Изобретение относится к средствам управления движением морских и речных судов и может быть использовано для целей навигации. Известны устройства, обеспечивающие измерения относительной скорости перемещения электропроводящей жидкости, которые могут быть использованы для определения скорости движения судна [А.с. СССР №396626, МПК G 01 P 5/08, опубликовано 29.08.1973 г.; а.с. СССР №266287, МПК G 01 N, опубликовано 17.03.1970 г.). Однако в силу своих конструктивных особенностей, низкой точности и достоверности измерений их использование для указанной цели возможно с большими ограничениями.
В качестве прототипа принято устройство “Лаг индукционный электронный ИЭЛ-2М (КБ1.152.340ТУ)”, содержащий индукционный первичный преобразователь скорости с измерительным шунтом, усилителями опорного и измерительного канала, синхронный детектор, аналого-цифровой преобразователь, генератор опорной частоты, блок управления, фильтр, корректор, устройство индикации скорости и блок выработки пройденного расстояния. С помощью двух электродов, находящихся в движущемся потоке, с объема жидкости, охваченного магнитным полем, снимается напряжение, значение которого прямо пропорционально скорости потока. Сигналы датчика обрабатываются и преобразуются в относительную скорость и пройденное расстояние счетно-решающей схемой лага.
Недостаток прототипа заключается в ограничениях при применении, связанных с тем, что показания лага зависят от электросопротивления водной среды (уровня содержания солей), в которой перемещается судно, при этом необходимо знать уровень солености воды и знать тарировочные коэффициенты для ручной корректировки либо каждый раз проводить метрологические испытания по скорости и учитывать поправки посредством корректора. Кроме того, в прототипе для питания первичного измерительного преобразователя используется корабельная бортсеть, что существенно понижает помехозащищенность и точность измерений. Следует отметить такие недостатки прототипа, как измерение скорости только в одном направлении (вперед), отсутствие возможности измерения скорости в поперечном направлении.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности и достоверности результатов измерений относительной скорости судна.
Поставленная задача решается устройством измерения относительной скорости судна, содержащим индукционный первичный преобразователь продольной скорости, шунт продольного канала, усилитель измерительный продольного канала, усилитель опорного продольного канала, синхронный детектор продольного канала, аналого-цифровой преобразователь, фильтр, устройство индикации скорости, блок выработки пройденного расстояния, корректор, блок управления, генератор опорных частот, причем выход индукционный первичного преобразователя продольной скорости соединен с входом усилителя измерительного продольного канала, выход которого подключен ко входу синхронного детектора продольного канала, выход которого подключен к первому входу аналого-цифрового преобразователя, ко второму входу которого также подключен первый выход блока управления, второй выход которого подключен к первому входу фильтра, выход которого подан на первый вход устройства индикации скорости, первый выход которого соединен со входом блока выработки пройденного расстояния, а второй - с первым входом корректора, выход которого соединен со вторым входом устройства индикации скорости, а второй вход корректора соединен с первым выходом генератора опорных частот, второй выход которого подан на первый вход блока управления, вход индукционного первичного преобразователя продольной скорости соединен с первым выходом шунта продольного канала, второй выход которого соединен с входом усилителя опорного продольного канала, первый выход аналого-цифрового преобразователя соединен со вторым входом фильтра. Заявляемое устройство в отличие от прототипа дополнительно содержит генератор возбуждения, аналоговый переключатель, фазовращатель, детектор, причем выход генератора возбуждения подключен к входу шунта продольного канала, а вход генератора возбуждения соединен с третьим выходом генератора опорных частот, выход усилителя опорного продольного канала соединен с первым входом переключателя и со входами фазовращателя и детектора, выход которого подан на третий вход аналого-цифрового преобразователя, второй вход переключателя соединен с выходом фазовращателя, третий - с третьим выходом блока управления, а выход переключателя со вторым входом синхронного детектора продольного канала, второй выход аналого-цифрового преобразователя соединен со вторым входом блока управления.
В случае необходимости измерения еще и поперечной скорости судна устройство может содержать дополнительно индукционный преобразователь поперечной скорости, шунт поперечного канала, усилитель измерительного поперечного канала, усилитель опорного поперечного канала, синхронный детектор поперечного канала, причем вход шунта поперечного канала соединен с выходом генератора возбуждения, а первый выход шунта поперечного канала подключен к входу индукционного преобразователя поперечной скорости, выход которого соединен через усилитель измерительный поперечного канала с первым входом синхронного детектора поперечного канала, выход которого соединен с четвертым входом аналого-цифрового преобразователя, а второй вход - через усилитель опорного поперечного канала со вторым выходом шунта поперечного канала.
При перемещении судна как вперед-назад, так и вправо-влево скорость индицируется с учетом этого направления (+ или -) за счет того, что синхронные детекторы продольного и поперечного каналов выполнены таким образом, что полярность выходного постоянного напряжения зависит от направления перемещения судна.
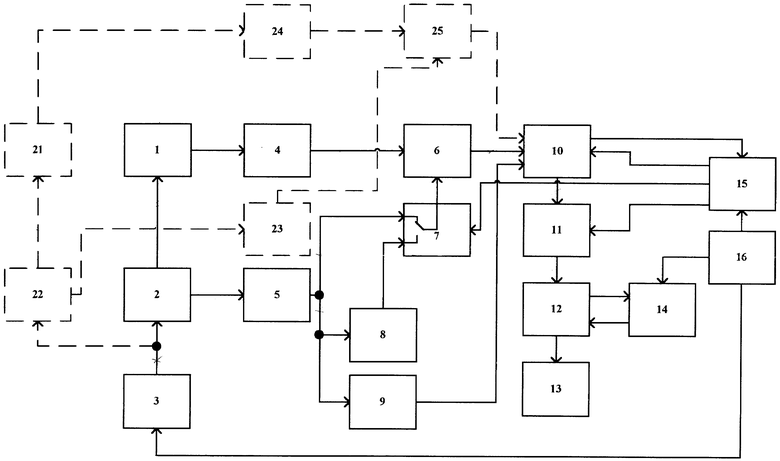
Структурная схема устройства измерения относительной скорости судна (в дальнейшем - лага) представлена на чертеже (пунктирными линиями показаны блоки и их связи, обеспечивающие измерение поперечной относительной скорости судна) и содержит: индукционный первичный преобразователь продольной скорости - 1, шунт продольного канала - 2, генератор возбуждения - 3, усилитель измерительного продольного канала - 4, усилитель опорного продольного канала - 5, синхронный детектор продольного канала - 6, аналоговый переключатель - 7, фазовращатель - 8, детектор - 9, аналого-цифровой преобразователь - 10, фильтр - 11, устройство индикации скорости - 12, блок выработки пройденного расстояния - 13, корректор - 14, блок управления - 15, генератор опорной частоты - 16, а также (показано пунктиром) измерительный преобразователь поперечной скорости - 21, шунт поперечного канала - 22, усилитель измерительный поперечного канала - 24), усилитель опорного поперечного канала - 23, синхронный детектор поперечного канала - 25.
Лаг работает следующим образом.
Преобразователь 1 состоит из электромагнита, питаемого напряжением переменного тока от блока 3 через узел 2. Магнитное поле, создаваемое электромагнитом, пересекает некоторый объем движущегося под днищем судна потока воды. В результате в движущейся воде, которая благодаря содержанию солей является электропроводной, возникает ЭДС. С помощью 2-х электродов, расположенных в преобразователе 1 и находящихся в потоке воды, с объема жидкости, охваченного магнитным полем, снимается напряжение, величина которого прямо пропорциональна скорости потока при известных величине индукции поля и расстояния между электродами.
С целью исключения поляризации электродов электромагнит питается напряжением переменного тока частотой ωt, а это в свою очередь приводит к возникновению на электродах преобразователя 1 трансформаторной ЭДС, сдвинутой относительно полезного сигнала на 90° (квадратурный сигнал).
Следовательно, суммарное напряжение Uc, снимаемое с электродов преобразователя 1:
Uс=KПK1VnHSinωt+K2КПCosωt,
где Vn - относительная скорость перемещения воды по продольной оси судна;
К1 и К2 - коэффициенты, зависящие от конструктивных параметров;
Н - напряженность магнитного поля вблизи электродов;
КП - коэффициент, определяемый электропроводностью потока.
Первое слагаемое приведенной формулы
KПK1VnHSinωt=UvSinωt - является составляющей сигнала, определяемой скоростью движения судна относительно воды (Uν - амплитуда сигнала).
Напряжение с измерительных электродов усиливается блоком 4 и подается на один из входов блока 6, на второй вход которого через переключатель 7 подается опорное напряжение синфазное Uν. Формирование опорного напряжения обеспечивает последовательно включенный измерительный резистор 2, усиленное напряжение с которого через блок 5 подается на вход управления блока 6. Синхронный детектор 6 преобразует переменное напряжение UνSinωt в постоянное, пропорциональное величине Uν, и одновременно эффективно подавляет квадратурный сигнал. Полярность выходного сигнала зависит от направления движения.
Выходной аналоговый сигнал 6 подается на вход АЦП 10, где он преобразуется в дискретную форму, далее фильтруется фильтром 11, отображается в цифровом виде блоком 12. Используя выходной сигнал блока 12, блок 13 исчисляет и показывает пройденный судном путь. Блок 15 обеспечивает управление работой узлов и блоков лага, а генератор 16 его синхронизацию. Корректор 14 призван обеспечить коррекцию нелинейных искажений сигнала из-за влияния гидродинамических условий в месте размещения преобразователя 1. Данная характеристика снимается, как правило, однократно при тарировке лага после установки на судне.
Для целей периодической (или по запросу) корректировки показаний лага в зависимости от солености (электропроводности) воды подключают фазовращатель 8 посредством переключателя 7 ко второму входу детектора 6. При этом фазовращатель 8 обеспечивает опорный сигнал, синфазный квадратурному сигналу K2KПHCosωt=KПUkcosωt и противофазный UvSinωt.
На выходе детектора 6 получаем сигнал постоянного тока, пропорциональный квадратурному сигналу, т.е. электропроводности воды, сигнал UνSinωt, пропорциональный скорости, полностью подавляется. Квадратурный сигнал преобразуется в дискретную форму и подается в блок управления, который проводит его оценку и корректирует при необходимости коэффициент преобразования АЦП 10 для компенсации изменения параметров среды (например, изменением коэффициента деления входного делителя, управляемого напряжением).
Детектор 9 непрерывно выдает напряжение постоянного тока, пропорциональное среднему значению тока питания преобразователя 1. Выходное напряжение детектора изменяет коэффициент преобразования АЦП 10 таким образом, чтобы компенсировать изменения тока возбуждения и соответственно напряженность поля Н. Напряжение возбуждения преобразователя 1 формируется в отличие от прототипа отдельным блоком 3, что позволяет, во-первых, выбором частоты генератора минимизировать влияние помех бортовой сети на полезный сигнал, во-вторых, повысить качество и стабильность напряжения возбуждения, тем самым повысить точность измерений.
Измерение скорости по поперечной оси судна происходит аналогичным образом. Индикация поперечной скорости может осуществляться в зависимости от технической реализации блоком 12 одновременно или попеременно с продольной. Кроме того, при наличии соответствующего вычислителя в блоке 12 возможно определение полной относительной скорости судна: 
Таким образом, предложенное изобретение позволяет повысить точность и достоверность результатов измерения относительной скорости судна за счет автоматизации учета влияния солености (электросопротивления) воды, улучшения схемного построения устройства, расширения его функциональных возможностей за счет измерения как продольной, так и поперечной скоростей в обоих направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАГОННЫЕ ВЕСЫ ШИС | 1994 |
|
RU2082112C1 |
| ТРАССОПОИСКОВЫЙ ПРИЕМНИК | 2011 |
|
RU2482517C1 |
| ЦИФРОВОЙ ИНДУКЦИОННЫЙ ФЕРРОМЕТР ДЛЯ РЕГИСТРАЦИИ ПЕТЕЛЬ ГИСТЕРЕЗИСА ТОНКИХ ФЕРРОМАГНИТНЫХ ПЛЕНОК | 2023 |
|
RU2811351C1 |
| ВИХРЕТОКОВОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОВЕРХНОСТНЫХ И ПОДПОВЕРХНОСТНЫХ ТРЕЩИН В ДЕТАЛЯХ ИЗ ТОКОПРОВОДЯЩИХ МАТЕРИАЛОВ | 2006 |
|
RU2312333C1 |
| Магнитометр | 1980 |
|
SU935839A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЗОНАНСНЫХ ЧАСТОТ | 1992 |
|
RU2049329C1 |
| Измерительный преобразователь на несущей частоте | 2022 |
|
RU2794248C1 |
| Устройство для бесконтактного измерениягЕОМЕТРичЕСКиХ пАРАМЕТРОВ пОВЕРХНОСТЕй | 1978 |
|
SU838323A1 |
| МЕТАЛЛОИСКАТЕЛЬ | 2006 |
|
RU2366982C2 |
| Фурье-спектрометр | 1988 |
|
SU1681171A1 |
Изобретение относится к навигации, в частности к средствам управления движением морских и речных судов. Устройство содержит индукционный первичный преобразователь продольной скорости, шунт продольного канала, усилитель измерительный продольного канала, усилитель опорного продольного канала, синхронный детектор продольного канала, аналого-цифровой преобразователь, фильтр, устройство индикации скорости, блок выработки пройденного расстояния, корректор, блок управления, генератор опорных частот, генератор возбуждения. Для периодической корректировки показаний устройства в зависимости от солености воды к детектору подключают фазовращатель, который формирует измерительный сигнал, пропорциональный электропроводности воды. Техническим результатом является повышение точности и достоверности результатов измерений относительной скорости судна. 2 з.п. ф-лы, 1 ил.
| БЛИНОВ И.А | |||
| и др | |||
| Эксплуатация электронавигационных приборов на морских судах | |||
| М., “Транспорт”; 1976, с.195-208 | |||
| Двухмерный индукционный лаг | 1976 |
|
SU717658A1 |
| Индукционный лаг | 1977 |
|
SU744329A1 |
| US 6426918 В1, 30.07.2002 | |||
| РЕАГЕНТ ДЛЯ ИНВЕРТНЫХ ЭМУЛЬСИОННЫХ РАСТВОРОВ | 2001 |
|
RU2200753C1 |

