Изобретение относится к области электромашиностроения, в частности к шаговым двигателям (ШД).
Известен ШД [1] содержащий основной статор, выполненный в виде неподвижного магнитопровода с зубчатыми полюсными выступами, шаг которых по зубцам смежных полюсных выступов одного полюса отличается от шага по зубцам смежных полюсных выступов полюсов разной полярности, в пазах которого уложены катушки обмотки управления и обмотки возбуждения, образуя полюса чередующейся полярности, подключенные к блоку управления, вход которого подключен к источнику постоянного тока, и основной ротор, выполненный с зубчатыми полюсными выступами, с выходным валом.
Известен ШД [2] содержащий основной статор, выполненный в виде неподвижного явнополюсного кольцевого магнитопровода, на котором размещены обмотки управления, подключенные к блоку управления с возможностью их одновременного подключения, вход которого соединен с источником постоянного тока, и основной ротор с выходным валом, выполненный в виде постоянного магнита с чередующимися полюсами, число которых в два раза меньше, чем на статоре, и электропроводными вставками, размещенными на его поверхности между магнитными полюсами.
Известен ШД [3] содержащий основной статор, выполненный в виде неподвижного магнитопровода, на котором размещены две катушки обмотки управления, подключенные к блоку управления, вход которого соединен с источником постоянного тока, и два диаметрально установленные постоянные магниты с полюсными наконечниками, имеющие фиксирующие отверстия, зубчатый ротор, с диаметрально расположенными фиксирующими отверстиями напротив таких же отверстий в полюсном наконечнике магнитов, закрепленный на выходном валу, установленном в шарикоподшипниковых опорах, размещенных в немагнитном корпусе.
Известен ШД [4] являющийся наиболее близким техническим решением к данному изобретению, содержащий основной статор с рабочей обмоткой, подключенный к электронному коммутатору (ЭК), первый (управляющий) вход которого подключен к импульсному генератору, а второй (силовой) вход которого подключен к источнику постоянного тока (ИПТ), и основной ротор с выходным валом, выполненный, например, из постоянного магнита в форме звездочки.
Общими недостатками выше указанных известных ШД являются качание ротора, сопровождающее отработку одного шага, особенно в режиме холостого хода, зависимость структуры блока управления от количества фаз двигателя, фиксированное значение шага двигателя, необходимость демпфирования колебаний ротора дополнительными средствами, существование возможности выпадения ШД из синхронизма, необходимость учитывать геометрическую зависимость размеров и формы зубцов полюсов статора и ротора для достижения улучшенных параметров ШД.
Изобретение направлено на устранение качания ротора при отработке шага, на регулирование величины шага двигателя, а также частоты его отработки, на создание однофазного управления, что позволит унифицировать структуру блока управления, на устранение ситуаций, приводящих к выпадению ШД из синхронизма, на отсутствие определенных геометрических требований к размерам, количеству и форме полюсов ротора и статора.
Патентуемый двигатель отличается тем, что основной статор выполнен в виде двух явнополюсных магнитопроводов, один из которых неподвижный, а другой подвижный, установленные так, что оси симметрии неподвижного и подвижного магнитопроводов и основного ротора совпадают, а оси симметрии полюсов подвижного и неподвижного магнитопроводов основного статора не совпадают, причем подвижный магнитопровод установлен с возможностью содержать колебательное движение относительно неподвижного магнитопровода, на котором размещена обмотка фиксации положения ротора, а на подвижном рабочая обмотка, основной ротор выполнен в виде гибкого упругого стакана из магнитомягкого материала, установленного на выходном валу, и двигатель дополнительно снабжен датчиком положения с неподвижным, закрепленным на корпусе, и подвижным элементами, вспомогательными явнополюсными ротором, жестко соединенным с подвижным магнитопроводом основного статора и подвижным элементом датчика положения, и статором, закрепленным на корпусе, на одном из которых размещен элемент создания постоянного магнитного поля, а на другом обмотка управления, подключенная к первому выходу дополнительно введенного электронного коммутатора обмотки управления, причем сигнальный выход неподвижного элемента датчика положения соединен с информационным входом электронного коммутатора обмотки управления, управляющий вход которого соединен с источником постоянного тока, а выход с входом последовательно соединенных регулятора величины шага двигателя и формирователя частоты шага двигателей, выход которого соединен со входом электронного коммутатора, первый выход которого подключен к рабочей обмотке, а второй к обмотке фиксации положения ротора.
Двигатель также отличается тем, что неподвижный и подвижный магнитопровод основного статора расположены внутри основного ротора.
Двигатель отличается тем, что основной ротор размещен внутри неподвижного и подвижного магнитопровода.
Двигатель отличается тем, что неподвижный и подвижный магнитопроводы размещены один внутри другого с зазором, в котором установлен основной ротор.
Двигатель отличается тем, что элемент создания постоянного магнитного поля размещен на вспомогательном статоре, а обмотка управления на вспомогательном роторе.
Двигатель отличается тем, что элемент создания постоянного магнитного поля размещен на вспомогательном роторе, а обмотка управления на вспомогательном статоре.
Двигатель отличается тем, что элемент создания постоянного магнитного поля выполнен в виде постоянного магнита.
Двигатель отличается тем, что элемент создания постоянного магнитного поля выполнен в виде обмотки, подключенной к источнику постоянного тока.
Двигатель отличается тем, что обмотка подключена к элементу регулировки величины тока на ней, соединенного с третьим выходом электронного коммутатора обмотки управления.
Двигатель отличается тем, что подвижный магнитопровод основного статора, вспомогательный ротор и подвижный элемент датчика положения неподвижно закреплены на дополнительно введенном вспомогательном валу, установленным соосно с выходным валом с возможностью его поворота относительно неподвижного магнитопровода основного статора.
Патентуемый ШД, помимо основного статора с рабочей обмоткой, основного ротора, электронного коммутатора и источника постоянного тока содержит дополнительно введенные вспомогательные явнополюсные статор и ротор, электронный коммутатор обмотки управления, совокупность которых совместно с бесконтактным датчиком положения, контролирующим взаимное положение вспомогательного ротора и статора, создает автоколебательное движение вспомогательного ротора с постоянными частотой и амплитудой и жестко связанного со вспомогательным ротором подвижного магнитопровода основного с рабочей обмоткой, оси полюсов которого не совпадают с осями полюсов неподвижного магнитопровода основного статора. В момент отклонения подвижного магнитопровода от исходного положения выхода электронного коммутатора подается управляющий импульс в рабочую обмотку, в которой создается магнитное поле, приводящее к намагничиванию и деформации упругого стакана основного ротора в направлении полюсов подвижного магнитопровода вода и увлекающее за собой основной ротор с последующим поворотом выходного вала на некоторый угол. При возвратном движении подвижного магнитопровода управляющий импульс подается со второго выхода электронного коммутатора в обмотку фиксации положение ротора, вследствие чего создается магнитное поле, намагничивающее и деформирующее упругий стакан основного ротора в направлении полюсов неподвижного магнитопровода, фиксируя предыдущее угловое положение основного ротора с выходным валом. Таким образом, данная система исключает качание ротора при отработке шага, а за счет введения в структуру последовательно соединенных регулятора величины шага двигателя и формирователя частоты двигателя достигается возможность регулирования величины шага двигателя, а также частоты его отработки, причем управление однофазными обмотками рабочей и фиксации положения ротора осуществляется с помощью электронного коммутатора.
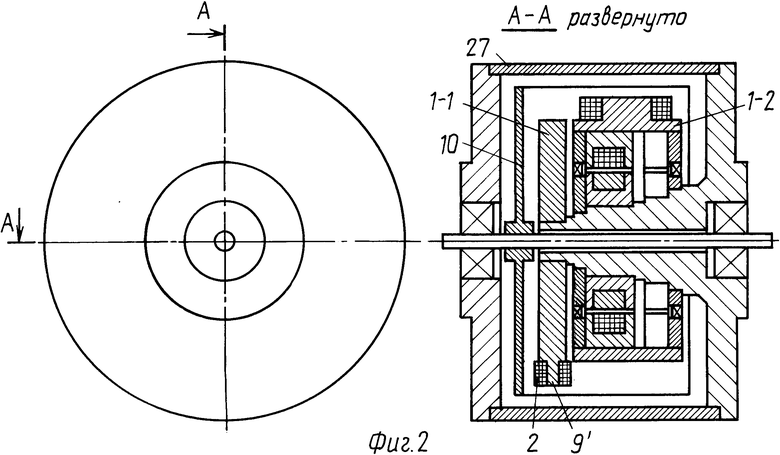
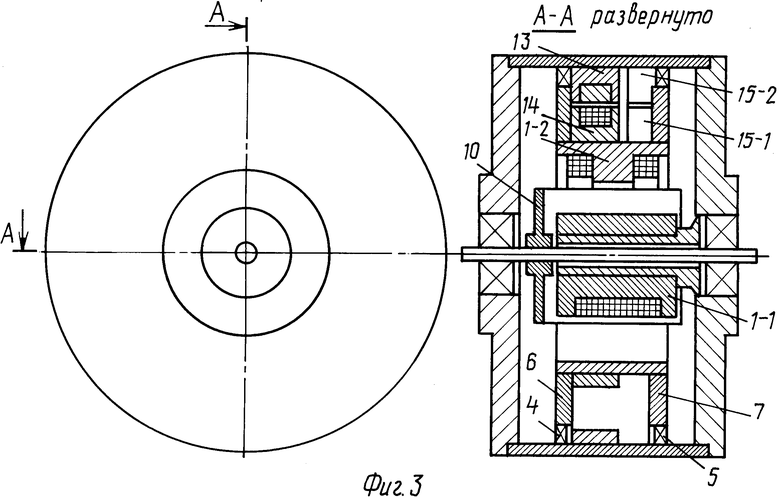
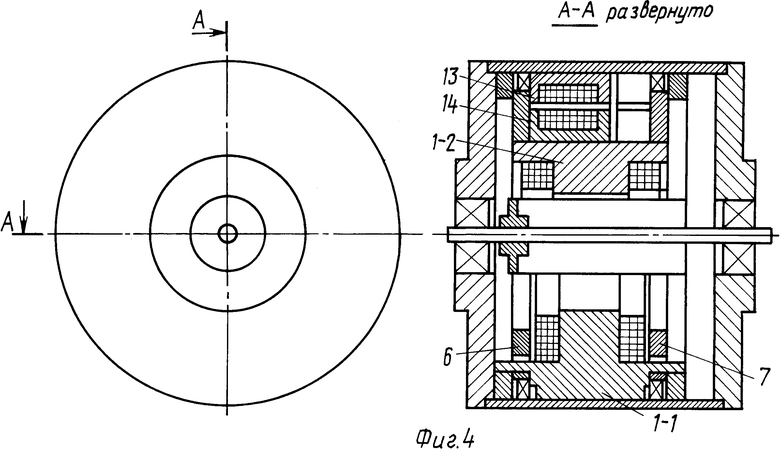
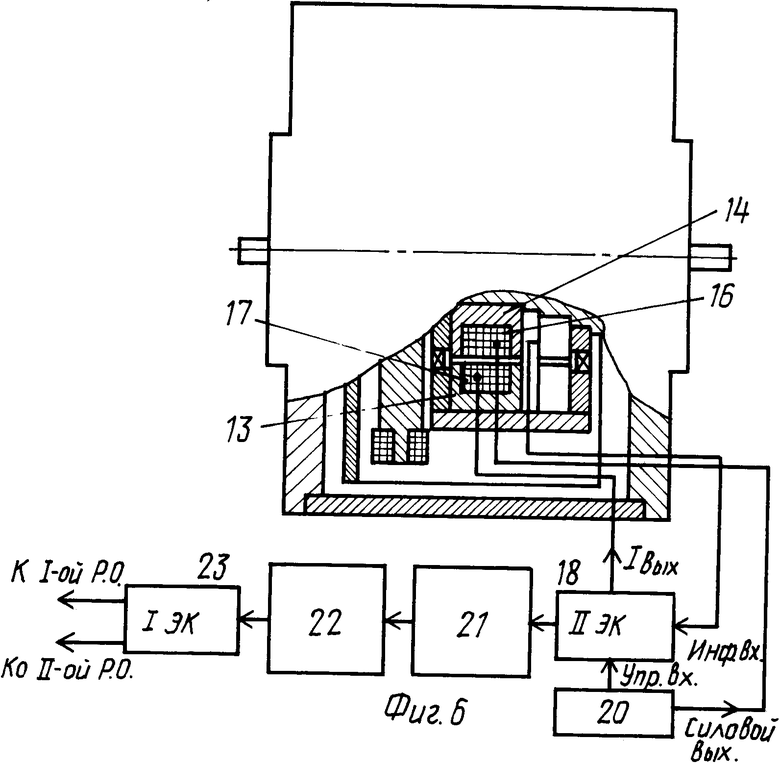
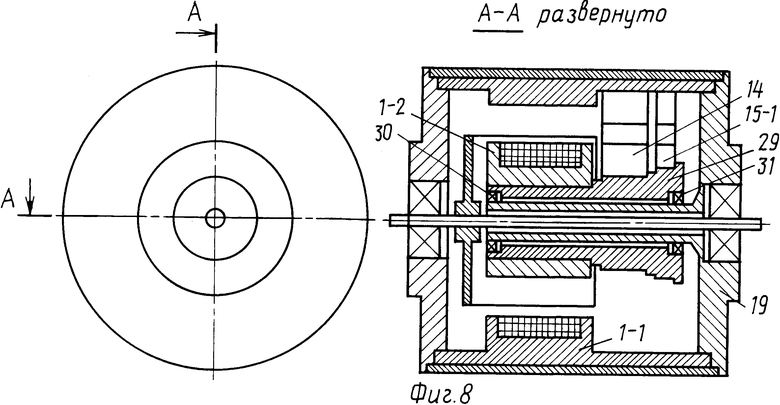
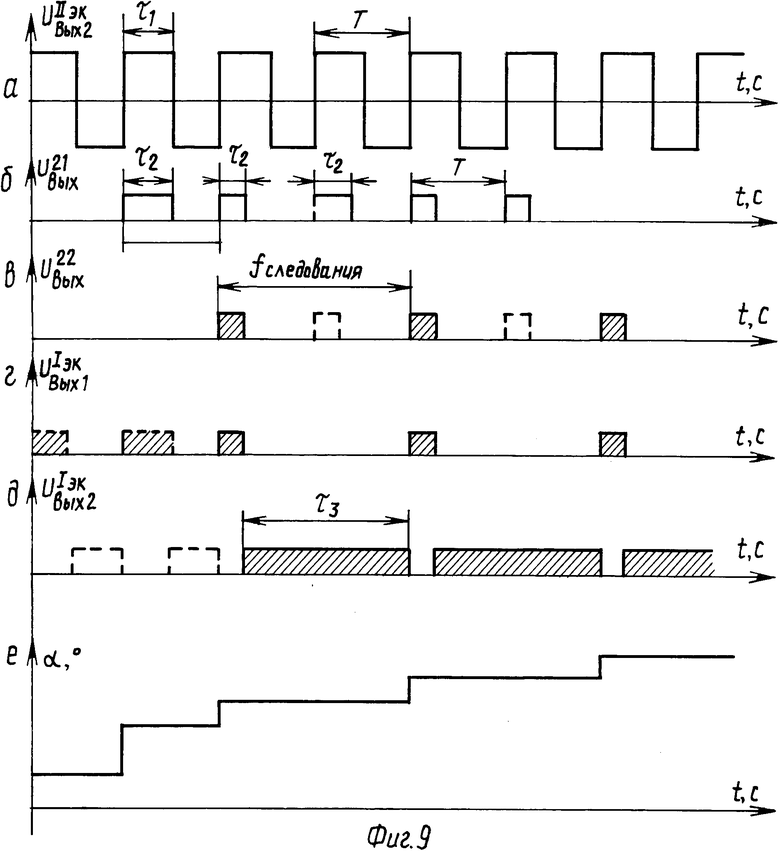
На фиг. 1 представлена возможная реализация устройства ШД с одной парой рабочих и одной парой обмоток фиксации положения ротора, расположенных на подвижном и неподвижном явнополюсных магнитопроводах соответственно, и полюса которых сдвинуты на 90o относительно друг друга, при этом подвижный магнитопровод основного статора расположен внутри неподвижного магнитопровода с зазором, в котором помещен основной ротор; на фиг. 2 вариант выполнения ШД, при котором неподвижный магнитопровод и подвижный магнитопровод основного статора расположены внутри основного ротора; на фиг. 3 вариант выполнения ШД, при котором неподвижный магнитопровод расположен внутри подвижного магнитопровода с зазором, в котором помещен основной ротор; на фиг. 4 - вариант выполнения ШД, при котором основной ротор расположен внутри неподвижного магнитопровода и подвижного магнитопровода основного статора; на фиг. 5 вариант выполнения ШД, при котором элемент создания постоянного магнитного поля размещен на вспомогательном роторе и выполнен в виде постоянного магнита, а обмотка управления на вспомогательном статоре; на фиг. 6 вариант выполнения ШД, при котором элемент создания постоянного магнитного поля выполнен в виде обмотки, подключенной к источнику постоянного тока; на фиг. 7 вариант выполнения ШД, при котором элемент создания постоянного магнитного поля выполнен в виде обмотки, подключенной к третьему выходу электронного коммутатора обмотки управления через элемент регулировки величины тока в ней; на фиг. 8 вариант выполнения ШД, при котором подвижный магнитопровод, вспомогательный ротор и подвижный элемент датчика положения неподвижно закреплен на дополнительно введенном вспомогательном валу, установленном соосно с выходным валом с возможностью его поворота относительно корпуса в подшипниковых опорах, размещенных в подшипниковом щите; на фиг. 9 - представлены временные диаграммы напряжений на выходах: а электронного коммутатора обмотки управления; б регулятора величины шага двигателя; в - формирователя частоты шага двигателя; г на первом выходе электронного коммутатора; д на втором выходе электронного коммутатора; е опора зависимости величины углового поворота выходного вала двигателя от длительности управляющего импульса в рабочей обмотке.
Шаговый двигатель (фиг. 1-8) содержит основной статор, выполненный в виде явнополюсного неподвижного магнитопровода 1-1 обмоткой 2 фиксации положения ротора и явнополюсного подвижного магнитопровода 1-2 с рабочей обмоткой 3, причем подвижный магнитопровод 1-2 установлен с возможностью совершать колебательное движение относительно неподвижного магнитопровода 1-1 в опорах 4 и 5 первого и второго подшипниковых щитов 6 и 7 соответственно, и оси полюсов 8 и 8' подвижного магнитопровода 1-2 не совпадают с осями полюсов 9 и 9' неподвижного магнитопровода 1-1, основной ротор 10, выполненный в виде гибкого упругого стакана 11 из магнитомягкого материала, закрепленного на выходном валу 12, причем неподвижный магнитопровод 1-1, подвижный магнитопровод 1-2 и основной ротор 10 расположены на оси симметрично, вспомогательный явнополюсный статор 13 и вспомогательный явнополюсный ротор 14, жестко соединенный с подвижным магнитопроводом 1-2 и подвижным элементом 15-1 датчика положения, имеющим также неподвижный элемент 15-2, при этом на вспомогательном статоре 13 размещен элемент 16 создания постоянного магнитного поля, а на вспомогательном роторе 14 обмотка управления 17, подключенная к первому выходу электронного коммутатора обмотки управления 18, а неподвижный элемент 15-2 датчика положения жестко закреплен на третьем подшипниковом щите 19 и своим сигнальным выходом соединен с информационным входом электронного коммутатора обмотки управления 18, управляющий вход которого соединен с источником постоянного тока 20, а второй выход со входом последовательно соединенных регулятора 21 величины шага двигателя, формирователя 22 частоты шага двигателя и электронного коммутатора 23, второй выход которого подключен к обмотке 2 фиксации положения ротора, а первый к рабочей обмотке 3. Через отверстие в третьем подшипниковом щите 19 проходит выходной вал 12 основного ротора 10, установленный в шарикоподшипниковых опорах 24 и 25, размещенных в четвертом и третьем подшипниковом щите 26 и 19 соответственно корпуса 27.
Подвижный магнитопровод 1-2 основного статора конструктивно может быть расположен внутри неподвижного магнитопровода 1-1 с зазором, в котором помещен основной ротор 10 (фиг. 1).
Неподвижный магнитопровод 1-1 и подвижный магнитопровод 1-2 основного статора конструктивно могут быть расположены внутри основного ротора 10 (фиг. 2).
Неподвижный магнитопровод 1-1 конструктивно может быть расположен внутри подвижного магнитопровода 1-2 с зазором, в котором помещен основной ротор 10 (фиг. 3).
Основной ротор 10 конструктивно может быть расположен внутри неподвижного магнитопровода 1-1 и подвижного магнитопровода 1-2 основного статора (фиг. 4).
Элемент 16 создания постоянного магнитного поля может быть размещен на вспомогательном роторе 14, а обмотка управления 17 на вспомогательном статоре 13 (фиг. 5).
Элемент 16 создания постоянного магнитного поля может быть выполнен в виде постоянного магнита (фиг. 5) или в виде обмотки, подключенной к источнику постоянного тока 20 (фиг. 6), или к третьему выходу электронного коммутатора обмотки управления 18 через элемент 28 регулировки величины тока в ней (фиг. 7).
Подвижный магнитопровод 1-2, вспомогательный ротор 14 и подвижный элемент 15-1 датчика положения неподвижно закреплены на дополнительно введенном вспомогательном валу 29, установленном соосно с выходным валом 12 с возможностью его поворота относительно корпуса 27 в подшипниковых опорах 30 и 31, размещенных в третьем подшипниковом щите 19 (фиг.8).
Двигатель работает следующим образом. В начальный момент подвижный элемент 15-1 датчика положения находится в таком положении, что на выходе формируется сигнал рассогласования, например, положительной полярности "+Uрас", который поступает на управляющий вход электронного коммутатора обмотки управления (ЭКОУ) 18, подключающий ИПТ 20 к обмотке управления 17, в результате чего в ней начинает протекать ток, например, положительной полярности.При взаимодействии магнитных полей, создаваемых обмоткой управления 17 и элементом 16 создания постоянного магнитного поля, дополнительно введенный вспомогательный явнополюсный ротор 14 начинает поворачиваться. При достижении максимального угла отклонения вспомогательного явнополюсного ротора 14 от среднего положения подвижный элемент 15-1 датчика положения перемещается так, что на выходе неподвижного элемента 15-2 датчика положения формируется сигнал отрицательной полярности "-Uрас", переключающий ЭКОУ 18, с выхода которого подается ток отрицательной полярности в обмотку управления 17 от ИПТ 20. В результате чего в обмотке управления 17 создается магнитный поток, направление которого противоположно исходному, и вспомогательный явнополюсный ротор 14 начинает двигаться в противоположную сторону. По мере достижения максимального угла отклонения вспомогательного ротора 14 от среднего положения датчик положения переключается и на его выходе формируется сигнал "+Uрас". Это вызывает новое переключение ЭКОУ 18 и подачу тока положительной полярности в обмотку управления 17. В результате этого вспомогательный ротор 14 начинает двигаться в первоначальном направлении. Далее процесс переключения повторяется, вследствие чего вспомогательный ротор 14 совершает гармонические колебания с некоторыми постоянными амплитудой и частотой.
Такое же колебательное движение совершает и подвижный магнитопровод 1-2 основного статора.
ЭКОУ 18 формирует в обмотке управления 17 прямоугольные импульсы тока, при наличии которых обеспечивается постоянство мощности, выделяемой в обмотке управления 17. Последовательность разнополярных импульсов с выхода ЭКОУ 18 (фиг.9,а) поступает на вход регулятора 21 величины шага двигателя, который вырабатывает управляющие импульсы длительностью τ2 (фиг. 9,б), соответствующей задаваемой величине шага, в интервале, определяемом длительностью, например, положительного импульса τ1 задающей последовательности разнополярных импульсов, а период следования управляющих и разнополярных импульсов совпадает. Причем частота следования задающих разнополярных импульсов характеризуется частотой автоколебаний вспомогательного ротора 14. Эта последовательность управляющих импульсов поступает на вход формирователя 22 частоты шага двигателя и формирует частоту следования fслед импульсов управления, определяя частоту шага двигателя (фиг.9,в). Далее сформированная последовательность импульсов управления подается на ЭК 23, с первого выхода которого эта последовательность поступает в рабочую обмотку 3, а со второго выхода импульсы, сформированные по срезу и фронту управляющих импульсов, снимаемых с выхода формирователя 22 частоты шага двигателя, подаются в обмотку 2 фиксации положения ротора.
По фронту управляющего импульса устанавливается фронт импульса, подаваемого в рабочую обмотку 3 подвижного магнитопровода 1-2, в результате чего в ней начинает протекать ток, создающий магнитный поток Фпм, который замыкается на другом его полюсе 8' через основной ротор 10, в результате чего стакан 11 ротора намагничивается и деформируется под действием сил магнитного тяжения в районе полюсов 8 и 8'.
При отклонении подвижного магнитопровода 1-2, магнитное поле которого взаимодействует с магнитным полем стакана 11, выполненного из магнитомягкого материала, возникает движущий момент, увлекающий основной ротор 10 вслед за подвижным магнитопроводом 1-2.
По срезу управляющего импульса происходит переключение ЭК 23, вследствие чего в рабочую обмотку 3 ток не подается, намагничивание и деформация стакана 11 основного ротора 10 в направлении полюсов 8 и 8' прекращается. Однако одновременно по срезу управляющего импульса устанавливается фронт импульса, подаваемого в обмотку фиксации положения ротора 2 неподвижного магнитопровода 1-1, в которой протекающий ток создает магнитный поток Фнпм, замыкающийся на другом его полюсе 9' через основной ротор 10, в результате чего стакан 11 намагничивается и деформируется под действием сил магнитного тяжения в районе полюсов 9 и 9' и таким образом удерживается предыдущее угловое отклонение основного ротора 10.
По фронту управляющего импульса происходит переключение ЭК 23, вследствие чего формируется срез импульса, подаваемого в обмотку фиксации положения ротора 2: ток не подается, магнитный поток Фнпм не создается и прекращается намагничивание и деформация стакана 11 основного ротора 10 в направлении полюсов 9 и 9'. Однако одновременно по фронту управляющего импульса устанавливается фронт импульса, подаваемого в рабочую обмотку 3, в которой протекающий ток создает магнитный поток Фпм, намагничивающий и деформирующий гибкий стакан 11, при взаимодействии магнитного поля которого с магнитным полем отклоняющего подвижного магнитопровода 1-2 возникает движущий момент, увлекающий основной ротор 10 вслед за подвижным магнитопроводом 1-2. Далее переключения происходя аналогично.
Таким образом, вследствие использования вспомогательного ротора 14 в совокупности с ЭКОУ 18 и бесконтактным датчиком положения создаются стабильные низкочастотные колебания,передаваемые подвижному магнитопроводу 1-2, который в совокупности с неподвижным магнитопроводом 1-1 и соответствующими обмоткой 2 фиксации положения ротора и рабочей обмоткой 3 с раздельным управлением через ЭК 23 создает режим работы, при котором устраняется качание основного ротора 10 при отработке шага.В результате использования двух однофазных обмоток 2 и 3 с раздельным управлением через ЭК 23 отпадает необходимость использовать многофазовое управление, что значительно упрощает структуру блока управления шаговым двигателем, а также позволяет унифицировать его структуру. Причем регулирование величины шага двигателя и формирование частоты его отработки осуществляется соответствующими устройствами.
При вариантах возможной реализации БДПТ, указанных на фиг. 2-8, работа производится аналогичным образом.
Для получения прямоугольных импульсов на выходе ЭКОУ 18 в экспериментальном макете ШД использован датчик положения, построенный на базе фотоэлементов (АЛ107А и оптрон АОУ103А). ЭКОУ 18 и источник 15 постоянного тока могут быть реализованы по одной из известных схем. Элементной базой ЭК 23, элемента 28 регулировки величины тока в обмотке являлись микросхемы К176ТМ2, К555ЛН2.
Источники информации:
1. Авторское свидетельство РФ N 1809506, МКИ 4 H 02 K 37/00,БИ N 14, 1993.
2. Авторское свидетельство РФ N 1823093, МКИ 4 H 02 K 37/00, БИ N 23, 1993.
3. Авторское свидетельство РФ N 1812600, МКИ 4 H 02 K 37/00, БИ N 16, 1993.
4. Брускин Д.Э. Зорохович А.Е. Хвостов В.С. Электрические машины и микромашины. М. Высшая школа, 1990, с. 389.


Использование: в дискретном электроприводе. Сущность изобретения: шаговый двигатель помимо основного статора 1-1 с первой рабочей обмоткой 2, основного ротора 10, электронного коммутатора и источника постоянного тока содержит дополнительно введенные вспомогательные явнополюсные статор 13 и ротор 14, электронный коммутатор обмотки управления 18, совокупность которых совместно с бесконтактным датчиком положения, контролирующим взаимное положение вспомогательного ротора и статора, создает автоколебательное движение вспомогательного ротора 14 с постоянными частотой и амплитудой и жестко связанного со вспомогательным ротором 14 подвижного магнитопровода 1-2 основного статора с рабочей обмоткой 3, оси полюсов которого не совпадают с осями полюсов неподвижного магнитопровода 1-1 основного статора. 9 з.п. ф-лы, 8 ил.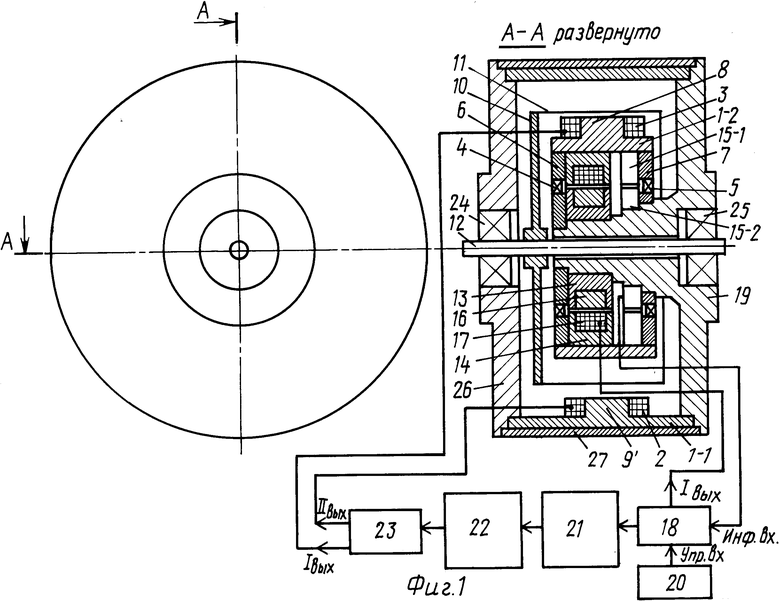
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, патент, 1809506, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, патент, 1823093, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, патент, 1812600, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Брускин Д.Э., Захарович А.Е., Хвостов В.С | |||
| Электрические машины и микромашины | |||
| - М.: Высшая школа, 1990, с.389. | |||
