Предлагаемое изобретение относится к приборостроению и может быть использовано для контроля авиадвигателя, преимущественно газотурбинного (ГТД).
Известна бортовая система контроля авиадвигателя, содержащая датчики топливных параметров ГТД: давления Ртопл и расхода Gтопл топлива, подаваемого в двигатель, выходы которых подключены ко входам блока преобразования параметров двигателя. [Система контроля авиадвигателя. Заявка 2272783, Великобритания, МКИ5 F 02 C 9/46; Rolls-Royce plc., №9224330.2, опубл. 25.05.94].
Недостатком этой системы является слабая эффективность контроля авиадвигателя. Указанный недостаток вызван тем, что для контроля ГТД, во-первых, используется достаточно узкая группа контролируемых параметров авиадвигателя - топливные параметры, во-вторых, тем, что при контроле ГТД не учитываются события превышения контролируемыми параметрами авиадвигателя установленных для них предельных границ.
Этого недостатка лишена известная бортовая система контроля авиадвигателя. [Система контроля авиационного ГТД. Заявка 2262623, Великобритания, МКИ5 F 02 C 9/26; Rolls-Royce plc., №9126781, опубл. 23.06.93].
Известная система содержит помимо датчиков топливных параметров авиадвигателя также и датчики нетопливных параметров: скорости вращения nв и nквд соответственно роторов вентилятора и компрессора высокого давления, температуры газа t
Предельные величины ограничивают допустимые изменения параметров авиадвигателя в штатном режиме его работы. При работе авиадвигателя в нештатном режиме значения отдельных параметров авиадвигателя могут выходить за границы предельных величин, не достигая установленных для этих параметров опасных величин.
Выявление событий выхода текущих значений контролируемых параметров авиадвигателя за границы предельных величин имеет важное значение, так как следствием подобных событий является существенное возрастание износа и увеличение фактической наработки авиадвигателя. Поэтому для оценки реального технического состояния авиадвигателя при его работе в нештатном режиме необходимо учитывать не фактически измеренное время работы (наработку) авиадвигателя, а эффективное время работы (эффективную наработку) авиадвигателя в нештатном режиме, т.е. время, увеличенное по сравнению с измеренным значением. При этом фактическую наработку авиадвигателя, работающего как в штатном, так и в нештатном режимах, следует определять как сумму наработки и эффективной наработки авиадвигателя.
Однако известная система решает задачу определения эффективной наработки весьма приблизительно, т.к. в ее вычислителе текущие значения контролируемых параметров авиадвигателя сравниваются с постоянными значениями предельных величин, хранящихся в памяти модуля предельных величин. При этом в известной системе не учитывается то обстоятельство, что предельные величины сами являются функциями текущих значений параметров авиадвигателя, т.е. не постоянными, а “плавающими” величинами, в связи с чем точное определение реальной наработки авиадвигателя при его работе в нештатном режиме должно основываться на контроле параметров авиадвигателя по плавающим пределам. Однако такой контроль не обеспечивается известной системой.
От указанного недостатка свободна наиболее близкая к предлагаемой и принятая за прототип бортовая система контроля авиационного газотурбинного двигателя ПС-90А [В.А.Пивоваров. Диагностика летательных аппаратов и авиадвигателей. М., МГТУГА, 1995, стр.141-144].
Известная система содержит бортовой вычислитель с процессором, а также блок мультиплексирования, предназначенный для нормализации и мультиплексирования сигналов датчиков контролируемых параметров авиадвигателя, входы которого подключены к выходам датчиков контролируемых параметров авиадвигателя, а выход подключен к параметрическому входу бортового вычислителя с процессором, причем выход бортового вычислителя с процессором предназначен для выдачи информации в бортовую информационную систему.
Известная система обеспечивает контроль технического состояния авиадвигателя при его работе в штатном и нештатном режимах, вычисляет значения эффективной и фактической наработок авиадвигателя и передает их в бортовую информационную систему для регистрации и индикации по вызову.
Недостатком известной системы является необъективная оценка фактической наработки и технического состояния авиадвигателя при его работе на форсированном режиме, таком, например, как режим прерванного взлета двухдвигательного самолета.
Режим прерванного взлета может возникнуть при отказе одного из двигателей взлетающего самолета, оснащенного двумя двигателями. Т.к. прекращение взлета в подобном случае может привести к летному происшествию и запрещается летными нормативными документами, самолет должен продолжить взлет на одном двигателе, работающем на форсированном режиме с повышенной тягой, после чего выполнить предпосадочное маневрирование и затем совершить посадку. Однако, если при работе авиадвигателя на форсированном режиме хотя бы один из контролируемых параметров авиадвигателя выйдет за пределы установленной для этого параметра опасной величины, дальнейшая летная эксплуатация авиадвигателя не допускается.
Для сохранения летной годности авиадвигателя после его работы на форсированном режиме с превышением опасной величины контролируемого параметра и для обеспечения возможности дальнейшего продолжения полетов с использованием упомянутого авиадвигателя летные нормативные документы позволяют рассматривать форсированный режим не как аварийный режим, а как один из разрешенных кратковременных режимов работы авиадвигателя при условии обязательного выполнения нормативных требований по ограничению времени работы авиадвигателя на форсированном режиме, а также по ограничению моторесурса авиадвигателя после его работы с выходом одного или нескольких текущих значений контролируемых параметров за границы опасных величин.
Поэтому для сохранения летной годности авиадвигателя, определения его эффективной наработки на форсированном режиме и остаточного моторесурса контроль технического состояния авиадвигателя при его работе на форсированном режиме должен производиться с обязательным учетом параметрических и временных ограничений, предусмотренных для этого режима летными нормативными документами, что не обеспечивается известной системой и, следовательно, не позволяет использовать авиадвигатель, обеспечивший прерванный взлет самолета, для дальнейшей летной эксплуатации.
Задачей предлагаемого изобретения является обеспечение эффективного бортового контроля, вычисление наработки на форсированном режиме и остаточного моторесурса авиадвигателя, предназначенного для работы на форсированном режиме с повышенной тягой.
Поставленная задача решается тем, что бортовая система контроля авиадвигателя содержит бортовой вычислитель с процессором и блок мультиплексирования, входы которого подключены к выходам датчиков контролируемых параметров авиадвигателя, а выход - к параметрическому входу бортового вычислителя. Новым, согласно изобретению, является то, что в нее дополнительно введен командный блок, в состав которого входят контроллер, модуль предельных уставок и модуль опасных уставок, параметрические входы командного блока подсоединены в выходам части датчиков контролируемых параметров авиадвигателя, контроллер соединен двунаправленной информационной связью с процессором бортового вычислителя, к одному из входов контроллера подсоединен модуль предельных уставок, а к дополнительному - модуль опасных уставок, в состав бортового вычислителя дополнительно введены таймер, модуль предельных алгоритмов и модуль опасных алгоритмов, выход каждого из которых подсоединен к входам процессора, причем в состав модуля опасных алгоритмов входят микропроцессор и подключенные к его входам ячейки опасных алгоритмов: давления газа за створками вентилятора, расхода и давления топлива, тяги, - в состав модуля опасных уставок входят микроконтроллер и подключенные к его входам микромодули опасных уставок: давления газа за створками вентилятора, расхода и давления топлива, тяги, - а бортовой вычислитель снабжен входом для приема сигнала о форсированном режиме авиадвигателя.
При контроле авиадвигателя в командном блоке предлагаемой системы производится сравнение текущих значений опасных параметров с текущими значениями опасных величин, выявляются события выхода опасных параметров за границы опасных величин, формируются соответствующие опасные команды и с учетом наличия этих команд и введенных в таймер значений времени работы авиадвигателя на форсированном режиме в бортовом вычислителе определяются наработка на форсированном режиме и остаточный моторесурс авиадвигателя при его работе на форсированном режиме.
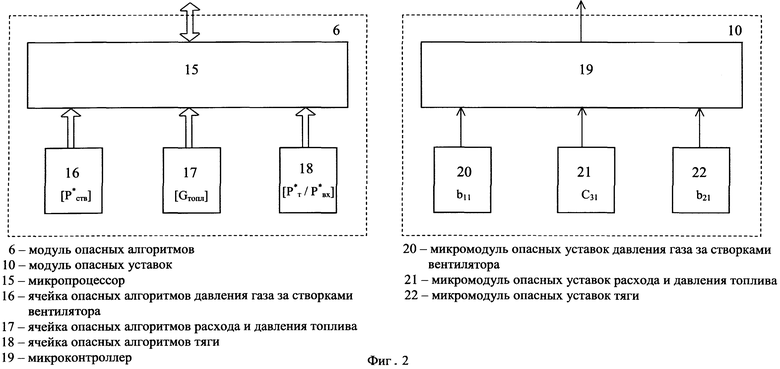
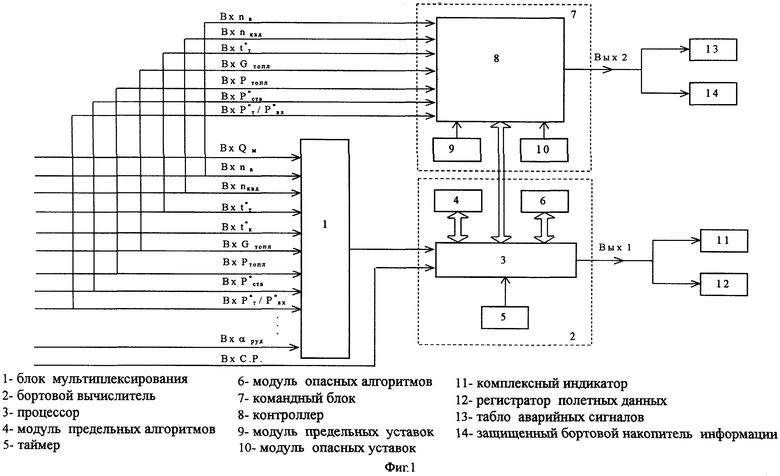
Для более полного раскрытия сущности изобретения на фиг.1 представлена функциональная схема заявленной системы, а на фиг.2 - функциональная схема двух ее модулей.
Бортовая система контроля авиадвигателя содержит блок 1 мультиплексирования, бортовой вычислитель 2, в состав которого входят процессор 3, модуль 4 предельных алгоритмов, таймер 5 и модуль 6 опасных алгоритмов, командный блок 7, в состав которого входят контроллер 8, модуль 9 предельных уставок и модуль 10 опасных уставок.
Бортовая система контроля взаимодействует с бортовой информационной системой, в состав которой входят комплексный индикатор 11 и регистратор 12 полетных данных, а также с системой аварийной информации самолета, в состав которой входят табло 13 аварийных сигналов и защищенный бортовой накопитель 14 информации.
Модуль 6 опасных алгоритмов содержит микропроцессор 15, ячейку 16 опасных алгоритмов давления газа за створками вентилятора, ячейку 17 опасных алгоритмов расхода и давления топлива и ячейку 18 опасных алгоритмов тяги.
Модуль 10 опасных уставок содержит микроконтроллер 19, микромодуль 20 опасных уставок давления газа за створками вентилятора, микромодуль 21 опасных уставок расхода и давления топлива и микромодуль 22 опасных уставок тяги.
В описании изобретения и на фигурах приняты следующие обозначения:
Вх Qм - вход сигнала количества масла;
Вх nв - вход сигнала частоты вращения ротора вентилятора;
Вх nквд - вход сигнала частоты вращения ротора компрессора высокого давления;
Вх t
Вх α руд - вход сигнала положения рукоятки управления двигателем;
Вх Р
Контролируемые параметры:
Qм - количество масла;
nв - частота вращения ротора вентилятора;
nквд - частота вращения ротора компрессора высокого давления;
t
α руд - угол положения рукоятки управления двигателем;
t
t
Gтопл - расход топлива;
Pтопл - давление топлива;
Р
Р
Р
Р
[Р
[Gтопл]min - нижняя граница расхода топлива;
[Р
τ - текущее время;
[τ ] - разрешенное значение времени работы авиадвигателя на форсированном режиме;
nв max(τ ) - предельная величина частоты вращения ротора вентилятора от (τ );
nквд max(τ ) - предельная величина частоты вращения ротора компрессора высокого давления от (τ );
Р
[Р
[Gтопл]min(τ ) - нижняя граница расхода топлива от (τ );
[Р
Входы Вх Qм, Вх nв, Вх nквд, Вх t
Выход блока 1 мультиплексирования соединен с параметрическим входом бортового вычислителя 2, одновременно являющимся первым входом процессора 3, входящего в состав этого вычислителя. Вход Вх Ф.Р. бортового вычислителя 2, предназначенный для приема сигнала “Форсированный режим” (Ф.Р.), подключен ко второму входу процессора 3; третий вход процессора 3 соединен с выходом таймера 5. Модуль 4 предельных алгоритмов и модуль 6 опасных алгоритмов бортового вычислителя 2 соединены каждый с процессором 3 соответственно первой и второй двунаправленными шинами. Бортовой вычислитель 2 соединен с командным блоком 7 третьей двунаправленной шиной, связывающей процессор 3 бортового вычислителя 2 с контроллером 8 командного блока 7.
Выход Вых 1 бортового вычислителя 2, одновременно являющийся выходом процессора 3, предназначен для выдачи информации во взаимодействующую бортовую информационную систему. Шинные входы микропроцессора 15, входящего в состав модуля 6 опасных алгоритмов бортового вычислителя 2, соединены каждый с шинным выходом одной из ячеек 16, 17, 18 опасных алгоритмов.
Параметрические входы Вх nв, Вх nквд, Вх t
Параметрические входы командного блока 7 одновременно являются параметрическими входами контроллера 8, входящего в состав этого блока. Остальные однонаправленные входы контроллера 8 подключены один - к выходу модуля 9 предельных уставок, другой - к выходу модуля 10 опасных уставок.
Выход Вых 2 командного блока 7, одновременно служащий выходом контроллера 8, предназначен для выдачи информации в систему аварийной информации самолета.
Входы микроконтроллера 19, входящего в состав модуля 10 опасных уставок командного блока 7, подсоединены каждый к выходу одного из микромодулей 20, 21, 22 опасных уставок.
При подготовке бортовой системы контроля к работе предварительно анализируются технические параметры авиадвигателя, обычно используемые для контроля его технического состояния в различных режимах работы, предусмотренных регламентом летной эксплуатации: штатном, нештатном и форсированном режимах, и формируется перечень минимально возможного числа контролируемых параметров, необходимого и достаточного для эффективного контроля авиадвигателя во всех перечисленных режимах:

Для контролируемых параметров (1) авиадвигателя устанавливается список предельных величин, а из него выделяется список опасных величин. Кроме того, для форсированного режима (Ф.Р.) устанавливается также список значений времени работы на форсированном режиме Ф.Р.:

где
Δ τ 1, Δ τ 2 - уставки времени, а именно:
Δ τ 1 - значение времени задержки информации на режиме Ф.Р.;
Δ τ 2 - значение времени продления выдачи информации на режиме Ф.Р.;
[τ ] - разрешенное значение времени работы авиадвигателя на режиме Ф.Р.;
[Тназн] - назначенный моторесурс авиадвигателя.
Из параметров перечня (1) выделяются предельные параметры:

текущее значение каждого из которых может выходить за границы текущего значения соответствующей ему предельной величины, но не выходит за границы текущего значения опасной величины, а из предельных параметров, в свою очередь, выделяются опасные параметры:

текущее значение каждого из которых может выходить за границы текущего значения соответствующей ему опасной величины.
При неработающем авиадвигателе в память таймера 5 бортового вычислителя 2 вводятся значения времени (2), а в память модуля 4 предельных алгоритмов бортового вычислителя 2 - математические выражения предельных алгоритмов, предназначенных для вычисления текущих значений предельных величин, ограничивающих сверху или снизу предельно-допустимые изменения текущих значений контролируемых параметров авиадвигателя.
Выражения для предельных величин:

представляют собой многочлены двух видов, зависящие от режима работы авиадвигателя и от текущих значений контролируемых параметров. Многочлены первого вида являются нелинейными двучленами типа

где
в качестве параметров x и y выбираются параметры из вышеуказанного перечня "Контролируемые параметры";
i - порядковый номер многочлена 1-го вида;
zi max - текущее значение предельной величины в функции параметров x, y авиадвигателя;
аi1 - размерный коэффициент;
fi1(x) и fi2(y) - экспериментальные зависимости функций fi1 и fi2 a от текущих значений контролируемых параметров x и y авиадвигателя в нештатном режиме его работы;
Сi1 - аддитивная постоянная (параметрическая уставка), характеризующая нештатный режим работы авиадвигателя.
Многочлены второго вида являются линейными трехчленами типа

где
j - порядковый номер многочлена 2-го вида;
Zj min - текущее значение предельной величины в функции параметров x, y авиадвигателя;
aj1, aj2 - размерные коэффициенты;
x и y - текущие значения контролируемых параметров авиадвигателя (см. выше);
bj1, bj2 - аддитивные постоянные, уточняющие вид выражения (7) в нештатном режиме работы авиадвигателя;
Cj1 - аддитивная постоянная (параметрическая уставка), характеризующая нештатный режим работы авиадвигателя.
В память ячеек 16, 17, 18 опасных алгоритмов и микроконтроллера 19 модуля 6 опасных алгоритмов бортового вычислителя 2 вводятся математические выражения опасных алгоритмов, предназначенных для вычисления текущих значений опасных величин, ограничивающих сверху или снизу опасные изменения текущих значений опасных параметров (4) авиадвигателя.
Выражения для опасных величин:

также представляют собой нелинейные и линейные многочлены.
В память ячейки 16 опасных алгоритмов модуля 6 опасных алгоритмов бортового вычислителя 2 вводится выражение для вычисления нижней границы опасного давления [Р

где k11 и k12 - размерные коэффициенты;
t
Р
В память ячейки 18 опасных алгоритмов модуля 6 опасных алгоритмов бортового вычислителя 2 вводится выражение для вычисления нижней границы опасного отношения давлений [Р

где b21, b22 и b23 - аддитивные постоянные (параметрические уставки);
α руд - угол положения рукоятки управления двигателем;
t
k21 и k22 - размерные коэффициенты,
причем значения размерных коэффициентов k21 и k22 устанавливают по результатам стендовых испытаний авиадвигателя на форсированном режиме в зависимости от соотношения величин α руд и t
k21=k22=0 при  , α руд≥73° ;
, α руд≥73° ;
k21=0,01; k22=0 при  , 55° ≤ α руд<73° .
, 55° ≤ α руд<73° .
Для расчета эффективной Тэфф наработки авиадвигателя в нештатном режиме используется сумма вида
где 
- частная эффективная наработка авиадвигателя;
m - целое число, равное количеству частных подрежимов нештатного режима авиадвигателя, отличающихся между собой наименованиями или числом контролируемых параметров, вышедших за границы предельных величин;
τ 1j, τ 2j - соответственно время начала и время конца работы авиадвигателя в частном j-ом подрежиме;
bi - постоянная, характеризующая влияние на частную эффективную наработку Тэфф m события, заключающегося в выходе i-го параметра авиадвигателя за границы предельной величины;
n - число событий выхода, характеризующее частный подрежим работы авиадвигателя.
Для расчета наработки на форсированном режиме авиадвигателя Тфор используется выражение типа (12), в котором вместо величины Тэфф m берется величина Тфор m, причем

где аi - коэффициент, характеризующий степень ужесточения частного нештатного подрежима авиадвигателя при переходе на форсированный режим.
Таким образом,
Фактическая наработка Тфакт авиадвигателя находится как сумма наработки Т, эффективной наработки Тэфф и наработки на форсированном режиме Тфор авиадвигателя:

а остаточный моторесурс [Т] авиадвигателя определяется как разность назначенного моторесурса [Тназн] и фактической наработки:

В память модуля предельных уставок 9 командного блока 7 вводятся численные значения параметрических уставок Сin, Cjm, необходимых для вычисления предельных величин в соответствии с выражениями (6) и (7), а в память модуля 10 опасных уставок - численные значения параметрических уставок, необходимых для вычисления опасных величин; при этом уставка b11 вводится в память микромодуля 20 опасных уставок, а уставка b21 - в память микромодуля 22 опасных уставок тяги.
Введенные в память модуля 9 предельных уставок и модуля 10 опасных уставок значения уставок передаются в контроллер 8 и далее транслируются через третью двунаправленную шину в процессор 3 бортового вычислителя 2. В процессоре 3 бортового вычислителя 2 вычисляются текущие значения предельных величин:

и текущие значения опасных величин:

где τ - текущее время,
и ретранслируются по третьей двунаправленной шине в контроллер 8 командного блока 7.
При работающем авиадвигателе на входы блока 1 мультиплексирования поступают сигналы о текущих значениях контролируемых параметров (1) авиадвигателя, сформированные соответствующими датчиками; в блоке 1 мультиплексирования эти сигналы нормализуются, мультиплексируются, передаются на параметрический вход бортового вычислителя 2 и далее - на первый вход процессора 3.
В процессоре 3 на основе математических выражений (6), (7), которые поступают в процессор 3 по первой двунаправленной шине из модуля 4 предельных алгоритмов, с использованием значений предельных уставок, которые поступают в процессор 3 из модуля 9 предельных уставок через контроллер 8 по третьей двунаправленной шине, вычисляются текущие значения (17) предельных величин и по третьей двунаправленной шине передаются из процессора 3 бортового вычислителя 2 в контроллер 8 командного блока 7. Кроме того, в процессоре 3 на основе математических выражений, поступающих в процессор 3 по второй двунаправленной шине из модуля 6 опасных алгоритмов, с использованием значений опасных уставок, поступающих в процессор 3 из модуля 10 опасных уставок через контроллер 8 по третьей двунаправленной шине, вычисляются текущие значения (18) опасных величин и по третьей двунаправленной шине передаются из процессора 3 бортового вычислителя 2 в контроллер 8 командного блока 7.
Сигналы о текущих значениях предельных (3) и опасных (4) параметров авиадвигателя поступают с выходов соответствующих датчиков непосредственно на входы командного блока 7 и далее - на параметрические входы контроллера 8, в котором, с учетом получаемой из процессора 3 бортового вычислителя 2 информации о текущих значениях предельных и опасных величин, сравниваются текущие значения предельных (3) и опасных (4) параметров соответственно с текущими значениями предельных (17) и опасных (18) величин с целью выявления событий выхода текущих значений указанных параметров за границы текущих значений упомянутых величин и формирования предельных и опасных команд.
При работе авиадвигателя в штатном режиме, характеризующемся отсутствием событий выхода контролируемых параметров авиадвигателя за границы предельных и опасных величин, в бортовом вычислителе 2 определяется значение наработки Т авиадвигателя в штатном режиме как измеренное время работы авиадвигателя в этом режиме и с выхода Вых 1 бортового вычислителя 2 значение Т передается во взаимодействующую бортовую информационную систему.
При работе авиадвигателя в нештатном режиме, в случае возникновения событий выхода контролируемых параметров авиадвигателя за границы предельных величин и отсутствия событий выхода контролируемых параметров авиадвигателя за границы опасных величин, в контроллере 8 командного блока 7 формируются предельные команды и передаются с выхода Вых 2 командного блока 7 в систему аварийной информации самолета, а также по третьей двунаправленной шине - в процессор 3 бортового вычислителя 2. В бортовом вычислителе 2 с учетом наличия предельных команд вычисляется в соответствии с выражениями (12) и (11) значение эффективной Тэфф и в соответствии с выражением (15) - значение фактической Тфакт наработок авиадвигателя; вычисленные значения передаются с выхода Вых 1 бортового вычислителя 2 в бортовую информационную систему.
При работе авиадвигателя на форсированном режиме, характеризующемся наличием событий выхода текущих значений опасных параметров за установленные границы, в бортовой вычислитель 2 через его вход Вх Ф.Р. и далее - на второй вход процессора 3 в момент времени τ 1 поступает сигнал о переходе авиадвигателя на форсированный режим и по третьей двунаправленной шине транслируется в контроллер 8 командного блока 7. Из таймера 5 на третий вход процессора 3 передаются значения уставок времени Δ τ 1 и Δ τ 2, транслируются по третьей двунаправленной шине в контроллер 8 командного блока 7 и, при наличии событий выхода текущих значений опасных параметров (4) за границы текущих значений опасных величин (18), в командном блоке 7 формируются опасные команды. С учетом уставок времени Δ τ 1 и Δ τ 2 выдача сформированных команд задерживается на время Δ τ 1 задержки выдачи информации с момента τ 1 приема сигнала Ф.Р.; по истечении времени Δ τ 1 задержки опасные команды с выхода Вых 2 командного блока 7 передаются в систему аварийной информации самолета для регистрации и оповещения экипажа, а также по третьей двунаправленной шине - в процессор 3 бортового вычислителя 2, причем передача опасных команд продолжается в течение времени Δ τ 2 продления информации с момента τ 2 прекращения сигнала Ф.Р., т.е. вплоть до момента времени τ 2+Δ τ 2.
Задержка на время Δ τ 1 и продление на время Δ τ 2 выдачи опасных команд производятся в связи с особой ответственностью этих команд для исключения возможности использования ложной информации о форсированном режиме авиадвигателя. С этой целью в течение времени Δ τ 1 проверяется устойчивость наличия сигнала Ф.Р., а в течение времени Δ τ 2 - устойчивость снятия сигнала Ф.Р. для выявления случайных выбросов или сбоев этого сигнала.
В бортовом вычислителе 2 с использованием опасных команд вычисляется в соответствии с выражениями (13), (14) наработка на форсированном режиме Тфор и, в соответствии с выражением (15), фактическая Тфакт наработка авиадвигателя, определяется время τ ф.р.=τ 2-τ 1 работы авиадвигателя на форсированном режиме, вычисляется в соответствии с выражением (16) с использованием значения [Тназн], поступающего из таймера 5 на третий вход процессора 3, величина остаточного моторесурса [Т] авиадвигателя с учетом фактической наработки Тфакт. Вычисленные данные передаются с выхода Вых 1 бортового вычислителя 2 в бортовую информационную систему.
Кроме того, в процессоре 3 бортового вычислителя 2 с использованием разрешенного значения времени [τ ], поступающего из таймера 5 на третий вход процессора 3, сравнивается время τ ф.р. работы авиадвигателя на форсированном режиме с разрешенным значением времени [τ ] и, в случае превышения последнего τ ф.р.>[τ ], формируется команда превышения. Сформированная команда передается по третьей двунаправленной шине в контроллер 8 командного блока 7 и с выхода Вых 2 этого блока подается в систему аварийной информации самолета для регистрации и оповещения экипажа.
Таким образом, предложенная система позволяет повысить эффективность бортового контроля авиадвигателя на форсированном режиме и использовать авиадвигатель после его работы на форсированном режиме для дальнейшей летной эксплуатации с ограниченным моторесурсом.
Изобретение относится к авиаприборостроению и может быть использовано для бортового контроля авиадвигателя, преимущественно газотурбинного. Бортовая система контроля авиадвигателя позволяет контролировать техническое состояние авиадвигателя в штатном, нештатном и форсированном режимах его работы. Для проведения контроля используется информация, поступающая от датчиков контролируемых параметров авиадвигателя на входы блока мультиплексирования и с выхода этого блока - в бортовой вычислитель. Информация, поступающая от датчиков особо ответственных параметров авиадвигателя, подается непосредственно на вход командного блока. В бортовом вычислителе и в командном блоке на основе введенных в их память вычислительных алгоритмов и поступающей от датчиков информации о значениях опасных параметров авиадвигателя: давления газа за створками вентилятора, расхода и давления топлива и тяги сравниваются измеренные текущие значения сигналов датчиков с вычисленными текущими значениями предельных и опасных величин и в случае выхода значений сигналов за установленные границы предельных и опасных величин формируются предельные и опасные команды и передаются в бортовой вычислитель и в систему аварийной информации самолета для регистрации и оповещения экипажа. В бортовом вычислителе с учетом полученных команд определяются значения фактической наработки и остаточного моторесурса авиадвигателя и передаются в бортовую информационную систему для индикации и регистрации. Такое выполнение системы позволит обеспечить эффективный бортовой контроль, вычисление наработки на форсированном режиме и остаточного моторесурса авиадвигателя, предназначенного для работы на форсированном режиме с повышенной тягой. 2 ил.
Бортовая система контроля авиадвигателя, содержащая бортовой вычислитель с процессором, а также блок мультиплексирования, входы которого подключены к выходам датчиков контролируемых параметров авиадвигателя, а выход - к параметрическому входу бортового вычислителя, отличающаяся тем, что дополнительно введен командный блок, содержащий контроллер, модуль предельных уставок и модуль опасных уставок, параметрические входы командного блока подсоединены к выходам части датчиков контролируемых параметров авиадвигателя, контроллер соединен двунаправленной информационной связью с процессором бортового вычислителя, к одному из входов контроллера подсоединен модуль предельных уставок, а к дополнительному - модуль опасных уставок, в состав бортового вычислителя дополнительно введены таймер, модуль предельных алгоритмов и модуль опасных алгоритмов, выход каждого из которых подсоединен к входам процессора, причем в состав модуля опасных алгоритмов входят микропроцессор и подключенные к его входам ячейки опасных алгоритмов: давления газа за створками вентилятора, расхода и давления топлива, тяги, в состав модуля опасных уставок входят микроконтроллер и подключенные к его входам микромодули опасных уставок: давления газа за створками вентилятора, расхода и давления топлива, тяги, а бортовой вычислитель снабжен входом для приема сигнала о форсированном режиме авиадвигателя.
| ПИВОВАРОВ В.А | |||
| Диагностика летательных аппаратов и авиадвигателей, Москва, МГТУГА, 1995, с.141-144 | |||
| СПОСОБ ПОЛУЧЕНИЯ ИЗОТОПНО-ОБОГАЩЕННОГО ОКСИДА ТЕЛЛУРА (IV) | 2004 |
|
RU2272783C1 |
| ЭЛЕКТРОМАГНИТНАЯ ГИДРАВЛИЧЕСКАЯ ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 2004 |
|
RU2262623C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ АВИАЦИОННОГО ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1990 |
|
RU2023897C1 |
| Способ многопараметрового контроля газотурбинного двигателя | 1976 |
|
SU714032A1 |
| ПО Г-СО ЮЗ НА Я | 0 |
|
SU306064A1 |
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |
| US 6568166 B2, 27.03.2003. | |||

