Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к устройству и способу обнаружения скорости передачи данных и, в частности, к устройству и способу обнаружения скорости передачи данных турбодекодера в системе связи с подвижными объектами.
Уровень техники
В общем случае для исправления ошибки прямого канала связи в системе цифровой связи с подвижными объектами используются кодер и декодер. Система цифровой связи с подвижными объектами передает и принимает данные в радиосреде, вследствие чего в этой системе применяется некоторый метод кодирования для предотвращения генерирования шумов в канале передачи. В качестве метода кодирования в системе связи с подвижными объектами, как правило, используется метод турбокодирования.
В “Проекте сотрудничества в создании средств связи 3-го поколения” (ПСвССЗП, 3GPP) или в “Проекте-2 сотрудничества в создании средств связи 3-го поколения” (П2СвССЗП, 3GPP2), воплощаемых в процессе текущей работы по стандартизации системы связи с подвижными объектами, указано, что передаваемые данные могут передаваться с разными скоростями передачи данных. В данном случае скорость передачи данных зависит от длины (или размера) кадра, декодируемого турбодекодером. Например, скорость передачи данных, составляющая 2,4 кбит/с, соответствует длине декодируемых кадров, составляющей 24 бит/кадр, а скорость передачи данных, составляющая 4,8 кбит/с, соответствует длине декодируемых кадров, составляющей 48 бит/кадр.
При передаче данных с различными скоростями передачи данных передатчик в общем случае передает данные в приемник наряду с информацией о скорости передачи данных, характерной для данных, передаваемых в текущий момент времени. Вместе с тем, передача данных наряду с информацией о скорости передачи передаваемых данных вызывает потерю мощности передачи, особенно в случае, когда передача данных происходит с низкой скоростью передачи данных. Следовательно, существует потребность в способе передачи данных без информации о скорости передачи этих данных.
Известен метод обнаружения скорости передачи данных вслепую (ОСПВ), при котором передатчик передает данные без информации о скорости передачи этих данных, а приемник определяет скорость передачи данных только на основании принимаемых данных. Если данные передаются в режиме ОСПВ после того, как их подвергли турбокодированию, то для определения скорости передачи данных, как правило, используют результаты контроля с помощью циклического избыточного кода (ЦИК), причем этот контроль осуществляют на выходе турбодекодера.
То есть, передатчик добавляет информацию ЦИК к передаваемым данным перед передачей. Тогда декодер канала приемника декодирует принимаемые данные, переданные на всех доступных скоростях их передачи, и посредством контроля с помощью ЦИК определяет, включают ли декодированные данные в себя шумы. Если посредством контроля с помощью ЦИК, проводимого на некоторой конкретной скорости передачи данных, определяют, что кадр не испорчен, то приемник обнаруживает соответствующую скорость передачи данных. Осуществляемая приемником процедура обнаружения скорости передачи данных посредством контроля с помощью ЦИК будет подробно описана ниже со ссылками на фиг.1.
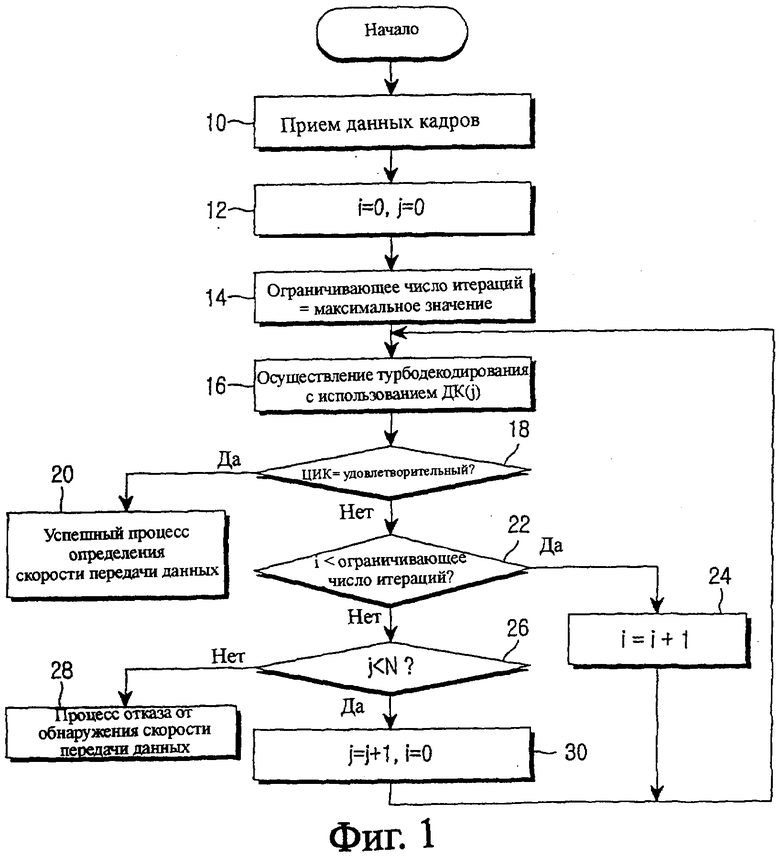
На фиг.1 изображена осуществляемая приемником процедура обнаружения скорости передачи данных посредством контроля с помощью ЦИК в рамках метода ОСПВ в системе связи с подвижными объектами, известной из уровня техники. Теперь будет приведено подробное описание обычной процедуры определения скорости передачи данных со ссылками на фиг.1.
На этапе 10 приемник, осуществляющий турбодекодирование, принимает данные кадров по радиоканалу. Описание процесса обработки радиосигналов и процесса канального декодирования, проводимых при этой процедуре, будет опущено. После того как данные кадров приняты, приемник задает значения отсчета i и j равными “0” на этапе 12. В данном случае i представляет собой значение счета числа итераций декодирования (или частоты декодирования) для осуществления турбодекодирования на одном кадре при некоторой выбранной скорости передачи данных. Далее, j представляет собой значение счета числа типов скоростей передачи данных. То есть, если турбодекодирование итеративно осуществляется 6 раз, то значение i представляет собой значение счета итераций декодирования, предназначенное для ограничения турбодекодирования не более чем 6-ю итерациями, а если число типов скоростей передачи данных равно 7, то значение j представляет собой значение счета типов скоростей передачи данных, предназначенное для осуществления декодирования с использованием до 7-ми типов скоростей передачи данных включительно.
После этапа 12 приемник задает ограничивающее число итераций равным его максимальному значению на этапе 14. В данном случае, термин “ограничивающее число итераций” обозначает максимальное число повторений итеративного декодирования при некоторой конкретной скорости передачи данных, т.е. значение, задающее порог для значения “i” счета итераций турбодекодера. На этапе 16 приемник осуществляет турбодекодирование на скорости передачи данных, которая задана равной значению j. Например, если декодирование речевых данных осуществляется на скорости передачи 2 кбит/с, 4 кбит/с и 8 кбит/с, то приемник осуществляет декодирование на данных с длиной кадра, ДК(j), связанной со скоростью передачи 2 кбит/с или 8 кбит/с, в зависимости от того, какая из них определяется первой. То есть, приемник осуществляет декодирование с одной, начальной скорости передачи данных.
После декодирования приемник анализирует результат контроля декодированных данных с помощью ЦИК на этапе 18. В результате анализа, если определено, что ЦИК является “удовлетворительным”, то приемник проводит процесс обнаружения скорости передачи данных для текущего значения j на этапе 20. В противном случае приемник определяет, является ли значение i счета итераций декодирования меньшим, чем ограничивающее число итераций, чтобы провести итерации декодирования вплоть до достижения этого ограничивающего числа итераций. Если в результате такого определения значение i счета итераций декодирования оказывается меньшим, чем ограничивающее число итераций, то приемник переходит к этапу 24, а в противном случае переходит к этапу 26. На этапе 24 приемник увеличивает значение i счета итераций декодирования на 1, а потом возвращается к этапу 16. Причина итеративного осуществления декодирования с одной скоростью передачи данных будет описана ниже со ссылками на фиг.2 и 3.
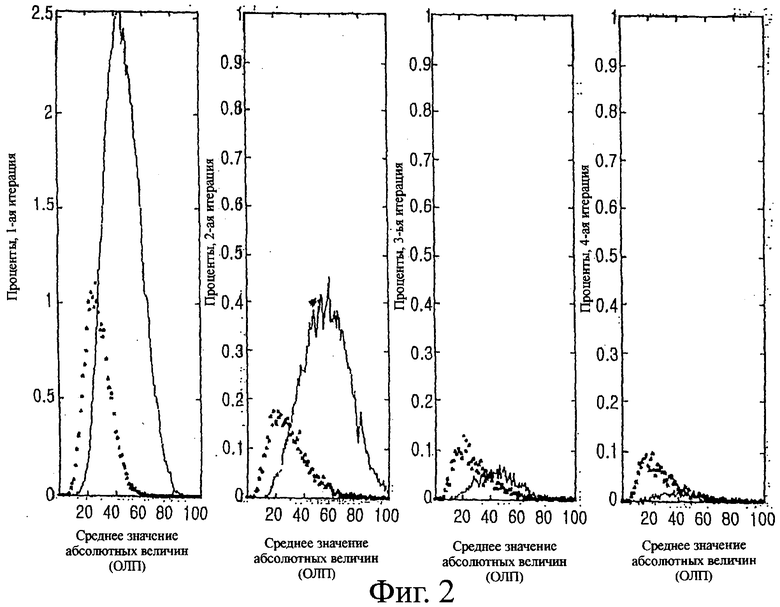
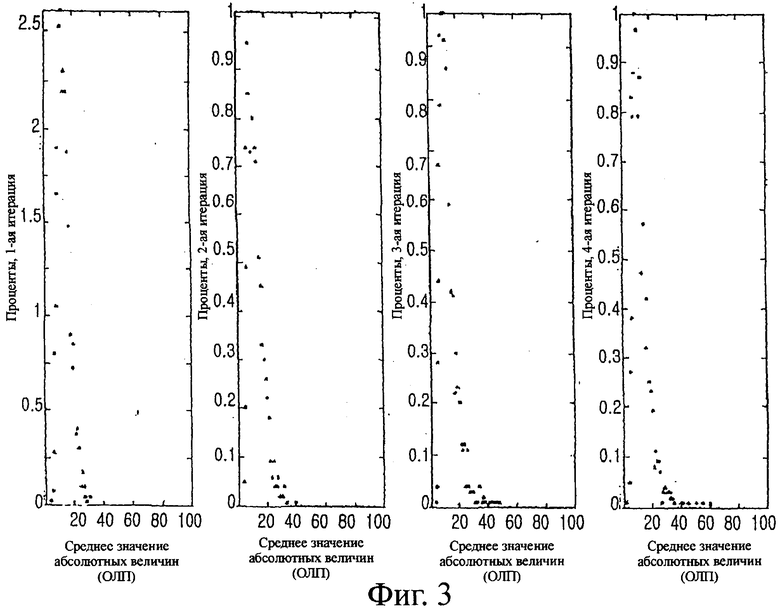
На фиг.2 изображено распределение значения m(i) состояния декодирования, указывающего качество кадра данных, когда данные с размером 60 кадра, передаваемые по радиоканалу, подвергаются итеративному турбодекодированию турбодекодером с размером 60 кадра. На фиг.3 изображено распределение значения m(i) состояния декодирования, указывающего качество кадра данных, когда данные с размером 40 кадра, передаваемые по радиоканалу, подвергаются итеративному турбодекодированию турбодекодером с размером 60 кадра.
Часть, отображенная на фиг.2 сплошной линией, представляет собой часть, имеющую значение m(i) правильно декодированного кадра, тогда как часть, изображенная точками, представляет собой неправильно декодированную часть. При осуществлении декодирования во второй раз приемник итеративно осуществляет декодирование для восстановления, используя неправильно декодированные кадры, отображенные точками. Тогда неправильно декодированные кадры снова делятся на восстановленные кадры и невосстановленные кадры, как показано на втором графике на фиг.2. Если процесс прошел несколько итераций, то данные кадров будут декодированы “правильнее”, в результате чего увеличивается вероятность того, что будет обнаружено “удовлетворительное” состояние ЦИК. Однако в случае, если декодируются данные с длиной кадра, связанной с другой скоростью передачи данных, то даже при осуществлении декодирования несколько раз результаты декодирования будут постоянно показывать состояние ошибки, изображенное на фиг.3.
Возвращаясь к фиг.1, отмечаем, что ограничивающее число итераций, как правило, задают равным 6. Если “ЦИК” не является “удовлетворительным” после проведения итераций декодирования шесть раз с одной скоростью передачи данных, то приемник на этапе 26 определяет, является ли значение j счета типов скоростей передачи данных большим, чем число N скоростей передачи данных. Если в результате такого определения значение j счета типов скоростей передачи данных является не меньшим, чем число N, составляющее, например, 3 скорости передачи данных, то приемник переходит к этапу 28 для осуществления процесса отказа от обнаружения скорости передачи данных, при условии, что декодирование и контроль с помощью ЦИК завершены для всех доступных скоростей передачи данных. Однако, если значение j счета указывает, что декодирование еще не проведено на всех скоростях передачи данных, т.е. если значение j является меньшим, чем N, то приемник увеличивает значение j счета на 1 и задает значение i счета итераций декодирования равным 0 на этапе 30, а потом возвращается к этапу 16 для повторения этапов 16-30.
Однако метод турбодекодирования для обнаружения скорости передачи данных посредством вышеупомянутого процесса вызывает потерю времени при обнаружении скорости передачи данных, особенно тогда, когда существует большая разница между скоростью передачи данных, с которой кадр данных передан, и начальной скоростью передачи данных, на которой осуществляется турбодекодирование. То есть, если предположить, например, что число скоростей передачи данных, подлежащих обнаружению, равно N, а число итераций равно 8, то декодирование проводят в худшем случае (N-1)·8 раз. Кроме того, увеличение числа скоростей передачи данных для передаваемых данных вызывает увеличение времени обнаружения, а также вызывает увеличение энергопотребления при обнаружении скорости передачи данных.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Поэтому задача настоящего изобретения состоит в том, чтобы разработать устройство и способ управления ограничивающим числом итераций для турбодекодирования при обнаружении скорости передачи турбокодированных данных в режиме ОСПВ.
Еще одна задача настоящего изобретения состоит в том, чтобы разработать устройство и способ уменьшения времени задержки и энергопотребления при обнаружении скорости передачи турбокодированных данных в режиме ОСПВ.
В соответствии с одним аспектом настоящего изобретения предложен способ декодирования кодированных данных в одном кадре, передаваемых из передатчика с одной скоростью передачи данных из множества скоростей передачи данных, с помощью турбодекодера приемника, не имеющего информацию о скорости передачи данных, с которой передают кодированные данные, и обнаружения скорости передачи данных, характерной для кодированных данных, заключающийся в том, что
(а) декодируют кодированные данные в кадре с выбранной скоростью передачи данных из множества скоростей передачи данных с помощью турбодекодера и вычисляют значение состояния текущего декодирования, указывающее среднее значение абсолютных величин отношения логарифмического правдоподобия (ОЛП), идентичных декодированным значениям кодированных данных, выводимых из турбодекодера,
(б) вычисляют значение состояния текущего неполного декодирования, определяемое как разность между значением состояния текущего декодирования и значением состояния предыдущего декодирования,
(в) осуществляют контроль декодированных данных с помощью циклического избыточного кода (ЦИК), если значение состояния текущего декодирования больше, чем первое пороговое значение, или значение состояния текущего неполного декодирования больше, чем второе пороговое значение, и
г) определяют выбранную скорость передачи данных как скорость передачи данных, характерную для кодированных данных, передаваемых из передатчика, если результат контроля с помощью ЦИК является удовлетворительным.
В соответствии со вторым аспектом настоящего изобретения предложен способ декодирования кодированных данных в одном кадре, передаваемых из передатчика с одной скоростью передачи данных из множества скоростей передачи данных, с помощью турбодекодера приемника, не имеющего информацию о скорости передачи данных, с которой передают кодированные данные, и обнаружения скорости передачи данных, характерной для кодированных данных, заключающийся в том, что
(а) декодируют данные, кодированные с выбранной скоростью передачи данных из множества скоростей передачи данных, и осуществляют вывод декодированных данных,
(б) управляют ограничивающим числом итераций в зависимости от информации о состоянии декодирования, измеряемой для декодированных данных, если число декодирований, осуществленных с выбранной скоростью передачи данных, меньше, чем ограничивающее число итераций,
(в) осуществляют контроль декодированных данных с помощью ЦИК, если число декодирований больше, чем ограничивающее число итераций, или равно этому числу,
(г) определяют выбранную скорость передачи данных как скорость передачи данных, характерную для кодированных данных, передаваемых из передатчика, если результат контроля с помощью ЦИК является удовлетворительным,
(д) повторяют этапы (а)-(г) в рамках ограничивающего числа итераций до тех пор, пока выбранная скорость передачи данных не будет определена как скорость передачи данных, характерная для кодированных данных, если результат контроля с помощью ЦИК не является удовлетворительным, и
(е) повторяют этапы (а)-(д) до тех пор, пока другая выбранная скорость передачи данных из множества скоростей передачи данных не будет определена как скорость передачи данных, характерная для кодированных данных, если выбранная скорость передачи данных не определена как скорость передачи данных, характерная для кодированных данных.
В соответствии с третьим аспектом настоящего изобретения предложено устройство для декодирования кодированных данных в одном кадре, передаваемых из передатчика с одной скоростью передачи данных из множества скоростей передачи данных, с помощью турбодекодера приемника, не имеющего информацию о скорости передачи данных, с которой передаются кодированные данные, и для обнаружения скорости передачи данных, характерной для кодированных данных, содержащее
блок определения скорости передачи данных для выбора скорости передачи данных из множества скоростей передачи данных,
турбодекодер для итеративного декодирования кадра входных данных в рамках ограничивающего числа итераций с использованием выбранной скорости передачи данных, а также для выдачи декодированных данных,
детектор ЦИК для осуществления контроля декодированных данных с помощью ЦИК, а также для вывода результата контроля с помощью ЦИК,
блок измерения состояния декодирования для измерения качества декодирования с использованием декодированных данных, а также для вывода информации о состоянии декодирования и
контроллер для определения сначала ограничивающего числа итераций как минимального значения, управления ограничивающим числом итераций на основании информации о состоянии декодирования, управления блоком определения скорости передачи данных, а также для определения скорости передачи данных, характерной для входных данных, на основании результата контроля с помощью ЦИК.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие задачи, признаки и преимущества настоящего изобретения станут более очевидными из нижеследующего подробного описания при изучении его совместно с чертежами, где
на фиг.1 изображена осуществляемая приемником процедура обнаружения скорости передачи данных посредством контроля с помощью ЦИК в рамках метода ОСПВ в системе связи с подвижными объектами, известной из уровня техники,
на фиг.2 изображено состояние декодирования данных, когда данные с размером 60 кадра, передаваемые по радиоканалу, подвергаются турбодекодированию турбодекодером с размером 60 кадра,
фиг.3 изображено состояние декодирования данных, когда данные с размером 40 кадра, передаваемые по радиоканалу, подвергаются турбодекодированию турбодекодером с размером 60 кадра,
на фиг.4 изображена блок-схема радиоприемника для осуществления турбодекодирования в соответствии с предпочтительным конкретным вариантом осуществления настоящего изобретения,
на фиг.5 изображена процедура обнаружения скорости передачи данных в режиме ОСПВ, проводимая приемником, осуществляющим турбодекодирование, в соответствии с первым вариантом осуществления настоящего изобретения,
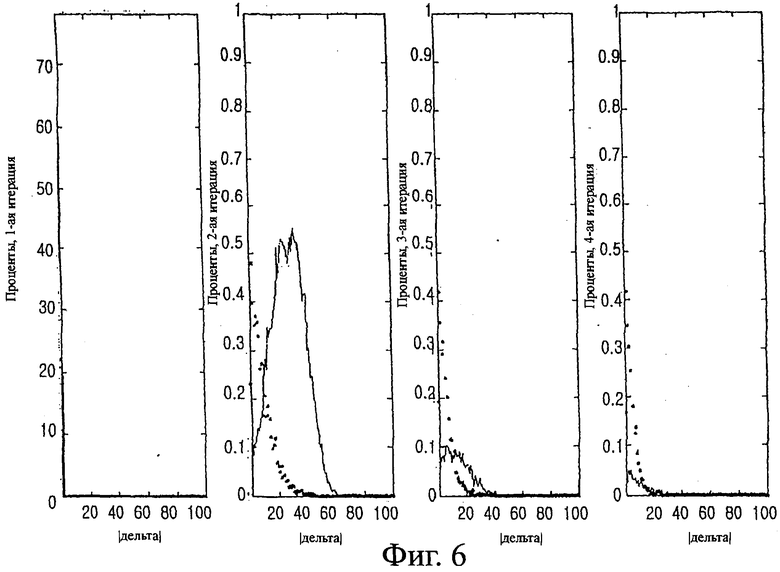
на фиг.6 изображено изменение в Δ(i), когда скорости передачи идентичны друг другу,
на фиг.7 изображено изменение в Δ(i), когда скорости передачи не идентичны друг другу,
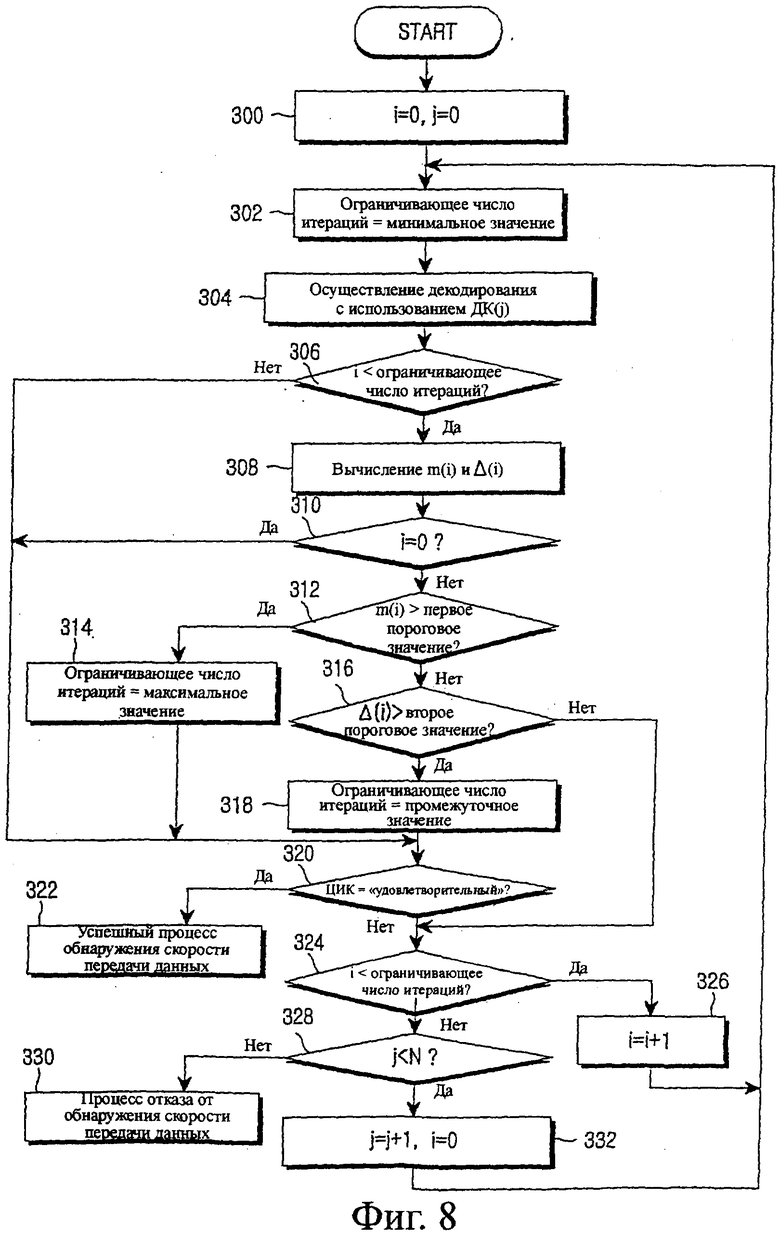
на фиг.8 изображена процедура обнаружения скорости передачи данных в режиме ОСПВ, проводимая приемником, осуществляющим турбодекодирование, в соответствии со вторым вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Ниже будет приведено подробное описание предпочтительного варианта осуществления настоящего изобретения со ссылками на прилагаемые чертежи.
На фиг.4 изображена блок-схема радиоприемника для осуществления турбодекодирования в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Ниже со ссылками на фиг.4 будет приведено подробное описание конструкции и работы радиоприемника для осуществления турбодекодирования в соответствии с настоящим изобретением.
Радиосигнал, передаваемый из передатчика, принимается в антенне АНТ приемника через радиосреду. Затем демодулятор 101 демодулирует радиосигнал. Сигнал, выходящий из демодулятора 101, дескремблируется и сжимается блоком 103 дескремблирования и сжатия. Выходной сигнал подается в буфер 105. Этот буфер 105 последовательно буферизует принимаемый сигнал в соответствии с порядком декодирования и выдает свой выходной сигнал в декодер 107.
Декодер 107, являющийся турбодекодером в соответствии с настоящим изобретением, осуществляет декодирование в соответствии со скоростью передачи данных (т.е. длиной кадра), определяемой блоком 115 определения скорости передачи данных. Длина кадра фактических данных, передаваемых и принимаемых в системе связи с подвижными объектами, принимает значения 39, 42, 49, 55, 58, 61, 65, 75 и 81 бит. Например, когда блок 115 определения скорости передачи данных “хочет” осуществить декодирование с длиной кадра 39 бит, турбодекодер 107 считывает кадр данных длиной 39 бит из буфера 105 и декодирует считываемый кадр данных. Декодированные данные выдаются в детектор 109 ЦИК и блок 111 измерения состояния декодирования.
Детектор 109 ЦИК выполняет жесткое решение и осуществляет контроль с помощью ЦИК за выходным сигналом турбодекодера 107, а также выдает результат контроля с помощью ЦИК в контроллер 113. Блок 111 измерения состояния декодирования измеряет качество декодирования для выходного сигнала турбодекодера 107 и выдает измеренный результат в контроллер 113. На основании значений результата контроллер 113 управляет значением i счета итераций декодирования, ограничивающим числом итераций, значением j счета типов скоростей передачи данных и числом N скоростей передачи данных, а также обнаруживает скорость передачи данных, передаваемых из передатчика. Кроме того, контроллер 113 генерирует сигнал, подаваемый в блок 115 определения скорости передачи данных, за счет приема значения, вычисляемого блоком 111 измерения состояния кодирования. Блок 115 определения скорости передачи данных определяет длину кадра, связанную со скоростью передачи данных, для декодирования на основании сигнала, выдаваемого из контроллера 113, и выдает определяемую длину кадра в турбодекодер 107.
Теперь со ссылками на фиг.5-8 будет описана работа по управлению радиоприемником, имеющим вышеупомянутую конструкцию.
На фиг.5 изображена процедура обнаружения скорости передачи данных в режиме ОСПВ, проводимая приемником, осуществляющим турбодекодирование, в соответствии с первым вариантом осуществления настоящего изобретения. Ниже со ссылками на фиг.4 и 5 будет приведено подробное описание осуществляемого приемником способа обнаружения скорости передачи данных посредством контроля с помощью ЦИК в рамках метода ОСПВ.
На этапе 200 контроллер 113 задает равными нулю значение i счета итераций декодирования и значение j счета типов скоростей передачи данных. Например, если по радиоканалу можно передавать кадр данных длиной 39, 42, 49, 55, 58, 61, 65, 75 и 81 бит, то число N типов скоростей передачи данных равно 9, а значение j будет отсчитываться в пределах от 0 до 8. На основании этого значения j определяют скорость передачи данных для декодирования, т.е. длину кадра. Длина кадра, ДK(j), связанная со значением j счета типов скоростей передачи данных, определяемым контроллером 113, выдается в декодер 107 из блока 115 определения скорости передачи данных. На этапе 202 контроллер 113 задает ограничивающее число итераций равным заданному минимальному значению. Это делается для того, чтобы осуществлять минимально возможное количество итеративных декодирований каждый раз, когда изменяется скорость передачи данных ДК(j).
На этапе 204 турбодекодер 107 декодирует поток данных, считываемый из буфера 105, с помощью значения ДК(j), выдаваемого из блока 115 определения скорости передачи данных, и выдает декодированные данные в детектор 109 ЦИК и блок 111 измерения состояния декодирования. Выходной сигнал турбодекодера 107 представляет собой недвоичное выходное значение, соответствующее мягкому решению. Детектор 109 ЦИК выполняет жесткое решение и осуществляет контроль с помощью ЦИК за декодированными данными, а блок 111 измерения состояния декодирования измеряет состояние (или качество) декодированных данных.
На этапе 206 контроллер 113 определяет, является ли значение i счета итераций декодирования меньшим, чем ограничивающее число итераций, заданное на этапе 202. Если в результате такого определения значение i счета итераций декодирования оказывается меньшим, чем ограничивающее число итераций, то контроллер 113 переходит к этапу 208, а в противном случае переходит к этапу 216.
На этапе 208 контроллер 113 вычисляет значение m(i) состояния декодирования, указывающее качество текущего декодированного кадра, и значение Δ(i) состояния неполного декодирования, определяемое как разность между значением состояния декодирования во время текущего декодирования и значением состояния декодирования во время предыдущего декодирования, значение m(i) вычисляют следующим образом:

В уравнении (1) символ |...| обозначает абсолютную величину, а символы “а” и “b” обозначают заданные константы, причем 0≤а<b<ДK(j). Кроме того, ОЛП (отношение логарифмического правдоподобия) представляет собой недвоичное выходное значение, соответствующее мягкому решению, декодируемому турбодекодером 107. То есть, ОЛПi(n) - это n-ое выходное значение, соответствующее мягкому решению, среди выходных значений ДK(j), соответствующих мягкому решению, из декодера 107, получаемое во время i-го итеративного декодирования для ДК(j); иными словами, это значение, которое будет востребовано тогда, когда оно преобразовано в двоичное значение жестким решением. Например, если значение ОЛП является отрицательным числом, то результатом жесткого решения является “1”, а если значение ОЛП является положительным числом, то результатом жесткого решения является “0”. Значение ОЛП используют для измерения качества декодирования, потому что если его абсолютная величина больше, то существует большая вероятность того, что жесткое решение будет выполнено надлежащим образом. То есть, можно считать, что если абсолютная величина значения ОЛП будет больше, то и качество декодирования будет выше. В данном случае, значение m(i) может быть средним значением (средним значением абсолютных величин ОЛП) абсолютных величин выходных значений ДК(j), соответствующих мягкому решению, получаемых из декодера 107. Вместе с тем, во время реальной операции декодирования можно получить аналогичный результат даже путем использования среднего значения абсолютных величин некоторых из выходных значений, т.е. выходных значений от а-го до b-го, среди выходных значений ДК(j), соответствующих мягкому решению.
Кроме того, вычисляют значение Δ(i) состояния неполного декодирования следующим образом:
Δ(i)=m(i)-m(i-1) (2)
В этой формуле m(i) обозначает значение состояния декодирования во время текущего декодирования, a m(i-1) обозначает значение состояния декодирования во время предыдущего декодирования. В результате можно отметить, что Δ(i) указывает, насколько повышается качество декодирования за счет итеративного декодирования с одной скоростью передачи данных. В данном случае Δ(i) равно “0” во время начального декодирования.
На основании уравнения (2) на фиг.6 изображено изменение в Δ (i), когда длина кадра входных данных (фактическая скорость передачи данных, используемая во время передачи), идентична длине кадра декодера (скорости передачи данных во время текущего декодирования). Из чертежа видно, что итерации декодирования вызывают изменение в Δ(i). Кроме того, на фиг.7 изображено изменение в Δ(i), когда длина кадра входных данных не идентична длине кадра декодера. На этом чертеже видно, что Δ(i) не изменяется даже в результате осуществления итераций декодирования. Как показано, изменение в Δ(i) становится основой для определения того, обнаруживается ли скорость передачи данных.
После вычисления значения m(i) и значения Δ(i) на основе уравнений (1) и (2) на этапе 208 контроллер 113 определяет на этапе 210, является ли значение m(i) большим, чем первое пороговое значение. Если в результате такого определения значение m(i) оказывается большим, чем первое пороговое значение, контроллер 113 переходит к этапу 214, а в противном случае переходит к этапу 212. В данном случае первое пороговое значение может быть задано равным минимальному значению среди значений, обуславливающих высокую вероятность того, что m(i) будет нормально декодировано. Контроллер 113 определяет на этапе 212, является ли значение Δ(i) большим, чем второе пороговое значение. Аналогично вышеизложенному, второе пороговое значение может быть задано равным минимальному значению среди значений, обуславливающих высокую вероятность того, что Δ(i) будет нормально декодировано. Если в результате такого определения значение Δ(i) оказывается большим, чем второе пороговое значение, контроллер 113 переходит к этапу 214, а в противном случае переходит к этапу 216.
На этапе 214 контроллер 113 изменяет ограничивающее число итераций, задавая это число равным его максимальному значению с учетом необходимости проведения итераций декодирования как можно большее количество раз, а потом переходит к этапу 216.
На этапе 216 контроллер 113 определяет, является ли “удовлетворительным” получаемый из детектора 109 ЦИК результат контроля с помощью ЦИК. Если результат контроля с помощью ЦИК является “удовлетворительным”, то контроллер 113 осуществляет успешный процесс обнаружения скорости передачи данных на этапе 218. То есть контроллер 113 определяет скорость передачи данных, использовавшуюся во время процесса декодирования на этапе 204, как фактическую скорость передачи данных, переданных из передатчика.
Однако, если результат контроля с помощью ЦИК не является “удовлетворительным”, то контроллер 113 на этапе 220 определяет, является ли значение i счета итераций декодирования меньшим, чем ограничивающее число итераций. Если в результате такого определения значение i оказывается меньшим, чем ограничивающее число итераций, то контроллер 113 увеличивает значение i на 1 на этапе 222, а затем возвращается к этапу 202. Однако, если значение i не оказывается меньшим, чем ограничивающее число итераций, т.е. если турбодекодирование уже проведено столько раз, сколько задано ограничивающим числом итераций, то контроллер 113 определяет на этапе 224, является ли значение j счета типов скоростей передачи данных меньшим, чем число N типов кадров. Если в результате такого определения значение j оказывается меньшим, чем число N типов кадров, то контроллер 113 увеличивает значение j счета типов скоростей передачи данных на 1 и задает значение i счета итераций декодирования равным 0 на этапе 228, а затем возвращается к этапу 202. Однако, если значение j не оказывается меньшим, чем число N скоростей передачи данных, то контроллер 113 осуществляет процесс отказа от обнаружения скорости передачи данных на этапе 226.
Суммируя сказанное о вышеупомянутых процессах, нужно отметить, что когда определены значения i и j счета и размер кадра декодера, декодер 107 осуществляет декодирование, сначала задавая ограничивающее число итераций равным его минимальному значению. Если одно значение из значений m(i) и Δ(i) оказывается большим, чем их соответствующие пороговые значения, то контролер 113 увеличивает ограничивающее число итераций до его максимального значения с учетом существования высокой вероятности того, что результат контроля с помощью ЦИК окажется “удовлетворительным” для размера текущего кадра, а затем контроллер пытается обнаружить скорость передачи данных путем проведения контроля каждого результата декодирования с помощью ЦИК после увеличения ограничивающего числа итераций до его максимального значения. Если результат контроля с помощью ЦИК не является “удовлетворительным” даже при проведении итераций декодирования столько раз, сколько предписывает максимальное ограничивающее число итераций, то контроллер 113 “приходит к выводу”, что скорость передачи данных, используемая при текущем декодировании, не идентична скорости передачи данных, использованной во время передачи. В случае, когда скорость передачи данных выбрана ошибочно, вероятность того, что значение m(i) или значение Δ(i) будут больше их соответствующих пороговых значений, весьма близка к 0. Таким образом, декодирование с текущей скоростью передачи данных будет итерироваться столько раз, сколько предписывает минимальное ограничивающее число итераций.
Если значение m(i) или значение Δ(i) больше, чем их соответствующие пороговые значения, то можно сделать вывод о существовании очень большой вероятности того, что скорость передачи данных будет обнаружена даже несмотря на не “удовлетворительный” первоначальный результат контроля с помощью ЦИК. Следовательно, декодирование с текущей скоростью передачи данных итерируется как можно большее количество раз. Как описано выше, приемник, соответствующий настоящему изобретению, уменьшает время и энергию, затрачиваемые на обнаружение скорости передачи данных, путем итеративного декодирования скорости передачи данных с меньшей вероятностью столько раз, сколько предписывает минимальное ограничивающее число итераций, и итеративного декодирования скорости передачи данных с большей вероятностью столько раз, сколько предписывает максимальное ограничивающее число итераций.
На фиг.8 изображена процедура обнаружения скорости передачи данных в режиме ОСПВ, проводимая приемником, осуществляющим турбодекодирование в соответствии со вторым вариантом осуществления настоящего изобретения. Ниже со ссылками на фиг.4 и 8 будет приведено подробное описание процедуры обнаружения скорости передачи данных в соответствии со вторым вариантом осуществления настоящего изобретения.
Этапы 300-304, показанные на фиг.8, идентичны в осуществлении этапам 200-204, показанным на фиг.5, так что для простоты их описание будет опущено. Контроллер 113 проверяет на этапе 306, является ли значение i счета итераций декодирования меньшим, чем ограничивающее число итераций.
Если в результате такого определения значение i счета итераций декодирования оказывается меньшим, чем ограничивающее число итераций, то блок 111 измерения состояния декодирования вычисляет m(i) и Δ(i), пользуясь данными, декодированными декодером 107, на этапе 308. Значения m(i) и Δ(i) вычисляются на основании уравнений (1) и (2), соответственно. После этих вычислений контроллер 113 определяет на этапе 310, является ли значение i счета итераций декодирования равным 0. Если m(i) значение i счета итераций декодирования оказывается равным 0, то m(i) и Δ(i) не требуются, поскольку декодирование является начальным декодированием. Следовательно, в этом случае контроллер 113 переходит к этапу 320. Однако если значение i счета итераций декодирования не является равным 0, то контроллер 113 определяет на этапе 312, является ли значение m(i) большим, чем первое пороговое значение. На этапе 314 контроллер 113 задает ограничивающее число итераций равным его максимальному значению, а затем переходит к этапу 320. Однако, если значение m(i) не является большим, чем первое пороговое значение, то контроллер 113 определяет на этапе 316, является ли значение Δ(i) большим, чем второе пороговое значение. Если в результате такого определения значение Δ(i) оказывается большим, чем второе пороговое значение, контроллер 113 переходит к этапу 318, а в противном случае переходит к этапу 324.
На этапе 318 контроллер 113 задает ограничивающее число итераций равным заданному промежуточному значению. Например, в данном случае минимальное значение может быть задано равным 2 или 3, промежуточное значение может быть задано равным 5, а максимальное значение может быть задано равным 8. После задания ограничивающего числа итераций, контроллер 113 определяет, является ли состояние ЦИК “удовлетворительным”, пользуясь результатами контроля с помощью ЦИК, получаемыми из детектора 109 ЦИК. Если в результате такого определения состояние ЦИК оказывается “удовлетворительным”, то контроллер 113 осуществляет успешный процесс обнаружения скорости передачи данных на этапе 322. То есть, контроллер 113 определяет скорость передачи данных, использовавшуюся во время процесса декодирования на этапе 304, как скорость передачи данных, переданных из передатчика. Однако, если результат контроля с помощью ЦИК не является “удовлетворительным”, то контроллер 113 на этапе 324 определяет, является ли значение i счета итераций декодирования меньшим, чем ограничивающее число итераций.
Если в результате такого определения значение i счета итераций декодирования оказывается меньшим, чем ограничивающее число итераций, то контроллер 113 увеличивает значение i на 1 на этапе 326, а затем возвращается к этапу 304. Однако, если значение i счета итераций декодирования не оказывается меньшим, чем ограничивающее число итераций, то контроллер 113 определяет на этапе 328, является ли значение j счета типов скоростей передачи меньшим, чем число N скоростей передачи данных. Если в результате такого определения значение j счета типов скоростей передачи данных не оказывается меньшим, чем количество N скоростей передачи данных, то контроллер 113 осуществляет процесс отказа от обнаружения скорости передачи данных на этапе 330. Однако, если значение j счета типов скоростей передачи данных оказывается меньшим, чем число N скоростей передачи данных, то контроллер 113 увеличивает значение j счета типов скоростей передачи данных на 1 и задает значение i счета итераций декодирования равным 0 на этапе 332, а затем возвращается к этапу 302.
В отличие от фиг.5, на фиг.8 показано, что если значение m(i) является большим, чем первое пороговое значение, то ограничивающее число итераций задают равным его максимальному значению, а если значение m(i) не является большим, чем первое пороговое значение, и значение Δ(i) является большим, чем второе пороговое значение, то ограничивающее число итераций задают равным его промежуточному значению. То есть, если существует большая вероятность того, что скорость передачи данных можно обнаружить, то ограничивающее число итераций задают равным его максимальному значению, а в противном случае это ограничивающее число итераций задают равным его промежуточному значению, что дает возможность быстрее обнаруживать скорость передачи данных.
Кроме того, в отличие от фиг.5, на фиг.8 показано, что если значение m(i) не является большим, чем первое пороговое значение, и значение Δ(i) не является большим, чем второе пороговое значение, то контроль с помощью ЦИК не проводится. Это происходит потому, что можно учесть существование лишь очень малой вероятности того, что скорость передачи данных будет обнаружена, когда оба значения - значение m(i) и значение Δ(i) - не являются большими, чем их соответствующие пороговые значения. Другая причина заключается в том, что результат контроля с помощью ЦИК может оказаться “удовлетворительным”, даже несмотря на то, что длина кадра входных данных не идентична длине кадра декодера, ввиду серьезного повреждения принимаемого кадра данных. В этом случае может быть обнаружена неправильная скорость передачи данных.
В таблице 1 приведены ограничивающие числа итераций, основанные на m(i) и Δ(i), для первого варианта осуществления, показанного на фиг.5, и для второго варианта осуществления, показанного на фиг.8.
Хотя изобретение проиллюстрировано и описано применительно к предпочтительному варианту его осуществления, специалистам в данной области техники будет понятно, что можно провести различные изменения в форме и деталях в рамках объема притязаний изобретения, определяемого прилагаемой формулой изобретения.
Как описано выше, можно быстро обнаружить скорость передачи данных, воспользовавшись способом обнаружения скорости передачи данных в режиме ОСПВ в соответствии с настоящим изобретением. Кроме того, увеличение скорости обнаружения скорости передачи данных вносит вклад в уменьшение энергопотребления, а уменьшение времени задержки гарантирует быстрое соединение.



Изобретение относится к системам связи. Технический результат заключается в уменьшении времени задержки и энергопотребления при обнаружении скорости передачи турбокодированных данных. Способ декодирования заключается в том, что декодируют данные в кадре с выбранной скоростью передачи данных, вычисляют значение состояния текущего неполного декодирования, осуществляют контроль декодированных данных посредством циклического избыточного кода, определяют выбранную скорость передачи данных. 3 с. и 21 з.п. ф-лы, 8 ил., 1 табл.

где m - значение состояния декодирования, символы “а” и “b” обозначают константы, причем 0≤а<b<ДК, где символ ДК обозначает длину кадра, связанную с выбранной скоростью передачи данных, а символ ОЛП(n) обозначает выходное значение, соответствующее мягкому решению, n-го бита из турбодекодера для данной ДК.

где m - значение состояния декодирования, символы “а” и “b” обозначают константы, причем 0≤а<b<ДК, где символ ДК обозначает длину кадра, связанную с выбранной скоростью передачи данных, а символ ОЛП(n) обозначает выходное значение, соответствующее мягкому решению, n-го бита из турбодекодера для данной ДК.

где m - значение состояния декодирования, символы “а” и “b” обозначают константы, причем 0≤а<b<ДК, где символ ДК обозначает длину кадра, связанную с выбранной скоростью передачи данных, а символ ОЛП(n) обозначает выходное значение, соответствующее мягкому решению, n-го бита из турбодекодера для данной ДК.
| US 5774496 А, 30.06.1998 | |||
| Устройство для изгибания труб | 1934 |
|
SU41314A1 |
| КОНВЕЙЕРНЫЙ ПРИЕМНИК БАЗОВОЙ СТАНЦИИ СОТОВОЙ ЯЧЕЙКИ ДЛЯ УПЛОТНЕНННЫХ СИГНАЛОВ С РАСШИРЕННЫМ СПЕКТРОМ | 1996 |
|
RU2154913C2 |
| WO 9965148, 16.12.1999. | |||

