Область техники, к которой относится изобретение
Настоящее изобретение относится к генератору энергии в качестве динамоэлектрической машины с отдельным использованием сил взаимодействия и их уравновешиванием с постоянными магнитами.
Термин “динамоэлектрическая машина” обозначает любую машину, которая преобразует механическую энергию в электрическую энергию и наоборот. Типом машины, к которому относится настоящее изобретение, является тот, в котором первичная часть содержит множество полюсных расширений, а вторичная часть содержит последовательность гетерономных чередующихся постоянных магнитов.
Уровень техники
Общеизвестно, что как в двигателях, так и в генераторах этого вида электромагниты взаимодействуют путем притяжения или отталкивания по всему шагу магнитов в двух полуциклах, то есть по полным циклам от постоянного магнита до постоянного магнита, и, следовательно, ни в одном из известных двигателей или генераторов не учитывается ни действующий эффект взаимодействия магнитов с ферромагнитными сердечниками с высокой магнитной проницаемостью, ни равновесие, то есть уравновешивание ферромагнитных сил, которые ликвидируют крутящий момент противодействия постоянными магнитами при прохождении от одного постоянного магнита до другого.
Сущность изобретения
Хотя при нижеприведенном рассмотрении ссылка делается, ради удобства, главным образом на двигатели, это рассмотрение также применимо для генераторов.
В частности, предметом изобретения является определение относительного расположения пар электромагнитов первичной части и постоянных магнитов вторичной части, которое может согласовывать действующие силы, магнитная природа которых соответственно постоянная, ферромагнитная и электромагнитная.
Другим предметом настоящего изобретения является достижение высокой эффективности преобразования электрической энергии в механическую и наоборот, благодаря соответствующему электропитанию электромагнитов первичной части при их взаимодействии с постоянными магнитами вторичной части.
Еще одним предметом изобретения является создание электрического двигателя, которым можно управлять соответствующей системой управления в соответствии с характеристиками, необходимыми для каждого конкретного случая, с соответствующими датчиками, например оптическими, магнитными, резистивными, индуктивными и другими типами датчиков, которые, посредством электронных схем на транзисторах, тиристорах или симисторах, управляют электропитанием машины, а также обычными щеточными коллекторами, способными подавать ток на чередующихся полюсных шагах на обмотки, смещенные на полюсный шаг, сначала на одну, затем на другую, в последовательности из четырех шагов полного цикла.
Изобретение, как оно определено в нижеследующей формуле изобретения, решает проблему создания динамоэлектрической машины с согласованием сил взаимодействия типа, имеющего первичную часть, содержащую одну или несколько пар полюсных расширений, одно расположено по центру постоянных магнитов, а другие между двумя постоянными магнитами, которые взаимно разнесены на полюсный шаг и каждое снабжено ферромагнитным сердечником и, по меньшей мере, одной электромагнитной обмоткой, и вторичную часть, содержащую последовательность чередующихся гетерономных постоянных магнитов, и связанную с ними систему управления, которая, с общей точки зрения, характеризуется тем, что каждый полюсный шаг с электрической проводимостью имеет протяженность, равную половине постоянного магнита из упомянутых чередующихся гетерономных постоянных магнитов, и что упомянутая электрическая проводимость возбуждается с чередующимися фазами: на первом шаге обмотка или обмотки с отрицательной обратной связью, обращенные к центру постоянного магнита, затем на втором шаге обмотка или обмотки с отрицательной обратной связью, которые были расположены между постоянными магнитами и которые, в свою очередь, были перемещены к центру, затем третий шаг - снова обмотка или обмотки с отрицательной обратной связью первого шага, но с противоположной электрической полярностью, по-прежнему с отрицательной обратной связью, затем четвертый шаг - снова обмотка или обмотки с отрицательной обратной связью второго шага с противоположной электрической полярностью, по-прежнему с отрицательной обратной связью, завершая полный цикл электрической проводимости, при этом две фазы выполняются для отдельных двух четвертей первой обмоткой уравновешивающей пары, а для других отдельных двух четвертей - второй обмоткой уравновешивающей пары, смещенной на полюсный шаг и всегда с электрической полярностью, пригодной для создания отрицательной обратной связи с противоположными постоянными магнитами, и всегда при выводе каждого половинного чередующегося гетерономного постоянного магнита. Изобретение позволяет “естественной” силе постоянных магнитов, действующей при притяжении чередующимися гетерономными постоянными магнитами ферромагнитных сердечников с высокой магнитной проницаемостью, всегда быть неуравновешенной при притяжении, сначала одного ферромагнитного сердечника, затем другого, действующих совместно для создания полного параллельного и совмещаемого двойного цикла “естественной” механической энергии, которая подается на вал динамоэлектрической машины, вместе с циклом “искусственной” электромагнитной энергии, преобразованной отрицательной обратной связью, с последующим сложением двух отдельных и параллельных энергий, создавая высокую эффективность машины изобретения.
Хотя в настоящем описании изобретение описывается с ссылкой на вращающуюся динамоэлектрическую машину, оно также может быть применимо к линейным машинам или кольцеобразным линейным машинам и к устройствам для частичного сервоуправления.
Другие признаки и преимущества настоящего изобретения очевидны из последующего подробного описания предпочтительных вариантов выполнения, представленных исключительно с целью неограничивающего примера на прилагаемых чертежах.
Перечень фигур чертежей
На фиг.1 схематически изображен поперечный разрез варианта выполнения динамоэлектрической машины в соответствии с настоящим изобретением.
На фиг.2 изображены основные элементы динамоэлектрической машины, показанной на фиг.1, и относящаяся к ним диаграмма сил, взаимодействующих между ними.
На фиг.3 схематически изображен полный цикл притяжения и отталкивания между основными элементами динамоэлектрической машины, показанной на фиг.1.
На фиг.4 схематически изображен полный цикл притяжения и отталкивания между парами электромагнитов и магнитов.
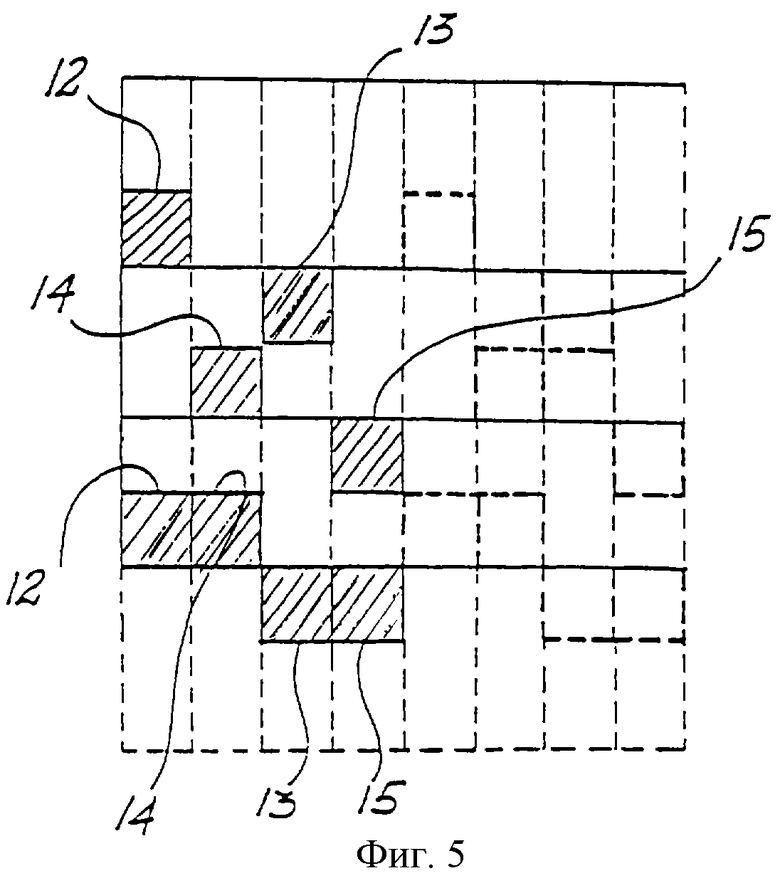
На фиг.5 изображена диаграмма действующих электромагнитных энергий в цикле фиг.4.
На фиг.6 изображена диаграмма действующего ферромагнетика в цикле фиг.4.
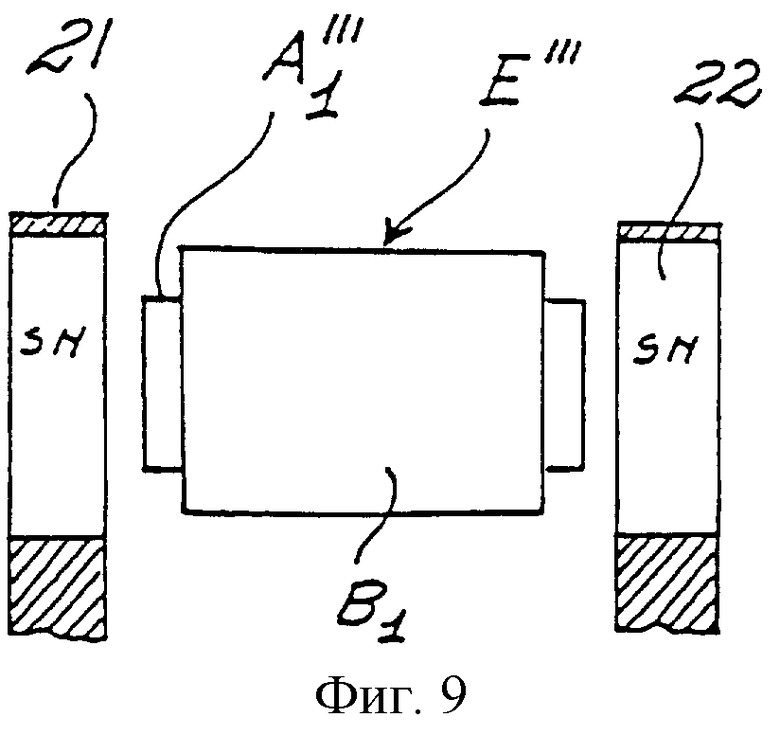
На фиг.7-9 схематически изображены в разрезе соответствующие различные расположения электромагнитов первичной части и постоянных магнитов вторичной части, к которым может быть применимо настоящее изобретение.
Сведения, подтверждающие возможность осуществления изобретения
В соответствии с настоящим изобретением на фиг.1 схематически изображен поперечный разрез варианта выполнения электрического двигателя, взятого, например, из генератора энергии в качестве динамоэлектрической машины в соответствии с настоящим изобретением.
Как показано на фиг.1, на опорной станине 1 установлен статор 2, первичная часть машины, соосно которому внутри его расположен ротор 3, вторичная часть. В статоре 2 предусмотрены одна или несколько пар полюсных групп, две в показанном примере, обозначенные C1 и C2. Полюсные группы E1, E2, Е3, Е4 и пары C1, С2 взаимно разделены полюсным шагом (р), то есть расстоянием, измеренным по дуге воздушного зазора между началом постоянного магнита и его центром (половина магнита). Каждая полюсная группа (E1, E2, Е3, Е4) снабжена ферромагнитным сердечником подковообразной формы (A1, А2, А3, А4) и электромагнитными обмотками (B1, B1', B2, B2', В3, В3', В4, В4'). Во вторичной части ротор 3 предусмотрен с последовательностью чередующихся гетерономных постоянных магнитов 31, 32,...310, отделенных от полюсных групп E1, Е2, Е3, Е4 воздушным зазором 4. Также предусмотрена система управления двигателем известного типа, схематически изображенная щеточным коллектором 5, характеризующимся наличием нейтральных полюсных шагов (p2) и проводящих полюсных шагов (p1) для чередующейся электрической коммутации обмоток (B1, B1', В2, В2') или (В3, В3', В4, B4') с инверсией полярности вследствие отрицательной обратной связи с гетерономными чередующимися постоянными магнитами на выводном полюсном шаге каждой половины магнита.
Другими словами, машина содержит одну или несколько пар C1, С2 полюсных групп E1 и Е3, E2 и E4, механически и электрически разнесенных на полюсный шаг (р), равный четверти цикла или “половине постоянного магнита” 3, одна полюсная группа E1 и Е3, расположена напротив полного положения чередующихся гетерономных постоянных магнитов 32 и 33, 37 и 38, а другая, Е2 и Е4, - между постоянными магнитами 34, 35 и 35, 36, 39, 310 и 310, 31, создают в результате равновесие ферромагнитных сил крутящего момента, взаимодействующих между сердечниками с высокой магнитной проницаемостью A1 и А2, А3 и А4 и чередующимися гетерономными постоянными магнитами 31, 32,...310, и электрическое смещение между электромагнитными обмотками пар B1, B1' и В2, В2', В3, В3' и В4, В4' для смежного завершения чередующихся шагов, совмещаемых в двух полных и отдельных циклах положительной и отрицательной энергии на двух гетерономных постоянных магнитах противоположной полярности в четырех четвертях цикла (12, 14, 13 и 15; 16, 18, 19 и 17), каждая электромагнитная обмотка пары или группы обмоток, равномерно расположенных в фазе (B1, B1', В3 и В3'; В2, В2', B4 и В4'), попеременно действует в течение двух отдельных четвертей цикла с “искусственной электромагнитной или механической энергией” (12 и 13; 14 и 15) во время проводящих полюсных шагов (p1) ив течение двух отдельных четвертей цикла с “естественной ферромагнитной энергией” (16 и 17; 18 и 19) во время электрически изолированных нейтральных полюсных шагов (р2), посредством связанной с ними системы управления 5, завершая два цикла отдельной, последовательной, совмещаемой и параллельной “искусственной” энергии 12, 14, 13 и 15 плюс “естественной” энергии 16, 18, 19 и 17. Когда динамоэлектрическая машина работает в качестве генератора механической энергии, то есть как двигатель, на каждую электромагнитную обмотку или группу обмоток (B1, B1', В3 и В3'; B2, B2', В4 и B4'), равномерно расположенных, подается положительный или отрицательный электрический ток для получения отрицательной обратной связи от центра постоянных магнитов для полюсного проводящего шага (р1) до конца постоянных магнитов на чередующихся шагах 12, 14, 13 и 15 и прилегающих для полного цикла отталкивания на двух магнитах противоположной полярности и для каждых двух отдельных четвертей (12 и 14; 13 и 15), тогда как “естественный” цикл притяжения постоянных магнитов осуществляется ферромагнитными сердечниками (A1, А3; А2, А4), параллельно и с совмещением с “искусственным” циклом, во время нейтральных полюсных шагов (p2) обмоток (16, 18, 19 и 17), на которые не подается электропитание, также для каждых двух отдельных двух четвертей (16 и 17; 18 и 19); и наоборот, когда динамоэлектрическая машина работает как генератор электрической энергии, на нее подается механическая энергия, к которой добавляется полный цикл “естественного” магнитного притяжения во время нейтральных полюсных шагов (р2).
Изображенный вариант выполнения полюсных групп относится к идеальной цепи с замыканием электромагнитного потока в паре последовательных постоянных магнитов с противоположной полярностью.
Затем, ниже в описании показано, как реализованная таким образом динамоэлектрическая машина осуществляет согласование сил взаимодействия и, как результат, высокую эффективность.
Для простоты ниже будет рассматриваться случай полюсных групп, не взаимодействующих с парами постоянных магнитов, а с постоянным магнитом в данный момент времени.
В частности, в случае, когда машина работает как двигатель, на фиг.2 обозначения A1 и B1 обозначают соответственно ферромагнитный сердечник и электромагнитную обмотку полюсной группы E1 первичной части, а обозначение 31 обозначает постоянный магнит вторичной части. Ради удобства, рассматривается относительное движение полюсной группы A1, B1 относительно постоянного магнита 31, как если бы ротор был неподвижным.
Ферромагнитный сердечник A1 имеет высокую магнитную проницаемость, так что он притягивается постоянным магнитом 31 “естественным” ферромагнитным притяжением, когда на обмотку B1 не подано питание. Полюсная группа E1 перемещается к E1'. Соответствующая энергия пропорциональна площади поверхности прямоугольного треугольника 6. “Искусственное” электромагнитное отталкивание, когда на обмотку B1 подается питание, пропорционально площади поверхности треугольника 7. Полюсная группа E1 перемещается к E1".
На фиг.3 схематически показано полное притяжение и отталкивание с чередующимися шагами полюсной группы E1, с парой постоянных магнитов 31 и 32 противоположной полярности. Полюсная группа E1 перемещается к E1' “естественным” магнитным притяжением между упомянутым постоянным магнитом 31 и ферромагнитным сердечником A1. Соответствующая энергия пропорциональна площади поверхности прямоугольника 8. “Искусственное” электромагнитное отталкивание, когда на обмотку B1 подается положительная электрическая энергия, пропорционально площади поверхности прямоугольника 9. Полюсная группа E1 перемещается к E1". Следовательно, посредством “естественного” магнитного притяжения постоянным магнитом 32 полюсная группа E1 перемещается к E1'". Соответствующая энергия, вследствие “естественного” притяжения постоянным магнитом, пропорциональна площади поверхности прямоугольника 10. Таким образом, “искусственное” электромагнитное отталкивание, когда на обмотку B1 подается отрицательная электрическая энергия, пропорциональное площади поверхности прямоугольника 11, перемещает полюсную группу E1 в E1"", где оно готово для притяжения в другом цикле. Как показано на фиг.4, механическое соединение (С) устанавливает на расстоянии ферромагнитные сердечники A1 и А2 для уравновешивания сил “естественного” притяжения постоянными магнитами между постоянным магнитом и другим (31, 32, 33, 34,...), причем упомянутые ферромагнитные сердечники (A1 и А2) разнесены на магнитный шаг р, равный половине постоянного магнита, как в двигателе, показанном в качестве примера на фиг.1, или половине постоянного магнита плюс один магнит, как на схеме вышеупомянутого примера полного цикла, показанного на фиг.4, или половине постоянного магнита плюс множество полных постоянных магнитов, равномерно разнесенных ( ,
,  ,
,  ...). Таким образом, силы крутящего момента, вызванные “естественным” ферромагнитным притяжением, уравновешиваются и ликвидируют друг друга; кроме того, смещение фазы (р) между обмотками (B1 и В2) на половину постоянного магнита имеет целью завершение с непрерывностью двух параллельных отдельных и совмещаемых циклов энергии в течение всех четырех шагов, необходимых для “естественной” энергии притяжения постоянными магнитами и “искусственной” энергии электромагнитного отталкивания. Также схематически показан цикл притяжения ферромагнитных сердечников A1 и А2 и полный цикл отталкивания пары полюсных групп E1 и Е2 соответствующими чередующимися постоянными магнитами (31, 32, 33, 34), для каждой полюсной группы E1 и E2 и каждого ферромагнитного сердечника A1 и А2 можно повторить, что было сказано с ссылкой на фиг.3, снова подчеркивая, что благодаря полюсному шагу (р), равному половине магнита, достигается согласованность между “естественными” магнитными силами и “искусственными” электромагнитными силами, которая приводит к увеличению эффективности относительно случая, при котором подача электропитания на обмотки производится непрерывно в положительном и соответственно в отрицательном полуцикле. Цикл подачи электропитания положительной и отрицательной полярности на две обмотки E1 и Е2 изображен вместо этого на фиг.5, подробно обозначенный 12, 13, 14 и 15 для четырех шагов полного цикла. На фиг.6 вместо этого показано действие ферромагнитных сил притяжения в этих же шагах цикла 16, 17, 18, 19.
...). Таким образом, силы крутящего момента, вызванные “естественным” ферромагнитным притяжением, уравновешиваются и ликвидируют друг друга; кроме того, смещение фазы (р) между обмотками (B1 и В2) на половину постоянного магнита имеет целью завершение с непрерывностью двух параллельных отдельных и совмещаемых циклов энергии в течение всех четырех шагов, необходимых для “естественной” энергии притяжения постоянными магнитами и “искусственной” энергии электромагнитного отталкивания. Также схематически показан цикл притяжения ферромагнитных сердечников A1 и А2 и полный цикл отталкивания пары полюсных групп E1 и Е2 соответствующими чередующимися постоянными магнитами (31, 32, 33, 34), для каждой полюсной группы E1 и E2 и каждого ферромагнитного сердечника A1 и А2 можно повторить, что было сказано с ссылкой на фиг.3, снова подчеркивая, что благодаря полюсному шагу (р), равному половине магнита, достигается согласованность между “естественными” магнитными силами и “искусственными” электромагнитными силами, которая приводит к увеличению эффективности относительно случая, при котором подача электропитания на обмотки производится непрерывно в положительном и соответственно в отрицательном полуцикле. Цикл подачи электропитания положительной и отрицательной полярности на две обмотки E1 и Е2 изображен вместо этого на фиг.5, подробно обозначенный 12, 13, 14 и 15 для четырех шагов полного цикла. На фиг.6 вместо этого показано действие ферромагнитных сил притяжения в этих же шагах цикла 16, 17, 18, 19.
Поэтому, когда динамоэлектрическая машина работает как двигатель, на каждую электромагнитную обмотку подается положительный и отрицательный электрический ток, или наоборот, только в течение двух отдельных четвертей цикла во время полного цикла притяжения и отталкивания на двух последовательных постоянных магнитах.
Итак, динамоэлектрическая машина согласно изобретению имеет в своей первичной части по меньшей мере пару полюсных групп, из которых одна расположена напротив центра постоянного магнита в последовательности чередующихся гетерономных постоянных магнитов вторичной части, а другая группа расположена напротив границы двух из упомянутых постоянных магнитов. Пара полюсных групп имеет назначение уравновешивания и завершения частичного цикла линейной подачи электропитания на смежных сегментах, а также отдельно “естественного” частичного цикла (обмотки расширений работают только при отталкивании при выводе половины постоянных магнитов; ферромагнитные сердечники с высокой магнитной проницаемостью работают только при притяжении при вводе половины постоянных магнитов).
Другими словами, подача электропитания на полюсные группы с чередующимися шагами происходит тогда, когда ферромагнитный сердечник находится в центре постоянного магнита с отрицательной обратной связью и до конца постоянного магнита, тогда как естественное ферромагнитное притяжение - от начала постоянного магнита до его центра, сначала одного, затем другого, линейно объединяя частичный цикл силы. Энергия, вырабатываемая в цикле подачи электропитания, и энергия, вырабатываемая при естественном цикле постоянных магнитов, суммируются силами взаимодействия на валу машины. Подача электропитания постоянным током знакопеременной энергии на полюсные группы и на по меньшей мере одну пару, сначала на одну, а затем на другую группу с отрицательной обратной связью (отталкиванием), происходит при полных циклах и с непрерывным поглощением, и “искусственная” электрическая энергия преобразуется в механическую энергию, тогда как притяжение на чередующихся шагах между ферромагнитными сердечниками по меньшей мере одной пары и постоянными магнитами, при вводе сначала одного, а затем другого сердечника, создает дополнительную “естественную” механическую энергию, совмещаемую и параллельную, непрерывную и линейную, которая суммируется на валу с преобразуемой “искусственной” энергией. Наоборот, если динамоэлектрическая машина настоящего изобретения работает как генератор механической энергии, на вал машины подается механическая энергия, которая преобразуется в электрический ток каждой электромагнитной обмоткой в течение каждых двух отдельных четвертей цикла во время полного цикла, создаваемая энергия отводится при помощи системы управления во время проводящих шагов, тогда как “естественная энергия” нейтральных шагов, действующая при притяжении, добавляет свою энергию к механической энергии, создаваемой на валу, в результате двойная преобразуемая энергия и полная мощность относится к сумме каждого отдельного цикла; или отдельное и непосредственное извлечение из равномерно расположенных обмоток, принадлежащих двум совмещаемым циклам энергий, в этом случае их электрическая энергия может быть выпрямлена перед воссоединением на выходе или повторно сфазирована.
Согласование вышеупомянутых сил взаимодействия характеризует изобретение “генератора энергии” как высокоэффективную динамоэлектрическую машину.
На фиг.7 показано схематическое представление первого возможного вида взаимодействия полюсной группы с замыканием магнитного потока и с парой гетерономных постоянных магнитов 31, 32 в противоположном положении относительно ферромагнитного сердечника (A1'), как в примере на фиг.1, для вращающейся и линейной динамоэлектрической машины, упомянутое полюсная группа может быть расположена как линейно по окружности, так и продольно оси вторичной части с чередующимися гетерономными постоянными магнитами, в этом случае с двойной полосой.
Как показано на фиг.8, полюсная группа Е" имеет воздушные зазоры по обеим сторонам ферромагнитного сердечника (А1") в осевом расположении относительно полосы чередующихся гетерономных постоянных магнитов 20 для замыкания магнитного потока, как в случае так называемого линейного и линейного кольцеобразного двигателя.
Как показано на фиг.9, полюсная группа Е"' для замыкания магнитного потока имеет постоянные магниты по обеим сторонам ферромагнитного сердечника (A1"') с двумя полосами чередующихся гетерономных постоянных магнитов 21, 22, принадлежащих двум осевым роторам или двум линейным направляющим. Кроме того, без ссылок, необходимо заметить, что для конструкции и расположения полюсных групп, ферромагнитных сердечников, постоянных магнитов и их воздушных зазоров реализация может быть осуществлена, например в обычных и известных динамоэлектрических машинах, необходимо только, согласно изобретению, соблюдать согласование биномиального разделения взаимодействующих потоков с чередующейся подачей “искусственного” электропитания на активных шагах и нейтральных шагах (без подачи питания), которые позволяют использовать “естественную” энергию потенциального притяжения между ферромагнитными сердечниками и постоянными магнитами, всегда неуравновешенную при магнитном притяжении шаг за шагом, основной и обязательный признак предметного изобретения.
Исключительно в качестве экспериментального, демонстративного, теоретического и практического примера, изобретение может быть реализовано с двумя динамоэлектрическими машинами с коллектором, соответствующе и просто модифицированным для применения метода разделения сил взаимодействия, составляющего предмет изобретения: два коллектора модифицируются, каждый электрический полюсный шаг делится на два шага, нейтральный шаг и проводящий шаг, валы двух машин скрепляются механически последовательно, образуя общий механический вал, учитывая, что необходимо получить смещение на полюсный шаг коллектора одной машины относительно другого коллектора другой машины, так что, например в случае двигателя, электропитание подается с чередующимися полюсными шагами сначала на одну машину, а затем на другую, преобразуя электрическую энергию “искусственной” электромагнитной силы отталкивания в механическую энергию, тогда как естественная магнитная потенциальная энергия нейтральных полюсных шагов при ферромагнитном притяжении создает дополнительную “естественную” механическую энергию, параллельную и совмещаемую, причем результирующая на валу определяется суммой действующих энергий, разделенных и взаимно согласованных: “искусственная” плюс “естественная”.
Созданное таким образом изобретение может быть подвержено различным модификациям и изменениям, не выходящим за пределы объема идеи изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1999 |
|
RU2219641C2 |
| ДИНАМОЭЛЕКТРИЧЕСКАЯ МАШИНА, ВРАЩАЮЩАЯСЯ ПОСРЕДСТВОМ ЭЛЕКТРОМАГНИТНОЙ ИНДУКЦИИ, ДЕЙСТВУЮЩЕЙ В ЛИНЕЙНЫХ ЭЛЕКТРОДВИГАТЕЛЯХ | 1998 |
|
RU2248080C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ С ПЕРЕМЕННОЙ СКОРОСТЬЮ ВРАЩЕНИЯ | 2003 |
|
RU2275734C2 |
| ЦЕПЬ ДЛЯ СИНУСОИДАЛЬНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ, ПОДАВАЕМОЙ НА НАГРУЗКУ | 2005 |
|
RU2367084C2 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2316882C1 |
| ЭЛЕКТРОМАГНИТОИМПУЛЬСНЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2699026C1 |
| Электрическая машина постоянного тока | 1982 |
|
SU1119129A1 |
| Магнитоэлектрический генератор | 2019 |
|
RU2716011C1 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2019 |
|
RU2707559C1 |
| БЕСЩЕТОЧНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2006 |
|
RU2388132C2 |






Настоящее изобретение относится к области электротехники, а именно к динамоэлектрическим машинам, в частности - к генераторам энергии, с раздельным и согласованным использованием положительных и отрицательных сил взаимодействия между первичной частью (2) и вторичной частью (3) машины. Сущность изобретения состоит в том, что первичная часть (2) содержит одну или несколько пар (C1, С2) полюсных групп (E1, Е2; Е3, E4) с полюсными группами по меньшей мере одной пары, которые механически разделены и электрически смещены друг от друга на полюсный шаг (р), каждая полюсная группа содержит ферромагнитный сердечник (A1, A2, А3, А4) и по меньшей мере электромагнитную обмотку (B1, В1', В2, В2', В3, В3', В4, В4'), а вторичная часть (3) содержит последовательность чередующихся постоянных магнитов (31, 32,...,310) противоположной полярности и связанную с ними систему (5) управления. Каждый полюсный шаг соответствует (n + 1/2) размера постоянного магнита в данном направлении, где n равно 0 или положительному целому числу. При этом магнитные силы уравновешиваются вследствие характерного парного расположения полюсных групп, действующих отдельно во время проводящих полюсных шагов (p1), во время подачи электропитания на электромагнитные обмотки и при отсутствии подачи питания во время следующих за шагами (p1) нейтральных полюсных шагов (р2), причем каждый полюсный шаг соответствует (n + 1/2) размера постоянного магнита, где n равно 0 или положительному целому числу, а система управления имеет возможность создания электромагнитных сил между первичной частью (2) и вторичной частью (3), которые уравновешиваются силами постоянных магнитов. Технический результат - повышение эффективности преобразования энергии в динамоэлектрической машине. 14 з.п. ф-лы, 9 ил.

во время каждого цикла ферромагнитной энергии ферромагнитные сердечники пары (C1, С2) действуют в последовательности во время чередующихся нейтральных полюсных шагов (р2) для двух отдельных четвертей цикла, каждый в полном цикле,
во время каждого цикла электромагнитной энергии полюсные группы пары также действуют в последовательности во время чередующихся проводящих полюсных шагов (p1) для двух отдельных четвертей цикла в полном цикле при помощи системы (5) управления, которая выполнена с возможностью коммутации нейтральных полюсных шагов (p2) и проводящих полюсных шагов (p1) попеременно на одну или на другую обмотку, которые взаимодействуют с постоянными магнитами.
| US 4190779 А, 26.02.1980 | |||
| ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2101840C1 |
| Шаговый электродвигатель | 1989 |
|
SU1823093A1 |
| Электрический шаговый двигатель | 1990 |
|
SU1809506A1 |
| WO 9723943 А1, 03.07.1997. | |||

