Изобретение относится к способу обнаружения аварийных электрических дуг в кабеле, в частности в кабеле бортовой сети воздушного или космического летательного аппарата. Оно относится также к устройству для осуществления способа. Под аварийной электрической дугой понимают при этом, в частности, так называемый Arc Tracking.
Проблема так называемого "Cable Arc Tracking" уже давно известна, в частности, в бортовых сетях воздушных и/или космических летательных аппаратов. При этом Arc Tracking в кабельном пучке между двумя проходящими рядом друг с другом кабелями из-за, например, более ранних повреждений и/или загрязнений (Wet Arc Tracking) или за счет трения по металлической кромке (Dry Arc Tracking) возникает проводящее соединение. Это соединение может быть сначала высокоомным (Wet Arc Tracking) или непосредственно низкоомным (Dry Arc Tracking). Wet Arc Tracking обозначает при этом созданное электролитом, например чистящей жидкостью, и воздействующее на изоляцию кабеля проводящее соединение между двумя повреждениями изоляции. Следствием при образовании электрической дуги является зачастую тепловое разрушение всего кабельного пучка на определенной длине. В противоположность этому при Dry Arc Tracking металлический проводник создает относительно низкоомное проводящее соединение, и дуга возникает практически сразу же. Также и это может привести к тепловому разрушению кабельного пучка.
Проблемой при этом является не только разрушение самого кабельного пучка. Критическими являются вытекающие из этого последующие разрушения, возникающие в результате загорания окружающего материала. Вытекающие из подобных загораний кабелей также взрывоподобные последующие повреждения могут, в свою очередь, стать причиной катастрофы воздушного или космического летательного аппарата.
При изучении причин возникновения аварийных электрических дуг или Arc Tracking в кабелях подобных бортовых сетей удалось доказать, что, с одной стороны, сопротивляемость изоляций кабелей к Arc Tracking зависит исключительно от конструкции применяемых в оболочке кабелей материалов. С другой стороны, применявшийся до сих пор материал полиимид отличается очень высоким водопоглощением, что способствует предварительному разрушению из-за трещинообразования в изоляции, особенно при частых сменах температур, возникающих в режиме полета. Кроме того, при тепловом разрушении, начиная примерно с 800°С, образуется карбонизирующий налет, способствующий возникновению, т.е. перемещению дуги вдоль кабельной разделки. В противоположность этому такие материалы, как политетрафторэтилен (ПТФЭ), обладают относительной сопротивляемостью к Arc Tracking.
Поскольку у применяемых в воздухоплавании типов кабелей изоляция состоит из полиимидной пленки, целью всех предпринятых в этой области усилий является разработка тестов, позволяющих как можно более однозначно классифицировать кабели по их сопротивляемости к Arc Tracking. При этом полиимид в качестве составной части оболочек кабелей из-за своих прекрасных диэлектрических показателей и своей высокой температурной прочности до сих пор не заменялся. Однако, несмотря на оптимизацию процессов и максимальную тщательность при изготовлении и прокладке кабельных пучков, не удавалось полностью предотвратить аварии из-за Cable Arc Tracking. К тому же было обнаружено, что в штепсельных соединителях под влиянием влаги и из-за загрязнения могут возникать пробои, которые в самом неблагоприятном случае приводят к воспламенению соседних деталей.
При установке защитных аппаратов еще более затрудняющим обстоятельством является то, что амплитуда тока, протекающего в процессе Arc Tracking, в частности при Wet Arc Tracking, может лежать заметно ниже номинального тока обычно установленных аппаратов защиты от тока перегрузки, вследствие чего они не срабатывают. В противоположность этому амплитудные значения при Dry Arc Tracking, как известно, выше. Они возникают, однако, обычно периодически, так что преобразованной энергии зачастую недостаточно для срабатывания установленных аппаратов защиты.
Для решения описанной проблемы поэтому желательно предусмотреть в дополнение к уже имеющейся традиционной защите от тока перегрузки в бортовой сети подобного летательного аппарата защиту от аварийных электрических дуг, с тем чтобы максимально надежно защитить имеющееся бортовое оборудование.
В основе изобретения лежит поэтому задача разработки особенно подходящего способа обнаружения аварийных электрических дуг в кабеле, в частности кабеле бортовой сети воздушного или космического летательного аппарата. Кроме того, должно быть создано пригодное для осуществления способа устройство, которое простым и, в частности, компактным образом обеспечивало бы особенно надежную защиту кабеля или кабельного пучка и/или питаемого через него потребителя также от аварийных электрических дуг (Arc Tracking).
В отношении способа эта задача решается согласно изобретению посредством признаков п.1 формулы. Предпочтительные усовершенствования являются предметом подчиненных ему зависимых пунктов.
Для этой цели полученный сигнал переменного тока снимают дискретно по времени и посредством интерполяции преимущественно лишь небольшого числа считанных значений определяют угловую функцию, которая моделирует характеристику переменного тока и из которой выводят действительную частоту переменного тока. Путем сравнения действительной частоты переменного тока с эталонной или заданной частотой делают затем вывод о возникновении аварийной электрической дуги и, при необходимости, вырабатывают сигнал оповещения. Эталонная или заданная частота является при этом выработанной частотой переменного тока, т.е. в предпочтительном случае применения частотой бортовой сети или половиной частоты бортовой сети. Можно также задавать выведенную из заданной частоты критическую частоту. Она является, например, более чем 10%-ным превышением выработанной частоты переменного тока.
Изобретение основано на том факте, что при возникновении электрической дуги или Arc Tracking соответствующий сигнал помехи накладывается на проходящий по питающему проводу внутри кабельного пучка сигнал, т.е. на синусо- или косинусоидальный сигнал переменного тока, причем вследствие прерываний сигнала за счет непрерывного гашения и повторного зажигания электрической дуги каждая полуволна сигнала имеет характеристическую частотную составляющую, выше той номинальной частоты, с которой работает бортовая сеть. Сигнал Arc Tracking содержится в полученном измерительном сигнале в виде максимумов сигнала или пиков, которые могут возникнуть в разных местах положительной и/или отрицательной полуволны измерительного сигнала, описанного ниже как косинусоидальный сигнал. Поскольку подобные наложения или помехи вследствие Arc Tracking обнаруживаются в основном в сигнале тока и в меньшей степени в сигнале напряжения, целесообразным является регистрация сигнала тока путем измерений.
Изобретение исходит из того, что непрерывный измерительный сигнал, характеристику которого снимают дискретно по времени посредством аналого-цифрового преобразователя, моделируют только по немногим значениям или считанным значениям согласно формулам:
и на этой основе можно с высокой точностью оценить действительную частоту фактической характеристики тока согласно отношению:
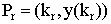
После этого предпочтительно лишь по трем считанным значениям осуществляют интерполяцию принятой в качестве предпочтительной угловой функции функции косинуса, а именно по максимальному значению (уmаx) и лежащим слева и справа рядом с ним считанным значениям (y(tl, r)). На основе лишь сравнительно небольшого обрабатываемого количества данных требуется особенно короткое время обработки. Способ отличается таким образом, в частности, высокой скоростью обработки. Вместо функции косинуса можно в качестве условия привлечь, в принципе, также функцию синуса.
Оба считанные значения, лежащие по времени перед или за максимальным значением, имеют предпочтительно одинаковое значение ординаты или значение амплитуды. Это обеспечивают, целесообразно, за счет использования заданного порогового значения: во время считывания соответствующее (левое) считанное значение как раз выше него, а соответствующее (правое) считанное значение как раз ниже него. Для дальнейшей обработки привлекают относящиеся к этим обоим считанным значениям значения абсциссы и тем самым соответствующие временные такты, т.е. пороговому значению придают соответствующий  критерий или соответствующее
критерий или соответствующее  значение этих обоих значений отсчета.
значение этих обоих значений отсчета.
В отношении устройства названная задача решается согласно изобретению посредством признаков п.12. Предпочтительные варианты являются объектом подчиненных ему зависимых пунктов.
Достигаемые изобретением преимущества состоят, в частности, в том, что посредством соответствующего алгоритма путем интерполяции, целесообразно, лишь трех считанных значений снимаемого дискретно по времени сигнала переменного тока оценивают действительную частоту переменного тока, а при ее отклонении от заданной частоты или частоты бортовой сети надежным и особенно эффективным образом можно определить возникновение Arc Tracking в кабеле бортовой сети. За счет привлечения уменьшенного преимущественно на коэффициент 10 дискретного сигнала тока, который по сравнению с характеристикой сигнала, интерполированной для оценки частоты только по очень малому количеству считанных значений, сравнительно полностью получает содержащуюся в зарегистрированном сигнале переменного тока информацию, упрощается вся обработка данных и оценка сигнала. Для этого алгоритм содержит преимущественно два параллельных маршрута программы, причем на предусмотренном для оценки частоты (первом) маршруте программы из скорости считывания, намеренно высокой для нужного высокого разрешения сигнала переменного тока, обрабатывают практически только три считанных значения. Для собственно цепи сигнала или (второго) маршрута программы было бы достаточно без заметной потери информации сравнительно малой скорости считывания, так что обрабатываемая скорость считывания, целесообразно, уменьшается за счет уменьшения количества считанных значений дискретного сигнала тока.
Работающее по этому способу устройство предпочтительно интегрировано в защитный выключатель бортовой сети воздушного летательного аппарата, так что он простым и компактным образом служит для обнаружения и отключения возникающих в кабеле бортовой сети аварийных электрических дуг. Для этого соответствующий алгоритм, целесообразно, реализуют в виде так называемой ASIC (Application Specific Integrated Circuit) (специализированная ИС), которая из-за своей малой конструктивной величины может быть помещена в обычный для такого применения защитный выключатель с особенно малыми в соответствии с требованиями габаритами.
Устройство пригодно поэтому, в частности, для обнаружения вызванных повреждениями электрических дуг, возникающих при пробоях напряжения вследствие дефектов изоляции. Устройство, прочно установленное, целесообразно, в бортовой сети подобного воздушного летательного аппарата, или дополненный этой защитной функцией защитный выключатель указывает, таким образом, дуговые повреждения и, при необходимости, селективно отключает их. За счет этого, по меньшей мере, продолжительность горения возникшей дуги сокращается таким образом, что предотвращаются последующие повреждения. Дополненный этой защитной функцией защитный выключатель пригоден тем самым, в частности, также для дооснащения уже изготовленных и/или используемых по назначению воздушных летательных аппаратов или самолетов, в которых применена традиционная изоляция кабелей. Подобное дооснащение особенно целесообразно, в частности, по экономическим соображениям, поскольку обычный срок службы самолетов составляет в настоящее время 15-20 лет.
Ниже примеры выполнения изобретения более подробно поясняются с помощью чертежей, на которых изображены:
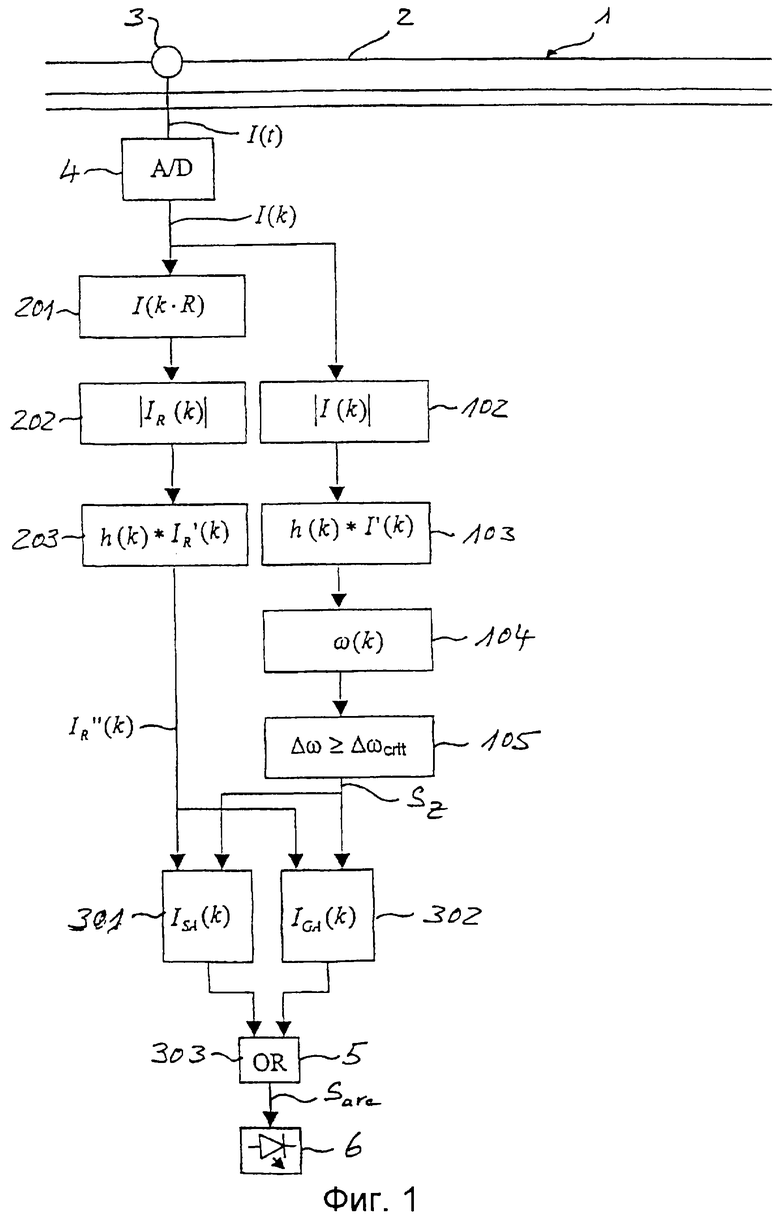
- фиг.1: блок-схема протекания способа обнаружения электрических дуг в кабеле бортовой сети;
- фиг.2: схематичная диаграмма для объяснения принципа измерения и обработки;
- фиг.3: характеристика группы Arc-сигналов и единичного Arc-сигнала;
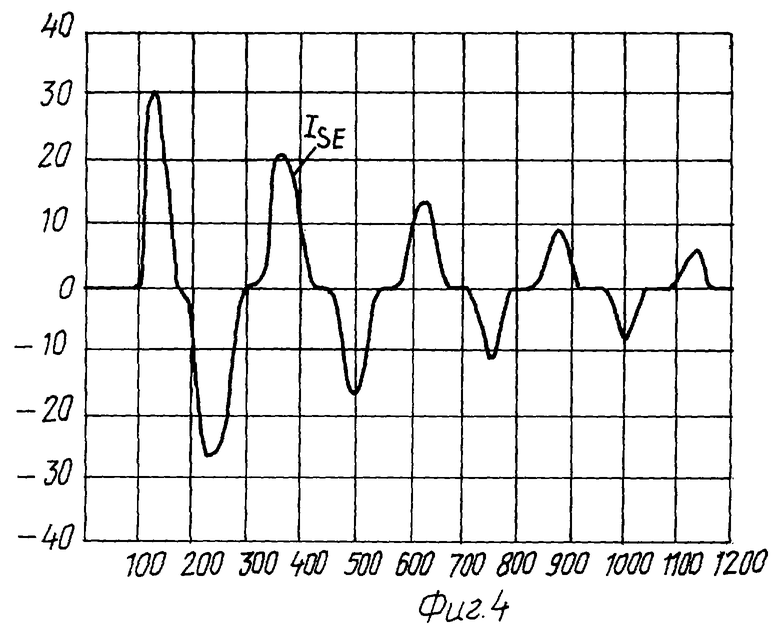
- фиг.4: типичная характеристика сигнала вследствие отключения;
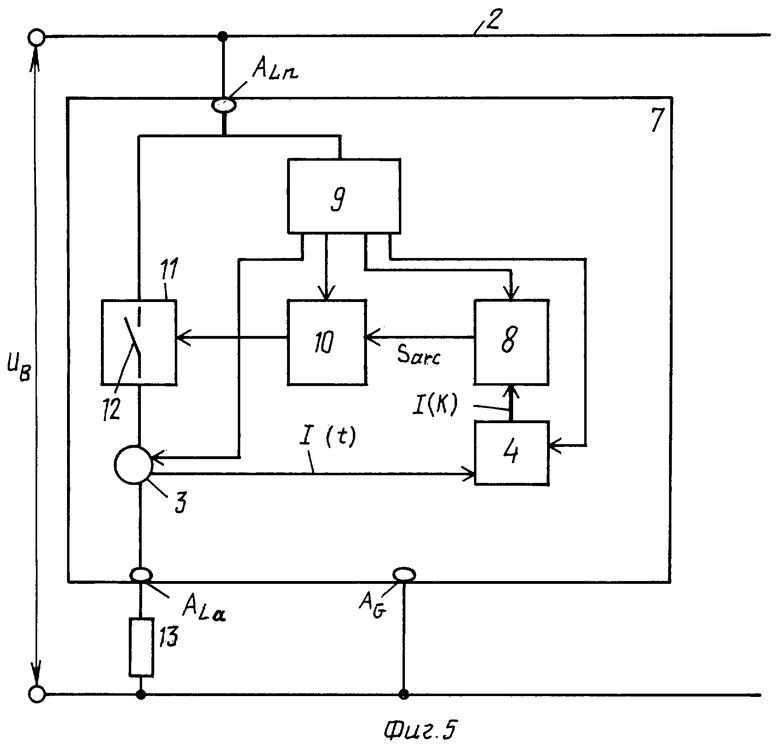
- фиг.5: блок-схема защитного выключателя, в котором реализован алгоритм для осуществления способа;
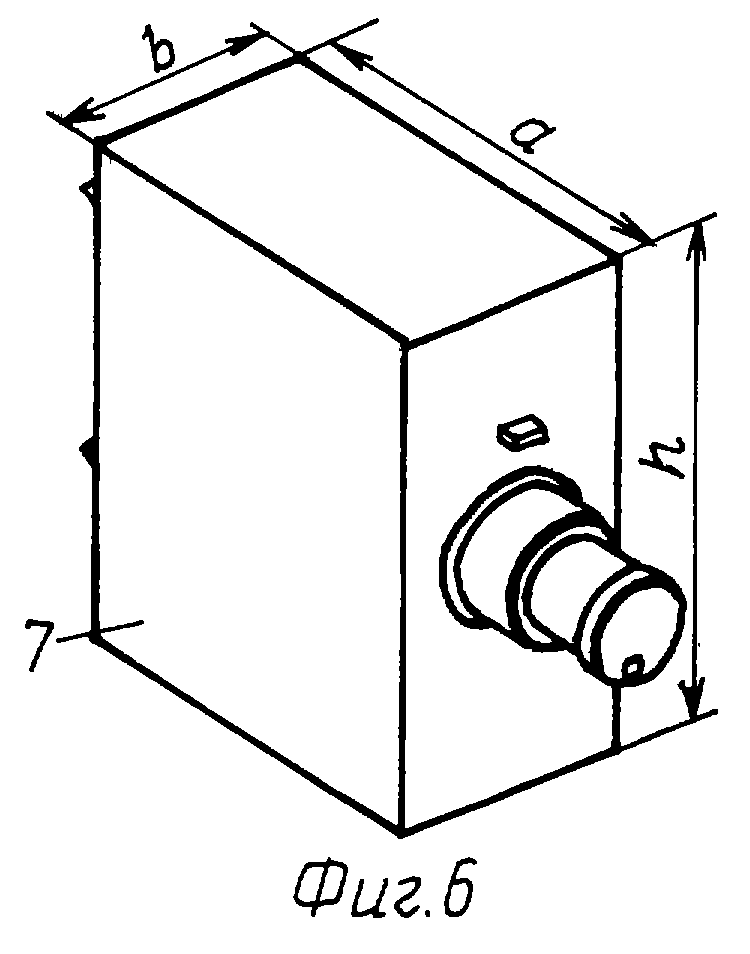
- фиг.6: в перспективе общий вид защитного выключателя.
Соответствующие друг другу детали обозначены на всех фигурах одинаковыми ссылочными позициями.
Используемое в бортовой сети воздушного летательного аппарата или самолета напряжение Ub составляет обычно 115 В при номинальной частоте f 400 Гц. Соответствующий постоянный по времени или аналоговый сигнал переменного тока с той же частотой 400 Гц может быть, таким образом, описан по теореме косинусов в общем и ненарушенном виде, т.е. без наложенных помех, формулой:

При этом  обозначает амплитуду, ϕ - фазу сигнала тока, а ω - круговую частоту, где f=ω/2π обозначает частоту сети или переменного тока.
обозначает амплитуду, ϕ - фазу сигнала тока, а ω - круговую частоту, где f=ω/2π обозначает частоту сети или переменного тока.
Исходя из этой теоремы, на фиг.1 ток I(t) в питающей линии 2 бортовой сети или кабеля 1 бортовой сети регистрируют посредством датчика или преобразователя 3 тока. Зарегистрированный сигнал I(t) тока содержит при этом дополнительно к другим помехам в качестве наложения также возникший вследствие электрической дуги Arc-сигнал. Зарегистрированный сигнал I(t) тока считывают посредством аналого-цифрового преобразователя 4 с тактовой частотой f=1/T, например, 50 кГц. Аналого-цифровой преобразователь 4 имеет при этом разрешение, по меньшей мере, 12 бит, преимущественно 16 бит. При подобной тактовой частоте f 50 кГц каждые 0,02 мс считывают значения тока (значения I(t)), причем

Этот сигнал, преобразованный из зарегистрированного непрерывного сигнала I (t) тока посредством аналого-цифрового преобразователя 4 в дискретный по времени сигнал I(k·T), обрабатывают или оценивают с помощью изображенного на фиг.1 алгоритма. Для этого сигнал I(k·T) на первом шаге 102 первого маршрута программы путем образования абсолютной величины согласно отношению

почти выпрямляют, т.е. отрицательная полуволна представляется положительной полуволной.
На следующем шаге 103 программы происходит сглаживание сигнала I'(k) посредством операции цифровой фильтрации с помощью передаточной функции

и возникает реакция на импульсное воздействие

При этом обработка сигнала I'(k) в соответствии с операцией свертки или фильтрации приводит к

При этом N=9, если соответствующее среднее значение образуют из 10 считанных значений. N обозначает, таким образом, соответствующую ширину окна цифрового фильтра. Кроме того, k соответствует действительному моменту времени, тогда как i обозначает отстоящие по времени назад значения. Цифровой фильтр или операция цифровой фильтрации работает, тем самым, в прошлое, т.е. в причинном направлении.
На втором параллельном маршруте программы дискретный по времени сигнал I(k) проходит на первом шаге 201 программы через фильтр нижних частот, причем число считанных значений после фильтрации уменьшено, например, на коэффициент R=10 согласно отношению

На следующих шагах 202 и 203 программы этого маршрута программы снова аналогично шагам 102 и 103 программы происходит сначала образование абсолютной величины уменьшенного сигнала IR(k) с результатом I'R(k), причем

Затем снова происходит сглаживание сигнала I'R(k) согласно отношениям 4а-4с с выходным сигналом:
Этот сигнал IR’’(k) подают к модулю или шагу 301 программы для оценки единичного Arc-сигнала или импульса ISA(k) дуги, а также к шагу 302 программы для оценки числа или группы IGA(k) Arc-сигналов или сигналов дуги.
На первом маршруте программы в шаге 104 действительную частоту сигнала I''(k) определяют по общему отношению:

или по полному отношению:

где
причем y(k) соответствует выходному сигналу I''(k).
Согласно этому отношению (9) на основе заданного и, тем самым, известного времени Т считывания или скорости f=1/Т считывания по значениям y(kl), y(kr) и y(kmax) или I''(kl), I''(kr) и I''(kmax) в соответствующих местах считывания или в соответствующие такты времени kr, kl, kmax можно определить действительную частоту ω(k) дискретного по времени сигнала I(k·T) и, тем самым, измеренной характеристики I(t) тока. Для этого осуществляют интерполяцию функции косинуса по трем точкам или считанным значениям, как это более подробно поясняется ниже с помощью фиг.2.
При положенном в основу времени считывания 0,02 мс и частоте бортовой сети 400 Гц получается 125 считанных значений или пар (k, y(k)) значений на период сигнала. Действительный сигнал I(k) можно, таким образом, описать через:

причем ω обозначает действительную частоту. Оценка действительной частоты ω происходит с помощью лишь трех точек:

При использовании менее трех точек пришлось бы требуемую для полного описания функции (1) косинуса величину, т.е. амплитуду i(t) или фазу ϕ, выводить из другой операции.
Для определения точек Рl и Рr предпочтительно задают пороговое значение А, при превышении которого и при смещенном по времени переходе за нижний предельный уровень которого используют соответствующее значение времени или k-значение kl, kr соответственно следующего считанного значения, тогда как в качестве соответствующего значения амплитуды или у-значения y(kl), y(kr) используют соответствующее пороговое значение А, так что справедливо:

Пороговое значение А можно при этом согласовать с максимальным током Imаx(t), когда пороговое значение А на соответствующем шаге программы автоматически устанавливают, например, на 10-70% максимального тока I(t) и, тем самым, на номинальный ток, обычно контролируемый защитным выключателем в зависимости от сечения провода. Целесообразно также распознавание частоты на соответствующем шаге программы, в частности, когда частота переменного тока или бортовой сети является переменной. Распознавание действительной частоты ω может происходить, например, перед первым шагом 102 программы и до или после считывания измерительного сигнала или сигнала I(t) тока посредством PLL (Phase Locked Loop) (система фазовой подстройки частоты).
На шаге 105 программы эту действительную частоту ω(k), полученную из дискретного по времени сигнала I(k) тока, сравнивают с пороговым значением Δωcrit, представляющим критическую частоту ω'(k), например, 50 Гц, причем справедливо:

Частота ω(k) представляет при этом половину частоты переменного тока или бортовой сети (f/2=200 Гц). Если Δω≥Δωcrit, то на шаге 105 программы вырабатывают Arc-флаг в виде сигнала Sz состояния, который направляют дальше как к шагу 301 программы, так и к шагу 302 программы. Сигнал Sz состояния при этом высокий (Sz=1), если частота ω(k), полученная из фактически зарегистрированной характеристики I(k) тока превышает пороговое значение. В противном случае сигнал Sz состояния низкий (Sz=0).
В то время как на втором маршруте программы с ее шагами или функциональными модулями 201-203 с уменьшенным дискретным сигналом IR(k) тока почти вся информация об обработанном сигнале I(k) сохранена, на первом маршруте программы с ее шагами или функциональными модулями 102-105 используют лишь ту информацию о сигнале I(k), которая требуется для оценки частоты. За счет этого обрабатываемой на первом маршруте программы частотой повторения импульсов особенно просто управлять. Обработкой уменьшенной частоты повторения импульсов на втором маршруте программы по сравнению с первоначальным дискретным сигналом I(k) тока также сравнительно просто управлять, причем этот маршрут программы или цепь передачи сигнала обеспечивает к тому же достаточно точную оценку содержащейся в полном сигнале согласно (11) информации, в частности, в отношении нескольких амплитуд y(kmax) сигнала.
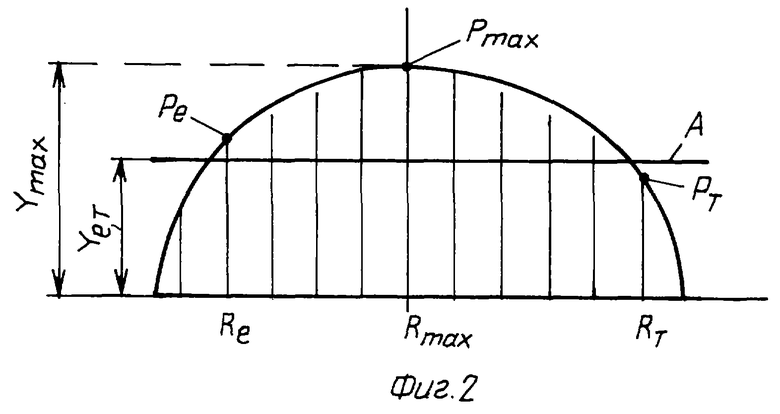
На шаге 301 программы определяют и анализируют лишь единичные Arc-сигналы ISA(k), тогда как на шаге 302 определяют и анализируют группу IGA(k) Arc-сигналов. На фиг.3 изображена типичная характеристика Arc-сигнала группы IGA(k) (слева) и единичного Arc-сигнала ISA(k) (справа).
На шаге 301 программы с помощью уменьшенного по скорости считывания сигнала I’’R(k) на шаге 203 и сигнала Sz состояния на шаге 105 программы исследуют, лежит ли, по меньшей мере, L полуволн сигнала I’’R(k) в пределах задаваемого отрезка времени. Для этого образуют выведение сигнала I’’R(k), т.е. его возрастание определяют по соотношению

Если Sz=1, a grad(k)>gradmax, т.е. значение grad(k) превышает пороговое значение, то соответствующую полуволну сигнала I’’R(k) рассматривают как потенциальный Arc-сигнал и повышается показание счетчика. Если показание счетчика лежит в пределах отрезка времени выше L, то на шаге 301 программы вырабатывается представляющий регистрацию дуги сигнал оповещения, например высокий или 1. Этот сигнал подают для выполнения логической операции ИЛИ (шаг 303) или к логическому элементу 5 ИЛИ, подающему сигнал Sаrс оповещения к индикаторному элементу 6, например, в виде светодиода (LED).
На шаге 302 программы группу IGA(k) Arc-сигналов сравнивают с возможно (одновременно) возникающей характеристикой сигнала помехи вследствие произошедшего со стороны потребителя отключения, типичная характеристика ISE сигнала которого изображена на фиг.4. Правда, подобный сигнал Isa помехи вследствие включения или выключения присоединенного через этот бортовой кабель 1 потребителя или нагрузки имеет схожую с Arc-сигналами IGA(k) характеристику. Однако подобный сигнал ISA помехи, как известно, затухает по экспоненциальной функции, чего не происходит у типичной группы IGA(k) Arc-сигналов.
С помощью или на основе этого характера затухания можно поэтому вследствие отключений отличить подобный сигнал помехи от типичной группы IGA(k) Arc-сигналов. Для этого осуществляют сначала определение максимумов всех полуволн Arc-сигналов группы IGA(k), частота ω которых лежит выше критической частоты ω'. Затем осуществляют суммирование значений М следующих друг за другом максимумов, а также определение максимума значений М и образование среднего значения. По достижении задаваемой доли среднего значения, например, 90% обнаруживается Arc-Tracking, и на шаге 302 вырабатывается представляющий регистрацию дуги сигнал оповещения, например высокий или 1. Этот сигнал подают для выполнения логической операции ИЛИ (шаг 303), в результате выполнения которой вырабатывается сигнал Sаrс оповещения для индикаторного элемента 6 или для срабатывания защитного выключателя (фиг.5).
Вся функция программы преимущественно интегрирована в ASIC (Application Specific Integrated Circuit) (специализированная ИС), которая, в свою очередь, в качестве неотъемлемой составной части помещена в защитный выключатель 7 (фиг.6), обычно предусмотренный в воздушном или космическом летательном аппарате. Габариты защитного выключателя 7 согласованы в этом случае применения с требованиями, обычно предъявляемыми к воздушным и космическим летательным аппаратам, и составляют примерно а=50 мм, h=40 мм и b=20 мм.
На фиг.5 изображены функциональные модули такого защитного выключателя 7 со встроенным аналого-цифровым преобразователем 4 и функциональным модулем ASIC 8, в который жестко запрограммирован изображенный на фиг.1 и работающий согласно описанному здесь способу алгоритм. Сетевая часть 9 вырабатывает питающий ток или питающее напряжение для функционального модуля 8 и предвключенного ему аналого-цифрового преобразователя 4, а также для также встроенного датчика 3 тока и модуля 10 дистанционного срабатывания в виде, например, катушки срабатывания. Последняя связана с функцией 11 защитного выключателя, в частности, по меньшей мере, одним расцепителем, замком и коммутирующим контактом 12. Коммутирующий контакт 12 включен между LINE-выводом АLn и LOAD-выводом ALd защитного выключателя 7, содержащего дополнительно заземляющий вывод AG.
При присоединении защитного выключателя 7 к питающему проводу 2 бортовой сети или бортового кабеля 1 датчик 3 тока регистрирует сигнал I(t) тока, идущий при замкнутом коммутирующем контакте 12 через функцию 11 защитного выключателя к исполнительному механизму, датчику и, тем самым, к потребителю бортовой сети или вообще к нагрузке 13 бортовой сети 1. Его обработка для регистрации Arc-сигналов (Arc Tracking) вследствие возникающей вдоль кабеля 1 бортовой сети дуги происходит внутри защитного выключателя 7 посредством аналого-цифрового преобразователя 4 и модуля FPGA 8 (матрица логических элементов, программируемая пользователем). Последний вырабатывает в случае описанного обнаружения Arc Tracking сигнал Sаrс оповещения, направляемый к индикатору 6 и/или модулю 10 дистанционного срабатывания. Последний подает сигнал SA срабатывания к действующей, в частности, в качестве защиты линии функции 11 защитного выключателя, которая размыкает коммутирующий контакт 12 и отделяет, таким образом, соответствующую нагрузку 13 от питающей линии 2 и, тем самым, от бортовой сети 1.
Защитный выключатель 7 обеспечивает, таким образом, дополнительно к традиционной защите от тока перегрузки в бортовой сети подобного воздушного летательного аппарата расширенную защиту также от аварийных электрических дуг, так что имеющееся бортовое оборудование надежно защищено.
Перечень ссылочных позиций
1 - бортовая сеть
2 - питающая линия
3 - датчик тока
4 - аналого-цифровой преобразователь
5 - логический элемент ИЛИ/логическая операция ИЛИ
6 - индикаторный элемент
7 - защитный выключатель
8 - функциональный модуль ASIC
9 - сетевая часть
10 - модуль дистанционного срабатывания
11 - функция автоматического выключателя
12 - коммутирующий контакт
13 - нагрузка
102-303 - шаги программы
I(t) - сигнал переменного тока
I(k) - дискретный по времени сигнал тока
ISA - (единичный) Arc-сигнал
IGA - группа Arc-сигналов
ISE - характеристика сигнала помехи
Sаrс - сигнал оповещения
Sz - сигнал состояния
Предложен способ обнаружения аварийных электрических дуг (Arc Tracking) в кабеле, в частности в кабеле бортовой сети воздушного летательного аппарата, при котором зарегистрированный сигнал (I(t)) переменного тока дискретно по времени считывают и посредством интерполяции определенного числа считанных значений (у(k)) определяют угловую функцию (I(k)), которая моделирует характеристику переменного тока и из которой выводят действительную часть (ω) переменного тока. Из результата сравнения действительной частоты (ω) переменного тока с заданной частотой (ω′) делают вывод о возникновении аварийной электрической дуги (ISA, IGA) и, при необходимости, вырабатывают сигнал (Sarc) оповещения. Работающее по этому способу устройство интегрировано преимущественно в защитный выключатель (7) для бортовой сети воздушного летательного аппарата, так что он служит для обнаружения и отключения возникающих в кабеле (1) бортовой сети аварийных электрических дуг. Технический результат - повышение надежности защиты. 3 с. и 13 з.п. ф-лы, 6 ил.

где
причем 1/Т обозначает тактовую частоту, а kl, kmax, kr обозначают приданные соответствующим амплитудным значениям у(kl), у(kmax), y(kr) временные такты (k· T) считанных значений (у(k)).

причем N обозначает ширину окна цифровой фильтрации, а h(k) - результирующую из этого реакцию на импульсное воздействие, при этом h(k)=1/N для k=0 до N-1, а в остальном h(k)=0.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОКА ФОРМИРОВАНИЯ КАНАЛА ВЫСОКОВОЛЬТНОГО ПРОБОЯ В КРИСТАЛЛИЧЕСКИХ ДИЭЛЕКТРИКАХ ПО ЗАВИСИМОСТИ СКОРОСТИ ФОРМИРОВАНИЯ КАНАЛА ПРОБОЯ ОТ НАПРЯЖЕНИЯ | 1996 |
|
RU2108592C1 |
| , -Ди- / -5-тетразолил(1н) -этилен/ этилендиамин дихлоргидрат в качестве комплексообразующего вещества | 1977 |
|
SU639879A1 |
| DE 4029141 А, 12.03.1992. | |||

