного генератора 7 имеет небольшое поперечное сечение пучка и проходит через отверстия в центре зеркал 13, 10, которые имеют диаметр менее 0,1 от диаметра этих зеркал. Остальные зеркала, через которые проходит рабочее или отраженное от объекта излучение, являются полностью отражательными зеркалами (поз. 13, 22, 19, 20, 15). Излучение для подсвета объекта, формируемое лазером подсвета цели 11, имеет направление вектора поляризации, перпендикулярное вектору поляризации рабочего излучения - при рассмотрении в плоскости светоделительного зеркала 10. При этом направлении вектора поляризации излучение от объекта проходит через светоделительное зеркало 10 на вход первого фотоприемного блока 9 по направлению А3-А1-А5. Зондирующее излучение, формируемое первым задающим генератором 40, имеет направление вектора поляризации, перпендикулярное вектору поляризации рабочего излучения, вследствие чего при распространении от точки А2 оно проходит через светоделительное зеркало 10 по направлению А2-А1-А10 и далее, как рассмотрено выше в описании.
Второй задающий генератор 54 формирует лазерное излучение с круговой поляризацией. Такое излучение, принимаемое на платформе ЛА 1 после отражения от уголкового отражателя 66, частично проходит через светоделительное зеркало 10 по направлению А2-A1-А10 и поступает на вход первого фотоприемного блока 9, частично отражается от светоделительного зеркала 10 по направлению A2-A1-A3. Последнее обеспечивает возможность подсвета объекта излучением второго задающего генератора 54 и выполнение операций контроля точности наведения, как это изложено выше. Для пропускания отраженного от объекта излучения, подсвеченного излучением задающего генератора 54 через светоделительное зеркало 10 на вход первого фотоприемного блока 9, служит плоскопараллельная пластина 67, обеспечивающая преобразование линейной поляризации пучка в круговую поляризацию. Данная пластина 67 имеет эквивалентную толщину, равную λ/4, где λ - длина волны излучения. Аналогичная пластина входит в состав второго задающего генератора 54 и обеспечивает формирование этим генератором излучения с круговой поляризацией.
Следует отметить, что для подсвета объекта при выполнении операций контроля точности наведения может быть использован лазер подсвета цели 11. В этом случае запуск лазера подсвета цели 11 и формирование импульса задающего излучения этим лазером осуществляют в момент времени t2 (6), соответствующий приходу импульса рабочего излучения с обращенным волновым фронтом на платформу ЛА 1 (на отражательное зеркало 22). При этом момент времени t2 определяют на основании решения уравнений (5) и соотношения (6). Остальные операции выполняются в неизменном виде, описанном выше.
Все лазерные генераторы, входящие в устройство, реализующее способ (поз. 26, 40, 49, 54, 11), работают на одной длине волны λраб в ближнем ИК - диапазоне, например, лазерные генераторы фотодиссоционного типа, с различным уровнем мощности. Наиболее мощным является источник рабочего излучения 26 на основе мощного фотодиссоционного двухпроходного усилителя. Блок обращения волнового фронта 29 (ОВФ) выполнен в виде кюветы с прозрачными окнами, заполненной смесью газов (SF6+Хе), находящихся под давлением. Возможно использование других веществ в газовой фазе, например сероуглерода. Формирование излучения с обращенным волновым фронтом осуществляют в соответствии с эффектом ОВФ [8], реализуемым в результате концентрации излучения высокой мощности в фокусе первой фокусирующей линзы 28 - точка В2. Излучение с обращенным волновым фронтом распространяется в обратном ходе строго по направлению В2-В1-В3.
Для разделения рабочего излучения на длине волны λраб фотодиссоционного лазера и лазерных излучений для информационных каналов, используемых для определения координат объекта и координат векторов направленности осей, можно использовать светоделительное зеркало с дихроичным двухволновым покрытием. В этом случае лазерные генераторы подсвета цели и для провешивания осей (поз. 11, 54, 40) работают на длине волны λ2 = λраб+Δλ, незначительно отличающейся от рабочей длины волны λраб, на которой работает источник излучения 49 и источник рабочего излучения λраб. Фотоприемники, входящие в состав устройства, имеют широкополосную характеристику чувствительности и регистрируют излучение на обеих длинах волн.
Для защиты фотоприемников 46, 47 от действия рабочего излучения или действия лазерного генератора вспомогательного излучения 7 предусмотрено стробирование по времени работы фотоприемников 46, 47 или перекрывание входа первого фотоприемного блока 9 специальным оптическим затвором. Данные средства входят в состав фотоприемного блока 9 и на фиг.2 не показаны.
Рассмотрим более подробно работу лазерного генератора вспомогательного излучения 7, блок-схема которого представлена на фиг.2. Данный лазерный генератор содержит источник излучения 49 с блоком накачки 50 и селектор мод лазерного излучения, состоящий из элементов поз. 53, 52, 51. Источник излучения 49 содержит кювету с активным веществом и первый элемент резонатора, например ретрозеркало с набором уголковых отражателей (на фиг.2 в блоке 7 не показаны). Второй элемент резонатора образует матрица уголковых отражателей 53, причем перед каждым уголковым отражателем 53 расположен соответствующий управляемый оптический затвор в блоке оптических затворов 52, управляемых от блока управления 59. Источник излучения 49 при воздействии накачки работает в режиме генерации множества угловых мод. Селектор мод, образованный элементами 53, 52, 51 осуществляет выделение и генерацию одной угловой моды, вектор направленности которой  определяется координатами Δx3, Δy3 затвора в плоскости блока затворов 52, совмещенной с фокальной плоскостью Фурье-линзы 51, как было отмечено выше. В качестве блоков оптических затворов 52 может быть использована многоканальная матрица для внутрирезонаторной оперативной селекции направлений излучения, описание которой опубликовано в [5].
определяется координатами Δx3, Δy3 затвора в плоскости блока затворов 52, совмещенной с фокальной плоскостью Фурье-линзы 51, как было отмечено выше. В качестве блоков оптических затворов 52 может быть использована многоканальная матрица для внутрирезонаторной оперативной селекции направлений излучения, описание которой опубликовано в [5].
Конструктивно многоканальная матрица представляет собой две последовательно соединенные треугольные призмы, к отражающим граням которых пристыкованы пьезомодулирующие пластины, образующие систему строк и столбцов в проходящем излучении. Действие многоканальной матрицы основано на нарушении режима полного внутреннего отражения излучения от границы раздела, к которой осуществляют прижим модулирующих пластин с помощью пьезоэлементов, управляемых импульсами напряжения от блока управления 59. Относительный оптический контраст между открытой и закрытой ячейками (затворами) в 52 составляет более 1000:1. Контроль положения оси источника вспомогательного излучения 7 осуществляют с помощью излучения второго задающего генератора 54 и элементов поз. 57, 58, 60, 61. Как было отмечено выше, излучение задающего генератора 54 распространяется по направлению - диафрагма 55, точки A7-A10-A1-A2 и далее до второго фотоприемного блока 36 и до уголкового отражателя 66. Данное излучение определяет (материализует) ось вспомогательного излучения, которая в исходном состоянии совпадает с направлением A7-A1-A2, проходящим через первую заданную точку A1. Координаты Δx3, Δy3 открытого элемента блока затворов 52 относительно точки А8 в плоскости, перпендикулярной оси A7-A1-A2, характеризуют, как было отмечено, параметры (угловые) вектора направленности вспомогательного излучения, генерируемого источником излучения 49. Точки А7 и А8 находятся на одной оси А8-А1 на небольшом расстоянии друг от друга, причем точка А8 находится в фокальной плоскости Фурье-линзы 51. Четвертый многоэлементный фотоприемник 58 осуществляет контроль совмещения центра блока затворов 52 - точки А8 с точкой А7, которая является индикатором положения оси излучения, формируемого вторым задающим генератором 54. Четвертый объектив 57 формирует в плоскости фоточувствительной площадки фотоприемника 58 одновременно изображение диафрагмы 55 (точки А7) и изображение плоскости затворов 52 - (точки А8). С обратной стороны матрица уголковых отражателей 53 подсвечена излучением источника подсвета 60. При осуществлении контроля положения точки А8 открывают в блоке затворов 52 только один центральный затвор (точка А8) и с помощью многоэлементного фотоприемника 58 определяют его координаты Δxo, Δyo в системе фоточувствительной площадки фотоприемника 58. В следующий момент времени при выключенном источнике подсвета 60 и включенном задающем генераторе 54 осуществляют измерение координат диафрагмы 55 (точка А7) Δxд, Δyд. Разность этих координат определяет смещение центра блока затворов 52 относительно оси A7-А1. При превышении этой разности некоторого допустимого уровня осуществляют подъюстировку положения блока затворов перпендикулярно оси А7-А1 или учитывают величину этой разности при выборе координат открываемого затвора 52 при установлении заданной величины координат вектора направленности оси вспомогательного излучения. Измерение и контроль координат световых пятен осуществляют с помощью многоэлементного фотоприемника 58 и блока обработки информации 6, в который поступает сигнал от фотоприемника 58, аналогично тому, как осуществляют определение координат с помощью первого фотоприемного блока 9.
Устройство, реализующее способ, содержит три блока наведения поз. 4, 5, 31.
На фиг.4 схематично представлена блок-схема третьего блока наведения 5, который содержит отражательное зеркало 22, размещенное в двойном кардановом подвесе 23. Последний состоит из двух рам 68 и 69, укрепленных одна в другой, оси вращения которых (ϕAZ и ϕM) взаимно перпендикулярны. Двойной кардановый подвес 23 содержит также два электродвигателя 70, 71 (шаговых), которые обеспечивают поворот отражательного зеркала 22 (нормали к зеркалу 22 А3- Z) вокруг указанных двух осей ϕAZ, ϕM. Электродвигатели 70, 71 снабжены также датчиками углов поворота осей карданова подвеса, информация от которых поступает в блок обработки информации 6.
Дефлектор 8 устроен аналогично конструкции, представленной на фиг.4. В случае выполнения дефлектора 8 на основе двойного карданова подвеса (фиг.4) вместо зеркала 22 устанавливают прозрачную для рабочего излучения плоскопараллельную пластину небольшой толщины h1. При повороте пластины вокруг оси ϕM или ϕAZ на величину β1 проходящий через пластину световой луч при входном нормальном распространении по оси А7-А10 на выходе после прохождения через плоскопараллельную пластину смещается на величину h (25) в плоскости, перпендикулярной оси вращения пластины. Таким образом, задавая угол поворота плоскопараллельной пластины в двойном кардановом подвесе по осям ϕAZ и ϕM можно получить необходимое смещение светового луча с заданными параметрами Δhx, Δhy.
На фиг.5 представлен вариант конструктивного выполнения первого и второго блоков наведения 4, 31.
Блок наведения 4 содержит два поворотных зеркала 18, 19, размещенных в первом 72 и втором 73 узлах вращения под углом 45o к осям вращения ϕAZ, ϕM, которые являются взаимно перпендикулярными. На фиг.5 оси вращения - азимутальная ϕAZ и угломестная ϕM - обозначены соответственно векторами  . Первый узел вращения 72 механически связан с основанием 74 блока наведения 4 через первый подшипник вращения 75. Второй 76 и третий 77 подшипники вращения размещены вместе с первым поворотным зеркалом 18 в первом узле вращения 72. Второй узел вращения 73 с укрепленным в нем вторым поворотным зеркалом 19 механически связан с основанием первого узла вращения через второй и третий подшипники вращения 76, 77. Оси вращения подшипников вращения совпадают с осями вращения
. Первый узел вращения 72 механически связан с основанием 74 блока наведения 4 через первый подшипник вращения 75. Второй 76 и третий 77 подшипники вращения размещены вместе с первым поворотным зеркалом 18 в первом узле вращения 72. Второй узел вращения 73 с укрепленным в нем вторым поворотным зеркалом 19 механически связан с основанием первого узла вращения через второй и третий подшипники вращения 76, 77. Оси вращения подшипников вращения совпадают с осями вращения  соответственно, а также совпадают с оптическими осями распространения световых пучков через блок наведения. Блок наведения содержит два блока вращения 20, 21. Каждый блок вращения 20, 21 содержит электродвигатель (шаговый), блок управления электродвигателем, включающий цифровую ячейку связи с блоком обработки информации 6 и датчик угла поворота оси
соответственно, а также совпадают с оптическими осями распространения световых пучков через блок наведения. Блок наведения содержит два блока вращения 20, 21. Каждый блок вращения 20, 21 содержит электродвигатель (шаговый), блок управления электродвигателем, включающий цифровую ячейку связи с блоком обработки информации 6 и датчик угла поворота оси  по соответствующему направлению оси.
по соответствующему направлению оси.
Конструкция блоков наведения 4 и 31 идентична. Второй блок наведения 31 снабжен вторым фотоприемным блоком 36 и уголковым отражателем 66, которые расположены во втором узле вращения 73, как показано на фиг.5, причем оптические оси второго фотоприемного блока 36 и уголкового отражателя параллельны выходной оси блока наведения.
На фиг.5а представлен один из вариантов выполнения блока угловой компенсации. Согласно этому варианту второе поворотное зеркало 19 в первом блоке наведения 4 установлено на металлической пластине 78 с помощью четырех пьезоэлементов 79, являющихся одновременно держателями зеркала 19. Металлическая пластина 78 установлена во втором узле вращения 73 на место второго поворотного зеркала 19.
Пьезоэлементы 79 подсоединены к блоку управления 64, который соединен с блоком обработки информации 6. Под воздействием электрических управляющих сигналов от блока управления 64 пьезоэлементы 78 изменяют свою длину в сторону увеличения или уменьшения на заданное значение. При этом положение плоскости поворотного зеркала 19 изменяется в пространстве на небольшую угловую величину ΔϕM, ΔϕAZ, что и обеспечивает осуществление компенсации углового сдвига вектора направленности излучения, падающего и отраженного от данного зеркала 19. На фиг.2 пьезоэлементы 79 условны показаны в виде двух пьезоэлементов поз.63, подсоединенных к блоку управления 64.
На фиг. 2 позицией 16 показан первый вариант выполнения блока угловой компенсации с блоком управления 17.
В качестве первого варианта использована акустооптическая двухкоординатная ячейка 16, в которой в двух взаимно перпендикулярных направлениях возбуждены акустические волны, обуславливающие в режиме дифракции Брэгга отклонение светового пучка на угол, определяемый частотой (длиной волны) возбуждаемой акустической волны. При изменении частоты возбуждаемых волн в двух взаимно перпендикулярных направлениях осуществляют изменение углов отклонения проходящего через ячейку 16 светового пучка также в двух взаимно перпендикулярных направлениях ϕAZ и ϕM в соответствии с частотами двух управляющих сигналов, формируемых блоком управления 17. Последний содержит два генератора высокочастотных сигналов с перестраиваемой частотой, управляемых по сигналам от блока обработки информации 6, в котором вырабатывают сигналы управления для блока угловой компенсации 16, пропорциональные величине необходимого компенсирующего углового сдвига в соответствии с изложенным выше.
Третьим вариантом блока угловой компенсации может быть использован применяемый в качестве прецизионных дефлекторов пространственный модулятор света с электронной адресацией [6], [7]. Данный пространственный модулятор содержит электрооптический кристалл, прозрачный для рабочей длины волны λраб, на котором с помощью электронного луча наносят зарядный рельеф с заданным законом пространственного распределения, обеспечивающий вследствие электрооптического эффекта сдвиг фазы проходящего света и отклонение его на заданный угол относительно нормали к оси кристалла, совпадающей с оптической осью распространения светового пучка. Особенностью данного устройства как дефлектора является высокая точность установления величины угла отклонения и высокое быстродействие, обусловленное безынерционностью электронного луча.
При реализации предлагаемого способа возможен второй вариант компоновки части устройства, расположенной на борту платформы ЛА. Блок-схема второго варианта представлена на фиг.6. Данный вариант отличается тем, что входная ось первого блока наведения А3-A1-А2 расположена горизонтально, параллельно оси летательного аппарата, в результате чего исключено одно из отражательных зеркал (поз. 13), а светоделительное зеркало 10 выполнено без центрального отверстия, что упрощает конструкцию данного зеркала. Вращение поворотного зеркала 18 вокруг указанной оси А3-А2 обеспечивает сканирование по углу места, а выходная ось первого блока наведения 4 осуществляет азимутальное сканирование, что позволяет упростить организацию сопровождения объектов, находящихся в зените. Размер вновь введенного малоразмерного отражательного зеркала 81 составляет 0,1 от входной апертуры светоделительного зеркала 10.
Данная компоновка является более простой и обладает преимуществом, в основном определяемым, как указано, улучшением работы первого блока наведения 4 по объектам, находящимся в области зенита.
В устройстве, реализующем способ, в качестве первого и второго блоков обработки информации 6, 30 использованы стандартные ЭВМ, снабженные цифровыми процессорами, таймерами, цифровыми блоками ввода - вывода информации, обеспечивающими возможности параллельной работы с элементами устройства.
Устройство, реализующее способ, содержит виброзащитное основание 82, на котором размещены элементы устройства, расположенные на борту летательного аппарата 1. Данное виброзащитное основание, условно показано на фиг.1 позицией 82, представляет собой металлическую раму 82, соединенную с корпусом ЛА 1 через виброгасящие несущие элементы 83, например пружины.
Все элементы устройства, расположенные на борту ЛА 1, установлены на виброзащитном основании 82. Это позволяет снизить уровень вибраций летательного аппарата 1, воздействующих на оптические элементы устройства, реализующего способ.
На фиг. 7 представлена схема второго варианта блока обращения волнового фронта (ОВФ - поз. 29 на фиг.1). Данный вариант выполнения блока ОВФ содержит последовательно расположенные на оптической оси В2-В6 первую 84 и вторую 85 кюветы с прозрачными окнами, заполненные рабочим веществом, с помощью которого осуществляют формирование обращенной волны, например, смесью газов (SF6= 1 атм + Хе=20 атм). Первая 86 и вторая 87 проекционные линзы осуществляют проектирование центральной области первой кюветы 84 - точка В2 на центральную область второй кюветы 85 - точка В6. Проекционные линзы 86, 87 расположены на двойном фокусном расстоянии 2fл от центров соответствующих кювет и развернуты относительно оси В2-В6 для исключения влияния бликов. Использование блока ОВФ представленной конструкции позволяет увеличить область взаимодействия, в которой генерируется обращенная волна, снизить уровень пороговой интенсивности генерации обращенной волны и обеспечить селекцию шумового излучения, идущего под большими углами к оси В2-В6 за счет работы первой кюветы 84 в качестве "мягкой диафрагмы", т.е. диафрагмы с нечетко выраженными краями.
Достигаемым техническим результатом при реализации предлагаемого способа является повышение точности наведения мощного излучения на движущийся объект. Повышение точности достигается за счет использования информации о координатах вектора направленности мощного рабочего излучения на момент времени его прихода на платформу ЛА в заданную точку A1, относительно которой определяют координаты объекта и параметры его движения. Согласно предлагаемому способу координаты движущегося объекта и параметры вектора оси источника рабочего излучения определяют в единой системе координат, связанной с платформой ЛА 1, с помощью одного и того же первого фотоприемного блока 9, в котором предусмотрен режим предварительного определения координат в широком (поисковом) поле зрения и режим определения координат с высокой степенью точности в более узком центральном поле зрения с помощью второго многоэлементного фотоприемника 47. При этом с помощью первого блока наведения 4 осуществляют слежение за движущимся объектом с учетом параметров вектора направления оси источника рабочего излучения в системе координат, связанной с точкой А1, т.е. осуществляют наведение выходной оси первого блока наведения 4 в первую уточненную точку ожидаемого нахождения объекта. Таким образом, первый блок наведения 4 реализует режим слежения за двумя динамическими объектами: собственно объектом наведения (целью) и источником рабочего излучения, определяемым координатами его вектора направленности оси относительно системы координат, связанной с точкой А1. Точность наведения излучения на объект в предлагаемом способе будет существенно лучше, чем в прототипе, в котором отслеживание оси источника рабочего излучения не производят и компенсацию изменения координат его вектора направленности не осуществляют.
В предлагаемом способе и устройстве для его реализации возможен второй режим раздельного слежения за указанными двумя динамическими объектами, при котором слежение за объектом осуществляют с помощью первого блока наведения 4, а слежение за источником рабочего излучения осуществляют с помощью третьего блока наведения 5. При этом с помощью третьего блока наведения 5 осуществляют наведение вектора направленности оси источника рабочего излучения в первую заданную точку A1, т.е. динамическое совмещение оси источника рабочего излучения в системе координат, связанной с точкой А1 с направлением неподвижной входной оси А1-А3 первого блока наведения 4. Этим осуществляют динамическую компенсацию отклонений вектора направленности оси источника рабочего излучения от направления оси А1-А3, что, соответственно, исключает составляющую динамической ошибки наведения, которая обусловлена нестабильностью (отклонением) направления оси источника рабочего излучения во времени.
Вторым фактором, обеспечивающим повышение точности наведения излучения на объект при использовании предлагаемого способа, является осуществление контроля точности наведения путем определения величины ошибки наведения и ее компенсация при осуществлении наведения рабочего импульса излучения на объект. При этом осуществляют подсвет объекта специальным импульсом зондирующего излучения, а запуск источника рабочего излучения не производят. Определение ошибки наведения осуществляют путем определения реальных координат объекта, полученных в момент прихода на объект зондирующего излучения, имитирующего приход рабочего излучения, и сравнения полученных координат объекта с прогнозируемыми параметрами координат точки ожидаемого нахождения объекта, в которую было осуществлено наведение выходной оси первого блока наведения.
Определение ошибки наведения может быть осуществлено однократно в результате одного цикла подсвета объекта зондирующим излучением и определением одной реализации ошибки наведения или путем многократного подсвета объекта серией зондирующих импульсов, определения текущей ошибки наведения для каждого отдельного элементарного зондирующего импульса подсвета объекта, определения средней величины ошибки наведения на основе полученной серии текущих ошибок наведения. Компенсацию динамического отклонения оси источника рабочего излучения от главной оси - направления А2-А1-А3 - осуществляют на основе полученной средней величины ошибки наведения.
Третьим фактором, повышающим точность излучения, согласно предлагаемому способу является компенсация мгновенною отклонения оси источника рабочего излучения в момент формирования импульса вспомогательного излучения. Точная компенсация возможна вследствие того обстоятельства, что вектор направленности рабочего излучения в момент его прихода в точку А2 на отражательное зеркало 22 третьего блока наведения 5 определяется направлением в этот момент времени оси В1-В3-В4-А2. Поэтому определение в этот момент времени направления указанной оси в системе координат относительно точки A1 с помощью излучения первого задающего генератора 40 позволяет с высокой степенью точности определить мгновенное отклонение оси рабочего излучения в момент его прихода в точку А2 отражательного зеркала 22 на платформу ЛА 1 от направления оси А2-А1-А3. Это мгновенное отклонение сравнивают с величиной динамического отклонения от источника рабочего излучения (ранее определенной), компенсация которой была ранее осуществлена, и определяют разность этих величин, на основе которой осуществляют окончательную угловую компенсацию направления вектора оси рабочего излучения в момент его распространения от точки А2 до точки А3 до окончательной операции наведения излучения на объект. Дополнительным фактором, повышающим эффективность работы устройства, реализующего способ, как системы наведения излучения, является осуществление компенсирующих сдвигов оси вспомогательного излучения до момента формирования импульса вспомогательного излучения, на основе которого осуществляют формирование рабочего излучения на основе ОВФ.
Увеличение точности наведения излучения на объект обуславливает повышение плотности энергии излучения на объекте.
Действительно, для решения задачи доставки излучения на объект необходимо обеспечить выполнение следующего соотношения, связывающего расходимость излучения Θп, угловые размеры объекта Θоб и величину χ, которая характеризует рассогласование угловых координат объекта и угловых координат вектора направления оси излучения (лазерного пучка) в момент прихода излучения на объект в плоскости объекта: .
.
Величина χ суммарно характеризует эффективность работы системы наведения излучения на объект и является суммарной ошибкой наведения излучения. Можно показать, что эта величина равна
χ = δΘсн+δro (33),
где δΘсн - среднеквадратичная ошибка установления оси пучка излучения, отнесенная к плоскости объекта в момент прихода излучения;
δro - среднеквадратичная ошибка определения координаты объекта для момента прихода излучения на объект.
В результате использования предлагаемого способа обеспечивается уменьшение величины суммарной ошибки наведения χ (32).
При использовании в качестве модели лазерного излучения, доставляемого на объект, гауссова пучка величина осевой плотности энергии A2(z) на расстоянии z от источника излучения равна
где Io - полная энергия, излучаемая источником (лазерным генератором),
Wo - радиус гауссова пучка по уровню 1/е амплитуды в зоне перетяжки (у источника),
λ - длина волны.
Плотность энергии гауссова пучка в его рабочей зоне на расстоянии z от источника равна ,
,
где
- радиус рабочей зоны пучка в плоскости объекта на расстоянии z от источника; r - расстояние от оси пучка излучения.
Тогда для малой величины размера объекта Θоб≪ θ
χ≤θп/2 (36).
Гарантированная плотность энергии, доставленной на объект будет, равна ,
,
где δ = χ•z - суммарная ошибка наведения излучения в линейной мере.
Величина E(δ, z) характеризует минимальный гарантированный уровень плотности энергии на объекте, соответствующий положению объекта на границе рабочей зоны пучка, определяемый радиусом W(z).
Относительная величина плотности энергии η на объекте в зависимости от ошибки наведения δ равна (38).
(38).
Соответственно для η в угловых параметрах получаем: ,
,
где  - угловая расходимость излучения, выраженная через параметры гауссова пучка, принятого в качестве модели излучения, доставляемого на объект.
- угловая расходимость излучения, выраженная через параметры гауссова пучка, принятого в качестве модели излучения, доставляемого на объект.
Таким образом, при уменьшении ошибки наведения χ относительная величина плотности энергии на объекте возрастает экспоненциально в соответствии с представленным соотношением (39), что доказывает повышение эффективности доставки излучения на объект и повышение плотности энергии на объекте в результате реализации предлагаемого способа. Следует отметить, что увеличение точности наведения излучения на объект, достигаемое при реализации предлагаемого способа, позволяет реализовать и использовать лазерные пучки с более низкой расходимостью Θп, что непосредственно следует из условия (32), определяющего ограничения на величину расходимости используемого для доставки излучения лазерного пучка при известном достигнутом уровне величины ошибки наведения излучения. Использование ОВФ при формировании рабочего излучения позволяет реализовать весьма малый уровень расходимости, ограниченный лишь дифракционным пределом. Поэтому при использовании предлагаемого способа доставки излучения на объект единственным фактором, ограничивающим плотность энергии на объекте и эффективность работы системы доставки излучения, будет являться точность наведения излучения. Рассмотрим основные физические ограничения на величину ошибки наведения в устройстве, реализующем предлагаемый способ.
В устройстве, реализующем способ, слежение за движущимся объектом и наведение излучения на объект осуществляют посредством блоков наведения, которые содержат поворотные отражательные зеркала, укрепленные в блоке вращения, положение в пространстве которых изменяется посредством электромеханических приводов - электродвигателей с аналоговым или цифровым управлением. С точки зрения механики отражательное зеркало с блоком вращения представляет собой жесткий ротатор, основное уравнение динамики которого имеет следующий вид: .
.
Здесь Io - момент инерции всей механической системы поворотного зеркала блока наведения относительно оси вращения, ω - угловая скорость вращения, ho - демпфирующий механический момент, обусловленный силами трения и сопротивления, М - возмущающий момент, обусловленный вращательным моментом, создаваемым электрическим приводом под воздействием управляющего сигнала Иупр, который в общем случае равен M = Rm • Uy(t) • Re -1, где iя = Uy(t)/Rc, iя - ток в обмотке якоря электропривода, Rm - коэффициент пропорциональности, Rс - сопротивление обмотки якоря, Uу - управляющее напряжение, формируемое блоком управления и пропорциональное углу рассогласования между выходной осью блока наведения и направлением на объект: Uy = R1•[ϕo-ϕ]; ϕo и ϕ - абсолютные угловые координаты объекта и выходной оси блока наведения, R1 - коэффициент пропорциональности.
Величину ϕo-ϕ измеряет первый фотоприемный блок совместно с блоком обработки информации. Считая, что координаты выходной оси блока наведения ϕ(t) жестко связаны с текущим углом поворота электромеханической системы блока вращения отражательного зеркала и отсутствуют люфты, с учетом (40), а также соотношения  получим следующее уравнение динамики блока наведения излучения на основе отражательных (поворотных) зеркал:
получим следующее уравнение динамики блока наведения излучения на основе отражательных (поворотных) зеркал:
 - коэффициент передачи.
- коэффициент передачи.
Данное уравнение динамики соответствует модели блока наведения, в которой инерционным звеном системы наведения является собственно механический блок вращения с отражательным зеркалом, а электрические передаточные звенья являются безынерционными. Такая модель позволяет определить влияние на динамику блока наведения основных параметров - массы и инерционности блока вращения с отражательным крупногабаритным зеркалом, момент инерции Io которого в общем случае равен Io = K2mR3 2, где m - общая масса блока вращения с отражательным зеркалом, R3 - радиус отражательного зеркала; К2 - коэффициент, определяемый конструкцией и формой зеркала и равный, например, K2 = 1/2 для круглого зеркала. На основании анализа стандартного уравнения динамики системы наведения можно показать, что данная система наведения на основе крупногабаритных зеркал с электромеханическими приводами характеризуется следующими параметрами:
время τy установления переходного процесса в системе (41) вида  равно
равно .
.
Условие апериодичности переходного процесса
ho ≥ 2(IoRo)1/2 (43).
При большом коэффициенте передачи Ro, одновременно удовлетворяющем условию (43), время установления переходного процесса стремится к минимальной величине
τm ≅ 3T = 6Io/ho (44).
Величина τm является минимальной величиной длительности переходного процесса, которую можно реализовать в блоке наведения с элетромеханическими приводами и заданными параметрами момента инерции Io и демпфирующего момента ho. Величина τmin определяет быстродействие блока наведения и характеризует величину ошибки наведения при слежении за быстродвижущимися динамическими объектами. В общем случае ошибка наведения δΘ при наведении выходной оси блока наведения на динамический объект пропорциональна величине
δΘ = τm•δUo (45),
где δUo - среднеквадратичная ошибка определения скорости движения динамического объекта в системе наблюдения и прогнозирования траектории и параметров движения объекта.
Соотношения (45), (32) позволяют непосредственно связать величину ошибки наведения с параметрами блока наведения и расходимостью используемого и сформированного рабочего излучения. Полагаем расходимость Θп излучения ограниченной только дифракционным пределом и равной .
.
Для величины ошибки наведения получаем следующую оценку: .
.
Соотношение (47) показывает, что уменьшение расходимости излучения приводит в общем случае к увеличению ошибки наведения вследствие увеличения габаритов зеркал R3 и момента инерции системы вращения Io. Относительную величину расходимости используемого рабочего излучения можно определить на основании (47) и соотношения (32)  устанавливающего взаимосвязь между минимальной расходимостью используемого излучения и допустимой величиной ошибки наведения. Отсюда получаем следующую оптимальную величину используемой расходимости излучения, соответствующей равенству в (32):
устанавливающего взаимосвязь между минимальной расходимостью используемого излучения и допустимой величиной ошибки наведения. Отсюда получаем следующую оптимальную величину используемой расходимости излучения, соответствующей равенству в (32): .
.
Величина (48) характеризует оптимальную расходимость используемого рабочего излучения, которая определяется только конструктивными параметрами используемого блока наведения - массой блока вращения с отражательным зеркалом m, конструктивным коэффициентом К2 и величиной демпфирующего механического момента ho. За величину δUo следует принять некоторую максимальную оценку величины ошибки определения скорости движения объекта, обусловленную возможностями измерения и прогнозирования его параметров движения.
В предлагаемом способе и устройстве для его осуществления возможна реализация данной минимальной расходимости излучения Θп вследствие того, что ряд факторов, влияющих на уровень используемой и достигнутой минимальной расходимости излучения, исключены (или скомпенсированы). К таким факторам, как показано выше, относятся компенсация атмосферной турбулентности посредством ОВФ и компенсация ряда факторов, влияющих на ошибку наведения путем более точного наведения оси источника рабочего излучения на принимающую платформу ЛА и исключение ошибок наведения в системе первого блока наведения. Уменьшение расходимости используемого излучения до оптимальной возможной величины Θп (48) в предлагаемом устройстве позволяет, соответственно, реализовать более высокую плотность излучения на объекте.
Следует отметить, что при выносе платформы ЛА в космическое пространство (в невесомости) массу блока вращения m с отражательным зеркалом можно существенно уменьшить и повысить эффективность системы наведения излучения за счет соответственного уменьшения расходимости излучения в (48).
Применение предлагаемого способа и устройства для его осуществления в системах доставки излучения на движущиеся объекты позволяет получить следующие результаты:
обеспечить повышение точности наведения мощного излучения на движущийся объект за счет исключения в процессе наведения ошибок, обусловленных отклонением оси источника рабочего излучения от заданного направления и другими факторами;
обеспечить увеличение плотности энергии излучения на объекте за счет компенсации атмосферных искажений при осуществлении ОВФ и одновременном повышении точности наведения излучения.
Проведенные на предприятии исследования экспериментального макета, реализующего предложенный способ, подтвердили получение новых технических результатов.
Источники информации
1. Арбатов А.Г. и др. Космическое оружие: дилемма безопасности. Под ред. Е.П. Велихова. - М., Мир, 1986 г. с.37 рис.1.4.
2. Воронцов М.А., Шмальгаузен В.И. Принципы адаптивной оптики. - М., Наука, 1985, с.92, рис 8.13.
3. Патент РФ 2033629, опубл. 20.04.95. Бюл. 11.
4. Патент РФ 2124740, опубл. 10.01.99. Бюл. 1 /Прототип/.
5. С. К. Манкевич и др. Многоканальная матрица для оперативной внутрирезонаторной селекции направлений излучения. Тезисы докладов 15йВсесоюзн. НТК: Высокоскоростная фотография и метрология быстропротекающих процессов. М., ВНИИОФИ. 1991 г., стр.119.
6. Авт. свид. СССР 669976, а.з. 2464830 от 21.03.1977 г. Манкевич С.К. и др. Электронно-лучевая светомодулирующая трубка.
7. Манкевич С.К., Нагаев А.И., Парыгин В.Н. и др. Отклонение света при помощи пространственного модулятора с электронной адресацией. -Радиотехника и электроника, 1982 г., том 27, 3, стр.529.
8. Открытие 215 от 12.07.1979 г. Приоритет 6.01.1972 г. Обращение волнового фронта. Зельдович Б.Я., Носач О.Ю., Рагульский В.В. и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2125279C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124740C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2110079C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
| УСТРОЙСТВО ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1990 |
|
RU2033629C1 |
| СПОСОБ ЮСТИРОВКИ ПРИЕМО-ПЕРЕДАЮЩЕЙ ЛАЗЕРНОЙ ЛОКАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2120645C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2042156C1 |
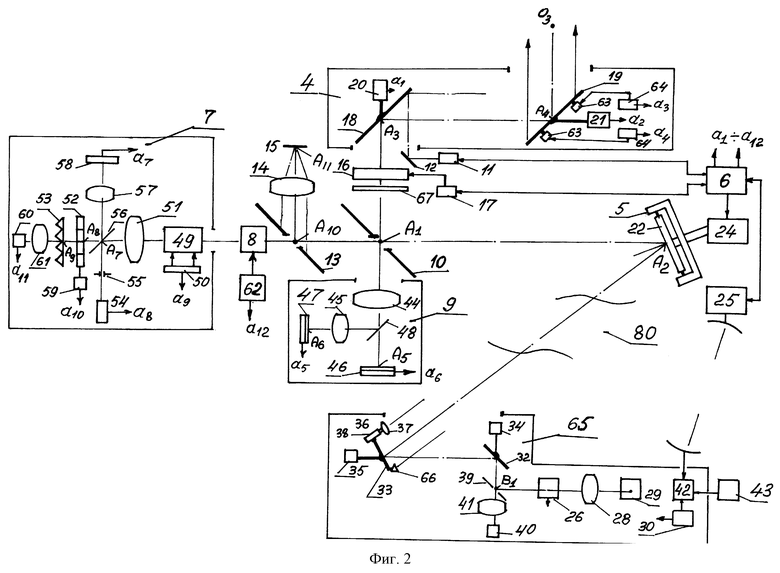
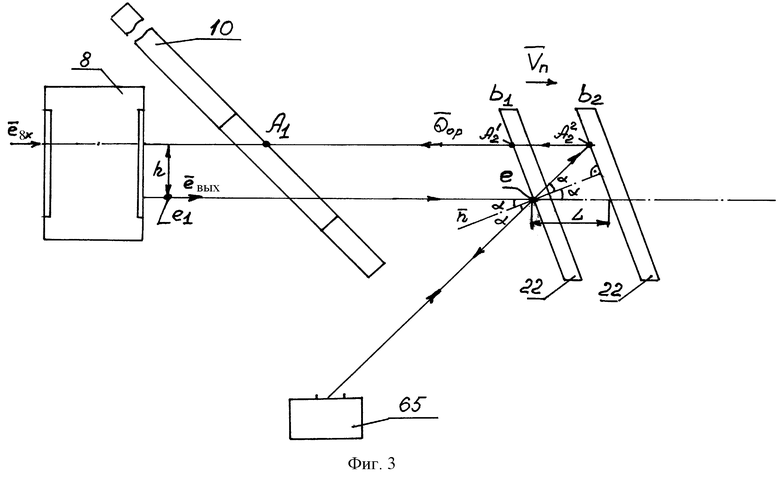
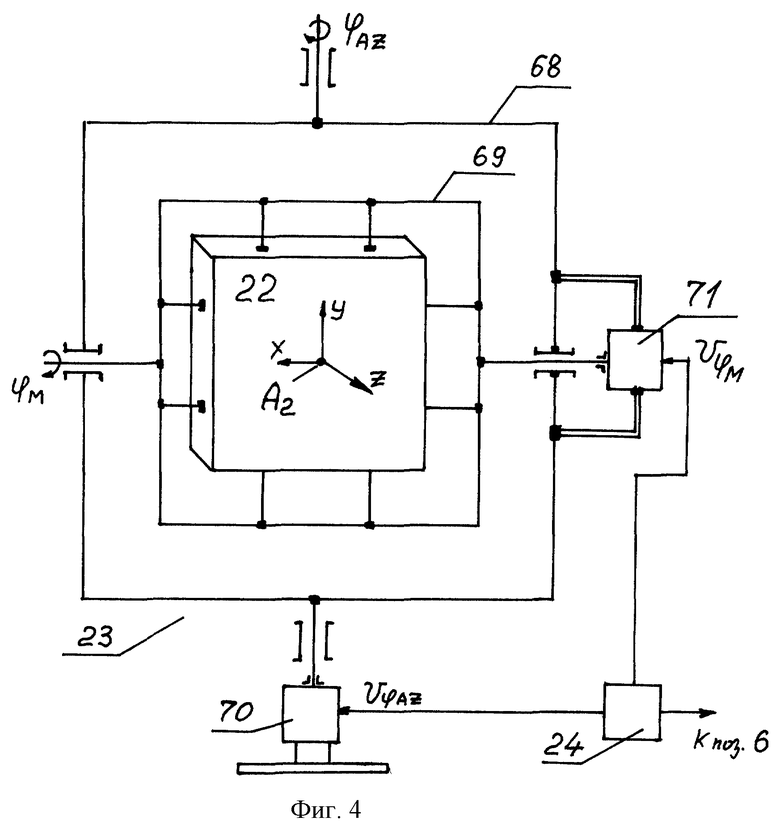
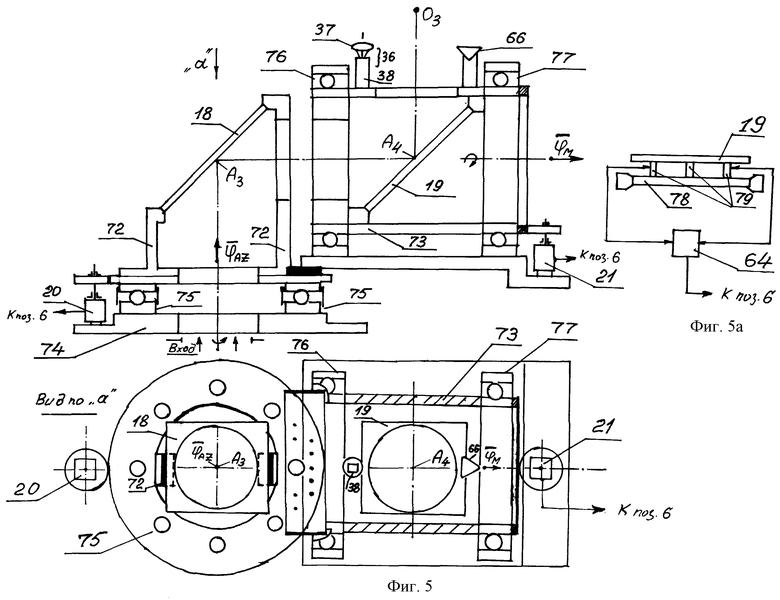
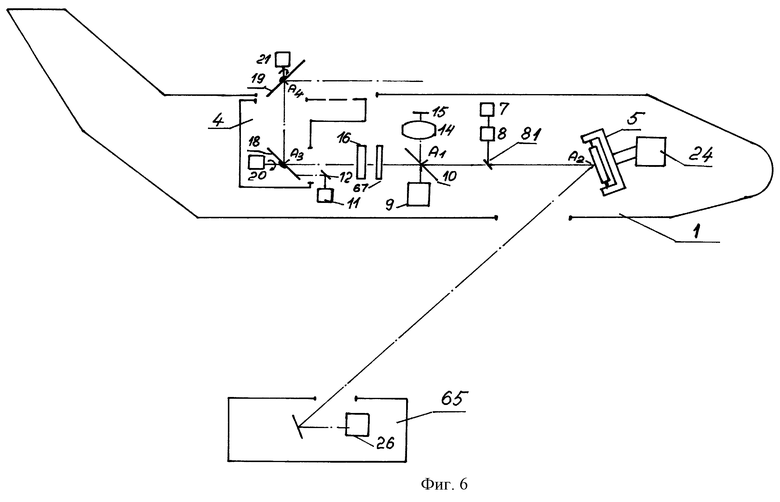
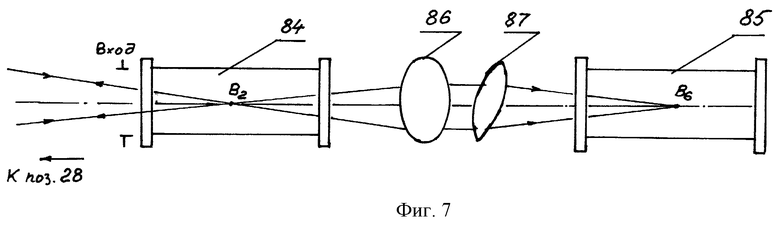
Изобретение относится к области лазерной локации и квантовой электроники, а также к системам доставки мощного излучения на воздушные и космические объекты. Достигаемым техническим результатом является повышение точности наведения излучения на движущийся объект, увеличение плотности энергии излучения на объекте. Технический результат достигается тем, что согласно предлагаемому способу осуществляют определение текущих координат объекта относительно платформы летательного аппарата (ЛА), осуществляют наведение оси источника вспомогательного излучения на ось источника рабочего излучения, определяют координаты вектора направленности оси источника рабочего излучения, осуществляют наведение оси источника рабочего излучения в уточненную точку ожидаемого нахождения объекта, осуществляют контроль точности наведения излучения на объект, вводят компенсирующий угловой сдвиг в направление распространения рабочего излучения и формируют рабочее излучение посредством обращения волнового фронта излучения от источника вспомогательного излучения. 2 с. и 13 з.п. ф-лы, 7 ил.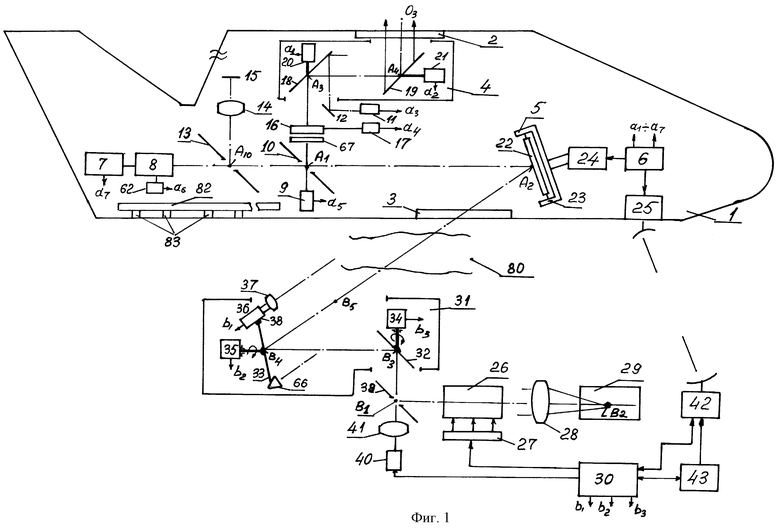
 дальности R(t0) и скорости
дальности R(t0) и скорости  объекта относительно первой заданной точки пространства А1 в системе координат, связанной с платформой летательного аппарата (ЛА), движущейся относительно источника рабочего излучения, расположенного на земной поверхности, определении расстояния между платформой ЛА и источником рабочего излучения, расположенного на земной поверхности, формировании вспомогательного излучения посредством источника вспомогательного излучения, расположенного на платформе летательного аппарата, формировании рабочего излучения посредством обращения волнового фронта (ОВФ) вспомогательного излучения, наведения оси рабочего излучения из первой заданной точки пространства А1 в точку ожидаемого нахождения объекта с координатами вектора
объекта относительно первой заданной точки пространства А1 в системе координат, связанной с платформой летательного аппарата (ЛА), движущейся относительно источника рабочего излучения, расположенного на земной поверхности, определении расстояния между платформой ЛА и источником рабочего излучения, расположенного на земной поверхности, формировании вспомогательного излучения посредством источника вспомогательного излучения, расположенного на платформе летательного аппарата, формировании рабочего излучения посредством обращения волнового фронта (ОВФ) вспомогательного излучения, наведения оси рабочего излучения из первой заданной точки пространства А1 в точку ожидаемого нахождения объекта с координатами вектора  посредством первого блока наведения, расположенного на платформе летательного аппарата, отличающийся тем, что до формирования вспомогательного излучения посредством источника вспомогательного излучения, расположенного на платформе летательного аппарата, осуществляют наведение оси источника вспомогательного излучения, расположенного на платформе летательного аппарата, на ось источника рабочего излучения, расположенного на земной поверхности, осуществляют определение пространственных координат вектора направленности
посредством первого блока наведения, расположенного на платформе летательного аппарата, отличающийся тем, что до формирования вспомогательного излучения посредством источника вспомогательного излучения, расположенного на платформе летательного аппарата, осуществляют наведение оси источника вспомогательного излучения, расположенного на платформе летательного аппарата, на ось источника рабочего излучения, расположенного на земной поверхности, осуществляют определение пространственных координат вектора направленности  оси источника рабочего излучения относительно первой заданной точки пространства А1 в момент времени t1, определяют координаты первого вектора разности
оси источника рабочего излучения относительно первой заданной точки пространства А1 в момент времени t1, определяют координаты первого вектора разности  между координатами вектора
между координатами вектора  точки ожидаемого нахождения объекта и координатами вектора направленности
точки ожидаемого нахождения объекта и координатами вектора направленности  оси источника рабочего излучения относительно первой заданной точки пространства А1
оси источника рабочего излучения относительно первой заданной точки пространства А1
осуществляют наведение выходной оси первого блока наведения, расположенного на платформе летательного аппарата, в первую уточненную точку ожидаемого нахождения объекта с координатами  равными первому вектору разности
равными первому вектору разности 
осуществляют контроль точности наведения излучения на объект путем определения вектора  ошибки наведения излучения на объект в момент прихода излучения на объект, осуществляют компенсацию измеренной ошибки наведения путем наведения выходной оси первого блока наведения, расположенного на платформе летательного аппарата, во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами
ошибки наведения излучения на объект в момент прихода излучения на объект, осуществляют компенсацию измеренной ошибки наведения путем наведения выходной оси первого блока наведения, расположенного на платформе летательного аппарата, во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами  , равными сумме координат
, равными сумме координат  первой уточненной точки ожидаемого нахождения объекта и координат вектора
первой уточненной точки ожидаемого нахождения объекта и координат вектора  ошибки наведения излучения на объект
ошибки наведения излучения на объект
осуществляют смещение оси источника вспомогательного излучения, расположенного на платформе летательного аппарата, параллельно самой себе в плоскости, перпендикулярной этой оси, на величину, пропорциональную расстоянию от платформы ЛА до источника рабочего излучения, расположенного на земной поверхности, и величине скорости платформы ЛА относительно источника рабочего излучения, расположенного на земной поверхности, в момент времени формирования импульсов вспомогательного излучения определяют координаты вектора направления оси источника рабочего излучения  в системе координат, связанной с первой заданной точки А1, определяют координаты второго вектора разности
в системе координат, связанной с первой заданной точки А1, определяют координаты второго вектора разности  между ранее определенным вектором направленности оси источника рабочего излучения
между ранее определенным вектором направленности оси источника рабочего излучения  в момент времени t1 и вектором направления оси источника рабочего излучения
в момент времени t1 и вектором направления оси источника рабочего излучения  координаты которого определены в момент времени формирования импульса вспомогательного излучения
координаты которого определены в момент времени формирования импульса вспомогательного излучения
на основании полученных величин пространственных координат второго вектора разности  формируют компенсирующий угловой сдвиг, пропорциональный величинам пространственных координат второго вектора разности
формируют компенсирующий угловой сдвиг, пропорциональный величинам пространственных координат второго вектора разности  осуществляют введение компенсирующего углового сдвига в направление распространения рабочего излучения в момент времени его прихода на платформу ЛА, осуществляют наведение рабочего излучения из первой заданной точки пространства А1 во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами
осуществляют введение компенсирующего углового сдвига в направление распространения рабочего излучения в момент времени его прихода на платформу ЛА, осуществляют наведение рабочего излучения из первой заданной точки пространства А1 во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами  посредством первого блока наведения, расположенного на платформе летательного аппарата, при этом суммирование векторов и их координат осуществляют по правилам суммирования векторных величин, каждый вектор характеризуется угловыми координатами направления своей оси относительно главной оси используемой системы координат с центром в первой заданной точке пространства А1.
посредством первого блока наведения, расположенного на платформе летательного аппарата, при этом суммирование векторов и их координат осуществляют по правилам суммирования векторных величин, каждый вектор характеризуется угловыми координатами направления своей оси относительно главной оси используемой системы координат с центром в первой заданной точке пространства А1. вектора направленности оси источника рабочего излучения формируют зондирующее лазерное излучение посредством первого задающего генератора, расположенного на земной поверхности, вектор направленности оси которого совпадает с направлением оси источника рабочего излучения, направляют сформированное зондирующее лазерное излучение от источника рабочего излучения, расположенного на земной поверхности, в первую заданную точку А1 пространства и определяют пространственные координаты вектора направленности сформированного зондирующего лазерного излучения в системе координат относительно точки А1, полученные значения координат принимают за пространственные координаты
вектора направленности оси источника рабочего излучения формируют зондирующее лазерное излучение посредством первого задающего генератора, расположенного на земной поверхности, вектор направленности оси которого совпадает с направлением оси источника рабочего излучения, направляют сформированное зондирующее лазерное излучение от источника рабочего излучения, расположенного на земной поверхности, в первую заданную точку А1 пространства и определяют пространственные координаты вектора направленности сформированного зондирующего лазерного излучения в системе координат относительно точки А1, полученные значения координат принимают за пространственные координаты  вектора направленности оси источника рабочего излучения.
вектора направленности оси источника рабочего излучения. на момент времени прихода на объект зондирующего излучения, определяют координаты вектора разности
на момент времени прихода на объект зондирующего излучения, определяют координаты вектора разности  между точкой реального положения объекта с координатами
между точкой реального положения объекта с координатами  в момент времени прихода зондирующего излучения на объект и точкой ожидаемого нахождения объекта с координатами
в момент времени прихода зондирующего излучения на объект и точкой ожидаемого нахождения объекта с координатами 

координаты полученного вектора разности принимают за координаты вектора  ошибки наведения излучения на объект
ошибки наведения излучения на объект  причем ось сформированного зондирующего излучения совпадает с направлением оси источника вспомогательного излучения.
причем ось сформированного зондирующего излучения совпадает с направлением оси источника вспомогательного излучения. наведения излучения на объект осуществляют многократный подсвет объекта серией импульсов зондирующего излучения посредством второго задающего генератора, расположенного на платформе летательного аппарата, для каждого из зондирующих импульсов подсвета объекта определяют вектор
наведения излучения на объект осуществляют многократный подсвет объекта серией импульсов зондирующего излучения посредством второго задающего генератора, расположенного на платформе летательного аппарата, для каждого из зондирующих импульсов подсвета объекта определяют вектор  разности между измеренными реальными координатами объекта
разности между измеренными реальными координатами объекта  на момент прихода на объект данного импульса зондирующего излучения и координатами точки
на момент прихода на объект данного импульса зондирующего излучения и координатами точки  ожидаемого нахождения объекта
ожидаемого нахождения объекта  осуществляют определение среднего вектора разности
осуществляют определение среднего вектора разности  для полученной серии произведенных измерений вектора разности
для полученной серии произведенных измерений вектора разности  , параметры полученного усредненного вектора разности
, параметры полученного усредненного вектора разности  принимают за параметры вектора ошибок
принимают за параметры вектора ошибок  наведения излучения на объект
наведения излучения на объект  , где i - номер импульса зондирующего излучения из серии импульсов с общим числом импульсов, равным М, i=1,2,3...M.
, где i - номер импульса зондирующего излучения из серии импульсов с общим числом импульсов, равным М, i=1,2,3...M. оси источника рабочего излучения относительно первой заданной точки пространства А1 осуществляют наведение оси источника рабочего излучения, расположенного на земной поверхности, в первую заданную точку пространства А1 путем введения компенсирующего углового сдвига в направление оси источника рабочего излучения, пропорционального по величине и противоположного по знаку измеренным координатам вектора направленности оси источника рабочего излучения в системе координат относительно первой заданной точки А1 посредством третьего блока наведения, расположенного на платформе летательного аппарата.
оси источника рабочего излучения относительно первой заданной точки пространства А1 осуществляют наведение оси источника рабочего излучения, расположенного на земной поверхности, в первую заданную точку пространства А1 путем введения компенсирующего углового сдвига в направление оси источника рабочего излучения, пропорционального по величине и противоположного по знаку измеренным координатам вектора направленности оси источника рабочего излучения в системе координат относительно первой заданной точки А1 посредством третьего блока наведения, расположенного на платформе летательного аппарата.
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124740C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2125279C1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ КОМПОНЕНТ НАПРЯЖЕННОСТИ ТРЕХМЕРНОГО ЛАПЛАСОВСКОГО ПОЛЯ | 0 |
|
SU329540A1 |
| US 5275354 А, 04.01.1994. | |||
